机器学习笔记之优化算法(十一)凸函数铺垫:梯度与方向导数
机器学习笔记之优化算法——凸函数铺垫:梯度与方向导数
- 引言
- 回顾:偏导数
- 方向余弦
- 方向导数
- 方向导数的几何意义
- 方向导数的定义
- 方向导数与偏导数之间的关联关系
- 证明过程
- 梯度 ( Gradient ) (\text{Gradient}) (Gradient)
引言
本节作为介绍凸函数的铺垫,简单介绍方向导数与梯度。
回顾:偏导数
以二元函数 f ( x , y ) f(x,y) f(x,y)为例,其关于变量的偏导数表示:三维空间中,曲面上某一点沿着 x x x轴方向或 y y y轴方向变化的速率。也就是说:
在梯度下降法——铺垫中解释过,下图中描述斜率的红色切线不是方向;真正描述方向的是红色箭头。
- ∂ f ( x , y ) ∂ x = f x ( x , y ) \begin{aligned}\frac{\partial f(x,y)}{\partial x} = f_x(x,y)\end{aligned} ∂x∂f(x,y)=fx(x,y)表示函数 f ( x , y ) f(x,y) f(x,y)沿着 x x x轴方向的斜率;
下图中P \mathcal P P点沿着 x x x轴方向的红色直线所描述的斜率; - 同理, ∂ f ( x , y ) ∂ y = f y ( x , y ) \begin{aligned}\frac{\partial f(x,y)}{\partial y} = f_y(x,y)\end{aligned} ∂y∂f(x,y)=fy(x,y)表示函数 f ( x , y ) f(x,y) f(x,y)沿着 y y y轴方向的斜率。
下图中P \mathcal P P点沿着 y y y轴方向的红色直线所描述的斜率。

f ( x , y ) f(x,y) f(x,y)在点 P ( x 0 , y 0 ) \mathcal P(x_0,y_0) P(x0,y0)关于 x , y x,y x,y的偏导数分别表示如下:
第一个公式即: y = y 0 y=y_0 y=y0不变,观察变量 x x x的斜率; x x x同理。
{ f x ( x 0 , y 0 ) = lim Δ x ⇒ 0 f ( x 0 + Δ x , y 0 ) − f ( x 0 , y 0 ) Δ x f y ( x 0 , y 0 ) = lim Δ y ⇒ 0 f ( x 0 , y + Δ y ) − f ( x 0 , y 0 ) Δ y \begin{cases} \begin{aligned} & f_x(x_0,y_0) = \mathop{\lim}\limits_{\Delta x \Rightarrow 0} \frac{f(x_0 + \Delta x,y_0) - f(x_0,y_0)}{\Delta x} \\ & f_y(x_0,y_0) = \mathop{\lim}\limits_{\Delta y \Rightarrow 0} \frac{f(x_0,y+\Delta y) - f(x_0,y_0)}{\Delta y} \end{aligned} \end{cases} ⎩ ⎨ ⎧fx(x0,y0)=Δx⇒0limΔxf(x0+Δx,y0)−f(x0,y0)fy(x0,y0)=Δy⇒0limΔyf(x0,y+Δy)−f(x0,y0)
观察上图中的 P \mathcal P P点,它仅仅在 x , y x,y x,y两个方向(红色箭头)上有导数吗 ? ? ?并不是,在其他方向同样可以存在导数。由此,引出方向导数 ( Directional Derivative ) (\text{Directional Derivative}) (Directional Derivative)的概念。
例如下图中 P \mathcal P P点,其导数方向可以有很多。例如黄色箭头描述的方向。

方向余弦
关于某向量 l ⃗ \vec l l在坐标系中表示如下:

在坐标系中记作 l ⃗ = ( a , b ) \vec l =(a,b) l=(a,b);如果要将 l ⃗ \vec l l单位化,得到单位向量 l ⃗ o \vec l^{o} lo,则执行:
l ⃗ o = 1 a 2 + b 2 ( a , b ) = ( a a 2 + b 2 , b a 2 + b 2 ) \begin{aligned} \vec l^{o} & = \frac{1}{\sqrt{a^2 + b^2}} (a,b) \\ & = \left(\frac{a}{\sqrt{a^2 + b^2}},\frac{b}{\sqrt{a^2 + b^2}}\right) \end{aligned} lo=a2+b21(a,b)=(a2+b2a,a2+b2b)
观察上图,可以将 a a 2 + b 2 = cos α , b a 2 + b 2 = sin α = cos β \begin{aligned}\frac{a}{\sqrt{a^2 + b^2}} = \cos \alpha,\frac{b}{\sqrt{a^2 + b^2}} = \sin \alpha = \cos \beta\end{aligned} a2+b2a=cosα,a2+b2b=sinα=cosβ,最终 l ⃗ o \vec l^{o} lo可表示为: ( cos α , cos β ) (\cos \alpha,\cos \beta) (cosα,cosβ)
也就是说,单位向量可以表示成这种方向余弦的形式。
方向导数
方向导数的几何意义
依然以上述图形示例:可能存在各种各样(黄色箭头)的方向,这里以黄色直线箭头为例,该方向的在函数图像中的投影会呈现一条轨迹(黄色实线):
实际上这条轨迹就是过 P \mathcal P P点,在该方向朝向的、与坐标平面 X O Y \mathcal X\mathcal O\mathcal Y XOY垂直的平面把 f ( x , y ) f(x,y) f(x,y)截断产生的图像

去掉其他多余的箭头,过 P ( x 0 , y 0 ) \mathcal P(x_0,y_0) P(x0,y0)对应的函数结果位置做一条切线,而切线的斜率即函数在 P \mathcal P P点处的斜率(黑色直线):
其中黄色菱形表示截断平面中间由实线与虚线组成的类似梯形的区域表示截面,只不过虚线部分的轨迹并不是当前方向对应的轨迹,不是我们我们关注的对象。

由此可见:在 P \mathcal P P点的 36 0 o 360^o 360o方向上,每一个方向都存在一个截面,随着方向的变化,对应的函数结果 f ( x 0 , y 0 ) f(x_0,y_0) f(x0,y0)在截面上的位置得到不同的切线(斜率)结果。
准确来说是截线而不是截面,因为函数 f ( ⋅ ) f(\cdot) f(⋅)是空心的。
方向导数的定义
如何定义方向导数 ? ? ?见下图:

上述图像描述 X O Y \mathcal X\mathcal O\mathcal Y XOY平面上, P ( x 0 , y 0 ) \mathcal P(x_0,y_0) P(x0,y0)点沿着 l ⃗ \vec l l方向前进了一个极小的长度 t t t并到达 A \mathcal A A点,对应 P \mathcal P P在函数上的映射结果 z 0 = f ( x 0 , y 0 ) z_0= f(x_0,y_0) z0=f(x0,y0)也会沿着对应的轨迹移动一个距离,并达到新的位置 z 0 ′ z_0' z0′;假设 Δ Z = ∣ z 0 − z 0 ′ ∣ \Delta \mathcal Z = |z_0 - z_0'| ΔZ=∣z0−z0′∣,对应的方向导数可表示为:
lim t ⇒ 0 Δ Z t \mathop{\lim}\limits_{t \Rightarrow 0} \frac{\Delta \mathcal Z}{t} t⇒0limtΔZ
已知 P \mathcal P P点坐标是 ( x 0 , y 0 ) (x_0,y_0) (x0,y0),并且已知距离 t t t以及对应的 α , β \alpha,\beta α,β夹角,因而可以得到 A \mathcal A A的坐标: A ( x 0 + t ⋅ cos α , y 0 + t ⋅ cos β ) \mathcal A (x_0 + t \cdot \cos \alpha,y_0 + t \cdot \cos \beta) A(x0+t⋅cosα,y0+t⋅cosβ)。最终可以将 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)处关于向量 l ⃗ \vec l l的方向导数 ∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) \begin{aligned}\frac{\partial \mathcal Z}{\partial {\vec l}}|_{(x_0,y_0)}\end{aligned} ∂l∂Z∣(x0,y0)表达为如下形式:
∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) = lim t ⇒ 0 f ( x 0 + t ⋅ cos α , y 0 + t ⋅ cos β ) − f ( x 0 , y 0 ) t \frac{\partial \mathcal Z}{\partial {\vec l}}|_{(x_0,y_0)} = \mathop{\lim}\limits_{t \Rightarrow 0} \frac{f(x_0 + t \cdot \cos \alpha,y_0 + t \cdot \cos \beta) - f(x_0,y_0)}{t} ∂l∂Z∣(x0,y0)=t⇒0limtf(x0+t⋅cosα,y0+t⋅cosβ)−f(x0,y0)
基于方向导数重新观察偏导数,可以发现:方向导数就是偏导数的一种特例。以 ∂ f ( x , y ) ∂ x \begin{aligned}\frac{\partial f(x,y)}{\partial x}\end{aligned} ∂x∂f(x,y)为例。它等价于: l ⃗ \vec l l的方向是 x x x轴的正方向:

此时: α = 0 , β = π 2 ⇒ cos α = 1 , cos β = 0 \begin{aligned}\alpha = 0,\beta = \frac{\pi}{2} \Rightarrow \cos \alpha = 1,\cos \beta = 0\end{aligned} α=0,β=2π⇒cosα=1,cosβ=0从而有:
此时的方向导数退化成了偏导数, ∂ f ( x , y ) ∂ y \begin{aligned}\frac{\partial f(x,y)}{\partial y}\end{aligned} ∂y∂f(x,y)同理,这里不再赘述。
∂ Z ∂ l ⃗ = lim t ⇒ 0 f ( x 0 + t , y 0 ) − f ( x 0 , y 0 ) t = f x ( x 0 , y 0 ) = ∂ f ( x , y ) ∂ x ∣ ( x 0 , y 0 ) \begin{aligned} \frac{\partial \mathcal Z}{\partial \vec l} = \mathop{\lim}\limits_{t \Rightarrow 0} \frac{f(x_0 + t,y_0) - f(x_0,y_0)}{t} = f_x(x_0,y_0) = \frac{\partial f(x,y)}{\partial x}|_{(x_0,y_0)} \end{aligned} ∂l∂Z=t⇒0limtf(x0+t,y0)−f(x0,y0)=fx(x0,y0)=∂x∂f(x,y)∣(x0,y0)
方向导数与偏导数之间的关联关系
在函数 f ( ⋅ ) f(\cdot) f(⋅)在其定义域内可微的条件下,该函数在 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)处关于方向向量 l ⃗ \vec l l的方向导数 ∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) \begin{aligned}\frac{\partial \mathcal Z}{\partial {\vec l}}|_{(x_0,y_0)}\end{aligned} ∂l∂Z∣(x0,y0)与该函数在 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)处的偏导数 f x ( x 0 , y 0 ) , f y ( x 0 , y 0 ) f_x(x_0,y_0),f_y(x_0,y_0) fx(x0,y0),fy(x0,y0)之间的关联关系表示如下:
∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) = f x ( x 0 , y 0 ) ⋅ cos α + f y ( x 0 , y 0 ) ⋅ cos β \begin{aligned}\frac{\partial \mathcal Z}{\partial {\vec l}}|_{(x_0,y_0)} = f_x(x_0,y_0) \cdot \cos \alpha + f_y(x_0,y_0) \cdot \cos \beta\end{aligned} ∂l∂Z∣(x0,y0)=fx(x0,y0)⋅cosα+fy(x0,y0)⋅cosβ
证明过程
- 在函数 f ( ⋅ ) f(\cdot) f(⋅)可微的条件下,在 ( x 0 , y 0 ) (x_0,y_0) (x0,y0)点关于 Z \mathcal Z Z的变化量 Δ Z \Delta \mathcal Z ΔZ可表示为:
其中O [ ( Δ x ) 2 + ( Δ y ) 2 ] \mathcal O\left[\sqrt{({\Delta x})^2 + (\Delta y)^2}\right] O[(Δx)2+(Δy)2]表示关于( Δ x ) 2 + ( Δ y ) 2 \sqrt{({\Delta x})^2 + (\Delta y)^2} (Δx)2+(Δy)2的高阶无穷小。
Δ Z = f x ( x 0 , y 0 ) ⋅ Δ x + f y ( x 0 , y 0 ) ⋅ Δ y + O [ ( Δ x ) 2 + ( Δ y ) 2 ] \Delta \mathcal Z = f_x(x_0,y_0) \cdot \Delta x + f_y(x_0,y_0) \cdot \Delta y + \mathcal O\left[\sqrt{({\Delta x})^2 + (\Delta y)^2}\right] ΔZ=fx(x0,y0)⋅Δx+fy(x0,y0)⋅Δy+O[(Δx)2+(Δy)2] - 由于全微分在任意方向上均成立。

因而有:
{ Δ x = t ⋅ cos α Δ y = t ⋅ cos β ( Δ x ) 2 + ( Δ y ) 2 = t 2 ⋅ ( cos 2 α + cos 2 β ) = t 2 α + β = π 2 \begin{cases} \begin{aligned} & \Delta x = t \cdot \cos \alpha \\ & \Delta y = t \cdot \cos \beta \\ & (\Delta x)^2 + (\Delta y)^2 = t^2 \cdot (\cos^2 \alpha + \cos^2 \beta) = t^2 \quad \alpha +\beta = \frac{\pi}{2} \end{aligned} \end{cases} ⎩ ⎨ ⎧Δx=t⋅cosαΔy=t⋅cosβ(Δx)2+(Δy)2=t2⋅(cos2α+cos2β)=t2α+β=2π - 观察等式左侧:
Δ Z \Delta \mathcal Z ΔZ表示P ( x 0 , y 0 ) \mathcal P(x_0,y_0) P(x0,y0)沿着l ⃗ \vec l l移动t t t到达A \mathcal A A点前后函数结果的变化量。
I left = Δ Z = f ( x 0 + t ⋅ cos α , y 0 + t ⋅ cos β ) − f ( x 0 , y 0 ) \mathcal I_{\text{left}} = \Delta \mathcal Z = f(x_0 + t \cdot \cos \alpha,y_0 + t \cdot \cos \beta) - f(x_0,y_0) Ileft=ΔZ=f(x0+t⋅cosα,y0+t⋅cosβ)−f(x0,y0)
观察等式右侧:
将上述公式代入。
I right = f x ( x 0 , y 0 ) ⋅ t ⋅ cos α + f y ( x 0 , y 0 ) ⋅ t ⋅ cos β + O ( t ) \mathcal I_{\text{right}} = f_x(x_0,y_0) \cdot t \cdot \cos \alpha + f_y(x_0,y_0) \cdot t \cdot \cos \beta + \mathcal O(t) Iright=fx(x0,y0)⋅t⋅cosα+fy(x0,y0)⋅t⋅cosβ+O(t) - 将 I left , I right \mathcal I_{\text{left}},\mathcal I_{\text{right}} Ileft,Iright同时除以 t t t,等式两端依然相等:
并令I left \mathcal I_{\text{left}} Ileft中t ⇒ 0 t \Rightarrow 0 t⇒0,因为I Right \mathcal I_{\text{Right}} IRight中不含t ( O ( t ) t = 0 ) t \left(\begin{aligned}\frac{\mathcal O(t)}{t} = 0\end{aligned} \right) t(tO(t)=0),因此不产生影响。
{ I right t = f x ( x 0 , y 0 ) ⋅ cos α ⋅ t + f y ( x 0 , y 0 ) ⋅ cos β ⋅ t + O ( t ) t = f x ( x 0 , y 0 ) ⋅ cos α + f y ( x 0 , y 0 ) ⋅ cos β lim t ⇒ 0 I l e f t t = lim t ⇒ 0 f ( x 0 + t ⋅ cos α , y 0 + t ⋅ cos β ) − f ( x 0 , y 0 ) t = ∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) \begin{cases} \begin{aligned} \frac{\mathcal I_{\text{right}}}{t} & = \frac{f_x(x_0,y_0) \cdot \cos \alpha \cdot t + f_y(x_0,y_0) \cdot \cos \beta \cdot t + \mathcal O(t)}{t} \\ & = f_x(x_0,y_0) \cdot \cos \alpha + f_y(x_0,y_0) \cdot \cos \beta \\ \mathop{\lim}\limits_{t \Rightarrow 0} \frac{\mathcal I_{left}}{t} & = \mathop{\lim}\limits_{t \Rightarrow 0} \frac{f(x_0 + t \cdot \cos \alpha,y_0 + t \cdot \cos \beta) - f(x_0,y_0)}{t} \\ & = \frac{\partial \mathcal Z}{\partial \vec l}|_{(x_0,y_0)} \end{aligned} \end{cases} ⎩ ⎨ ⎧tIrightt⇒0limtIleft=tfx(x0,y0)⋅cosα⋅t+fy(x0,y0)⋅cosβ⋅t+O(t)=fx(x0,y0)⋅cosα+fy(x0,y0)⋅cosβ=t⇒0limtf(x0+t⋅cosα,y0+t⋅cosβ)−f(x0,y0)=∂l∂Z∣(x0,y0) - 最终有:
∂ Z ∂ l ⃗ ∣ ( x 0 , y 0 ) = f x ( x 0 , y 0 ) ⋅ cos α + f y ( x 0 , y 0 ) ⋅ cos β \frac{\partial \mathcal Z}{\partial \vec l}|_{(x_0,y_0)} = f_x(x_0,y_0) \cdot \cos \alpha + f_y(x_0,y_0) \cdot \cos \beta ∂l∂Z∣(x0,y0)=fx(x0,y0)⋅cosα+fy(x0,y0)⋅cosβ
证毕。
梯度 ( Gradient ) (\text{Gradient}) (Gradient)
关于梯度,它的返回结果是一个向量形式。关于函数 f ( x , y ) f(x,y) f(x,y),其梯度向量通常记作: grad f ( x , y ) \text{grad } f(x,y) grad f(x,y)或者 ∇ f ( x , y ) \nabla f(x,y) ∇f(x,y)。
其具体表示为:
∇ f ( x , y ) = [ f x ( x , y ) , f y ( x , y ) ] \nabla f(x,y) = \left[f_x(x,y),f_y(x,y)\right] ∇f(x,y)=[fx(x,y),fy(x,y)]
很明显:梯度向量中的元素就是 f ( x , y ) f(x,y) f(x,y)针对不同自变量 x , y x,y x,y的偏导数。因此它的计算并不麻烦,如何理解梯度向量 ? ? ?具体从方向和大小两个角度对梯度向量进行认知。
回顾上面的方向导数 ∂ Z ∂ l ⃗ \begin{aligned}\frac{\partial \mathcal Z}{\partial \vec l}\end{aligned} ∂l∂Z,它可以表示成如下形式:
两向量之间的内积形式。- l ⃗ o \vec l^{o} lo
是l ⃗ \vec l l的单位向量结果。
∂ Z ∂ l ⃗ = f x ( x , y ) ⋅ cos α + f y ( x , y ) ⋅ cos β = [ f x ( x , y ) , f y ( x , y ) ] ( cos α cos β ) = ∇ f ( x , y ) ⋅ l ⃗ o \begin{aligned} \frac{\partial \mathcal Z}{\partial \vec l} & = f_x(x,y) \cdot \cos \alpha + f_y(x,y) \cdot \cos \beta \\ & = \left[f_x(x,y),f_y(x,y)\right] \begin{pmatrix} \cos \alpha \\ \cos \beta \end{pmatrix} \\ & = \nabla f(x,y) \cdot \vec l^{o} \end{aligned} ∂l∂Z=fx(x,y)⋅cosα+fy(x,y)⋅cosβ=[fx(x,y),fy(x,y)](cosαcosβ)=∇f(x,y)⋅lo
首先,由于 x , y x,y x,y轴描述的方向是确定的,因而在某点 ( x , y ) (x,y) (x,y)处的梯度向量也同样是固定的;但 l ⃗ o \vec l^{o} lo却不固定。由于是内积结果,我们可以将其展开:
∂ Z ∂ l ⃗ = ∇ f ( x , y ) ⋅ l ⃗ o = ∣ ∣ ∇ f ( x , y ) ∣ ∣ ⋅ ∣ ∣ l ⃗ o ∣ ∣ ⋅ cos θ \begin{aligned}\frac{\partial \mathcal Z}{\partial \vec l} & = \nabla f(x,y) \cdot \vec l^{o} \\ & = ||\nabla f(x,y)|| \cdot ||\vec l^{o}|| \cdot \cos \theta \end{aligned} ∂l∂Z=∇f(x,y)⋅lo=∣∣∇f(x,y)∣∣⋅∣∣lo∣∣⋅cosθ
观察:由于 ∣ ∣ ∇ f ( x , y ) ∣ ∣ = [ f x ( x , y ) ] 2 + [ f y ( x , y ) ] 2 ||\nabla f(x,y)|| = [f_x(x,y)]^2 + [f_y(x,y)]^2 ∣∣∇f(x,y)∣∣=[fx(x,y)]2+[fy(x,y)]2,因而在函数 f ( ⋅ ) f(\cdot) f(⋅)某一点 ( x , y ) (x,y) (x,y)确定的条件下,其值也是固定的;并且 ∣ ∣ l ⃗ o ∣ ∣ = 1 ||\vec l^{o}|| = 1 ∣∣lo∣∣=1。因此:影响 ∂ Z ∂ l ⃗ \begin{aligned}\frac{\partial \mathcal Z}{\partial \vec l}\end{aligned} ∂l∂Z大小的因素只有向量 ∇ f ( x , y ) \nabla f(x,y) ∇f(x,y)与向量 l ⃗ o \vec l^{o} lo之间的夹角 cos θ \cos \theta cosθ。
由于 cos θ ∈ [ − 1 , 1 ] \cos \theta \in [-1,1] cosθ∈[−1,1],因此当 θ = 0 \theta = 0 θ=0时,也就是 l ⃗ o \vec l^{o} lo与 ∇ f ( x , y ) \nabla f(x,y) ∇f(x,y)方向重合时,方向导数取得最大值,最大值即:
∂ Z ∂ l ⃗ = ∣ ∣ ∇ f ( x , y ) ∣ ∣ \frac{\partial \mathcal Z}{\partial \vec l} = ||\nabla f(x,y)|| ∂l∂Z=∣∣∇f(x,y)∣∣
也就是说:当前点 ( x , y ) (x,y) (x,y),选择梯度方向时,它的斜率(变化量)最大。
相关参考:
【多元微分专题】第六期:方向导数和梯度的直观理解
相关文章:
机器学习笔记之优化算法(十一)凸函数铺垫:梯度与方向导数
机器学习笔记之优化算法——凸函数铺垫:梯度与方向导数 引言回顾:偏导数方向余弦方向导数方向导数的几何意义方向导数的定义 方向导数与偏导数之间的关联关系证明过程 梯度 ( Gradient ) (\text{Gradient}) (Gradient) 引言 本节作为介绍凸函数的铺垫&a…...
探究Vue源码:mustache模板引擎(11) 递归处理循环逻辑并收尾算法处理
好 在上文 探究Vue源码:mustache模板引擎(10) 解决不能用连续点符号找到多层对象问题,为编译循环结构做铺垫 我们解决了js字符串没办法通过 什么点什么拿到对象中的值的问题 这个大家需要记住 因为这个方法的编写之前是当做面试题出现过的 那么 本文 我们就要去写上…...

STM32 CubeMX USB_CDC(USB_转串口)
STM32 CubeMX STM32 CubeMX 定时器(普通模式和PWM模式) STM32 CubeMX一、STM32 CubeMX 设置USB时钟设置USB使能UBS功能选择 二、代码部分添加代码实验效果 printf发…...
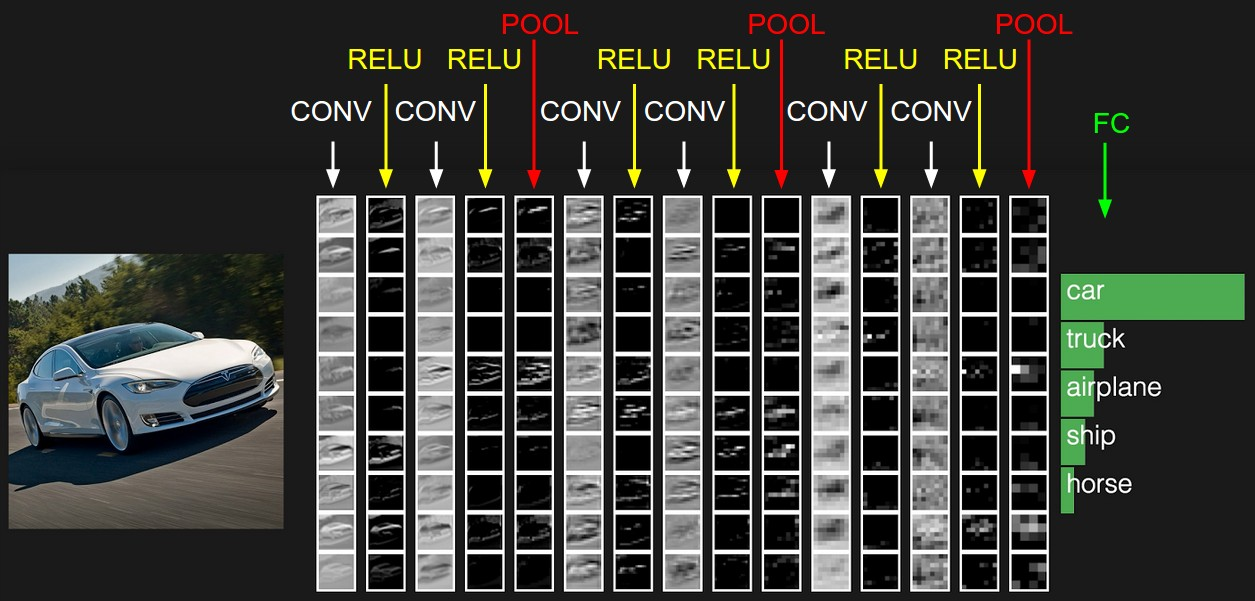
机器学习——卷积神经网络基础
卷积神经网络(Convolutional Neural Network:CNN) 卷积神经网络是人工神经网络的一种,是一种前馈神经网络。最早提出时的灵感来源于人类的神经元。 通俗来讲,其主要的操作就是:接受输入层的输入信息&…...
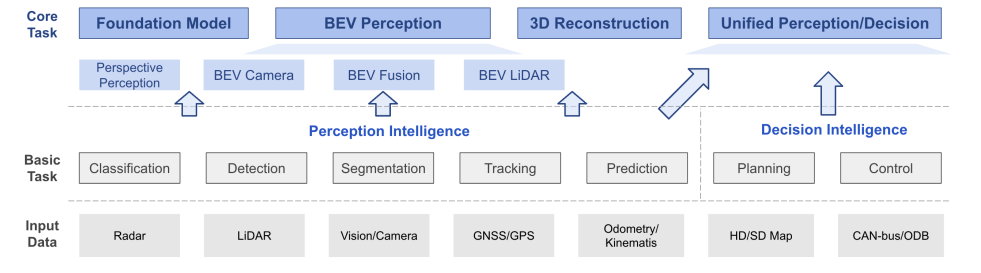
端到端自动驾驶前沿论文盘点(pdf+代码)
现在的自动驾驶,大多数还是采用的模块化架构,但这种架构的缺陷十分明显:在一个自动驾驶系统里,可能会包含很多个模型,每个模型都要专门进行训练、优化、迭代,随着模型的不断进化,参数量不断提高…...
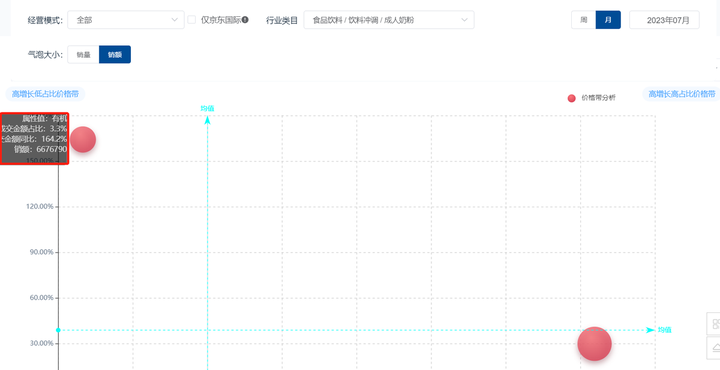
2023年中期奶粉行业分析报告(京东数据开放平台)
根据国家统计局和民政部数据公布,2022年中国结婚登记数创造了1980年(有数据公布)以来的历史新低,共计683.3万对。相较于2013年巅峰时期的数据,2022年全国结婚登记对数已接近“腰斩”。 2023年“520”期间的结婚登记数…...

web集群学习:基于CentOS 7构建 LVS-DR 群集并配置服务启动脚本
目录 1、环境准备 2、配置lvs服务启动脚本 1、在RS上分别配置服务启动脚本 2、在lvs director上配置服务启动脚本 3、客户端测试 配置LVS-DR模式主要注意的有 1、vip绑定在RS的lo接口; 2、RS做arp抑制; 1、环境准备 VIP192.168.95.10 RS1192.168…...

Flask 高级应用:使用蓝图模块化应用和 JWT 实现安全认证
本文将探讨 Flask 的两个高级特性:蓝图(Blueprints)和 JSON Web Token(JWT)认证。蓝图让我们可以将应用模块化,以便更好地组织代码;而 JWT 认证是现代 Web 应用中常见的一种安全机制。 一、使用…...
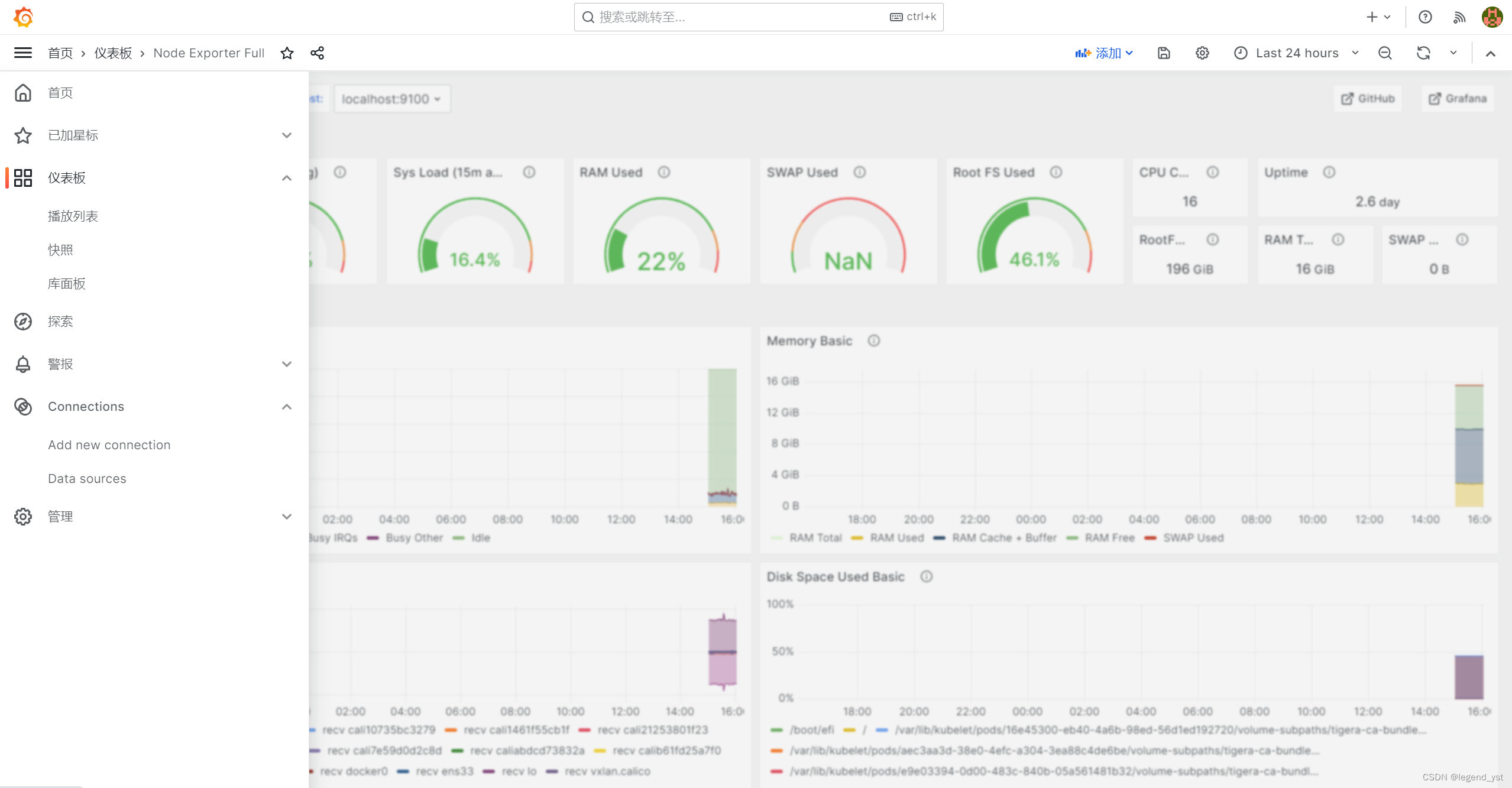
【Grafana】中文界面配置 v10.0.3
比如通过 docker run -d -p 3000:3000 -v /e/code/monitor/grafana/grafana.ini.txt:/etc/grafana/grafana.ini grafana/grafana运行一个容器(最新是v10.0.3)。 在 /admin/settings 可以看到 users 部分有一个 default_language 配置。 所以在挂载到 …...

web前端html
文章目录 快捷方式一、html5的声明二、html5基本骨架 2.1 html标签 2.2 head标签 2.3 body和head同级 2.4 body标签 2.5 title标签 2.6 meta标签 三、标题标签介绍与应用 3.1 标题的介绍 3.2 标题标签位置摆放 3.3 标签之段落、换行、水平线 3.3 标签之图片 3.3.1 图…...
Unity 编辑器选择器工具类Selection 常用函数和用法
Unity 编辑器选择器工具类Selection 常用函数和用法 点击封面跳转下载页面 简介 在Unity中,Selection类是一个非常有用的工具类,它提供了许多函数和属性,用于操作和管理编辑器中的选择对象。本文将介绍Selection类的常用函数和用法ÿ…...
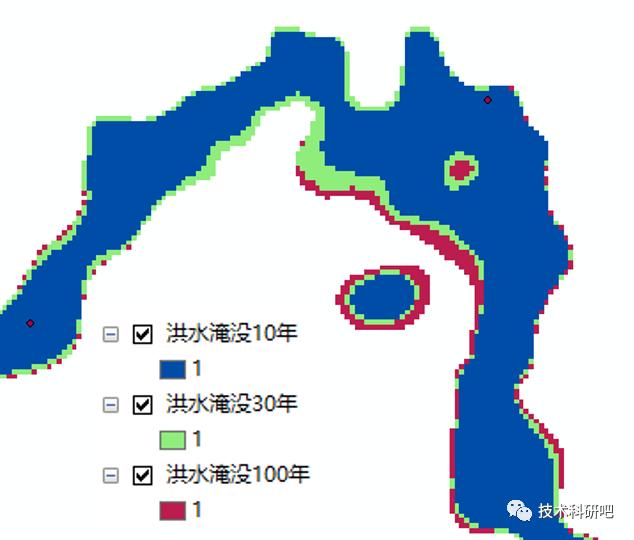
ArcGIS在洪水灾害普查、风险评估及淹没制图中应用教程
详情点击链接:ArcGIS在洪水灾害普查、风险评估及淹没制图中应用教程 一:洪水普查技术规范 1.1 全国水旱灾害风险普查实施方案 1.2 洪水风险区划及防治区划编制技术要求 1.3 山丘区中小河流洪水淹没图编制技术要求 二:ArcGIS及数据管理 …...

Oracle日志相关操作
1.归档日志设置 # 切换账号 $ su - oracle# 登录oracle的sys账户 $ sqlplus / as sysdbasql> archive log list; #查看是不是归档方式 SQL> archive log list; Database log mode Archive Mode Automatic archival Enabled Archive destin…...
IMV8.0
一、背景内容 经历了多个版本,基础内容在前面,可以使用之前的基础环境: v1: https://blog.csdn.net/wtt234/article/details/132139454 v2: https://blog.csdn.net/wtt234/article/details/132144907 v3: h…...

【Linux 网络】 数据链路层协议
数据链路层协议 数据链路层解决的问题以太网协议认识以太网以太网帧格式 认识MAC地址对比理解MAC地址和IP地址认识MTUMTU对IP协议的影响MTU对UDP协议的影响MTU对于TCP协议的影响ARP协议ARP协议的作用ARP协议的工作流程ARP数据报的格式 总结 数据链路层解决的问题 IP拥有将数据跨…...
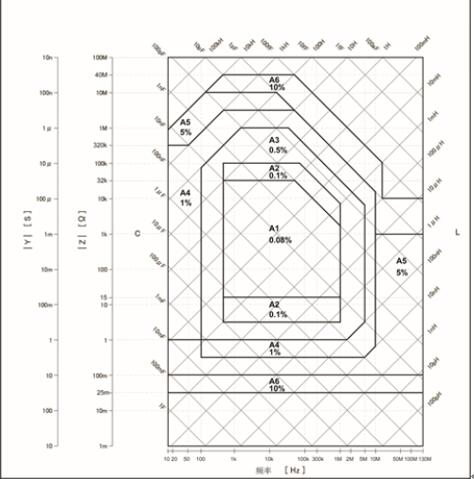
GWJDN-400型2MHZ自动平衡高温介电温谱仪
GWJDN-400型2MHZ自动平衡高温介电温谱仪 GWJDN-400型2MHZ自动平衡高温介电温谱仪 关键词:介电常数,高温介电,自动平衡 主要功能: 材料介电常数测试仪 半导体材料的介电常数、导电率和C-V特性液晶材料:液晶单元的介电常数、弹性…...

第十五次CCF计算机软件能力认证
第一题:小明上学 小明是汉东省政法大学附属中学的一名学生,他每天都要骑自行车往返于家和学校。 为了能尽可能充足地睡眠,他希望能够预计自己上学所需要的时间。 他上学需要经过数段道路,相邻两段道路之间设有至多一盏红绿灯。 京…...

ThreadPoolExecutor线程池详解
ThreadPoolExecutor线程池详解 1. 背景 项目最近的迭代中使用到了ThreadPoolExecutor线程池,之前都只是知道怎么用,没有了解过线程池的底层原理,项目刚上线,有时间整理一下线程池的用法,学习一下线程池的底层实现与工…...
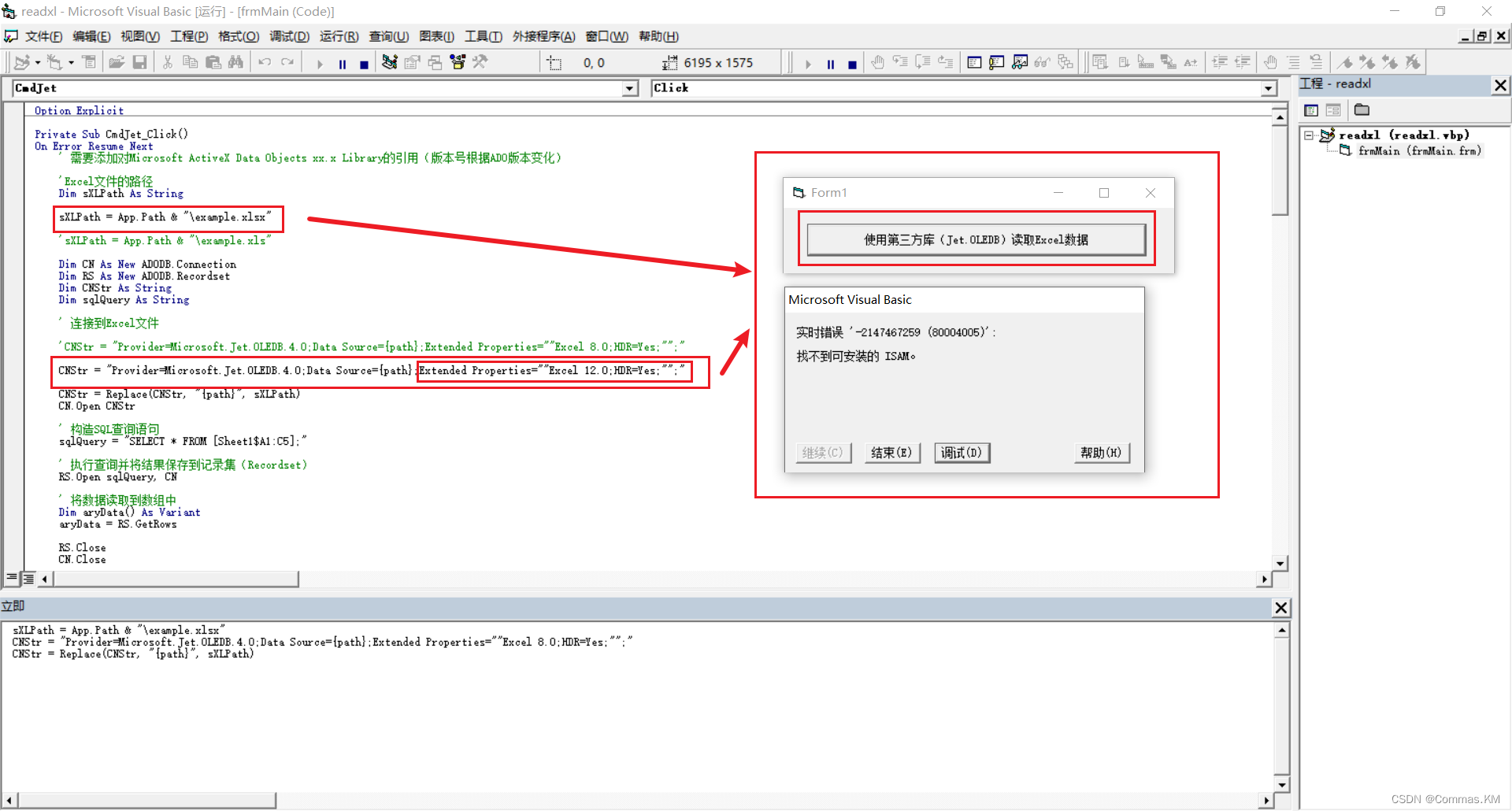
【VB6|第22期】用SQL的方式读取Excel数据
日期:2023年8月7日 作者:Commas 签名:(ง •_•)ง 积跬步以致千里,积小流以成江海…… 注释:如果您觉得有所帮助,帮忙点个赞,也可以关注我,我们一起成长;如果有不对的地方ÿ…...
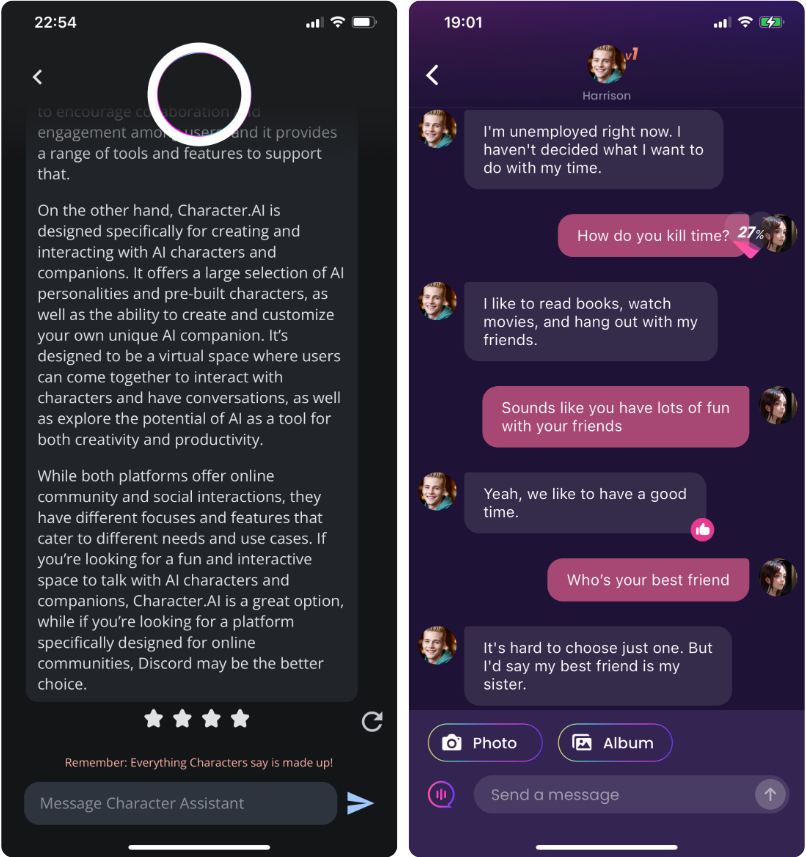
融云:从「对话框」跳进魔法世界,AIGC 带给社交的新范式
8 月 17 日(周四),融云将带来直播课-《北极星如何协助开发者排查问题与预警风险?》欢迎点击上方报名~ AIGC 与社交结合的应用主要分两种,一是发乎于 AIGC,以大模型为基础提供虚拟伴侣等服务的 Appÿ…...

Potree 点云可视化实战指南:从基础配置到高级测量技巧
1. Potree点云可视化入门指南 第一次接触Potree时,我被它处理海量点云数据的能力震撼到了。这个基于WebGL的开源库,能让普通浏览器流畅渲染上亿级别的点云数据。想象一下,不用安装专业软件,打开网页就能查看精细的激光扫描模型&am…...

Go Routine 调度可视化分析
Go Routine调度可视化分析:揭开并发调度的神秘面纱 在Go语言中,Goroutine以其轻量级和高并发的特性成为开发者处理多任务的首选工具。Goroutine的调度机制对许多开发者来说仍然是一个“黑箱”,尤其是在高并发场景下,如何高效管理…...

在线PPT工具哪个最方便快捷?6款主流工具实测,新手也能快速出片
作为AI博主,日常要产出AI工具实测、智能创作干货、高效办公教程,对在线PPT工具的核心需求远超基础编辑——全端适配、AI生成专业、安全合规、资源充足,无需复杂操作,既能依托AI快速生成高质量内容,又能兼顾多场景使用与…...

掌握5个核心配置技巧:OpenCore-Configurator从入门到专家
掌握5个核心配置技巧:OpenCore-Configurator从入门到专家 【免费下载链接】OpenCore-Configurator A configurator for the OpenCore Bootloader 项目地址: https://gitcode.com/gh_mirrors/op/OpenCore-Configurator OpenCore-Configurator(简称…...

嵌入式开发必备:三大代码对比工具深度评测
1. 代码对比工具概述作为一名嵌入式开发工程师,我每天都要处理大量的代码修改和版本对比工作。在多年的开发实践中,我发现选择合适的代码对比工具能极大提升工作效率。虽然Beyond Compare是业内公认的标杆产品,但实际工作中我们还有更多选择&…...

LFM2.5-1.2B-Thinking-GGUF入门必看:轻量模型在离线环境中的安全合规部署
LFM2.5-1.2B-Thinking-GGUF入门必看:轻量模型在离线环境中的安全合规部署 1. 模型概述 LFM2.5-1.2B-Thinking-GGUF是Liquid AI推出的轻量级文本生成模型,专为低资源环境设计。这个1.2B参数的模型采用GGUF格式,能够在各种边缘设备上高效运行…...
)
RT-Thread PM组件实战:手把手教你为STM32L4移植低功耗驱动(含RTC时间补偿)
RT-Thread PM组件深度实战:STM32L4低功耗移植与RTC时间补偿全解析 1. 低功耗设计的工程挑战与解决方案 在电池供电的嵌入式设备开发中,我们常常面临一个核心矛盾:如何平衡系统性能与能耗。以智能水表为例,常规模式下MCU工作电流可…...

Enformer深度学习模型:基因序列预测的混合架构革命
Enformer深度学习模型:基因序列预测的混合架构革命 【免费下载链接】enformer-pytorch Implementation of Enformer, Deepminds attention network for predicting gene expression, in Pytorch 项目地址: https://gitcode.com/gh_mirrors/en/enformer-pytorch …...

United VARs CoE创享会重回上海,全球伙伴共议AI时代云ERP演进
时隔七年,United VARs Cloud ERP CoE 创享会再次回到中国!3月10日至12日,由Acloudear司享承办的United VARs Cloud ERP CoE 创享会在上海举行。来自全球多家United VARs成员机构及SAP的专家与管理者齐聚上海,围绕 Cloud ERP 战略、…...
支持论文格式自动排版与LaTeX模板智能匹配)
AI论文生成平台推荐:7款高效工具(含爱毕业aibiye)支持论文格式自动排版与LaTeX模板智能匹配
工具快速对比排名(前7推荐) 工具名称 核心功能亮点 处理时间 适配平台 aibiye 学生/编辑双模式降AIGC 1分钟 知网、万方等 aicheck AI痕迹精准弱化查重一体 ~20分钟 知网、格子达、维普 askpaper AIGC率个位数优化 ~20分钟 高校检测规则通…...