不同路径1、2、3合集(980. 不同路径 III)
不同路径一
矩形格,左上角 到 右下角。
class Solution {int [] directX = new int[]{-1,1,0,0};int [] directY = new int[]{0,0,-1,1};int rows;int cols;public int uniquePathsIII(int[][] grid) {if (grid == null || grid.length == 0 || grid[0].length == 0) {return 0;}// dfs + 回溯int startX = 0;int startY = 0;int stepNeed = 1;rows = grid.length;cols = grid[0].length;for (int i = 0; i < rows; i++) {for (int j = 0; j < cols; j++) {if (grid[i][j] == 1){startX = i;startY = j;continue;}if (grid[i][j] == 0) stepNeed ++;}}return dfs(startX,startY,stepNeed,grid);}private int dfs(int x, int y, int stepNeed, int[][] grid) {// terminalif (grid[x][y] == -1) return 0;if (grid[x][y] == 2) return stepNeed == 0 ? 1 : 0;// process logic and drill downgrid[x][y] = -1;int count = 0;for (int i = 0; i < 4; i++) {int newX = x + directX[i];int newY = y + directY[i];if (newX < 0 || newX >= rows || newY < 0 || newY >= cols) continue;count += dfs(newX,newY,stepNeed - 1,grid);}// reversegrid[x][y] = 0;return count;}}不同路径二
不同路径三
相关文章:
)
不同路径1、2、3合集(980. 不同路径 III)
不同路径一 矩形格,左上角 到 右下角。 class Solution {int [] directX new int[]{-1,1,0,0};int [] directY new int[]{0,0,-1,1};int rows;int cols;public int uniquePathsIII(int[][] grid) {if (grid null || grid.length 0 || grid[0].length 0) {ret…...

【云原生】Yaml文件详解
目录 一、YAML 语法格式1.1查看 api 资源版本标签1.2 写一个yaml文件demo1.3 详解k8s中的port 一、YAML 语法格式 Kubernetes 支持 YAML 和 JSON 格式管理资源对象JSON 格式:主要用于 api 接口之间消息的传递YAML格式:用于配置和管理,YAML 是…...

ffmpeg下载安装教程
ffmpeg官网下载地址https://ffmpeg.org/download.html 这里以windows为例,鼠标悬浮到windows图标上,再点击 Windows builds from gyan.dev 或者直接打开 https://www.gyan.dev/ffmpeg/builds/ 下载根据个人需要下载对应版本 解压下载的文件,并复制bin所在目录 新打开一个命令…...
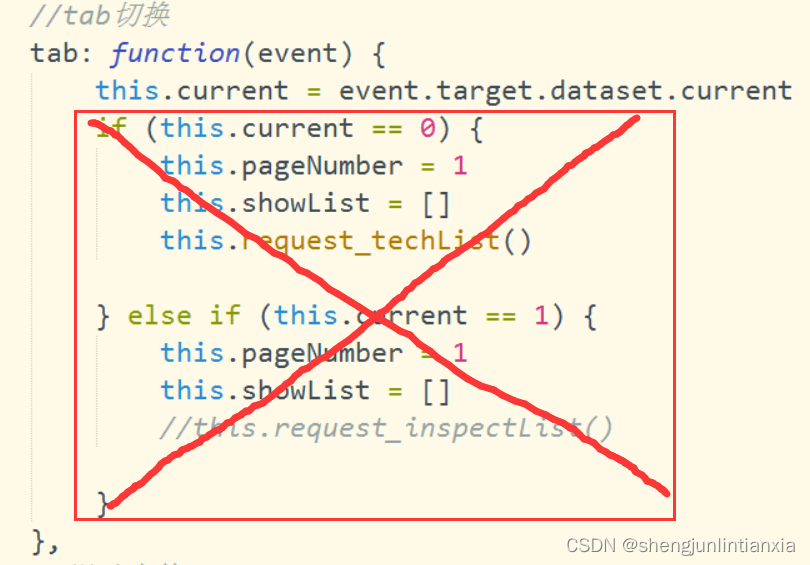
uniapp之当你问起“tab方法触发时eventchange也跟着触发了咋办”时
我相信没有大佬会在这个问题上卡两个小时吧,记下来大家就当看个乐子了。 当时问题就是,点击tab头切换的时候,作为tab滑动事件的eventchange同时触发了,使得接口请求了两次 大概是没睡好,我当时脑子老想着怎么阻止它冒…...
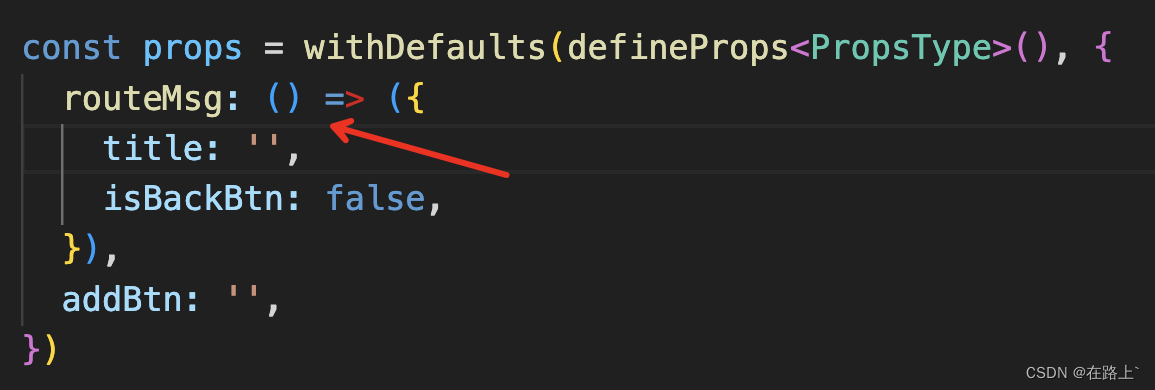
TS 踩坑之路(四)之 Vue3
一、在使用定义默认值withDefaults和defineProps 组合时,默认值设置报错 代码案例 报错信息 不能将类型“{ isBackBtn: false; }”分配给类型“(props: PropsType) > RouteMsgType”。 对象字面量只能指定已知属性,并且“isBackBtn”不在类型“(pro…...
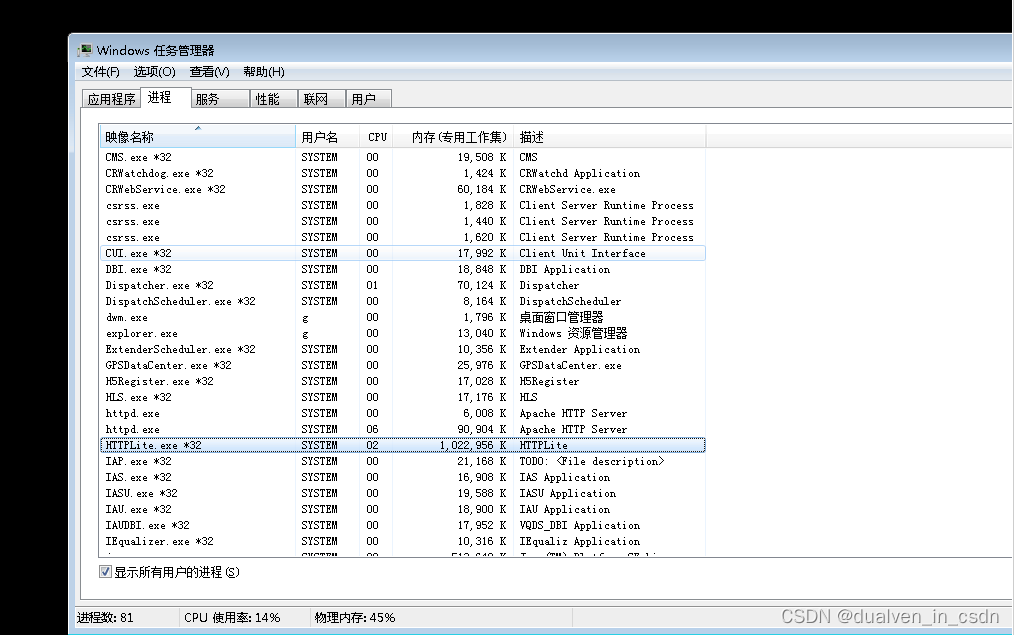
【音视频】edge与chrome在性能上的比较
目录 结论先说 实验 结论 实验机器的cpu配置 用EDGE拉九路编辑 google拉五路就拉不出来了 资源使用情况 edge报错编辑 如果服务器端 性能也满 了,就会不回复;验证方式 手动敲 8081,不回应。 结论先说 实验 用chrome先拉九路&#…...
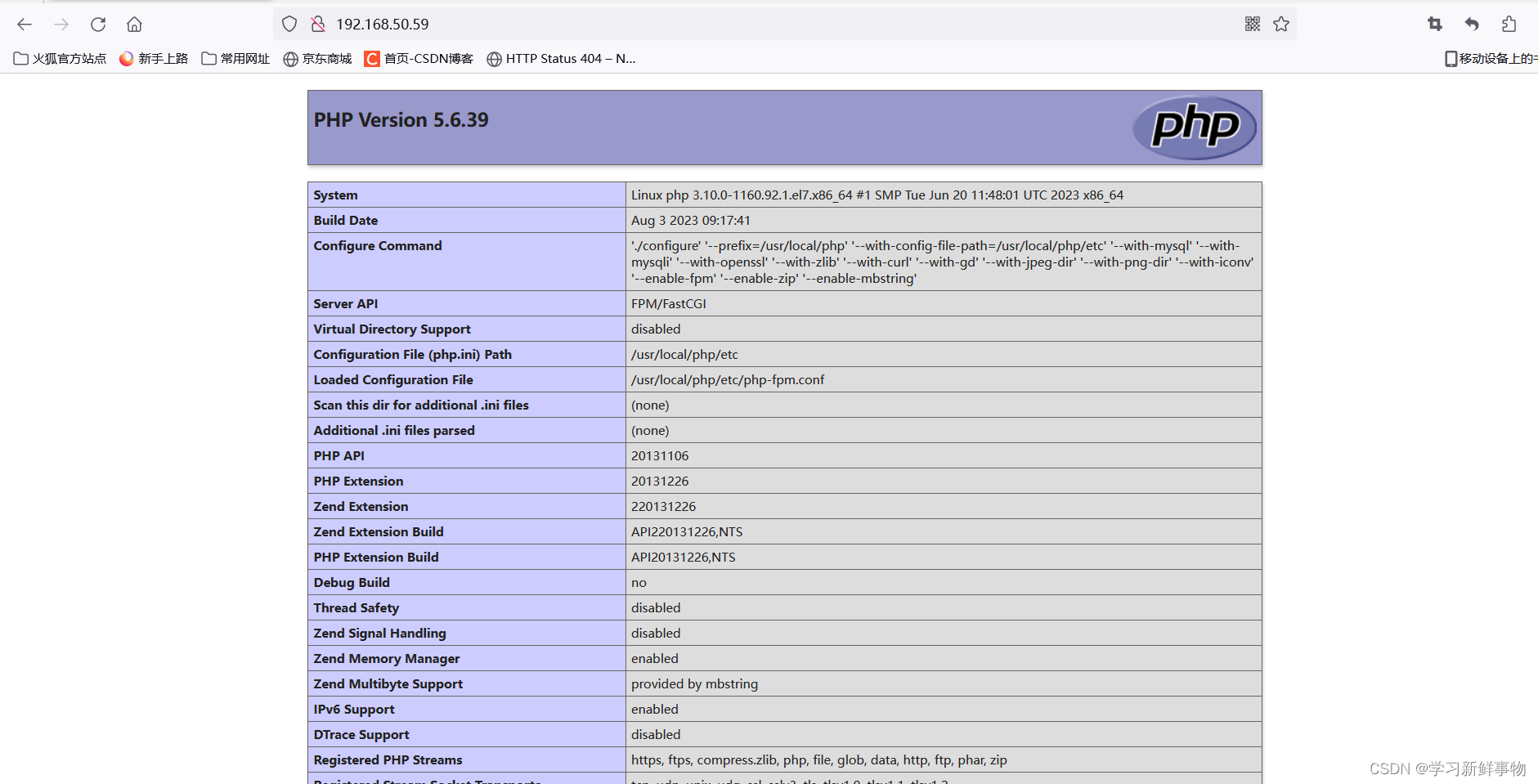
Docker Compose编排部署LNMP服务
目录 安装docker-ce 阿里云镜像加速器 文件 启动 安装docker-ce [rootlocalhost ~]# wget -O /etc/yum.repos.d/CentOS-Base.repo http://mirrors.aliyun.com/repo/Centos-7.repo --2023-08-03 18:34:32-- http://mirrors.aliyun.com/repo/Centos-7.repo 正在解析主机 m…...

git使用(常见用法)
一.下载git git官方下载跳转 安装简单,有手就行 二. git的简单使用 1. 连接远程仓库 #初始化 git init #配置账户 git config --global user.name “输入你的用户名” git config --global user.email “输入你的邮箱” git config --list #--q退出 #配置验证邮箱 ssh-key…...

用例拆分情况考虑方案
文章目录 1、方案一方案概述方案分析(1) 把对应图商地图的逻辑给分离开(2) 要使用命令行的方式执行方法 2、方案二3、最终决定 1、方案一 方案概述 每个图商(GD、BD、自建)拆分成单独的类 把参数化的几个图商类别拆分成对应的图商类,在每个类…...

一文搞懂IS-IS报文通用格式
报文格式 IS-IS报文是直接封装在数据链路层的帧结构中的。PDU可以分为两个部分,报文头和变长字段部分。其中头部又可分为通用头部和专用头部。对于所有PDU来说,通用报头都是相同的,但专用报头根据PDU类型不同而有所差别。 IS-IS的PDU有4种类…...

位置参数 关键字参数
在Python中,函数参数可以按照位置或关键字来传递。这导致了两种主要的参数类型:位置参数和关键字参数。 位置参数: 这是最常见的参数类型,当我们调用函数时,传递给函数的参数值是按照它们的位置来确定的。例如,def fun…...

【果树农药喷洒机器人】Part5:基于深度相机与分割掩膜的果树冠层体积探测方法
文章目录 一、引言二、树冠体积测量对比方法2.1冠层体积人工测量法2.2冠层体积拟合测量法 三、基于深度相机与分割掩膜探测树冠体积方法3.1像素值与深度值的转换3.2树冠体积视觉探测法3.3实验分析 总结 一、引言 果树靶标探测是实现农药精准喷施的关键环节,本章以果…...
生活小妙招之UE custom Decal
因为这几年大部分时间都在搞美术,所以博客相关的可能会鸽的比较多,阿巴阿巴 https://twitter.com/Tuatara_Games/status/1674034744084905986 之前正好看到一个贴花相关的小技巧,正好做一个记录,也在这个的基础上做一些小的拓展…...

DAY02_Spring—第三方资源配置管理Spring容器Spring注解开发Spring整合Mybatis和Junit
目录 一 第三方资源配置管理1 管理DataSource连接池对象问题导入1.1 管理Druid连接池1.2 管理c3p0连接池 2 加载properties属性文件问题导入2.1 基本用法2.2 配置不加载系统属性2.3 加载properties文件写法 二 Spring容器1 Spring核心容器介绍问题导入1.1 创建容器1.2 获取bean…...

Icon图标有哪些在线设计的工具推荐
虽然icon图标相对较小,但icon图标在设计中非常重要。高质量的icon图标通常可以决定设计工作的质量。高质量的在线生产icon工具可以提高设计师图标设计的效率。此外,优秀的图标设计师还可以让设计师快速开始图标设计工作。本文为您选择了五种在线生成icon…...

深度学习环境安装依赖时常见错误解决
1.pydantic 安装pydantic时报以下错误: ImportError: cannot import name Annotated from pydantic.typing (C:\Users\duole\anaconda3\envs\vrh\lib\site-packages\pydantic\typing.py) 这个是版本错误,删除装好的版本,重新指定版本安装就…...
opencv基础47 查找图像轮廓cv2.findContours()详解
什么是图像轮廓? 图像轮廓是指图像中物体边缘的连续性曲线。在计算机视觉和图像处理中,轮廓通常被用于检测物体、分割图像以及提取物体特征。 图像轮廓是由一系列连续的像素点组成,这些像素点位于物体边界上。轮廓的特点是在物体和背景之间的…...
Splunk Enterprise for mac(可视化数据分析软件)详细安装教程
Splunk Enterprise for Mac是一款可视化数据分析软件,为你提供强大的搜索、 分析和可视化功能,可以帮助您获得有价值的业务情报,从你机器生成的数据。还在等什么?有需要的朋友,欢迎前来下载! 实时监测和搜…...

如何实现环卫项目运营的数字化管理,达到企业降本增效的目的?
数字环卫是指利用数字技术和数据驱动的方法来改善环卫流程和管理。数字环卫的底层逻辑在于利用技术来优化运营、提高效率并降低环卫项目管理成本。如何实现环卫工程运营数字化管理,达到降本增效的目标: 1.数据收集和分析:实施数据收集机制&a…...
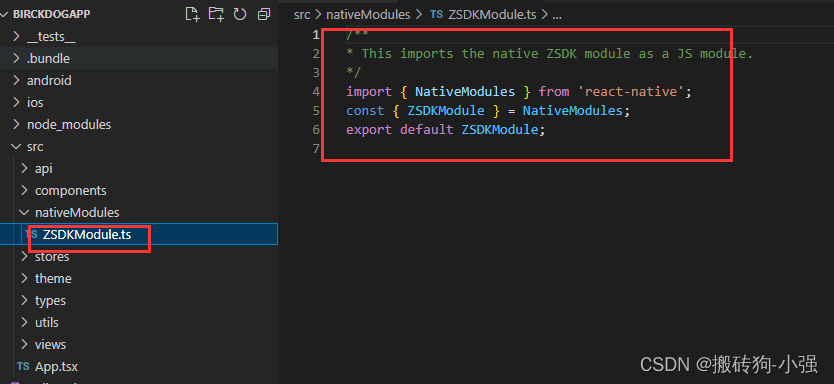
React Native连接Zebra斑马打印机通过发送CPCL指令打印(Android 和 iOS通用)
自 2015 年发布以来,React Native 已成为用于构建数千个移动应用程序的流行跨平台移动开发框架之一。通常,我们有开发人员询问如何将 Link-OS SDK 与 React Native 应用程序集成,以便在 Zebra 打印机上打印标签。在本教程中,我们将…...

实在Agent如何破解成本分析报告编制耗时耗力与数据滞后?企业架构师的避坑指南
摘要:在2026年的今天,尽管AI技术已深度普及,但许多企业的财务与运营部门仍深陷“数据泥潭”。传统的成本分析报告编制依赖于大量的人工导数、Excel汇总及跨系统搬运,导致报告产出即滞后,严重误导决策。作为一名深耕行业…...

LIKWID标记API深度解析:精确测量代码性能
LIKWID标记API深度解析:精确测量代码性能 【免费下载链接】likwid Performance monitoring and benchmarking suite 项目地址: https://gitcode.com/gh_mirrors/li/likwid LIKWID是一款功能强大的性能监控和基准测试套件,其标记API(Ma…...

C++内存可视化利器:silicondawn/memory-viewer库实战指南
1. 项目概述与核心价值最近在调试一个涉及复杂内存操作的C项目时,我又一次陷入了“内存黑盒”的困境。指针指向的数据结构到底对不对?序列化后的字节流里某个字段的值是不是我预期的?手动printf或者断点查看十六进制,效率低不说&a…...

Visual C++运行库终极修复指南:一键解决“缺少DLL文件“的完整解决方案
Visual C运行库终极修复指南:一键解决"缺少DLL文件"的完整解决方案 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经在打开某个软…...

RISC-V SoC上DNN加速的内存优化与FTL算法实践
1. RISC-V SoC上的DNN加速内存优化挑战在边缘计算场景下,深度神经网络(DNN)的部署面临严峻的内存带宽挑战。典型的RISC-V异构SoC(如Siracusa)采用多级软件管理内存架构,包含L1紧耦合存储器(32KB)、L2共享缓…...

猫眼启发的亚太赫兹超表面成像系统设计与应用
1. 猫眼启发的亚太赫兹超表面成像系统概述在电磁波成像技术领域,传统系统往往面临视场匹配困难、系统冗余度高以及实时性不足等挑战。受猫眼结构中反光膜(tapetum lucidum)的生物学启发,我们开发了一种创新的主动-被动复合孔径共享…...

Go语言装饰器模式:功能扩展
Go语言装饰器模式:功能扩展 1. 装饰器实现 type Component interface {Operation() string }type ConcreteComponent struct{}func (c *ConcreteComponent) Operation() string {return "ConcreteComponent" }type Decorator struct {component Component…...

英伟达收购SwiftStack:AI时代从算力到数据管道的战略布局
1. 项目概述:一次战略收购的深度拆解最近在梳理科技巨头的战略动向时,一个几年前的老新闻——“英伟达收购SwiftStack”——重新进入了我的视野。乍一看,这似乎只是一次普通的商业并购,一个做GPU的巨头买下了一家名不见经传的软件…...

OpenCore Legacy Patcher终极指南:让老Mac焕发新生的4个简单步骤
OpenCore Legacy Patcher终极指南:让老Mac焕发新生的4个简单步骤 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 还在为你的老Mac无法升级最新mac…...

GIS国土工具实战:从地类分析到坐标转换,一站式解决项目难题
1. GIS国土工具如何解决项目痛点 第一次接触国土整治项目时,我被各种数据格式搞得焦头烂额。早上9点收到甲方发来的50个地块的shp文件,下午3点就要提交带坐标的txt报备文件,中间还要做地类分析和影像核对。手动操作?光是想到要一个…...