28 玻尔兹曼机
文章目录
- 28 玻尔兹曼机
- 28.1 模型定义
- 28.2 梯度推导
- 28.3 梯度上升
- 28.4 基于VI[平均场理论]求解后验概率
28 玻尔兹曼机
28.1 模型定义
玻尔兹曼机是一张无向图,其中的隐节点和观测节点可以有任意连接如下图:
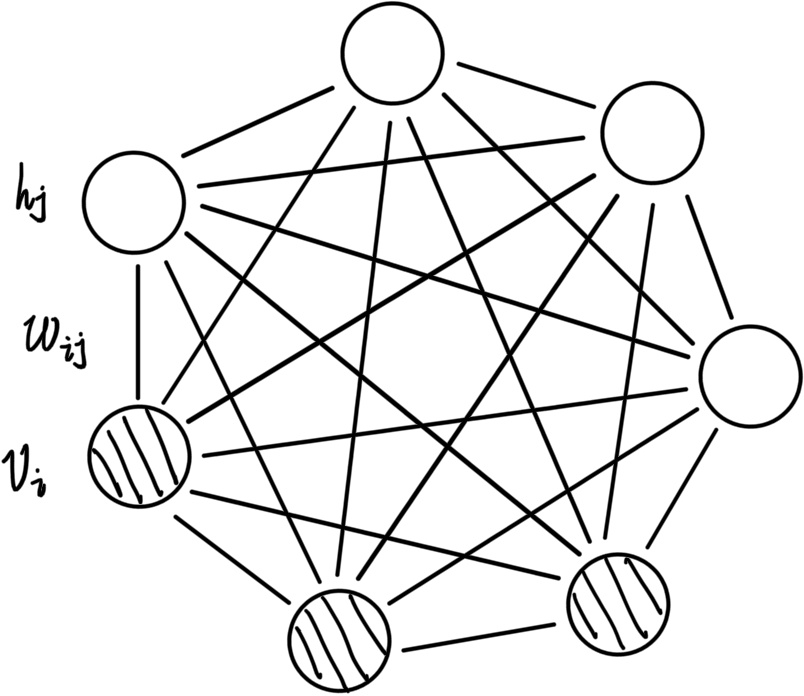
我们给其中的节点、连线做出一些定义:
- 节点:观测节点 V = { 0 , 1 } D V = {\lbrace 0, 1 \rbrace}^D V={0,1}D,隐节点 H = { 0 , 1 } P H = {\lbrace 0, 1 \rbrace}^P H={0,1}P
- 连线:观测节点之间 L = [ L i j ] D × D L = [L_{ij}]_{D \times D} L=[Lij]D×D,隐节点之间 J = [ J i j ] P × P J = [J_{ij}]_{P \times P} J=[Jij]P×P,观测节点与隐节点之间 W = [ W i j ] D × P W = [W_{ij}]_{D \times P} W=[Wij]D×P
- 参数: θ = { W , L , J } \theta = {\lbrace W, L, J \rbrace} θ={W,L,J}
则我们可以根据上面的定义,加上无向图能量方程的性质得到公式:
{ P ( V ∣ H ) = 1 z e x p − E ( V , H ) E ( V , H ) = − ( V T W H + 1 2 V T L V + 1 2 H T J H ⏟ 矩阵对称,参数除 2 ) \begin{cases} P(V|H) = \frac{1}{z} exp{-E(V, H)} \\ E(V, H) = -( {V^T W H} + \underbrace{\frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H}}_{矩阵对称,参数除2} ) \end{cases} ⎩ ⎨ ⎧P(V∣H)=z1exp−E(V,H)E(V,H)=−(VTWH+矩阵对称,参数除2 21VTLV+21HTJH)
28.2 梯度推导
我们的目标函数就是 P ( V ) P(V) P(V),所以可以讲log-likelihood写作: 1 N ∑ v ∈ V log P ( v ) \frac{1}{N} \sum_{v \in V} \log P(v) N1∑v∈VlogP(v),并且 ∣ V ∣ = N |V| = N ∣V∣=N。所以我们可以将他的梯度写为 1 N ∑ v ∈ V ∇ θ log P ( v ) \frac{1}{N} \sum_{v \in V} \nabla_\theta \log P(v) N1∑v∈V∇θlogP(v)。其中 ∇ θ log P ( v ) \nabla_\theta \log P(v) ∇θlogP(v)的推导在24-直面配分函数的RBM-Learning问题中已经推导过了,可以得到:
∇ θ log P ( v ) = ∑ v ∑ H P ( v , H ) ⋅ ∇ θ E ( v , H ) − ∑ H P ( H ∣ v ) ⋅ ∇ θ E ( v , H ) \nabla_\theta \log P(v) = \sum_v \sum_H P(v, H) \cdot \nabla_\theta E(v, H) - \sum_H P(H| v) \cdot \nabla_\theta E(v, H) ∇θlogP(v)=v∑H∑P(v,H)⋅∇θE(v,H)−H∑P(H∣v)⋅∇θE(v,H)
我们对E(v, H)求其中一个参数的导的结果很容易求,所以可以将公式写作:
∇ w log P ( v ) = ∑ v ∑ H P ( v , H ) ⋅ ( − V H T ) − ∑ H P ( H ∣ v ) ⋅ ( − V H T ) = ∑ H P ( H ∣ v ) ⋅ V H T − ∑ v ∑ H P ( v , H ) ⋅ V H T \begin{align} \nabla_w \log P(v) &= \sum_v \sum_H P(v, H) \cdot (- V H^T) - \sum_H P(H| v) \cdot (- V H^T) \\ &= \sum_H P(H| v) \cdot V H^T - \sum_v \sum_H P(v, H) \cdot V H^T \end{align} ∇wlogP(v)=v∑H∑P(v,H)⋅(−VHT)−H∑P(H∣v)⋅(−VHT)=H∑P(H∣v)⋅VHT−v∑H∑P(v,H)⋅VHT
将其带入原式可得:
∇ w L = 1 N ∑ v ∈ V ∇ θ log P ( v ) = 1 N ∑ v ∈ V ∑ H P ( H ∣ v ) ⋅ V H T − 1 N ∑ v ∈ V ⏟ 1 N × N ∑ v ∑ H P ( v , H ) ⋅ V H T = 1 N ∑ v ∈ V ∑ H P ( H ∣ v ) ⋅ V H T − ∑ v ∑ H P ( v , H ) ⋅ V H T \begin{align} \nabla_w {\mathcal L} &= \frac{1}{N} \sum_{v \in V} \nabla_\theta \log P(v) \\ &= \frac{1}{N} \sum_{v \in V} \sum_H P(H| v) \cdot V H^T - \underbrace{\frac{1}{N} \sum_{v \in V}}_{\frac{1}{N} \times N} \sum_v \sum_H P(v, H) \cdot V H^T \\ &= \frac{1}{N} \sum_{v \in V} \sum_H P(H| v) \cdot V H^T - \sum_v \sum_H P(v, H) \cdot V H^T \\ \end{align} ∇wL=N1v∈V∑∇θlogP(v)=N1v∈V∑H∑P(H∣v)⋅VHT−N1×N N1v∈V∑v∑H∑P(v,H)⋅VHT=N1v∈V∑H∑P(H∣v)⋅VHT−v∑H∑P(v,H)⋅VHT
我们用 P d a t a P_{data} Pdata表示 P d a t a ( v , H ) = P d a t a ( v ) ⋅ P m o d e l ( H ∣ v ) P_{data}(v, H) = P_{data}(v) \cdot P_{model}(H| v) Pdata(v,H)=Pdata(v)⋅Pmodel(H∣v), P m o d e l P_{model} Pmodel表示 P m o d e l ( v , H ) P_{model}(v, H) Pmodel(v,H),则可以将公式再转化为:
∇ w L = E P d a t a [ V H T ] − E P m o d e l [ V H T ] \begin{align} \nabla_w {\mathcal L} &= E_{P_{data}} \left[ V H^T \right] - E_{P_{model}} \left[ V H^T \right] \end{align} ∇wL=EPdata[VHT]−EPmodel[VHT]
28.3 梯度上升
给三个参数分别写出他们的变化量(系数 × \times ×梯度):
{ Δ W = α ( E P d a t a [ V H T ] − E P m o d e l [ V H T ] ) Δ L = α ( E P d a t a [ V V T ] − E P m o d e l [ V V T ] ) Δ J = α ( E P d a t a [ H H T ] − E P m o d e l [ H H T ] ) \begin{cases} \Delta W = \alpha (E_{P_{data}} \left[ V H^T \right] - E_{P_{model}} \left[ V H^T \right]) \\ \Delta L = \alpha (E_{P_{data}} \left[ V V^T \right] - E_{P_{model}} \left[ V V^T \right]) \\ \Delta J = \alpha (E_{P_{data}} \left[ H H^T \right] - E_{P_{model}} \left[ H H^T \right]) \\ \end{cases} ⎩ ⎨ ⎧ΔW=α(EPdata[VHT]−EPmodel[VHT])ΔL=α(EPdata[VVT]−EPmodel[VVT])ΔJ=α(EPdata[HHT]−EPmodel[HHT])
这是用于表示在一次梯度上升中参数的改变量,由于 W , L , J W,L,J W,L,J是矩阵,将他们拆的更细可以写作:
Δ w i j = α ( E P d a t a [ v i h j ] ⏟ positive phase − E P m o d e l [ v i h j ] ⏟ negative phase ) \Delta w_{ij} = \alpha ( \underbrace{E_{P_{data}} \left[ v_i h_j \right]}_{\text{positive phase}} - \underbrace{E_{P_{model}} \left[ v_i h_j \right]}_{\text{negative phase}} ) Δwij=α(positive phase EPdata[vihj]−negative phase EPmodel[vihj])
但是这两项都很难求,因为要用到 P m o d e l P_{model} Pmodel,如果要得到 P m o d e l P_{model} Pmodel则要采用MCMC的方法,但对一个这样的图进行MCMC非常的消耗时间(不过这也给我们提供了一个解题思路)。
具体要用到MCMC的话,我们必须要有每一个维度的后验,所以我们根据复杂的推导(下面证明)可以得到每一个维度的后验——在固定其他维度求这一个维度的情况:
{ P ( v i = 1 ∣ H , V − i ) = σ ( ∑ j = 1 P w i j h j + ∑ k = 1 , − i D L i k v k ) P ( h j = 1 ∣ V , H − j ) = σ ( ∑ i = 1 P w i j v i + ∑ m = 1 , − i D J j m h m ) \begin{cases} P(v_i = 1|H, V_{-i}) = \sigma(\sum_{j=1}^P w_{ij} h_j + \sum_{k=1,-i}^D L_{ik} v_k) \\ P(h_j = 1|V, H_{-j}) = \sigma(\sum_{i=1}^P w_{ij} v_i + \sum_{m=1,-i}^D J_{jm} h_m) \\ \end{cases} {P(vi=1∣H,V−i)=σ(∑j=1Pwijhj+∑k=1,−iDLikvk)P(hj=1∣V,H−j)=σ(∑i=1Pwijvi+∑m=1,−iDJjmhm)
这个公式我们可以发现在RBM情况下也是符合RBM后验公式的。
接下来我们证明一下上面这个公式,下文验证 P ( v i ∣ H , V − i ) P(v_i|H, V_{-i}) P(vi∣H,V−i)的情况, P ( h j ∣ V , H − j ) P(h_j|V, H_{-j}) P(hj∣V,H−j)可以类比。首先对其进行变换:
P ( v i ∣ H , V − i ) = P ( H , V ) P ( H , V − i ) = 1 Z exp { − E [ V , H ] } ∑ v i 1 Z exp { − E [ V , H ] } = 1 Z exp { V T W H + 1 2 V T L V + 1 2 H T J H } ∑ v i 1 Z exp { V T W H + 1 2 V T L V + 1 2 H T J H } = 1 Z exp { V T W H + 1 2 V T L V } ⋅ exp { 1 2 H T J H } 1 Z exp { 1 2 H T J H } ⋅ ∑ v i exp { V T W H + 1 2 V T L V } = exp { V T W H + 1 2 V T L V } ∑ v i exp { V T W H + 1 2 V T L V } = exp { V T W H + 1 2 V T L V } ∣ v i = 1 exp { V T W H + 1 2 V T L V } ∣ v i = 0 + exp { V T W H + 1 2 V T L V } ∣ v i = 1 \begin{align} P(v_i|H, V_{-i}) &= \frac{P(H, V)}{P(H, V_{-i})} \\ &= \frac{ \frac{1}{Z} \exp{\lbrace - E[V, H] \rbrace} }{ \sum_{v_i} \frac{1}{Z} \exp{\lbrace - E[V, H] \rbrace}} \\ &= \frac{ \frac{1}{Z} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H} \rbrace} }{ \sum_{v_i} \frac{1}{Z} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H} \rbrace}} \\ &= \frac{ \frac{1}{Z} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace} \cdot \exp{\lbrace \frac{1}{2} {H^T J H} \rbrace} }{ \frac{1}{Z} \exp{\lbrace \frac{1}{2} {H^T J H} \rbrace} \cdot \sum_{v_i} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}} \\ &= \frac{ \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace} }{ \sum_{v_i} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}} \\ &= \frac{ \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}|_{v_i = 1} }{ \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}|_{v_i = 0} + \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}|_{v_i = 1} } \\ \end{align} P(vi∣H,V−i)=P(H,V−i)P(H,V)=∑viZ1exp{−E[V,H]}Z1exp{−E[V,H]}=∑viZ1exp{VTWH+21VTLV+21HTJH}Z1exp{VTWH+21VTLV+21HTJH}=Z1exp{21HTJH}⋅∑viexp{VTWH+21VTLV}Z1exp{VTWH+21VTLV}⋅exp{21HTJH}=∑viexp{VTWH+21VTLV}exp{VTWH+21VTLV}=exp{VTWH+21VTLV}∣vi=0+exp{VTWH+21VTLV}∣vi=1exp{VTWH+21VTLV}∣vi=1
若我们将相同的部份表示为 Δ v i \Delta_{v_i} Δvi,则可以将公式写为:
P ( v i ∣ H , V − i ) = Δ v i ∣ v i = 1 Δ v i ∣ v i = 0 + Δ v i ∣ v i = 1 \begin{align} P(v_i|H, V_{-i}) &= \frac{ \Delta_{v_i}|_{v_i = 1} }{ \Delta_{v_i}|_{v_i = 0} + \Delta_{v_i}|_{v_i = 1} } \\ \end{align} P(vi∣H,V−i)=Δvi∣vi=0+Δvi∣vi=1Δvi∣vi=1
其中 Δ v i \Delta_{v_i} Δvi可以做如下变换:
Δ v i = exp { V T W H + 1 2 V T L V } = exp { ∑ i ^ = 1 D ∑ j = 1 P v i ^ W i ^ j h j + 1 2 ∑ i ^ = 1 D ∑ k = 1 D v i ^ L i ^ k v k } \begin{align} \Delta_{v_i} &= \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace} \\ &= \exp{\lbrace \sum_{{\hat i} = 1}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \frac{1}{2} \sum_{{\hat i} = 1}^{D} \sum_{k = 1}^{D} {v_{\hat i} L_{{\hat i} k} v_k} \rbrace} \end{align} Δvi=exp{VTWH+21VTLV}=exp{i^=1∑Dj=1∑Pvi^Wi^jhj+21i^=1∑Dk=1∑Dvi^Li^kvk}
我们接下来将有 v i v_i vi的项全部拆分出来:
Δ v i = exp { ∑ i ^ = 1 , − i D ∑ j = 1 P v i ^ W i ^ j h j + ∑ j = 1 P v i W i j h j } ⋅ exp { 1 2 ( ∑ i ^ = 1 , − i D ∑ k = 1 , − i D v i ^ W i ^ k h k + v i L i i v i ⏟ 0 + ∑ i ^ = 1 , − i D v i ^ W i ^ i v i ⏟ 相同 + ∑ k = 1 , − i D v i L i k v k ) } = exp { ∑ i ^ = 1 , − i D ∑ j = 1 P v i ^ W i ^ j h j + ∑ j = 1 P v i W i j h j + 1 2 ∑ i ^ = 1 , − i D ∑ k = 1 , − i D v i ^ W i ^ k h k + ∑ k = 1 , − i D v i L i k v k } \begin{align} \Delta_{v_i} &= \exp{\lbrace \sum_{{\hat i} = 1, -i}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \sum_{j = 1}^{P} {v_i W_{i j} h_j} \rbrace} \\ & \cdot \exp{\lbrace \frac{1}{2} \left( \sum_{{\hat i} = 1, -i}^{D} \sum_{k = 1,-i}^{D} {v_{\hat i} W_{{\hat i} k} h_k} + \underbrace{v_i L_{ii} v_i}_{0} + \underbrace{\sum_{{\hat i} = 1, -i}^{D} {v_{\hat i} W_{{\hat i} i} v_i}}_{相同} + \sum_{k = 1, -i}^{D} {v_i L_{i k} v_k} \right) \rbrace} \\ &= \exp{\lbrace \sum_{{\hat i} = 1, -i}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \sum_{j = 1}^{P} {v_i W_{i j} h_j} + \frac{1}{2} \sum_{{\hat i} = 1, -i}^{D} \sum_{k = 1,-i}^{D} {v_{\hat i} W_{{\hat i} k} h_k} + \sum_{k = 1, -i}^{D} {v_i L_{i k} v_k} \rbrace} \end{align} Δvi=exp{i^=1,−i∑Dj=1∑Pvi^Wi^jhj+j=1∑PviWijhj}⋅exp{21 i^=1,−i∑Dk=1,−i∑Dvi^Wi^khk+0 viLiivi+相同 i^=1,−i∑Dvi^Wi^ivi+k=1,−i∑DviLikvk }=exp{i^=1,−i∑Dj=1∑Pvi^Wi^jhj+j=1∑PviWijhj+21i^=1,−i∑Dk=1,−i∑Dvi^Wi^khk+k=1,−i∑DviLikvk}
所以我们将 v i = 1 v_i = 1 vi=1和 v i = 0 v_i = 0 vi=0代入该公式即可得出结果。
Δ v i = 0 = exp { ∑ i ^ = 1 , − i D ∑ j = 1 P v i ^ W i ^ j h j + 1 2 ∑ i ^ = 1 , − i D ∑ k = 1 , − i D v i ^ W i ^ k h k } = exp { A + B } Δ v i = 1 = exp { A + B + ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } \begin{align} \Delta_{v_i = 0} &= \exp{\lbrace \sum_{{\hat i} = 1, -i}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \frac{1}{2} \sum_{{\hat i} = 1, -i}^{D} \sum_{k = 1,-i}^{D} {v_{\hat i} W_{{\hat i} k} h_k} \rbrace} = \exp{\lbrace A + B \rbrace} \\ \Delta_{v_i = 1} &= \exp{\lbrace A + B + \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} \end{align} Δvi=0Δvi=1=exp{i^=1,−i∑Dj=1∑Pvi^Wi^jhj+21i^=1,−i∑Dk=1,−i∑Dvi^Wi^khk}=exp{A+B}=exp{A+B+j=1∑PWijhj+k=1,−i∑DLikvk}
P ( v i ∣ H , V − i ) = Δ v i ∣ v i = 1 Δ v i ∣ v i = 0 + Δ v i ∣ v i = 1 = exp { A + B + ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } exp { A + B } + exp { A + B + ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } = exp { ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } 1 + exp { ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } = σ ( ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k ) \begin{align} P(v_i|H, V_{-i}) &= \frac{ \Delta_{v_i}|_{v_i = 1} }{ \Delta_{v_i}|_{v_i = 0} + \Delta_{v_i}|_{v_i = 1} } \\ &= \frac{ \exp{\lbrace A + B + \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} }{ \exp{\lbrace A + B \rbrace} + \exp{\lbrace A + B + \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} } \\ &= \frac{ \exp{\lbrace \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} }{ 1 + \exp{\lbrace \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} } \\ &= \sigma(\sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k}) \end{align} P(vi∣H,V−i)=Δvi∣vi=0+Δvi∣vi=1Δvi∣vi=1=exp{A+B}+exp{A+B+∑j=1PWijhj+∑k=1,−iDLikvk}exp{A+B+∑j=1PWijhj+∑k=1,−iDLikvk}=1+exp{∑j=1PWijhj+∑k=1,−iDLikvk}exp{∑j=1PWijhj+∑k=1,−iDLikvk}=σ(j=1∑PWijhj+k=1,−i∑DLikvk)
28.4 基于VI[平均场理论]求解后验概率
我们的参数,通过梯度求出的变化量可以表示为:
{ Δ W = α ( E P d a t a [ V H T ] − E P m o d e l [ V H T ] ) Δ L = α ( E P d a t a [ V V T ] − E P m o d e l [ V V T ] ) Δ J = α ( E P d a t a [ H H T ] − E P m o d e l [ H H T ] ) \begin{cases} \Delta W = \alpha (E_{P_{data}} \left[ V H^T \right] - E_{P_{model}} \left[ V H^T \right]) \\ \Delta L = \alpha (E_{P_{data}} \left[ V V^T \right] - E_{P_{model}} \left[ V V^T \right]) \\ \Delta J = \alpha (E_{P_{data}} \left[ H H^T \right] - E_{P_{model}} \left[ H H^T \right]) \\ \end{cases} ⎩ ⎨ ⎧ΔW=α(EPdata[VHT]−EPmodel[VHT])ΔL=α(EPdata[VVT]−EPmodel[VVT])ΔJ=α(EPdata[HHT]−EPmodel[HHT])
但是如果要直接求出其后验概率,还应该从 L = E L B O {\mathcal L} = ELBO L=ELBO开始分析,通过平均场理论(在VI中使用过)进行分解:
L = E L B O = log P θ ( V ) − K L ( q ϕ ∥ p θ ) = ∑ h q ϕ ( H ∣ V ) ⋅ log P θ ( V , H ) + H [ q ] \begin{align} {\mathcal L} &= ELBO = \log P_\theta(V) - KL(q_\phi \Vert p_\theta) = \sum_h q_\phi(H|V) \cdot \log P_\theta(V,H) + H[q] \end{align} L=ELBO=logPθ(V)−KL(qϕ∥pθ)=h∑qϕ(H∣V)⋅logPθ(V,H)+H[q]
我们在这里做出一些假设(将 q ( H ∣ V ) q(H|V) q(H∣V)拆分为P个维度之积):
{ q ϕ ( H ∣ V ) = ∏ j = 1 P q ϕ ( H j ∣ V ) q ϕ ( H j = 1 ∣ V ) = ϕ j ϕ = { ϕ j } j = 1 P \begin{cases} q_\phi(H|V) = \prod_{j=1}^{P} q_\phi(H_j|V) \\ q_\phi(H_j = 1| V) = \phi_j \\ \phi = \{\phi_j\}_{j=1}^P \\ \end{cases} ⎩ ⎨ ⎧qϕ(H∣V)=∏j=1Pqϕ(Hj∣V)qϕ(Hj=1∣V)=ϕjϕ={ϕj}j=1P
如果我们要求出后验概率就是学习参数 θ \theta θ,在之类也等同于学习参数 ϕ \phi ϕ,于是我们可以对 a r g max ϕ j L arg\max_{\phi_j}{\mathcal L} argmaxϕjL进行求解,我们将其进行化简:
ϕ j ^ = a r g max ϕ j L = a r g max ϕ j E L B O = a r g max ϕ j ∑ h q ϕ ( H ∣ V ) ⋅ log P θ ( V , H ) + H [ q ] = a r g max ϕ j ∑ h q ϕ ( H ∣ V ) ⋅ [ − log Z + V T W H + 1 2 V T L V + 1 2 H T J H ] + H [ q ] = a r g max ϕ j ∑ h q ϕ ( H ∣ V ) ⏟ = 1 ⋅ [ − log Z + 1 2 V T L V ] ⏟ 与h和 ϕ j 都无关,为常数C + ∑ h q ϕ ( H ∣ V ) ⋅ [ V T W H + 1 2 H T J H ] + H [ q ] = a r g max ϕ j ∑ h q ϕ ( H ∣ V ) ⋅ [ V T W H + 1 2 H T J H ] + H [ q ] = a r g max ϕ j ∑ h q ϕ ( H ∣ V ) ⋅ V T W H ⏟ ( 1 ) + 1 2 ∑ h q ϕ ( H ∣ V ) ⋅ H T J H ⏟ ( 2 ) + H [ q ] ⏟ ( 3 ) \begin{align} {\hat {\phi_j}} &= arg\max_{\phi_j} {\mathcal L} = arg\max_{\phi_j} ELBO \\ &= arg\max_{\phi_j} \sum_h q_\phi(H|V) \cdot \log P_\theta(V,H) + H[q] \\ &= arg\max_{\phi_j} \sum_h q_\phi(H|V) \cdot \left[ -\log Z + {V^T W H} + \frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H} \right] + H[q] \\ &= arg\max_{\phi_j} \underbrace{\sum_h q_\phi(H|V)}_{=1} \cdot \underbrace{\left[ -\log Z + \frac{1}{2} {V^T L V} \right]}_{\text{与h和$\phi_j$都无关,为常数C}} + \sum_h q_\phi(H|V) \cdot \left[ {V^T W H} + \frac{1}{2} {H^T J H} \right] + H[q] \\ &= arg\max_{\phi_j} \sum_h q_\phi(H|V) \cdot \left[ {V^T W H} + \frac{1}{2} {H^T J H} \right] + H[q] \\ &= arg\max_{\phi_j} \underbrace{\sum_h q_\phi(H|V) \cdot {V^T W H}}_{(1)} + \underbrace{\frac{1}{2} \sum_h q_\phi(H|V) \cdot {H^T J H}}_{(2)} + \underbrace{H[q]}_{(3)} \\ \end{align} ϕj^=argϕjmaxL=argϕjmaxELBO=argϕjmaxh∑qϕ(H∣V)⋅logPθ(V,H)+H[q]=argϕjmaxh∑qϕ(H∣V)⋅[−logZ+VTWH+21VTLV+21HTJH]+H[q]=argϕjmax=1 h∑qϕ(H∣V)⋅与h和ϕj都无关,为常数C [−logZ+21VTLV]+h∑qϕ(H∣V)⋅[VTWH+21HTJH]+H[q]=argϕjmaxh∑qϕ(H∣V)⋅[VTWH+21HTJH]+H[q]=argϕjmax(1) h∑qϕ(H∣V)⋅VTWH+(2) 21h∑qϕ(H∣V)⋅HTJH+(3) H[q]
得到如上公式后,我们只需对每个部份进行求导即可得到结果,过程中引入假设(拆分维度)即可更加优化公式,我们以 ( 1 ) (1) (1)为例:
( 1 ) = ∑ h q ϕ ( H ∣ V ) ⋅ V T W H = ∑ h ∏ j ^ = 1 P q ϕ ( H j ^ ∣ V ) ⋅ ∑ i = 1 D ∑ j ^ = 1 P v i w i j ^ h j ^ \begin{align} (1) &= \sum_h q_\phi(H|V) \cdot {V^T W H} = \sum_h \prod_{{\hat j}=1}^{P} q_\phi(H_{\hat j}|V) \cdot \sum_{i=1}^{D} \sum_{{\hat j}=1}^{P} {v_i w_{i{\hat j}} h_{\hat j}} \end{align} (1)=h∑qϕ(H∣V)⋅VTWH=h∑j^=1∏Pqϕ(Hj^∣V)⋅i=1∑Dj^=1∑Pviwij^hj^
我们取出其中的一项,如 i = 1 , j ^ = 2 i = 1, {\hat j} = 2 i=1,j^=2,可以得到:
∑ h ∏ j ^ = 1 P q ϕ ( H j ^ ∣ V ) ⋅ v 1 w 12 h 2 = ∑ h 2 q ϕ ( H 2 ∣ V ) ⋅ v 1 w 12 h 2 ⏟ 提出 h 2 相关项 ⋅ ∑ h , − h 2 ∏ j ^ = 1 , − 2 P q ϕ ( H j ^ ∣ V ) ⏟ = 1 = ∑ h 2 q ϕ ( H 2 ∣ V ) ⋅ v 1 w 12 h 2 = q ϕ ( H 2 = 1 ∣ V ) ⋅ v 1 w 12 ⋅ 1 + q ϕ ( H 2 = 0 ∣ V ) ⋅ v 1 w 12 ⋅ 0 = ϕ 2 v 1 w 12 \begin{align} \sum_h \prod_{{\hat j}=1}^{P} q_\phi(H_{\hat j}|V) \cdot {v_1 w_{12} h_{2}} &= \underbrace{\sum_{h_2} q_\phi(H_2|V) \cdot {v_1 w_{12} h_{2}}}_{\text{提出$h_2$相关项}} \cdot \underbrace{\sum_{h, -h_2} \prod_{{\hat j}=1, -2}^{P} q_\phi(H_{\hat j}|V)}_{=1} \\ &= \sum_{h_2} q_\phi(H_2|V) \cdot {v_1 w_{12} h_{2}} \\ &= q_\phi(H_2 = 1|V) \cdot {v_1 w_{12} \cdot 1} + q_\phi(H_2 = 0|V) \cdot {v_1 w_{12} \cdot 0} \\ &= \phi_2 {v_1 w_{12}} \end{align} h∑j^=1∏Pqϕ(Hj^∣V)⋅v1w12h2=提出h2相关项 h2∑qϕ(H2∣V)⋅v1w12h2⋅=1 h,−h2∑j^=1,−2∏Pqϕ(Hj^∣V)=h2∑qϕ(H2∣V)⋅v1w12h2=qϕ(H2=1∣V)⋅v1w12⋅1+qϕ(H2=0∣V)⋅v1w12⋅0=ϕ2v1w12
所以 ( 1 ) (1) (1)的求和结果就应该是 ∑ i = 1 D ∑ j ^ = 1 P ϕ j ^ v i w i j ^ \sum_{i=1}^{D} \sum_{{\hat j}=1}^{P} \phi_{\hat j} v_i w_{i{\hat j}} ∑i=1D∑j^=1Pϕj^viwij^,同理可得 ( 2 ) , ( 3 ) (2), (3) (2),(3)结果为:
{ ( 1 ) = ∑ i = 1 D ∑ j ^ = 1 P ϕ j ^ v i w i j ^ ( 2 ) = ∑ j ^ = 1 P ∑ m = 1 , − j P ϕ j ^ ϕ m J j ^ m + C ( 3 ) = − ∑ j = 1 P [ ϕ j log ϕ j + ( 1 − ϕ j ) log ( 1 − ϕ j ) ] \begin{cases} (1) = \sum_{i=1}^{D} \sum_{{\hat j}=1}^{P} \phi_{\hat j} v_i w_{i{\hat j}} \\ (2) = \sum_{{\hat j}=1}^{P} \sum_{m=1, -j}^{P} \phi_{\hat j} \phi_m J_{{\hat j}m} + C \\ (3) = - \sum_{j=1}^P \left[ \phi_j \log \phi_j + (1-\phi_j) \log (1-\phi_j) \right] \\ \end{cases} ⎩ ⎨ ⎧(1)=∑i=1D∑j^=1Pϕj^viwij^(2)=∑j^=1P∑m=1,−jPϕj^ϕmJj^m+C(3)=−∑j=1P[ϕjlogϕj+(1−ϕj)log(1−ϕj)]
通过求导又可得:
{ ∇ ϕ j ( 1 ) = ∑ i = 1 D v i w i j ∇ ϕ j ( 2 ) = ∑ m = 1 , − j P ϕ m J j m ∇ ϕ j ( 3 ) = − log ϕ j 1 − ϕ j \begin{cases} \nabla_{\phi_j} (1) = \sum_{i=1}^{D} v_i w_{ij} \\ \nabla_{\phi_j} (2) = \sum_{m=1, -j}^{P} \phi_m J_{jm} \\ \nabla_{\phi_j} (3) = - \log \frac{\phi_j}{1 - \phi_j} \\ \end{cases} ⎩ ⎨ ⎧∇ϕj(1)=∑i=1Dviwij∇ϕj(2)=∑m=1,−jPϕmJjm∇ϕj(3)=−log1−ϕjϕj
根据 ∇ ϕ j ( 1 ) + ∇ ϕ j ( 2 ) + ∇ ϕ j ( 3 ) = 0 \nabla_{\phi_j} (1) + \nabla_{\phi_j} (2) + \nabla_{\phi_j} (3) = 0 ∇ϕj(1)+∇ϕj(2)+∇ϕj(3)=0可得:
ϕ j = σ ( ∑ i = 1 D v i w i j + ∑ m = 1 , − j P ϕ m J j m ) \phi_j = \sigma(\sum_{i=1}^{D} v_i w_{ij} + \sum_{m=1, -j}^{P} \phi_m J_{jm}) ϕj=σ(i=1∑Dviwij+m=1,−j∑PϕmJjm)
由于 ϕ j \phi_j ϕj用于表示每一个维度的数据,所以我们可以使用 ϕ = { ϕ j } j = 1 P \phi = \{\phi_j\}_{j=1}^{P} ϕ={ϕj}j=1P通过坐标上升的方法进行求解。
相关文章:
28 玻尔兹曼机
文章目录 28 玻尔兹曼机28.1 模型定义28.2 梯度推导28.3 梯度上升28.4 基于VI[平均场理论]求解后验概率 28 玻尔兹曼机 28.1 模型定义 玻尔兹曼机是一张无向图,其中的隐节点和观测节点可以有任意连接如下图: 我们给其中的节点、连线做出一些定义&#…...
命令提示符之操作基础(Windows)
打开命令提示符 方法一 打开指定文件的文件夹,在路径栏里输入“cmd”,回车,就进入控制台了。默认路径就是指定文件夹的路径。 方法二 打开指定的文件夹,按住shift键,在空白处右击,在菜单栏中选择“在此处打…...
【C语言】初识C语言+进阶篇导读
✨个人主页: Anmia.🎉所属专栏: C Language 🎃操作环境: Visual Studio 2019 版本 本篇目的是面向编程新手,没接触过编程的人。以及C进阶的导读。 内容是C语言重要知识点的简单解释,不做详解。给…...

wxWidgets学习笔记:wxListCtrl使用详解
使用案例 wxListCtrl中放21个item,每一行放两个item,每个item显示图标和名字,点击某个图标,该图标呈现响应状态并响应对应的事件 以下是使用wxListCtrl实现放置21个item,每一行放两个item,每个item显示图…...

酷炫的python日志库-loguru
Loguru是一个python的日志库,比logging更简单,好用,功能丰富。 GitHub - Delgan/loguru: Python logging made (stupidly) simple 安装 pip install loguru 特征 开箱即用,补样板没有处理程序,没有清理程序ÿ…...

html根据图片变换背景色
html根据图片变换背景色 <!DOCTYPE html> <html><head><meta charset"utf-8"><title></title><style>.item {width: 50%;height: 80vh;margin: 0 auto;border: 1px solid red;}</style> </head><body>…...

“深入探究JVM:揭秘Java虚拟机的工作原理“
标题:深入探究JVM:揭秘Java虚拟机的工作原理 摘要:本文将深入探究Java虚拟机(JVM)的工作原理,包括JVM的架构、内存管理、垃圾回收机制以及即时编译等关键概念。通过详细解释这些概念,读者将能够…...

小程序的api使用 以及一些weui组件实列获取头像 扫码等
今日目标 响应式单位rpx小程序的生命周期 【重点】20%小程序框架 weui 【重点】 50%内置API 【重点】30%综合练习 1. 响应式rpx 1.1 rpx单位 rpx是微信小程序提出的一个尺寸单位,将整个手机屏幕宽度分为750份,1rpx 就是 1/750,避免不同手…...
海思ss928部署手写数字识别模型
大致流程--------------------------------------------------------------------------------------------------------------------- 模型转换---------------------------------------------------------------------------------------------------- 1:准备MNI…...

组学知识速递(五)|ChIP-seq知多少?
近段时间来,我们合作的ChIP-Seq技术发表的高分成功案例一篇接一篇,您是否心动了呢?本篇文章,总结了ChIP-Seq实验部分重点知识点,开启ChIP-Seq的你绝不要错过! Q1 什么是ChIP-Seq? ChIP-Seq即染…...

2308C++内存序概略
参考 释放:在释放前的任意读写操作不能放在此操作之后. 获取:在获取后的任意读写操作不能放在此操作之前. 放松:只保证本操作的原子性,一般用于统计. 消费:在加载后的依赖本原子变量的,都不能重排在本操作之前. 获取释放:获取释放 序列一致,完全一致....
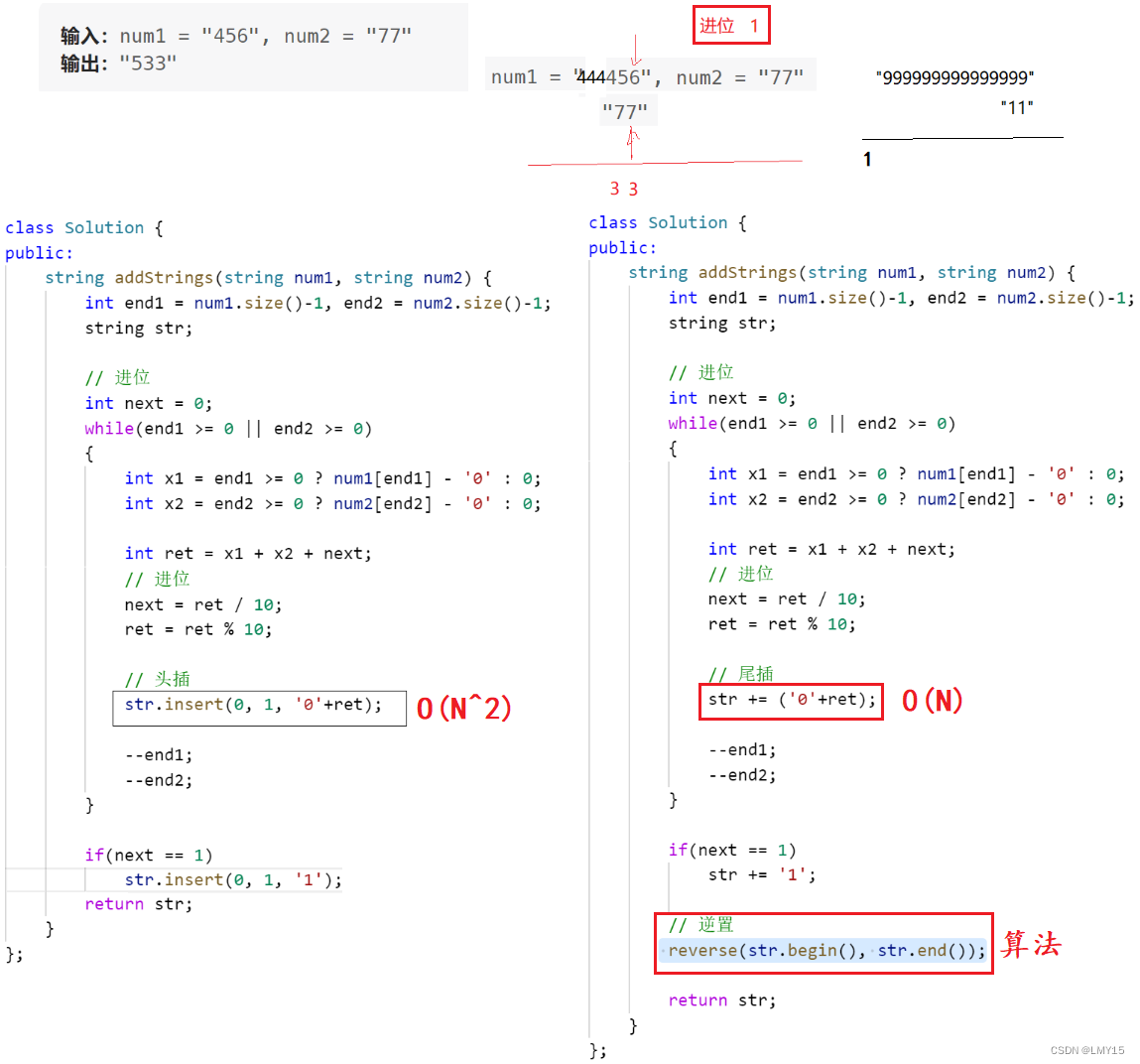
【C++】string的使用
1、string的使用 #define _CRT_SECURE_NO_WARNINGS 1 #include <iostream> #include<string> using namespace std;void Test1() {string s1;string s2("hello");cin >> s1;cout << s1 << endl;//strcat【字符串拼接】string ret1 s…...

Android 周期任务
AlarmManager使用 1.创建意图 // 创建意图,启动MonthlyTaskServiceIntent intent new Intent(getContext(), TimeTaskService.class); // 传递数据intent.putExtra(TimeTaskService.KEY_TITLE,userRemind.getTitle());intent.putExtra(TimeTaskService.KEY_DEC,u…...
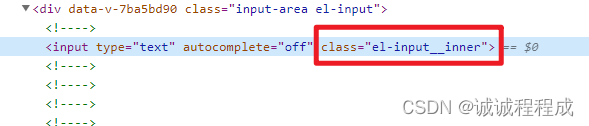
修改第三方组件默认样式
深度选择器 修改el-input的样式: <el-input class"input-area"></el-input>查看DOM结构: 原本使用 /deep/ 但是可能不兼容 使用 :deep .input-area {:deep(.el-input__inner){background-color: blue;} }将 input 框背景色改为…...

【游戏客户端】制作你玩我猜Like玩法
【游戏客户端】制作你玩我猜Like玩法 大家好,我是Lampard猿奋~~ “你画我猜”相信大家都不陌生,当初这款小游戏可谓茶余饭后必玩之选,风头一时无二。今天要和大家分享如何实现一个你玩我猜Like的玩法。 我们可以简单的把需求拆成两个个部分&…...

分页查询从接口到实现,统一对日期类型进行格式化处理
编写Service实现类编写Mapper的sql,但复杂的sql语句需要写到mapper对应的xml文件中日期类型格式化处理 /*** 扩展springmvc框架的消息转换器* param converters*/Overrideprotected void extendMessageConverters(List<HttpMessageConverter<?>> conve…...
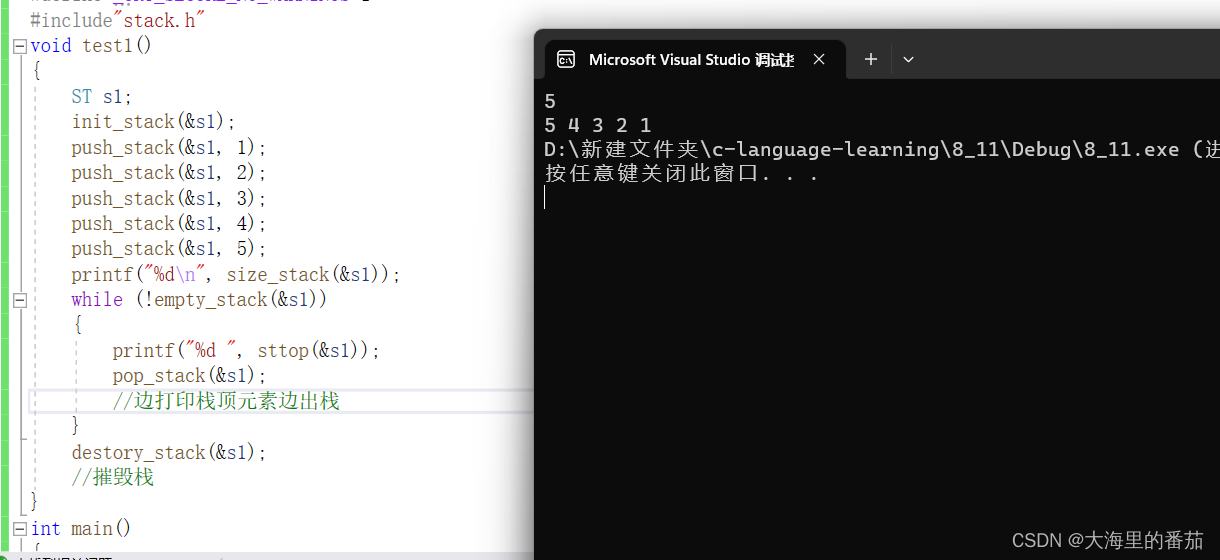
栈和队列详解(1)
目录 一、什么是栈? 二、创建一个我们自己的栈 1.前置准备 1.1需要的三个文件 1.2结构体的创建和头文件的引用 2.接口的实现 2.1初始化栈结构体 2.2尾插(压栈) 2.3栈存放的元素个数和判断栈是否为空 2.4获取栈顶元素 2.5出栈 2.6摧毁栈 2.7测试接口 三、…...

苏州OV泛域名RSA加密算法https
RSA加密算法是一种非对称加密算法,它被广泛应用于信息安全领域。与对称加密算法不同,RSA加密算法使用了两个密钥,一个公钥和一个私钥。公钥可以公开,任何人都可以使用它加密信息,但只有私钥的持有者才能解密信息。RSA加…...

凯迪正大—微机继电保护校验仪
一、继电保护测试仪产品概述 KDJB-802继电保护测试仪是在参照电力部颁发的《微机型继电保护试验装置技术条件(讨论稿)》的基础上,听取用户意见,总结目前国内同类产品优缺点,充分使用现代的微电子技术和器件实现的一种新…...

Linux文件属性与权限管理(可读、可写、可执行)
Linux把所有文件和设备都当作文件来管理,这些文件都在根目录下,同时Linux中的文件名区分大小写。 一、文件属性 使用ls -l命令查看文件详情: 1、每行代表一个文件,每行的第一个字符代表文件类型,linux文件类型包括&am…...

通过 Taotoken 审计日志追溯 API 调用详情与安全分析
通过 Taotoken 审计日志追溯 API 调用详情与安全分析 1. 审计日志的核心价值 对于使用 Taotoken 平台的企业团队而言,审计日志是追踪 API 调用行为的关键工具。它记录了每一次请求的元数据,包括调用时间、发起账号、目标模型、消耗 token 数量以及响应…...

用ESP8266和Arduino IDE做个智能家居开关:从配置WiFi到网页控制LED保姆级教程
用ESP8266打造零基础智能家居开关:从硬件连接到网页控制全流程解析 当你躺在床上准备入睡,突然发现客厅的灯还亮着,这时候如果有个手机就能控制的智能开关该多方便?今天我们就用不到50元的硬件成本,实现这个看似高大上…...

BLV MGN Cube 3D打印机升级Klipper保姆级教程:从树莓派3B到SKR V1.3主板完整配置流程
BLV MGN Cube 3D打印机Klipper固件全栈升级指南:从树莓派部署到SKR主板深度调优 当你的BLV MGN Cube开始出现打印速度瓶颈或运动控制不够流畅时,Klipper固件就像为这台机器注入了新的灵魂。不同于传统Marlin固件在8位主控上的性能局限,Klipp…...
)
别再手动翻文件夹了!用VBA的Dir函数一键获取所有文件清单(Excel/Word通用)
用VBA的Dir函数实现高效文件管理:从基础到实战 引言 每个月末,财务部门的李华都要面对一项繁琐的任务——收集分散在各个子文件夹中的报表文件。过去她需要逐个打开文件夹,手动复制文件名和路径到Excel中,这项工作往往要花费大半天…...

别再被LabVIEW事件结构坑了!程序修改控件值不触发事件?试试这个属性节点
LabVIEW事件结构深度解析:如何精准触发程序修改的控件值改变事件 在LabVIEW开发过程中,事件结构是构建响应式用户界面的核心工具之一。但许多初中级开发者都会遇到一个令人困惑的现象:当通过程序代码修改控件值时,预期中的"值…...

KISSABC伴学 英语沉浸式伴学优势深度解析
KISSABC伴学聚焦少儿英语伴学,以“沉浸式语言环境专业引导”为核心,区别于传统英语学习工具“跟读式”“刷题式”的学习模式,打造“听、说、读、玩”四位一体的沉浸式伴学体验,助力孩子培养语感、规范发音、提升口语,贴…...

终极指南:如何免费解锁WeMod高级功能?Wand-Enhancer为你提供完整解决方案
终极指南:如何免费解锁WeMod高级功能?Wand-Enhancer为你提供完整解决方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否…...

探索图像转字节数组的奥秘:3个技巧让OLED开发效率翻倍
探索图像转字节数组的奥秘:3个技巧让OLED开发效率翻倍 【免费下载链接】image2cpp 项目地址: https://gitcode.com/gh_mirrors/im/image2cpp 在嵌入式开发的世界里,为单色OLED显示屏准备图像数据曾是一项繁琐的技术挑战。传统方法要么依赖复杂的…...

Blender 3MF插件终极指南:如何轻松实现3D打印模型的无损传输
Blender 3MF插件终极指南:如何轻松实现3D打印模型的无损传输 【免费下载链接】Blender3mfFormat Blender add-on to import/export 3MF files 项目地址: https://gitcode.com/gh_mirrors/bl/Blender3mfFormat 还在为3D打印工作流中的格式转换问题烦恼吗&…...

LinkSwift:八大网盘直链下载助手 - 免费解锁全速下载的终极解决方案
LinkSwift:八大网盘直链下载助手 - 免费解锁全速下载的终极解决方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移…...