竞赛项目 深度学习疲劳驾驶检测 opencv python
文章目录
- 0 前言
- 1 课题背景
- 2 实现目标
- 3 当前市面上疲劳驾驶检测的方法
- 4 相关数据集
- 5 基于头部姿态的驾驶疲劳检测
- 5.1 如何确定疲劳状态
- 5.2 算法步骤
- 5.3 打瞌睡判断
- 6 基于CNN与SVM的疲劳检测方法
- 6.1 网络结构
- 6.2 疲劳图像分类训练
- 6.3 训练结果
- 7 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 深度学习疲劳驾驶检测 opencv python
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate

1 课题背景
关于对疲劳驾驶的研究不在少数, 不少学者从人物面部入手展开。 人类的面部包含着许多不同的特征信息, 例如其中一些比较明显的特征如打哈欠、 闭眼、
揉眼等表情特征可用来作为判断驾驶员是否处于疲劳状态的依据。 随着计算机技术的不断发展, 尤其是在人工智能相关技术勃发的今天,
借助计算机可以快速有效的识别出图片中人脸特征, 对处于当前时刻驾驶员的精神状态做出判断, 并将疲劳预警信息传达给司机, 以保证交通的安全运行,
减少伤亡事故的发生。
2 实现目标
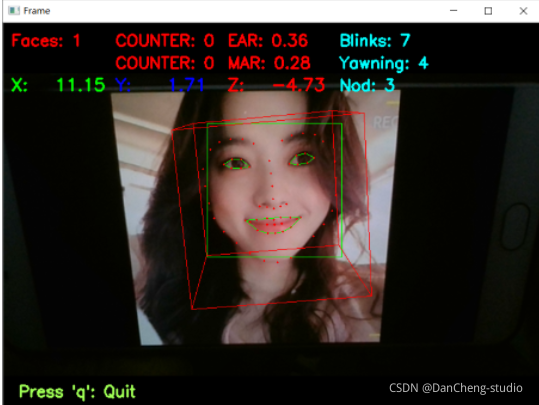
经查阅相关文献,疲劳在人体面部表情中表现出大致三个类型:打哈欠(嘴巴张大且相对较长时间保持这一状态)、眨眼(或眼睛微闭,此时眨眼次数增多,且眨眼速度变慢)、点头(瞌睡点头)。本实验从人脸朝向、位置、瞳孔朝向、眼睛开合度、眨眼频率、瞳孔收缩率等数据入手,并通过这些数据,实时地计算出驾驶员的注意力集中程度,分析驾驶员是否疲劳驾驶和及时作出安全提示。
3 当前市面上疲劳驾驶检测的方法
学长通过对疲劳驾驶在不同方法下研究进展的分析, 可以更清晰的认识的到当下对该问题较为有效的判定方法。 根据研究对象的不同对检测方法进行分类,
具体分类方法如图

基于驾驶员面部特征的检测方法是根据人在疲劳时面部变化来分析此时的精神状态。 人在瞌睡、 疲劳时面部表情与清醒时有着明显的区别。
通过装置在车辆中的摄像头对驾驶员人脸图片的采集, 利用计算机图像处理和模式识别, 可以有效检测驾驶员的疲
劳特征信息, 比较直观的特征有: 打哈欠, 眨眼, 低头等。
4 相关数据集
学长收集的疲劳检测数据集
驾驶疲劳人脸数据库图片来源分为 3 部分, 每部分均包含疲劳、 轻度疲劳和非疲劳三种精神状态类别。 样本数据库共 4800 张图像, 其中疲劳状态有
1622 张数据样本, 轻度疲劳有 1506 张数据样本, 非疲劳状态有 1618 张数据样本。 各部分数据结构如下: 网络采集部分疲劳包含 435
张样本图片, 轻度疲劳状态包含 430 张样本图片, 非疲劳状态包含 432 张样本图片, 共 1297 张样本数据图像; 视频数据库采集部分疲劳状态包含
1037张样本图像, 轻度疲劳状态包含 1030 张样本图片, 非疲劳状态包含 1036 张样本图片,共 3103 张样本数据图像;

5 基于头部姿态的驾驶疲劳检测
5.1 如何确定疲劳状态
-
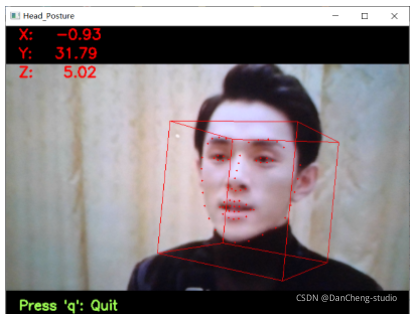
思路一:可利用姿态估计结果(如Pitch的读数)来判断是否点头及点头幅度
-
思路二:或用鼻尖处30号点的前后移动值(或是方差,方差表示一个单位时间数据的偏离程度,程度越大,则表示发生点头动作的概率越大、点头幅度越大)
5.2 算法步骤
-
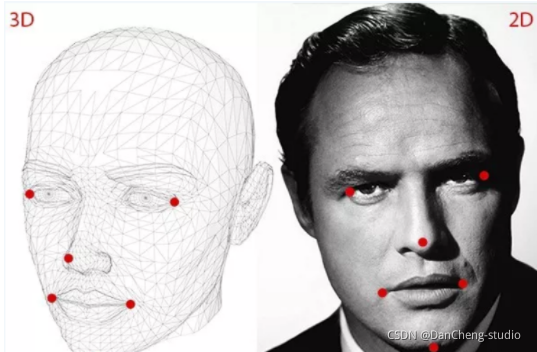
第一步:2D人脸关键点检测;
-
第二步:3D人脸模型匹配;
-
第三步:求解3D点和对应2D点的转换关系;
-
第四步:根据旋转矩阵求解欧拉角。
import cv2 import dlib import numpy as np from imutils import face_utils """ 思路:第一步:2D人脸关键点检测;第二步:3D人脸模型匹配;第三步:求解3D点和对应2D点的转换关系;第四步:根据旋转矩阵求解欧拉角。 """# 加载人脸检测和姿势估计模型(dlib)face_landmark_path = 'D:/myworkspace/JupyterNotebook/fatigue_detecting/model/shape_predictor_68_face_landmarks.dat'""" 只要知道世界坐标系内点的位置、像素坐标位置和相机参数就可以搞定旋转和平移矩阵(OpenCV自带函数solvePnp()) """# 世界坐标系(UVW):填写3D参考点,该模型参考http://aifi.isr.uc.pt/Downloads/OpenGL/glAnthropometric3DModel.cppobject_pts = np.float32([[6.825897, 6.760612, 4.402142], #33左眉左上角[1.330353, 7.122144, 6.903745], #29左眉右角[-1.330353, 7.122144, 6.903745], #34右眉左角[-6.825897, 6.760612, 4.402142], #38右眉右上角[5.311432, 5.485328, 3.987654], #13左眼左上角[1.789930, 5.393625, 4.413414], #17左眼右上角[-1.789930, 5.393625, 4.413414], #25右眼左上角[-5.311432, 5.485328, 3.987654], #21右眼右上角[2.005628, 1.409845, 6.165652], #55鼻子左上角[-2.005628, 1.409845, 6.165652], #49鼻子右上角[2.774015, -2.080775, 5.048531], #43嘴左上角[-2.774015, -2.080775, 5.048531],#39嘴右上角[0.000000, -3.116408, 6.097667], #45嘴中央下角[0.000000, -7.415691, 4.070434]])#6下巴角# 相机坐标系(XYZ):添加相机内参K = [6.5308391993466671e+002, 0.0, 3.1950000000000000e+002,0.0, 6.5308391993466671e+002, 2.3950000000000000e+002,0.0, 0.0, 1.0]# 等价于矩阵[fx, 0, cx; 0, fy, cy; 0, 0, 1]# 图像中心坐标系(uv):相机畸变参数[k1, k2, p1, p2, k3]D = [7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000]# 像素坐标系(xy):填写凸轮的本征和畸变系数cam_matrix = np.array(K).reshape(3, 3).astype(np.float32) dist_coeffs = np.array(D).reshape(5, 1).astype(np.float32)# 重新投影3D点的世界坐标轴以验证结果姿势reprojectsrc = np.float32([[10.0, 10.0, 10.0],[10.0, 10.0, -10.0],[10.0, -10.0, -10.0],[10.0, -10.0, 10.0],[-10.0, 10.0, 10.0],[-10.0, 10.0, -10.0],[-10.0, -10.0, -10.0],[-10.0, -10.0, 10.0]])# 绘制正方体12轴line_pairs = [[0, 1], [1, 2], [2, 3], [3, 0],[4, 5], [5, 6], [6, 7], [7, 4],[0, 4], [1, 5], [2, 6], [3, 7]]def get_head_pose(shape):# 填写2D参考点,注释遵循https://ibug.doc.ic.ac.uk/resources/300-W/"""17左眉左上角/21左眉右角/22右眉左上角/26右眉右上角/36左眼左上角/39左眼右上角/42右眼左上角/45右眼右上角/31鼻子左上角/35鼻子右上角/48左上角/54嘴右上角/57嘴中央下角/8下巴角"""# 像素坐标集合image_pts = np.float32([shape[17], shape[21], shape[22], shape[26], shape[36],shape[39], shape[42], shape[45], shape[31], shape[35],shape[48], shape[54], shape[57], shape[8]])"""用solvepnp或sovlepnpRansac,输入3d点、2d点、相机内参、相机畸变,输出r、t之后用projectPoints,输入3d点、相机内参、相机畸变、r、t,输出重投影2d点计算原2d点和重投影2d点的距离作为重投影误差"""# solvePnP计算姿势——求解旋转和平移矩阵:# rotation_vec表示旋转矩阵,translation_vec表示平移矩阵,cam_matrix与K矩阵对应,dist_coeffs与D矩阵对应。_, rotation_vec, translation_vec = cv2.solvePnP(object_pts, image_pts, cam_matrix, dist_coeffs)# projectPoints重新投影误差reprojectdst, _ = cv2.projectPoints(reprojectsrc, rotation_vec, translation_vec, cam_matrix,dist_coeffs)reprojectdst = tuple(map(tuple, reprojectdst.reshape(8, 2)))# 以8行2列显示# 计算欧拉角calc euler angle# 参考https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#decomposeprojectionmatrixrotation_mat, _ = cv2.Rodrigues(rotation_vec)#罗德里格斯公式(将旋转矩阵转换为旋转向量)pose_mat = cv2.hconcat((rotation_mat, translation_vec))# 水平拼接,vconcat垂直拼接# eulerAngles –可选的三元素矢量,包含三个以度为单位的欧拉旋转角度_, _, _, _, _, _, euler_angle = cv2.decomposeProjectionMatrix(pose_mat)# 将投影矩阵分解为旋转矩阵和相机矩阵return reprojectdst, euler_angledef main():# returncap = cv2.VideoCapture(0)if not cap.isOpened():print("Unable to connect to camera.")return# 检测人脸detector = dlib.get_frontal_face_detector()# 检测第一个人脸的关键点predictor = dlib.shape_predictor(face_landmark_path)while cap.isOpened():ret, frame = cap.read()if ret:face_rects = detector(frame, 0)if len(face_rects) > 0:# 循环脸部位置信息,使用predictor(gray, rect)获得脸部特征位置的信息shape = predictor(frame, face_rects[0])# 将脸部特征信息转换为数组array的格式shape = face_utils.shape_to_np(shape)# 获取头部姿态reprojectdst, euler_angle = get_head_pose(shape)pitch = format(euler_angle[0, 0])yaw = format(euler_angle[1, 0])roll = format(euler_angle[2, 0])print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))# 标出68个特征点for (x, y) in shape:cv2.circle(frame, (x, y), 1, (0, 0, 255), -1)# 绘制正方体12轴for start, end in line_pairs:cv2.line(frame, reprojectdst[start], reprojectdst[end], (0, 0, 255))# 显示角度结果cv2.putText(frame, "X: " + "{:7.2f}".format(euler_angle[0, 0]), (20, 20), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2)cv2.putText(frame, "Y: " + "{:7.2f}".format(euler_angle[1, 0]), (20, 50), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2)cv2.putText(frame, "Z: " + "{:7.2f}".format(euler_angle[2, 0]), (20, 80), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2) # 按q退出提示cv2.putText(frame, "Press 'q': Quit", (20, 450),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (84, 255, 159), 2)# 窗口显示 show with opencvcv2.imshow("Head_Posture", frame)if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头 release cameracap.release()# do a bit of cleanupcv2.destroyAllWindows()if __name__ == '__main__':main()
5.3 打瞌睡判断
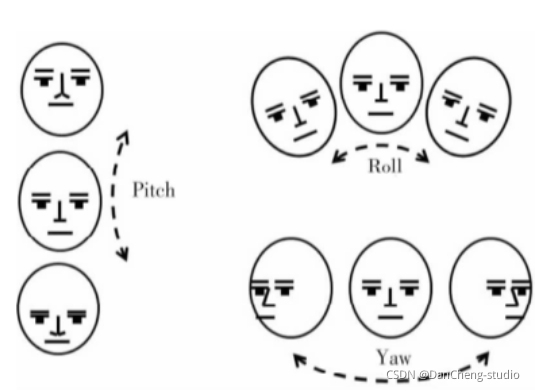
头部姿态判断打瞌睡得到实时头部姿态的旋转角度过后,为头部旋转角度的3个参数Yaw,Pitch和Roll的示意图,驾驶员在打瞌睡时,显然头部会做类似于点头和倾斜的动作.而根据一般人的打瞌睡时表现出来的头部姿态,显然很少会在Yaw上有动作,而主要集中在Pitch和Roll的行为.设定参数阈值为0.3,在一个时间段内10
s内,当I PitchI≥20°或者|Rolll≥20°的时间比例超过0.3时,就认为驾驶员处于打瞌睡的状态,发出预警。
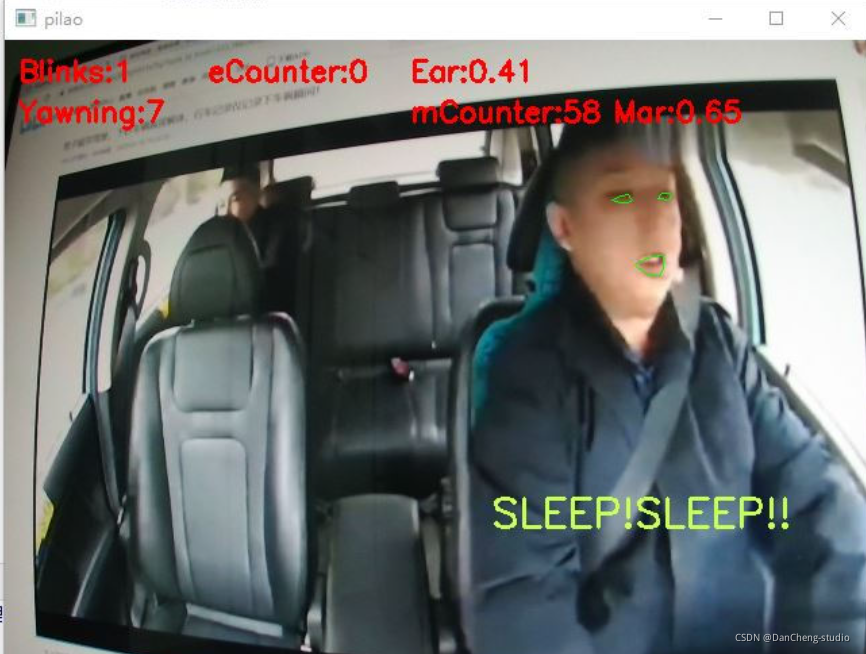
from scipy.spatial import distance as distfrom imutils.video import FileVideoStreamfrom imutils.video import VideoStreamfrom imutils import face_utilsimport numpy as np # 数据处理的库 numpyimport argparseimport imutilsimport timeimport dlibimport cv2import mathimport timefrom threading import Thread,# 世界坐标系(UVW):填写3D参考点,该模型参考http://aifi.isr.uc.pt/Downloads/OpenGL/glAnthropometric3DModel.cppobject_pts = np.float32([[6.825897, 6.760612, 4.402142], #33左眉左上角[1.330353, 7.122144, 6.903745], #29左眉右角[-1.330353, 7.122144, 6.903745], #34右眉左角[-6.825897, 6.760612, 4.402142], #38右眉右上角[5.311432, 5.485328, 3.987654], #13左眼左上角[1.789930, 5.393625, 4.413414], #17左眼右上角[-1.789930, 5.393625, 4.413414], #25右眼左上角[-5.311432, 5.485328, 3.987654], #21右眼右上角[2.005628, 1.409845, 6.165652], #55鼻子左上角[-2.005628, 1.409845, 6.165652], #49鼻子右上角[2.774015, -2.080775, 5.048531], #43嘴左上角[-2.774015, -2.080775, 5.048531],#39嘴右上角[0.000000, -3.116408, 6.097667], #45嘴中央下角[0.000000, -7.415691, 4.070434]])#6下巴角# 相机坐标系(XYZ):添加相机内参K = [6.5308391993466671e+002, 0.0, 3.1950000000000000e+002,0.0, 6.5308391993466671e+002, 2.3950000000000000e+002,0.0, 0.0, 1.0]# 等价于矩阵[fx, 0, cx; 0, fy, cy; 0, 0, 1]# 图像中心坐标系(uv):相机畸变参数[k1, k2, p1, p2, k3]D = [7.0834633684407095e-002, 6.9140193737175351e-002, 0.0, 0.0, -1.3073460323689292e+000]# 像素坐标系(xy):填写凸轮的本征和畸变系数cam_matrix = np.array(K).reshape(3, 3).astype(np.float32)dist_coeffs = np.array(D).reshape(5, 1).astype(np.float32)# 重新投影3D点的世界坐标轴以验证结果姿势reprojectsrc = np.float32([[10.0, 10.0, 10.0],[10.0, 10.0, -10.0],[10.0, -10.0, -10.0],[10.0, -10.0, 10.0],[-10.0, 10.0, 10.0],[-10.0, 10.0, -10.0],[-10.0, -10.0, -10.0],[-10.0, -10.0, 10.0]])# 绘制正方体12轴line_pairs = [[0, 1], [1, 2], [2, 3], [3, 0],[4, 5], [5, 6], [6, 7], [7, 4],[0, 4], [1, 5], [2, 6], [3, 7]]def get_head_pose(shape):# 头部姿态估计# (像素坐标集合)填写2D参考点,注释遵循https://ibug.doc.ic.ac.uk/resources/300-W/# 17左眉左上角/21左眉右角/22右眉左上角/26右眉右上角/36左眼左上角/39左眼右上角/42右眼左上角/# 45右眼右上角/31鼻子左上角/35鼻子右上角/48左上角/54嘴右上角/57嘴中央下角/8下巴角image_pts = np.float32([shape[17], shape[21], shape[22], shape[26], shape[36],shape[39], shape[42], shape[45], shape[31], shape[35],shape[48], shape[54], shape[57], shape[8]])# solvePnP计算姿势——求解旋转和平移矩阵:# rotation_vec表示旋转矩阵,translation_vec表示平移矩阵,cam_matrix与K矩阵对应,dist_coeffs与D矩阵对应。_, rotation_vec, translation_vec = cv2.solvePnP(object_pts, image_pts, cam_matrix, dist_coeffs)# projectPoints重新投影误差:原2d点和重投影2d点的距离(输入3d点、相机内参、相机畸变、r、t,输出重投影2d点)reprojectdst, _ = cv2.projectPoints(reprojectsrc, rotation_vec, translation_vec, cam_matrix,dist_coeffs)reprojectdst = tuple(map(tuple, reprojectdst.reshape(8, 2)))# 以8行2列显示# 计算欧拉角calc euler angle# 参考https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#decomposeprojectionmatrixrotation_mat, _ = cv2.Rodrigues(rotation_vec)#罗德里格斯公式(将旋转矩阵转换为旋转向量)pose_mat = cv2.hconcat((rotation_mat, translation_vec))# 水平拼接,vconcat垂直拼接# decomposeProjectionMatrix将投影矩阵分解为旋转矩阵和相机矩阵_, _, _, _, _, _, euler_angle = cv2.decomposeProjectionMatrix(pose_mat)pitch, yaw, roll = [math.radians(_) for _ in euler_angle]pitch = math.degrees(math.asin(math.sin(pitch)))roll = -math.degrees(math.asin(math.sin(roll)))yaw = math.degrees(math.asin(math.sin(yaw)))print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))return reprojectdst, euler_angle# 投影误差,欧拉角def eye_aspect_ratio(eye):# 垂直眼标志(X,Y)坐标A = dist.euclidean(eye[1], eye[5])# 计算两个集合之间的欧式距离B = dist.euclidean(eye[2], eye[4])# 计算水平之间的欧几里得距离# 水平眼标志(X,Y)坐标C = dist.euclidean(eye[0], eye[3])# 眼睛长宽比的计算ear = (A + B) / (2.0 * C)# 返回眼睛的长宽比return eardef mouth_aspect_ratio(mouth):# 嘴部A = np.linalg.norm(mouth[2] - mouth[9]) # 51, 59B = np.linalg.norm(mouth[4] - mouth[7]) # 53, 57C = np.linalg.norm(mouth[0] - mouth[6]) # 49, 55mar = (A + B) / (2.0 * C)return mar# 定义常数# 眼睛长宽比# 闪烁阈值EYE_AR_THRESH = 0.2EYE_AR_CONSEC_FRAMES = 3# 打哈欠长宽比# 闪烁阈值MAR_THRESH = 0.5MOUTH_AR_CONSEC_FRAMES = 3# 瞌睡点头HAR_THRESH = 0.3NOD_AR_CONSEC_FRAMES = 3# 初始化帧计数器和眨眼总数COUNTER = 0TOTAL = 0# 初始化帧计数器和打哈欠总数mCOUNTER = 0mTOTAL = 0# 初始化帧计数器和点头总数hCOUNTER = 0hTOTAL = 0# 初始化DLIB的人脸检测器(HOG),然后创建面部标志物预测print("[INFO] loading facial landmark predictor...")# 第一步:使用dlib.get_frontal_face_detector() 获得脸部位置检测器detector = dlib.get_frontal_face_detector()# 第二步:使用dlib.shape_predictor获得脸部特征位置检测器predictor = dlib.shape_predictor('D:/myworkspace/JupyterNotebook/fatigue_detecting/model/shape_predictor_68_face_landmarks.dat')# 第三步:分别获取左右眼面部标志的索引(lStart, lEnd) = face_utils.FACIAL_LANDMARKS_IDXS["left_eye"](rStart, rEnd) = face_utils.FACIAL_LANDMARKS_IDXS["right_eye"](mStart, mEnd) = face_utils.FACIAL_LANDMARKS_IDXS["mouth"]# 第四步:打开cv2 本地摄像头cap = cv2.VideoCapture(0)# 从视频流循环帧while True:# 第五步:进行循环,读取图片,并对图片做维度扩大,并进灰度化ret, frame = cap.read()frame = imutils.resize(frame, width=720)gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)# 第六步:使用detector(gray, 0) 进行脸部位置检测rects = detector(gray, 0)# 第七步:循环脸部位置信息,使用predictor(gray, rect)获得脸部特征位置的信息for rect in rects:shape = predictor(gray, rect)# 第八步:将脸部特征信息转换为数组array的格式shape = face_utils.shape_to_np(shape)# 第九步:提取左眼和右眼坐标leftEye = shape[lStart:lEnd]rightEye = shape[rStart:rEnd]# 嘴巴坐标mouth = shape[mStart:mEnd] # 第十步:构造函数计算左右眼的EAR值,使用平均值作为最终的EARleftEAR = eye_aspect_ratio(leftEye)rightEAR = eye_aspect_ratio(rightEye)ear = (leftEAR + rightEAR) / 2.0# 打哈欠mar = mouth_aspect_ratio(mouth)# 第十一步:使用cv2.convexHull获得凸包位置,使用drawContours画出轮廓位置进行画图操作leftEyeHull = cv2.convexHull(leftEye)rightEyeHull = cv2.convexHull(rightEye)cv2.drawContours(frame, [leftEyeHull], -1, (0, 255, 0), 1)cv2.drawContours(frame, [rightEyeHull], -1, (0, 255, 0), 1)mouthHull = cv2.convexHull(mouth)cv2.drawContours(frame, [mouthHull], -1, (0, 255, 0), 1)# 第十二步:进行画图操作,用矩形框标注人脸left = rect.left()top = rect.top()right = rect.right()bottom = rect.bottom()cv2.rectangle(frame, (left, top), (right, bottom), (0, 255, 0), 1) '''分别计算左眼和右眼的评分求平均作为最终的评分,如果小于阈值,则加1,如果连续3次都小于阈值,则表示进行了一次眨眼活动'''# 第十三步:循环,满足条件的,眨眼次数+1if ear < EYE_AR_THRESH:# 眼睛长宽比:0.2COUNTER += 1else:# 如果连续3次都小于阈值,则表示进行了一次眨眼活动if COUNTER >= EYE_AR_CONSEC_FRAMES:# 阈值:3TOTAL += 1# 重置眼帧计数器COUNTER = 0# 第十四步:进行画图操作,同时使用cv2.putText将眨眼次数进行显示cv2.putText(frame, "Faces: {}".format(len(rects)), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) cv2.putText(frame, "COUNTER: {}".format(COUNTER), (150, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) cv2.putText(frame, "EAR: {:.2f}".format(ear), (300, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "Blinks: {}".format(TOTAL), (450, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,0), 2)'''计算张嘴评分,如果小于阈值,则加1,如果连续3次都小于阈值,则表示打了一次哈欠,同一次哈欠大约在3帧'''# 同理,判断是否打哈欠 if mar > MAR_THRESH:# 张嘴阈值0.5mCOUNTER += 1cv2.putText(frame, "Yawning!", (10, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)else:# 如果连续3次都小于阈值,则表示打了一次哈欠if mCOUNTER >= MOUTH_AR_CONSEC_FRAMES:# 阈值:3mTOTAL += 1# 重置嘴帧计数器mCOUNTER = 0cv2.putText(frame, "COUNTER: {}".format(mCOUNTER), (150, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2) cv2.putText(frame, "MAR: {:.2f}".format(mar), (300, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)cv2.putText(frame, "Yawning: {}".format(mTOTAL), (450, 60),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,0), 2)"""瞌睡点头"""# 第十五步:获取头部姿态reprojectdst, euler_angle = get_head_pose(shape)har = euler_angle[0, 0]# 取pitch旋转角度if har > HAR_THRESH:# 点头阈值0.3hCOUNTER += 1else:# 如果连续3次都小于阈值,则表示瞌睡点头一次if hCOUNTER >= NOD_AR_CONSEC_FRAMES:# 阈值:3hTOTAL += 1# 重置点头帧计数器hCOUNTER = 0# 绘制正方体12轴for start, end in line_pairs:cv2.line(frame, reprojectdst[start], reprojectdst[end], (0, 0, 255))# 显示角度结果cv2.putText(frame, "X: " + "{:7.2f}".format(euler_angle[0, 0]), (10, 90), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 255, 0), thickness=2)# GREENcv2.putText(frame, "Y: " + "{:7.2f}".format(euler_angle[1, 0]), (150, 90), cv2.FONT_HERSHEY_SIMPLEX,0.75, (255, 0, 0), thickness=2)# BLUEcv2.putText(frame, "Z: " + "{:7.2f}".format(euler_angle[2, 0]), (300, 90), cv2.FONT_HERSHEY_SIMPLEX,0.75, (0, 0, 255), thickness=2)# RED cv2.putText(frame, "Nod: {}".format(hTOTAL), (450, 90),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,0), 2)# 第十六步:进行画图操作,68个特征点标识for (x, y) in shape:cv2.circle(frame, (x, y), 1, (0, 0, 255), -1)print('嘴巴实时长宽比:{:.2f} '.format(mar)+"\t是否张嘴:"+str([False,True][mar > MAR_THRESH]))print('眼睛实时长宽比:{:.2f} '.format(ear)+"\t是否眨眼:"+str([False,True][COUNTER>=1]))# 确定疲劳提示:眨眼50次,打哈欠15次,瞌睡点头15次if TOTAL >= 50 or mTOTAL>=15 or hTOTAL>=15:cv2.putText(frame, "SLEEP!!!", (100, 200),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 3)# 按q退出cv2.putText(frame, "Press 'q': Quit", (20, 500),cv2.FONT_HERSHEY_SIMPLEX, 0.7, (84, 255, 159), 2)# 窗口显示 show with opencvcv2.imshow("Frame", frame)# if the `q` key was pressed, break from the loopif cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头 release cameracap.release()# do a bit of cleanupcv2.destroyAllWindows()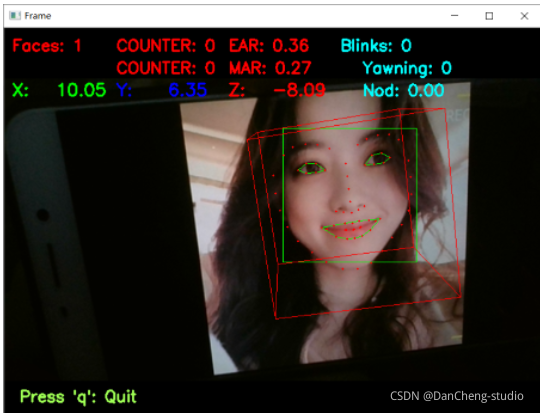
6 基于CNN与SVM的疲劳检测方法
6.1 网络结构
学长将卷积神经网络作为特征提取器, 支持向量机作为分类识别器并通过串联将两者结合 , 构造理想的深度识别模型, 提高对驾驶员疲劳的识别准确率。
本次课题主要以实现提高识别精度为目的, 设计使用的特征提取网络结构中卷积层、 池化层以及全连接层个数均为两层;
在网络的结尾处添加一层支持向量机作为识别分类器;

根据对卷积神经网络的描述, 这里设计使用的网络结构为: 输入层、 二层卷积层、 二层池化层、 二层全连接层以及 SVM
分类器组成的卷积神经网络对采集数据进行实验。
可将网络视为三个部分, 数据输入部分即网络输入层, 为特征提取部分由卷积层和池化层构成, SVM 为分类识别部分; 三部分网络串联出整体识别框架,
且相互间约束不大, 为后续优化工作提供了条件。
6.2 疲劳图像分类训练
网络的训练由于数据量较大进行实验时将数据分为多个批次, 每个批次中含有 20张图像, 经过前向、 反向传播后更新网络参数, 训练出误差合适的网络。 测试时,
图像由网络进行识别, 根据得到的识别正确率来验证网络的可行性。

疲劳驾驶检测需对网络进行训练, 在保证网络训练准确率达到一定精度后即可对图像进行判别; 疲劳驾驶网络训练算法过程如下:
- Step1: 网络初始化: 初始化网络学习率η, 在数值范围[0, 1]中随机初始化网络参数权值及偏置值; 设置网络结构: 卷积核大小为 5×5, 每批次样本数量 20;
- Step2: 随机选择数据库内面部表情图像并依次输入网络, 网络按照送入每一批次的图像进行训练;
- Step3: 网络将训练得到的输出值同图像期望值进行比较, 计算出输出误差;
- Step4: 根据反向传播原理将误差反向传播计算, 并调整网络参数权值和偏置值;
- Step5: 判断迭代次数, 达到期望的迭代步数后转到 Step6, 否则转到 Step3;
- Step6: 将 CNN 提取到的图像特征传入 SVM 中进行训练;
- Step7: 结束。
6.3 训练结果
学长将对建立起的数据集进行实验, 实验中分别在每一批次下对识别正确和错误个数进行统计, 然后同批次中图片数量相比, 得出最终的准确率和损失率(错误率) 。


模型测试结果
7 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛项目 深度学习疲劳驾驶检测 opencv python
文章目录 0 前言1 课题背景2 实现目标3 当前市面上疲劳驾驶检测的方法4 相关数据集5 基于头部姿态的驾驶疲劳检测5.1 如何确定疲劳状态5.2 算法步骤5.3 打瞌睡判断 6 基于CNN与SVM的疲劳检测方法6.1 网络结构6.2 疲劳图像分类训练6.3 训练结果 7 最后 0 前言 🔥 优…...
20.4 HTML 表单
1. form表单 <form>标签: 用于创建一个表单, 通过表单, 用户可以向网站提交数据. 表单可以包含文本输入字段, 复选框, 单选按钮, 下拉列表, 提交按钮等等. 当用户提交表单时, 表单数据会发送到服务器进行处理.action属性: 应指向一个能够处理表单数据的服务器端脚本或UR…...
Linux——基础IO(1)
目录 0. 文件先前理解 1. C文件接口 1.1 写文件 1.2 读文件 1.3 输出信息到显示器 1.4 总结 and stdin & stdout & stderr 2. 系统调用文件I/O 2.1 系统接口使用示例 2.2 接口介绍 2.3 open函数返回值 3. 文件描述符fd及重定向 3.1 0 & 1 & 2 3.2…...

MFC第二十七天 通过动态链表实现游戏角色动态增加、WM_ERASEBKGND背景刷新的原理、RegisterClass注册窗口与框架程序开发
文章目录 通过动态链表实现游戏角色动态增加CMemoryDC.hCFlashDlg.hCFlashDlg.cpp WM_ERASEBKGND背景刷新的原理RegisterClass注册窗口与框架程序开发CFrameRegister 通过动态链表实现游戏角色动态增加 CMemoryDC.h #pragma once#include "resource.h"/*内存DC类简介…...

Debezium系列之:基于内容路由实现把数据库表中的数据按照数据类型分发到不同的topic
Debezium系列之:基于内容路由实现把数据库表中的数据按照数据类型分发到不同的topic 一、需求背景二、创建表三、插入、更新、删除数据四、核心参数和实现技术五、查看分发的Topic六、消费Topic数据七、总结和延展一、需求背景 一张表中存有各个超市门店的订单信息,例如超市门…...

苹果账号被禁用怎么办?
苹果账号被禁用怎么办? 转载:苹果账号被禁用怎么办? 当我们使用苹果手机登录App Store时,有时会遇到账号被禁用的提示。总结下来, 账号被禁用的原因可能有以下几种: 禁用的原因 1.在不同的设备上登录Ap…...

文章一:快速上手Git - 从零到一:Git版本控制入门指南
开始本篇文章之前先推荐一个好用的学习工具,AIRIght,借助于AI助手工具,学习事半功倍。欢迎访问:http://airight.fun/。 概述 在软件开发和团队协作中,版本控制是一项至关重要的技术。Git作为现代开发者最喜爱的版本控…...

【用unity实现100个游戏之6】制作一个战旗自走棋类游戏(附源码)
文章目录 前言导入素材开始1. 设置瓦片间隙2. 放置全图瓦片3. 美化瓦片地图4. 添加树木障碍物5. 设定不同的排序图层6. 瓦片交互6. 瓦片交互优化6. 瓦片是否允许角色7. 添加角色8. 新增游戏管理脚本9. 角色移动范围逻辑10. 角色移动范围可视化11. 角色移动12. 重置瓦片颜色12. …...
W5100S-EVB-PICO 做TCP Server进行回环测试(六)
前言 上一章我们用W5100S-EVB-PICO开发板做TCP 客户端连接服务器进行数据回环测试,那么本章将用开发板做TCP服务器来进行数据回环测试。 TCP是什么?什么是TCP Server?能干什么? TCP (Transmission Control Protocol) 是一种面向连…...

dinput8.dll导致游戏打不开的解决方法,快速修复dinput8.dll文件
当你尝试启动某个游戏时,如果遇到dinput8.dll文件缺失或损坏的错误提示,可能会导致游戏无法正常运行。dinput8.dll是DirectInput API的一部分,它提供了游戏手柄、键盘和鼠标等输入设备的支持。本文将详细介绍dinput8.dll的作用、导致游戏无法…...

NAS相关
Debian11 更换软件源 备份 #备份软件源列表 cp /etc/apt/sources.list /etc/apt/sources.list.bak编辑sources.list nano /etc/apt/sources.list替换文件内容 deb http://mirrors.163.com/debian/ bullseye main non-free contrib deb http://mirrors.163.com/debian/ bull…...

26.Netty源码之ThreadLocal
highlight: arduino-light JDK ThreadLocal 如果你需要变量在多线程之间隔离,或者在同线程内的类和方法中共享,那么 ThreadLocal 大显身手的时候就到了。ThreadLocal 可以理解为线程本地变量,它是 Java 并发编程中非常重要的一个类。 ThreadL…...
Mysql SUBSTRING_INDEX - 按分隔符截取字符串
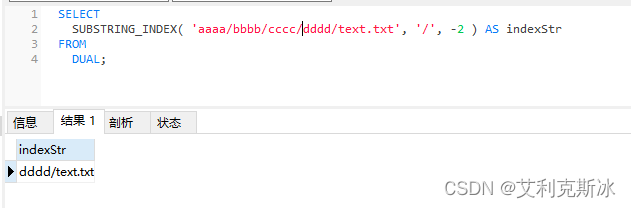
作用: 按分隔符截取字符串 语法: SUBSTRING_INDEX(str, delimiter, count) 属性: 参数说明str必需的。一个字符串。delimiter必需的。分隔符定义,是大小写敏感,且是多字节安全的count必须的。大于0或者小于0的数值…...

封装Ellipsis组件,亲测使用各种场景
自己封装了Ellipsis组件 基于reacttaro,以下是实现代码,分为JSX和CSS文件 JSX代码如下: import { FC, Fragment, JSX, useState } from react; import { Image, StandardProps, Text, View } from tarojs/components;import iconDropDown fr…...
Kendo UI for jQuery,一个现代的jQuery UI组件!
Kendo UI for jQuery是什么? Kendo UI for jQuery是完整的jQuery UI组件库,可快速构建出色的高性能响应式Web应用程序。Kendo UI for jQuery提供在短时间内构建现代Web应用程序所需要的工具,从多个UI组件中选择,并轻松地将它们组…...

C++初阶语法——类和对象
前言:C语言中的结构体,在C有着更高位替代者——类。而类的实例化叫做对象。 本篇文章不定期更新扩展后续内容。 目录 一.面向过程和面向对象初步认识二.类1.C中的结构体2.类的定义类的两种定义方式 3.类的访问限定符及封装访问限定符说明 4.类的实例化对…...
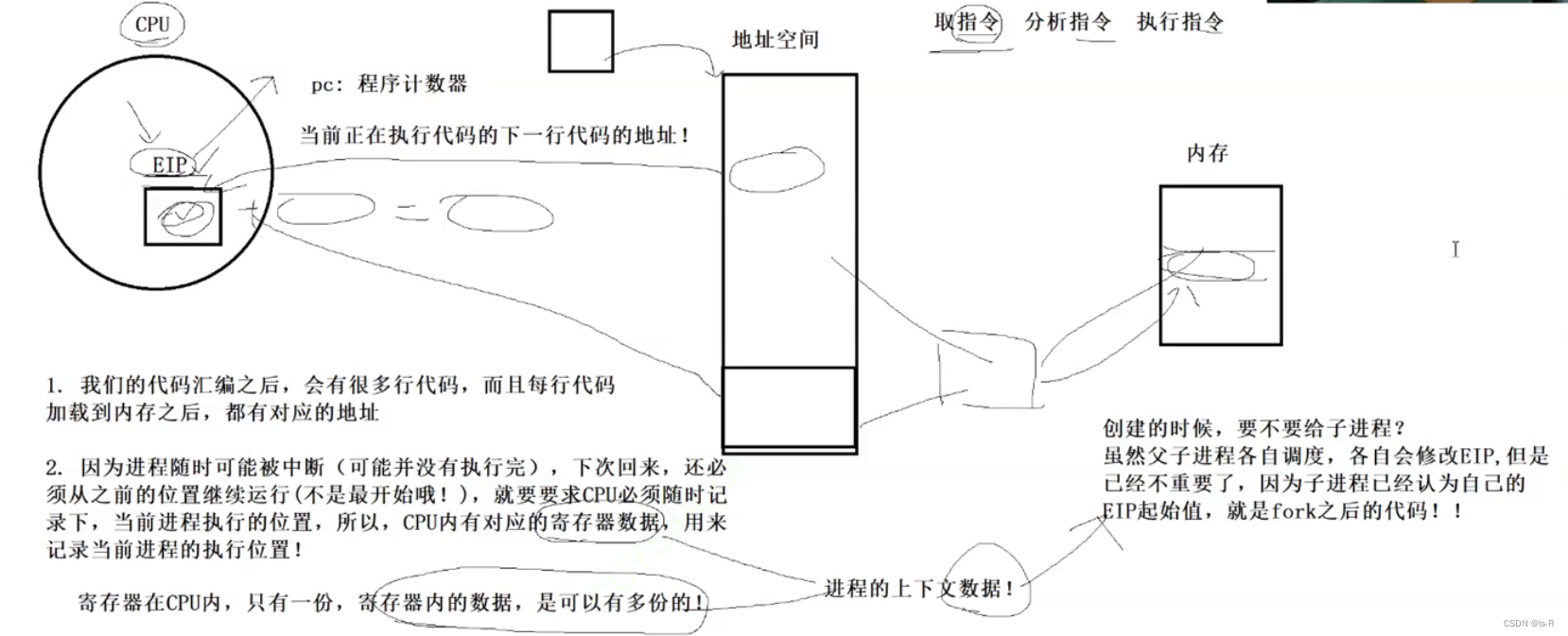
linux学习(进程创建)[8]
创建进程 myproc.c #include <stdio.h> #include <unistd.h>int main() {printf("我是父进程\n");pid_t id fork();if(id < 0){printf("创建子进程失败\n");return 1;}else if(id 0){while(1){printf("我是子进程: pid…...

Linux基础与应用开发系列九:各类系统函数
open_close函数 OPEN函数 头文件: #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> 函数原型: 当文件存在时 int open(const char* pathname,int flags) 当文件不存在时 int open (const char* pathname,int f…...

国产数据库排行
目录 一、理论 1.国产数据库排行 2.数据 一、理论 1.国产数据库排行 (1)墨天轮榜单 墨天轮国产数据库流行度排行于2019年6月推出,通过近50个维度的数据来考察近300个国产数据库的流行度排行,每月1日更新排行数据,…...
数学符号说明——三角等号(≜)
三角等号 ,LaTex语法宏 (\triangleq),Unicode(U225C),又称 "delta equal to(Δ 等)"。可以读作 "等于"、"根据定义 x 等于 y "。 有时候,用在数学(和物理学)的某种定义中。例如&#…...

如何快速获取B站视频?bilibili-parse视频解析工具完整指南
如何快速获取B站视频?bilibili-parse视频解析工具完整指南 【免费下载链接】bilibili-parse bilibili Video API 项目地址: https://gitcode.com/gh_mirrors/bi/bilibili-parse 你是否经常想要保存B站的精彩视频,却被复杂的编号格式和画质选项困扰…...
)
别再瞎改堆栈大小了!手把手教你分析STM32的.map文件,精准优化内存(附GCC/MDK对比)
STM32内存优化实战:从.map文件解析到精准堆栈调整 在嵌入式开发中,内存管理一直是工程师们面临的棘手问题。当你的STM32项目逐渐复杂,各种全局变量、静态数组和递归调用开始占据宝贵的RAM空间时,突然出现的HardFault或莫名奇妙的数…...

IDM试用重置工具:告别30天限制的智能解决方案
IDM试用重置工具:告别30天限制的智能解决方案 【免费下载链接】idm-trial-reset Use IDM forever without cracking 项目地址: https://gitcode.com/gh_mirrors/id/idm-trial-reset 你是否曾经遇到过这样的情况:正在下载重要文件时,ID…...

如何5分钟上手QtScrcpy:Android设备跨平台投屏与键鼠控制完全指南
如何5分钟上手QtScrcpy:Android设备跨平台投屏与键鼠控制完全指南 【免费下载链接】QtScrcpy Android实时投屏软件,此应用程序提供USB(或通过TCP/IP)连接的Android设备的显示和控制。它不需要任何root访问权限 项目地址: https://gitcode.com/barry-ra…...

3步彻底解决Cursor试用限制:go-cursor-help工具完全指南
3步彻底解决Cursor试用限制:go-cursor-help工具完全指南 【免费下载链接】go-cursor-help 解决Cursor在免费订阅期间出现以下提示的问题: Your request has been blocked as our system has detected suspicious activity / Youve reached your trial request limit…...
)
【紧急预警】PHP 9.0协程调度器重大变更!AI聊天机器人状态同步失效风险清单(含7个必修迁移checklist)
更多请点击: https://intelliparadigm.com 第一章:PHP 9.0异步编程与AI聊天机器人对比评测报告的定位与价值 本报告聚焦于 PHP 生态演进的关键拐点——PHP 9.0(预发布技术白皮书阶段)所引入的原生协程调度器(Swoole-n…...

如何用Winhance中文版实现Windows系统全面优化:从新手到高手的5个实用技巧
如何用Winhance中文版实现Windows系统全面优化:从新手到高手的5个实用技巧 【免费下载链接】Winhance-zh_CN A Chinese version of Winhance. C# application designed to optimize and customize your Windows experience. 项目地址: https://gitcode.com/gh_mir…...

Windows 10系统优化配置指南:开源工具的技术实现与应用
Windows 10系统优化配置指南:开源工具的技术实现与应用 【免费下载链接】Win10BloatRemover Configurable CLI tool to easily and aggressively debloat and tweak Windows 10 by removing preinstalled UWP apps, services and more. Originally based on the W10…...
)
UE5多人游戏开发避坑指南:从零配置Steam联机插件到打包测试(含SDK问题解决)
UE5多人游戏开发实战:Steam联机插件配置与疑难解析 第一次打开虚幻引擎5的多人游戏模板时,那种跃跃欲试的兴奋感很快会被各种配置问题浇灭。我清楚地记得自己第一次尝试配置Steam联机插件时,花了整整三天时间才让两个客户端成功建立连接。本文…...

Claude 代码版权归属成谜,开发者如何应对 AI 代码版权三大难题?
鲜为人知的版权规则 简单来说,法律底线是:版权只保护人类创作的作品。美国版权局一直坚持这一观点,哥伦比亚特区巡回上诉法院在 Thaler 案中也支持了这一立场。2026 年 3 月,最高法院拒绝审理 Thaler 案的上诉,但这并不…...