yolov5目标检测多线程Qt界面
上一篇文章:yolov5目标检测多线程C++部署
V1 基本功能实现
mainwindow.h
#pragma once#include <iostream>#include <QMainWindow>
#include <QFileDialog>
#include <QThread>#include <opencv2/opencv.hpp>#include "yolov5.h"
#include "blockingconcurrentqueue.h"QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
using namespace moodycamel;
QT_END_NAMESPACEclass Infer1 : public QThread
{Q_OBJECTpublic slots:void receive_image(){};private:void run();private:
cv::Mat input_image;
cv::Mat blob;
cv::Mat output_image;
std::vector<cv::Mat> network_outputs;signals:void send_image();
};class Infer2 : public QThread
{Q_OBJECTpublic slots:void receive_image(){};private:void run();private:
cv::Mat input_image;
cv::Mat blob;
cv::Mat output_image;
std::vector<cv::Mat> network_outputs;signals:void send_image();
};class MainWindow : public QMainWindow
{Q_OBJECTpublic:MainWindow(QWidget *parent = nullptr);~MainWindow();private slots:void on_pushButton_open_video_clicked();void receive_image();private:Ui::MainWindow *ui;Infer1 *infer1;Infer2 *infer2;signals:void send_image();
};
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"bool stop = false;
BlockingConcurrentQueue<cv::Mat> bcq_capture1, bcq_infer1;
BlockingConcurrentQueue<cv::Mat> bcq_capture2, bcq_infer2;void print_time(int id)
{auto now = std::chrono::system_clock::now();uint64_t dis_millseconds = std::chrono::duration_cast<std::chrono::milliseconds>(now.time_since_epoch()).count()- std::chrono::duration_cast<std::chrono::seconds>(now.time_since_epoch()).count() * 1000;time_t tt = std::chrono::system_clock::to_time_t(now);auto time_tm = localtime(&tt);char time[100] = { 0 };sprintf(time, "%d-%02d-%02d %02d:%02d:%02d %03d", time_tm->tm_year + 1900,time_tm->tm_mon + 1, time_tm->tm_mday, time_tm->tm_hour,time_tm->tm_min, time_tm->tm_sec, (int)dis_millseconds);std::cout << "infer" << std::to_string(id) << " 当前时间为:" << time << std::endl;
}void Infer1::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5n-w640h352.onnx");while (true){if(stop) break;if(bcq_capture1.try_dequeue(input_image)){pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);bcq_infer1.enqueue(output_image);emit send_image();print_time(1);}}
}void Infer2::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5s-w640h352.onnx");while (true){if(stop) break;if(bcq_capture2.try_dequeue(input_image)){pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);bcq_infer2.enqueue(output_image);emit send_image();print_time(2);}}
}MainWindow::MainWindow(QWidget *parent): QMainWindow(parent), ui(new Ui::MainWindow)
{ui->setupUi(this);infer1 = new Infer1;infer2 = new Infer2;connect(infer1, &Infer1::send_image, this, &MainWindow::receive_image);connect(infer2, &Infer2::send_image, this, &MainWindow::receive_image);
}MainWindow::~MainWindow()
{delete ui;
}void MainWindow::receive_image()
{cv::Mat output_image;if(bcq_infer1.try_dequeue(output_image)){QImage image = QImage((const uchar*)output_image.data, output_image.cols, output_image.rows, QImage::Format_RGB888).rgbSwapped();ui->label_1->clear();ui->label_1->setPixmap(QPixmap::fromImage(image));ui->label_1->show();}if(bcq_infer2.try_dequeue(output_image)){QImage image = QImage((const uchar*)output_image.data, output_image.cols, output_image.rows, QImage::Format_RGB888).rgbSwapped();ui->label_2->clear();ui->label_2->setPixmap(QPixmap::fromImage(image));ui->label_2->show();}
}void MainWindow::on_pushButton_open_video_clicked()
{QString qstr = QFileDialog::getOpenFileName(this, tr("Open Video"), "", tr("(*.mp4 *.avi *.mkv)"));if(qstr.isEmpty()) return;infer1->start();infer2->start();cv::VideoCapture cap;cap.open(qstr.toStdString());while (cv::waitKey(1) < 0){cv::Mat frame;cap.read(frame);if (frame.empty()){stop = true;break;}bcq_capture1.enqueue(frame);bcq_capture2.enqueue(frame);}
}
这里引入的第三方库moodycamel::ConcurrentQueue是一个用C++11实现的多生产者、多消费者无锁队列。
程序输出:
infer1 当前时间为:2023-08-12 13:17:14 402
infer2 当前时间为:2023-08-12 13:17:14 424
infer1 当前时间为:2023-08-12 13:17:14 448
infer2 当前时间为:2023-08-12 13:17:14 480
infer1 当前时间为:2023-08-12 13:17:14 494
infer2 当前时间为:2023-08-12 13:17:14 532
infer1 当前时间为:2023-08-12 13:17:14 544
infer2 当前时间为:2023-08-12 13:17:14 586
infer1 当前时间为:2023-08-12 13:17:14 590
infer1 当前时间为:2023-08-12 13:17:14 637
infer2 当前时间为:2023-08-12 13:17:14 645
infer1 当前时间为:2023-08-12 13:17:14 678
infer2 当前时间为:2023-08-12 13:17:14 702
infer1 当前时间为:2023-08-12 13:17:14 719
infer2 当前时间为:2023-08-12 13:17:14 758
infer1 当前时间为:2023-08-12 13:17:14 760
infer1 当前时间为:2023-08-12 13:17:14 808
infer2 当前时间为:2023-08-12 13:17:14 817
infer1 当前时间为:2023-08-12 13:17:14 852
infer2 当前时间为:2023-08-12 13:17:14 881
...
界面效果:

可以看到,上面的程序实现了两个模型的多线程推理,但由于不同模型推理速度有差异,导致画面显示不同步。另外,把读取视频帧的实现写入主线程时,一旦视频帧读取结束则无法处理后面的帧,导致显示卡死。
V2 修正画面不同步问题
mainwindow.h
#pragma once#include <iostream>#include <QMainWindow>
#include <QFileDialog>
#include <QThread>#include <opencv2/opencv.hpp>#include "yolov5.h"
#include "blockingconcurrentqueue.h"QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
using namespace moodycamel;
QT_END_NAMESPACEclass Capture : public QThread
{Q_OBJECTpublic:void set_video(QString video){cap.open(video.toStdString());}private:void run();private:cv::VideoCapture cap;
};class Infer1 : public QThread
{Q_OBJECTpublic slots:void receive_image(){};private:void run();private:
cv::Mat input_image;
cv::Mat blob;
cv::Mat output_image;
std::vector<cv::Mat> network_outputs;signals:void send_image();
};class Infer2 : public QThread
{Q_OBJECTpublic slots:void receive_image(){};private:void run();private:
cv::Mat input_image;
cv::Mat blob;
cv::Mat output_image;
std::vector<cv::Mat> network_outputs;signals:void send_image();
};class MainWindow : public QMainWindow
{Q_OBJECTpublic:MainWindow(QWidget *parent = nullptr);~MainWindow();private slots:void on_pushButton_open_video_clicked();void receive_image();private:Ui::MainWindow *ui; QString video;Capture *capture;Infer1 *infer1;Infer2 *infer2;signals:void send_image();
};
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"bool stop = false;
BlockingConcurrentQueue<cv::Mat> bcq_capture1, bcq_infer1;
BlockingConcurrentQueue<cv::Mat> bcq_capture2, bcq_infer2;void print_time(int id)
{auto now = std::chrono::system_clock::now();uint64_t dis_millseconds = std::chrono::duration_cast<std::chrono::milliseconds>(now.time_since_epoch()).count()- std::chrono::duration_cast<std::chrono::seconds>(now.time_since_epoch()).count() * 1000;time_t tt = std::chrono::system_clock::to_time_t(now);auto time_tm = localtime(&tt);char time[100] = { 0 };sprintf(time, "%d-%02d-%02d %02d:%02d:%02d %03d", time_tm->tm_year + 1900,time_tm->tm_mon + 1, time_tm->tm_mday, time_tm->tm_hour,time_tm->tm_min, time_tm->tm_sec, (int)dis_millseconds);std::cout << "infer" << std::to_string(id) << " 当前时间为:" << time << std::endl;
}void Capture::run()
{while (cv::waitKey(50) < 0){cv::Mat frame;cap.read(frame);if (frame.empty()){stop = true;break;}bcq_capture1.enqueue(frame);bcq_capture2.enqueue(frame);}
}void Infer1::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5n-w640h352.onnx");while (true){if(stop) break;if(bcq_capture1.try_dequeue(input_image)){pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);bcq_infer1.enqueue(output_image);emit send_image();print_time(1);}}
}void Infer2::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5s-w640h352.onnx");while (true){if(stop) break;if(bcq_capture2.try_dequeue(input_image)){pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);bcq_infer2.enqueue(output_image);emit send_image();print_time(2);}}
}MainWindow::MainWindow(QWidget *parent): QMainWindow(parent), ui(new Ui::MainWindow)
{ui->setupUi(this);capture = new Capture;infer1 = new Infer1;infer2 = new Infer2;connect(infer1, &Infer1::send_image, this, &MainWindow::receive_image);connect(infer2, &Infer2::send_image, this, &MainWindow::receive_image);
}MainWindow::~MainWindow()
{delete ui;
}void MainWindow::receive_image()
{cv::Mat output_image;if(bcq_infer1.try_dequeue(output_image)){QImage image = QImage((const uchar*)output_image.data, output_image.cols, output_image.rows, QImage::Format_RGB888).rgbSwapped();ui->label_1->clear();ui->label_1->setPixmap(QPixmap::fromImage(image));ui->label_1->show();}if(bcq_infer2.try_dequeue(output_image)){QImage image = QImage((const uchar*)output_image.data, output_image.cols, output_image.rows, QImage::Format_RGB888).rgbSwapped();ui->label_2->clear();ui->label_2->setPixmap(QPixmap::fromImage(image));ui->label_2->show();}
}void MainWindow::on_pushButton_open_video_clicked()
{video = QFileDialog::getOpenFileName(this, tr("Open Video"), "", tr("(*.mp4 *.avi *.mkv)"));if(video.isEmpty()) return;capture->set_video(video);capture->start();infer1->start();infer2->start();
}
界面显示:

V3 修正视频播放完成界面显示问题
和V2比较,V3的改动不大,仅增加在视频播放完成时发出信号调用清除界面显示的功能。
mainwindow.h
#pragma once#include <iostream>#include <QMainWindow>
#include <QFileDialog>
#include <QThread>#include <opencv2/opencv.hpp>#include "yolov5.h"
#include "blockingconcurrentqueue.h"QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
using namespace moodycamel;
QT_END_NAMESPACEclass Capture : public QThread
{Q_OBJECTpublic:void set_video(QString video){cap.open(video.toStdString());}private:void run();private:cv::VideoCapture cap;signals:void stop();
};class Infer1 : public QThread
{Q_OBJECTprivate:void run();private:
cv::Mat input_image;
cv::Mat blob;
cv::Mat output_image;
std::vector<cv::Mat> network_outputs;signals:void send_image();
};class Infer2 : public QThread
{Q_OBJECTprivate:void run();private:
cv::Mat input_image;
cv::Mat blob;
cv::Mat output_image;
std::vector<cv::Mat> network_outputs;signals:void send_image();
};class MainWindow : public QMainWindow
{Q_OBJECTpublic:MainWindow(QWidget *parent = nullptr);~MainWindow();private slots:void on_pushButton_open_video_clicked();void receive_image();void clear_image();private:Ui::MainWindow *ui; QString video;Capture *capture;Infer1 *infer1;Infer2 *infer2;
};
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"bool flag = false;
BlockingConcurrentQueue<cv::Mat> bcq_capture1, bcq_infer1;
BlockingConcurrentQueue<cv::Mat> bcq_capture2, bcq_infer2;void print_time(int id)
{auto now = std::chrono::system_clock::now();uint64_t dis_millseconds = std::chrono::duration_cast<std::chrono::milliseconds>(now.time_since_epoch()).count()- std::chrono::duration_cast<std::chrono::seconds>(now.time_since_epoch()).count() * 1000;time_t tt = std::chrono::system_clock::to_time_t(now);auto time_tm = localtime(&tt);char time[100] = { 0 };sprintf(time, "%d-%02d-%02d %02d:%02d:%02d %03d", time_tm->tm_year + 1900,time_tm->tm_mon + 1, time_tm->tm_mday, time_tm->tm_hour,time_tm->tm_min, time_tm->tm_sec, (int)dis_millseconds);std::cout << "infer" << std::to_string(id) << " 当前时间为:" << time << std::endl;
}void Capture::run()
{while (cv::waitKey(50) < 0){cv::Mat frame;cap.read(frame);if (frame.empty()){flag = true;emit stop();break;}bcq_capture1.enqueue(frame);bcq_capture2.enqueue(frame);}
}void Infer1::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5n-w640h352.onnx");while (true){if(flag) break;if(bcq_capture1.try_dequeue(input_image)){pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);bcq_infer1.enqueue(output_image);emit send_image();print_time(1);}std::this_thread::yield();}
}void Infer2::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5s-w640h352.onnx");while (true){if(flag) break;if(bcq_capture2.try_dequeue(input_image)){pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);bcq_infer2.enqueue(output_image);emit send_image();print_time(2);}std::this_thread::yield();}
}MainWindow::MainWindow(QWidget *parent): QMainWindow(parent), ui(new Ui::MainWindow)
{ui->setupUi(this);capture = new Capture;infer1 = new Infer1;infer2 = new Infer2;connect(infer1, &Infer1::send_image, this, &MainWindow::receive_image);connect(infer2, &Infer2::send_image, this, &MainWindow::receive_image);connect(capture, &Capture::stop, this, &MainWindow::clear_image);
}MainWindow::~MainWindow()
{delete ui;
}void MainWindow::on_pushButton_open_video_clicked()
{video = QFileDialog::getOpenFileName(this, tr("Open Video"), "", tr("(*.mp4 *.avi *.mkv)"));if(video.isEmpty()) return;capture->set_video(video);capture->start();infer1->start();infer2->start();
}void MainWindow::receive_image()
{cv::Mat output_image;if(bcq_infer1.try_dequeue(output_image)){QImage image = QImage((const uchar*)output_image.data, output_image.cols, output_image.rows, QImage::Format_RGB888).rgbSwapped();ui->label_1->clear();ui->label_1->setPixmap(QPixmap::fromImage(image));ui->label_1->show();}if(bcq_infer2.try_dequeue(output_image)){QImage image = QImage((const uchar*)output_image.data, output_image.cols, output_image.rows, QImage::Format_RGB888).rgbSwapped();ui->label_2->clear();ui->label_2->setPixmap(QPixmap::fromImage(image));ui->label_2->show();}
}void MainWindow::clear_image()
{ui->label_1->clear();ui->label_2->clear();
}
V4 通过Qt自带QThread、QMutex、QWaitCondition实现
mainwindow.h
#pragma once#include <iostream>#include <QMainWindow>
#include <QFileDialog>
#include <QThread>
#include <QMutex>
#include <QWaitCondition>#include <opencv2/opencv.hpp>#include "yolov5.h"QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACEclass Capture : public QThread
{Q_OBJECTpublic:void set_video(QString video){cap.open(video.toStdString());}private:void run();private:cv::VideoCapture cap;signals:void stop();
};class Infer1 : public QThread
{Q_OBJECTpublic:void set_model(QString model){net = cv::dnn::readNet(model.toStdString());}private:void run();private:cv::dnn::Net net;cv::Mat input_image;cv::Mat blob;cv::Mat output_image;std::vector<cv::Mat> network_outputs;signals:void send_image();void stop();
};class Infer2 : public QThread
{Q_OBJECTpublic:void set_model(QString model){net = cv::dnn::readNet(model.toStdString());}private:void run();private:cv::dnn::Net net;cv::Mat input_image;cv::Mat blob;cv::Mat output_image;std::vector<cv::Mat> network_outputs;signals:void send_image();void stop();
};class MainWindow : public QMainWindow
{Q_OBJECTpublic:MainWindow(QWidget *parent = nullptr);~MainWindow();private slots:void on_pushButton_open_video_clicked();void receive_image();void clear_image();private:Ui::MainWindow *ui; QString video;Capture *capture;Infer1 *infer1;Infer2 *infer2;
};
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"bool video_end = false;
QMutex mutex1, mutex2;
QWaitCondition qwc1, qwc2;
cv::Mat g_frame1, g_frame2;
cv::Mat g_result1, g_result2;void print_time(int id)
{auto now = std::chrono::system_clock::now();uint64_t dis_millseconds = std::chrono::duration_cast<std::chrono::milliseconds>(now.time_since_epoch()).count()- std::chrono::duration_cast<std::chrono::seconds>(now.time_since_epoch()).count() * 1000;time_t tt = std::chrono::system_clock::to_time_t(now);auto time_tm = localtime(&tt);char time[100] = { 0 };sprintf(time, "%d-%02d-%02d %02d:%02d:%02d %03d", time_tm->tm_year + 1900,time_tm->tm_mon + 1, time_tm->tm_mday, time_tm->tm_hour,time_tm->tm_min, time_tm->tm_sec, (int)dis_millseconds);std::cout << "infer" << std::to_string(id) << " 当前时间为:" << time << std::endl;
}void Capture::run()
{while (cv::waitKey(1) < 0){cv::Mat frame;cap.read(frame);if (frame.empty()){video_end = true;cap.release();emit stop();break;}g_frame1 = frame;qwc1.wakeAll();g_frame2 = frame;qwc2.wakeAll();}
}void Infer1::run()
{while (true){if(video_end){emit stop();break;}mutex1.lock();qwc1.wait(&mutex1);input_image = g_frame1;pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);g_result1 = output_image;emit send_image();mutex1.unlock();print_time(1);}
}void Infer2::run()
{while (true){if(video_end){emit stop();break;}mutex2.lock();qwc2.wait(&mutex2);input_image = g_frame2;pre_process(input_image, blob);process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);g_result2 = output_image;emit send_image();mutex2.unlock();print_time(2);}
}MainWindow::MainWindow(QWidget *parent): QMainWindow(parent), ui(new Ui::MainWindow)
{ui->setupUi(this);capture = new Capture;infer1 = new Infer1;infer2 = new Infer2;connect(capture, &Capture::stop, this, &MainWindow::clear_image);connect(infer1, &Infer1::send_image, this, &MainWindow::receive_image);connect(infer1, &Infer1::stop, this, &MainWindow::clear_image);connect(infer2, &Infer2::send_image, this, &MainWindow::receive_image);connect(infer2, &Infer2::stop, this, &MainWindow::clear_image);
}MainWindow::~MainWindow()
{delete ui;
}void MainWindow::on_pushButton_open_video_clicked()
{video = QFileDialog::getOpenFileName(this, tr("Open Video"), "", tr("(*.mp4 *.avi *.mkv)"));if(video.isEmpty()) return;video_end = false;capture->set_video(video);infer1->set_model("yolov5n-w640h352.onnx");infer2->set_model("yolov5s-w640h352.onnx");capture->start();infer1->start();infer2->start();
}void MainWindow::receive_image()
{QImage image1 = QImage((const uchar*)g_result1.data, g_result1.cols, g_result1.rows, QImage::Format_RGB888).rgbSwapped();ui->label_1->clear();ui->label_1->setPixmap(QPixmap::fromImage(image1));ui->label_1->show();QImage image2 = QImage((const uchar*)g_result2.data, g_result2.cols, g_result2.rows, QImage::Format_RGB888).rgbSwapped();ui->label_2->clear();ui->label_2->setPixmap(QPixmap::fromImage(image2));ui->label_2->show();
}void MainWindow::clear_image()
{ui->label_1->clear();ui->label_2->clear();capture->quit();infer1->quit();infer2->quit();
}
V5 通过std::mutex、std::condition_variable、std::promise实现
mainwindow.h
#pragma once#include <iostream>
#include <string>
#include <queue>
#include <thread>
#include <mutex>
#include <condition_variable>
#include <future>
#include <ctime>
#include <windows.h>#include <QMainWindow>
#include <QFileDialog>
#include <QThread>
#include <QMutex>
#include <QWaitCondition>#include <opencv2/opencv.hpp>#include "yolov5.h"QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACEclass Capture : public QThread
{Q_OBJECTpublic:void set_capture(QString video){cap.open(video.toStdString());}private:void run();private:cv::VideoCapture cap;signals:void show();void stop();
};class Infer1 : public QThread
{Q_OBJECTpublic:void set_model(QString model){net = cv::dnn::readNet(model.toStdString());}private:void run();private:cv::dnn::Net net;cv::Mat input_image;cv::Mat blob;cv::Mat output_image;std::vector<cv::Mat> network_outputs;
};class Infer2 : public QThread
{Q_OBJECTpublic:void set_model(QString model){net = cv::dnn::readNet(model.toStdString());}private:void run();private:cv::dnn::Net net;cv::Mat input_image;cv::Mat blob;cv::Mat output_image;std::vector<cv::Mat> network_outputs;
};class MainWindow : public QMainWindow
{Q_OBJECTpublic:MainWindow(QWidget *parent = nullptr);~MainWindow();private slots:void receive_image();void clear_image();void on_pushButton_open_video_clicked();private:Ui::MainWindow *ui; QString video;Capture *capture;Infer1 *infer1;Infer2 *infer2;
};
mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"struct Job
{cv::Mat input_image;std::shared_ptr<std::promise<cv::Mat>> output_image;
};std::queue<Job> jobs1, jobs2;std::mutex lock1, lock2;std::condition_variable cv1, cv2;cv::Mat result1, result2;const int limit = 10;bool video_end = false;void print_time(int id)
{auto now = std::chrono::system_clock::now();uint64_t dis_millseconds = std::chrono::duration_cast<std::chrono::milliseconds>(now.time_since_epoch()).count()- std::chrono::duration_cast<std::chrono::seconds>(now.time_since_epoch()).count() * 1000;time_t tt = std::chrono::system_clock::to_time_t(now);auto time_tm = localtime(&tt);char time[100] = { 0 };sprintf(time, "%d-%02d-%02d %02d:%02d:%02d %03d", time_tm->tm_year + 1900,time_tm->tm_mon + 1, time_tm->tm_mday, time_tm->tm_hour,time_tm->tm_min, time_tm->tm_sec, (int)dis_millseconds);std::cout << "infer" << std::to_string(id) << ": 当前时间为:" << time << std::endl;
}void Capture::run()
{while (cv::waitKey(1) < 0){Job job1, job2;cv::Mat frame;cap.read(frame);if (frame.empty()){video_end = true;emit stop();break;}{std::unique_lock<std::mutex> l1(lock1);cv1.wait(l1, [&]() { return jobs1.size()<limit; });job1.input_image = frame;job1.output_image.reset(new std::promise<cv::Mat>());jobs1.push(job1);}{std::unique_lock<std::mutex> l2(lock2);cv1.wait(l2, [&]() { return jobs2.size() < limit; });job2.input_image = frame;job2.output_image.reset(new std::promise<cv::Mat>());jobs2.push(job2);}result1 = job1.output_image->get_future().get();result2 = job2.output_image->get_future().get();emit show();}
}void Infer1::run()
{while (true){if (video_end)break; //不加线程无法退出if (!jobs1.empty()){std::lock_guard<std::mutex> l1(lock1);auto job = jobs1.front();jobs1.pop();cv1.notify_all();cv::Mat input_image = job.input_image, blob, output_image;pre_process(input_image, blob);std::vector<cv::Mat> network_outputs;process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);job.output_image->set_value(output_image);print_time(0);}std::this_thread::yield(); //不加线程无法退出}
}void Infer2::run()
{cv::dnn::Net net = cv::dnn::readNet("yolov5s-w640h352.onnx");while (true){if (video_end)break;if (!jobs2.empty()){std::lock_guard<std::mutex> l2(lock2);auto job = jobs2.front();jobs2.pop();cv2.notify_all();cv::Mat input_image = job.input_image, blob, output_image;pre_process(input_image, blob);std::vector<cv::Mat> network_outputs;process(blob, net, network_outputs);post_process(input_image, output_image, network_outputs);job.output_image->set_value(output_image);print_time(1);}std::this_thread::yield();}
}MainWindow::MainWindow(QWidget *parent): QMainWindow(parent), ui(new Ui::MainWindow)
{ui->setupUi(this);capture = new Capture;infer1 = new Infer1;infer2 = new Infer2;connect(capture, &Capture::stop, this, &MainWindow::clear_image);connect(capture, &Capture::show, this, &MainWindow::receive_image);
}MainWindow::~MainWindow()
{delete ui;
}void MainWindow::receive_image()
{QImage image1 = QImage((const uchar*)result1.data, result1.cols, result1.rows, QImage::Format_RGB888).rgbSwapped();ui->label_1->clear();ui->label_1->setPixmap(QPixmap::fromImage(image1));ui->label_1->show();QImage image2 = QImage((const uchar*)result2.data, result2.cols, result2.rows, QImage::Format_RGB888).rgbSwapped();ui->label_2->clear();ui->label_2->setPixmap(QPixmap::fromImage(image2));ui->label_2->show();
}void MainWindow::clear_image()
{ui->label_1->clear();ui->label_2->clear();capture->quit();infer1->quit();infer2->quit();
}void MainWindow::on_pushButton_open_video_clicked()
{video = QFileDialog::getOpenFileName(this, tr("Open Video"), "", tr("(*.mp4 *.avi *.mkv *mpg *wmv)"));if(video.isEmpty()) return;video_end = false;capture->set_capture(video);infer1->set_model("yolov5n-w640h352.onnx");infer2->set_model("yolov5s-w640h352.onnx");capture->start();infer1->start();infer2->start();
}
相关文章:
yolov5目标检测多线程Qt界面
上一篇文章:yolov5目标检测多线程C部署 V1 基本功能实现 mainwindow.h #pragma once#include <iostream>#include <QMainWindow> #include <QFileDialog> #include <QThread>#include <opencv2/opencv.hpp>#include "yolov5.…...
[ubuntu]创建root权限的用户 该用户登录后自动切换为root用户
一、创建新用户 1、创建新用户 sudo useradd -r -m -s /bin/bash 用户名 # -r:建立系统账号 -m:自动建立用户的登入目录 -s:指定用户登入后所使用的shell2、手动为用户设置密码 passwd 用户名 二、为用户增加root权限 1、添加写权限 ch…...

大连交通大学813软件工程考研习题
1.什么是软件生存周期模型?有哪些主要模型? 生存周期模型:描述软件开发过程中各种活动如何执行的模型。对软件开发提供强有力的支持,为开发过程中的活动提供统一的政策保证,为参与开发的人员提供帮助和指导,是软件生存周期模型…...
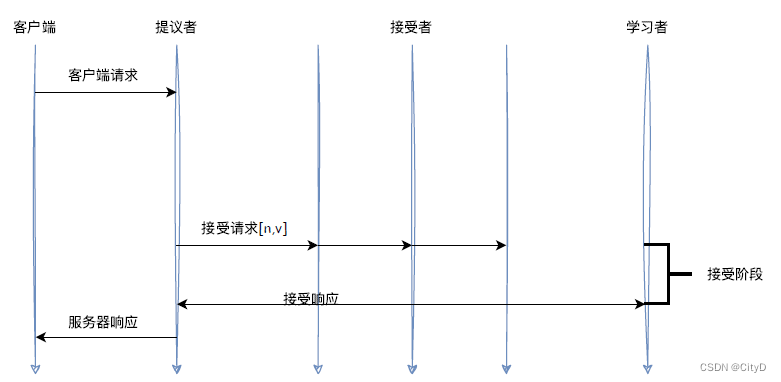
分布式协议与算法——Paxos算法
目录 Paxos算法Basic Paxos算法三种角色如何达成共识(协商过程)小结: Multi-Paxos算法关于 Multi-Paxos 的思考领导者优化Basic PaxosChubby 的 Multi-Paxos 实现小结 参考 Paxos算法 Paxos论文 Paxos Made Simple 、author:Lesli…...

Spring中的Websocket身份验证和授权
目录 一、需要了解的事项二、依赖三、WebSocket 配置3.1 、简单的消息代理3.2 、Spring安全配置 一、需要了解的事项 http和WebSocket的安全链和安全配置是完全独立的。SpringAuthenticationProvider根本不参与 Websocket 身份验证。将要给出的示例中,身份验证不会…...

【果树农药喷洒机器人】Part7:静态PWM变量喷药实验
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...
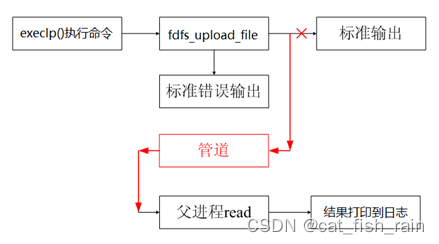
C++ 网络编程项目fastDFS分布是文件系统(一)
目录 1.项目架构图 1. 项目架构图 1.1 一些概念 1.2 项目架构图 2. 分布式文件系统 2.1 传统文件系统 2.2 分布式文件系统 3. FastDFS 3.1 fastDFS介绍 3.2 fastDFS安装 3.3 fastDFS配置文件 3.4 fastDFS的启动 4. fastDFS状态检测 4.1 对file_id的解释 4. 2上传…...

PoseiSwap 开启“Poseidon”池,治理体系或将全面开启
PoseiSwap 曾在前不久分别以 IDO、IEO 的方式推出了 POSE 通证,但 PoseiSwap DEX 中并未向除 Zepoch 节点外的角色开放 POSE 资产的交易。而在前不久,PoseiSwap 推出了全新的“Poseidon”池,该池将向所有用户开放,并允许用户自由的…...

【C/C++】重载运算符特性
重载运算符是 C 中的一个重要特性,它允许程序员自定义类类型的运算符行为。重载运算符的使用场景包括: 使类类型的对象能够像内置类型一样进行运算:例如,可以重载加号运算符,使两个对象相加时能够像两个整数相加一样。…...
HTML+JavaScript构建一个将C/C++定义的ANSI字符串转换为MASM32定义的DWUniCode字符串的工具
公文一键排版系统基本完成,准备继续完善SysInfo,增加用户帐户信息,其中涉及到Win32_Account结构,其C定义如下: [Dynamic, Provider("CIMWin32"), UUID("{8502C4CC-5FBB-11D2-AAC1-006008C78BC7}"…...
24届近3年南京信息工程大学自动化考研院校分析
今天给大家带来的是南京信息工程大学控制考研分析 满满干货~还不快快点赞收藏 一、南京信息工程大学 学校简介 南京信息工程大学位于南京江北新区,是一所以大气科学为特色的全国重点大学,由江苏省人民政府、中华人民共和国教育部、中国气…...

【LeetCode】1572.矩阵对角线元素的和
题目 给你一个正方形矩阵 mat,请你返回矩阵对角线元素的和。 请你返回在矩阵主对角线上的元素和副对角线上且不在主对角线上元素的和。 示例 1: 输入:mat [[1,2,3],[4,5,6],[7,8,9]] 输出:25 解释:对角线的和为&a…...
2023-08-08 Ubuntu 挂载U盘 fdisk -l 、sudo mount /dev/sdb1 /mnt/mydisk
一、基本命令 1、插入U盘,查看U盘是否被系统识别: 打开终端,输入: sudo fdisk -l 查看系统是否识别U盘,如果识别,会显示U盘的相关信息,如果没有识别,则说明系统没有识别U盘。 2…...

make/makefile/cmake/nmake
最近,有没有被make、cmake、makefile... ... 这些东西绕晕了,看看下面的文章,也许就可以理解清楚了。 1. gcc 它是GNU Compiler Collection(就是GNU编译器套件),也可以简单认为是编译器,它可以…...
实用的开源应用全新开源源码Vue3+TS的前后台分离的开发平台源码开源技术社区平台
开源全新开源源码Vue3TS的前后台分离的开发平台源码。创意、新奇、有趣、实用的开源应用、系统、软件、硬件及技术,一个探索、发现、分享、使用与互动交流的开源技术社区平台。致力于打造活力开源社区,共建开源新生态! 功能简介 个人办公&a…...
C++复习笔记——primer第五版
文章目录 一、引用和指针1.引用2.指针2.1利用指针访问对象2.2指针的值或指针所指对象的值的改变 3.赋值和指针4.指向指针的引用 二、String1.初始化String对象的方式2. string对象上的操作3.使用getline读取一整行4.字面值和字符串相加5.使用for循环改变字符串中的字符 三、Vec…...
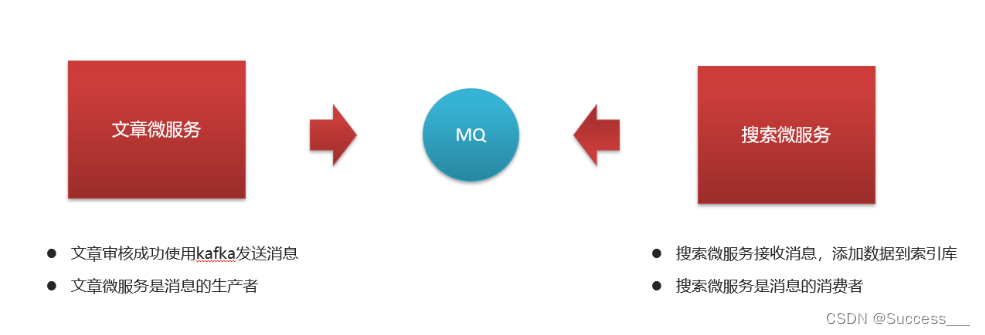
ElasticSearch:项目实战(2)
ElasticSearch: 项目实战 (1) 需求: 新增文章审核通过后同步数据到es索引库 1、文章服务中添加消息发送方法 在service层文章新增成功后,将数据通过kafka消息同步发送到搜索服务 Autowiredprivate KafkaTemplate<String,String> kafkaTemplate;/…...
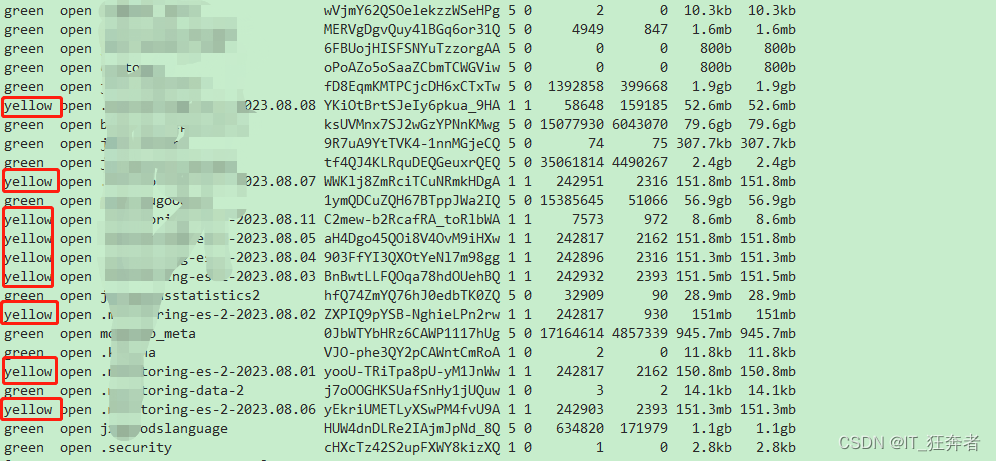
Eleastisearch5.2.2利用镜像迁移构建实例后ES非健康状态
正常迁移完成后启动服务,查看ES非健康状态 此时观察ES集群状态:curl -XGET -u elastic:xxx localhost:9200/_cluster/health?pretty 注意到"active_shards_percent_as_number" : 88.8888 该项的值不产生变化;集群状态"status" : “…...

sealos安装k8s
一、前言 1、我前面文章有写过使用 kubeadm 安装的方式,大家可以去参考 (二)k8s集群安装,有一系列的k8s文章说明 2、安装k8s的方式有很多 kubeadmsealoskubespray等等 3、关于sealos来安装 k8s ,也是非常建议大家去…...

经典贪吃蛇游戏 - 用 C 语言实现控制台版
在本篇博客中,我们将一起来实现经典的贪吃蛇游戏,使用 C 语言编写,并在控制台中运行。这个小游戏会让你回忆起童年的经典游戏体验。我们将从游戏的初始化开始,逐步实现游戏的各个功能,包括蛇的移动、食物的生成、得分的…...

量子互补采样游戏:揭示量子计算优势的新范式
1. 量子互补采样游戏:一场经典与量子的对决量子计算领域最引人入胜的现象之一,就是量子系统能够展现出经典系统无法企及的行为特征。这种"经典性违反"现象在量子信息处理中扮演着关键角色,而互补采样游戏则为我们提供了一个绝佳的研…...

详解两种方法查看SVN的账号和密码
文章目录一. 方法一:软件解析二. 方法二:TortoiseSVN 查看已保存数据进软件公司刚开始做项目之前,可能会需要添加一个SVN地址来download一个项目进行开发。Boss会给你一个账号名密码,你登录就可以进行checkout了。可是,…...

工业机器人装配仿真到现实的挑战与NVIDIA Isaac Lab解决方案
1. 工业机器人装配的仿真到现实挑战在制造业、汽车、航空航天、电子和医疗设备等行业中,多零件装配是一个关键环节。传统自动化装配系统存在明显的局限性——它们通常是为特定任务设计的固定自动化系统,需要大量人工工程来设计和部署,缺乏适应…...

别再为y+发愁了!Fluent新手必看:不同湍流模型的近壁面处理到底怎么选?
Fluent湍流模型近壁面处理实战指南:从理论到一键配置 在计算流体力学(CFD)领域,湍流模拟的准确性很大程度上取决于近壁面处理的正确选择。许多Fluent初学者在面对Standard Wall Functions、Enhanced Wall Treatment、Menter-Lechner等选项时,…...

颠覆传统巡检模式:AI技术如何重塑安全生产新格局
作为"我ai去巡检"小程序的技术研发团队,我们亲眼见证了人工智能如何从实验室概念转变为守护安全生产的核心力量。今天,我们将深入剖析AI技术在安全生产领域的前沿应用,揭秘我们如何攻克技术难题,打造这款重新定义行业标…...

DeepPCB:如何用1500对工业级图像彻底解决PCB缺陷检测难题?
DeepPCB:如何用1500对工业级图像彻底解决PCB缺陷检测难题? 【免费下载链接】DeepPCB A PCB defect dataset. 项目地址: https://gitcode.com/gh_mirrors/de/DeepPCB 还在为PCB缺陷检测项目找不到高质量训练数据而烦恼吗?还在担心你的深…...
的完整修复指南)
Android开发避坑:别再直接用startService了,系统进程调用异常(Calling a method...)的完整修复指南
Android系统进程服务调用异常深度解析与实战修复指南 引言 在Android系统级应用开发过程中,许多开发者都曾遭遇过这样的运行时异常:"Calling a method in the system process without a qualified user"。这个看似简单的错误提示背后ÿ…...

Oumuamua-7b-RP环境部署:conda torch29环境检查+GPU算力适配完整流程
Oumuamua-7b-RP环境部署:conda torch29环境检查GPU算力适配完整流程 1. 项目概述 Oumuamua-7b-RP 是一个基于Mistral-7B架构的日语角色扮演专用大语言模型Web界面,专为沉浸式角色对话体验设计。这个项目为日语角色扮演爱好者提供了一个直观的中文界面&…...
函数深度解析与JSON数据高效抽取)
Hive实战:get_json_object()函数深度解析与JSON数据高效抽取
1. 为什么需要get_json_object()函数 在电商数据分析场景中,用户行为日志通常以JSON格式存储。我遇到过这样一个真实案例:某电商平台每天产生上亿条用户行为日志,每条日志包含用户ID、浏览商品、地理位置等20多个字段。如果直接使用字符串处理…...

局域网介质访问控制方式
介质 传输介质(网线、无线信号)访问控制 多台设备(如电脑、路由等)如何有序地使用同一根线/同一片空间来发数据,避免碰撞和混乱。一下均已电脑作比。一、CSMA/CD(带冲突检测的载波侦听多路访问࿰…...