基于smardaten无代码开发智能巡检系统,让无人机飞得更准
目录
- 引言
- 需求背景
- 搭建思路
- 开发过程
- (1)无人机设备数据接入
- (2)无人机巡检任务管理
- (3)无人机三维防控监视
- (4)运防一体化大屏设计
- (5)异常告警管理
- (6)基础信息维护
- 总结
引言
话说现在无人机可真的太火了。各个行业都在用无人机做一些业务场景的开拓,典型的像农业施肥撒药、区域环境监测、城市应急调度、以及电站设备远程巡检等等。由于可以装载视频监控,可以远程传输视频画面监测设备、环境等现状,小小的无人机解决了很多远程工作和重复性工作, 可谓是帮了人工大忙。
相对的,无人机设备智能化提升,后台的数据监测管理的需求也随之而来。
需求背景
前阵子,一个做能源电站管理的朋友说到,他们也在用无人机做变电站的一些巡检工作,但是因为变电站数量比较多、站点又比较分散,所以想做个运防监测管理平台,这样可以做个集中的管控。
这个场景我还蛮感兴趣的,其实无人机巡检方案主要包括无人机设备、传感器、飞行规划系统、后台数据分析管理等几个部分。
- 首先,需要采集无人机设备和相关传感器设备的基础数据,可以进行远程控制。
- 然后,进行飞行规划,确定无人机的飞行路径,无人机按照规划的路径进行飞行,通过传感器收集这些动态的数据;
- 通用的就是对收集到的数据进行处理和分析,主要还包括对设备、异常情况等数据的分析管理;
- 高级一点的可以通过AI去做视频智能分析识别,比如变电站的一些异常情况,可以自动发现。不过这种大多靠AI算法去建模和算法优化。
朋友说他们的无人机目前都是人员现场操控的,而且通常需要根据电站情况在周边多次循环飞行,很难提前规划好飞行路径。也就是说智能路径规划这些功能不需要。
这么看来,其实需求也没很复杂,基本还是设备数据连接,远程采集传输、数据统计分析、飞行任务管理和巡检管理等。
因为我刚好在研究一些低代码、无代码开发平台,其中smardaten这个平台看起来功能体系是比较全的。之前做过一些单点的试用,刚好借助这次机会来练练手。
当然,中间也找了个他们的产品技术支持,很快就做了个大概。这次整体系统环境改为深色系。
限于一些实际设备和环境的允许,部分功能做的比较简单,且看看效果如何。
搭建思路
快速连接无人机和电厂设备后,预先在远程终端设定巡检任务规划、航行时间等,在系统上就可以查看巡检路线、巡检视频回放,无需现场操作即可知悉电站设备与环境状态,并完成数据自动上传及分析应用等能力。
这个系统的整体配置过程大体上包括6个阶段:
1、连接无人机以及一些管控设备
2、巡检任务和过程一些数据管理
3、运防一体化数据大屏
4、日常巡检的告警管理
5、无人机防控的多维度监视
6、基础信息维护
开发过程
(1)无人机设备数据接入
需要连接的设备包括:无人机、控制器、机巢等设备。

通过平台IoT协议,对所有设备通过协议接口配置,对数据处理和采集数据存储按需求进行配置。支持添加、设置和参数管理,站端ID、反无设备的连接与信息管理。
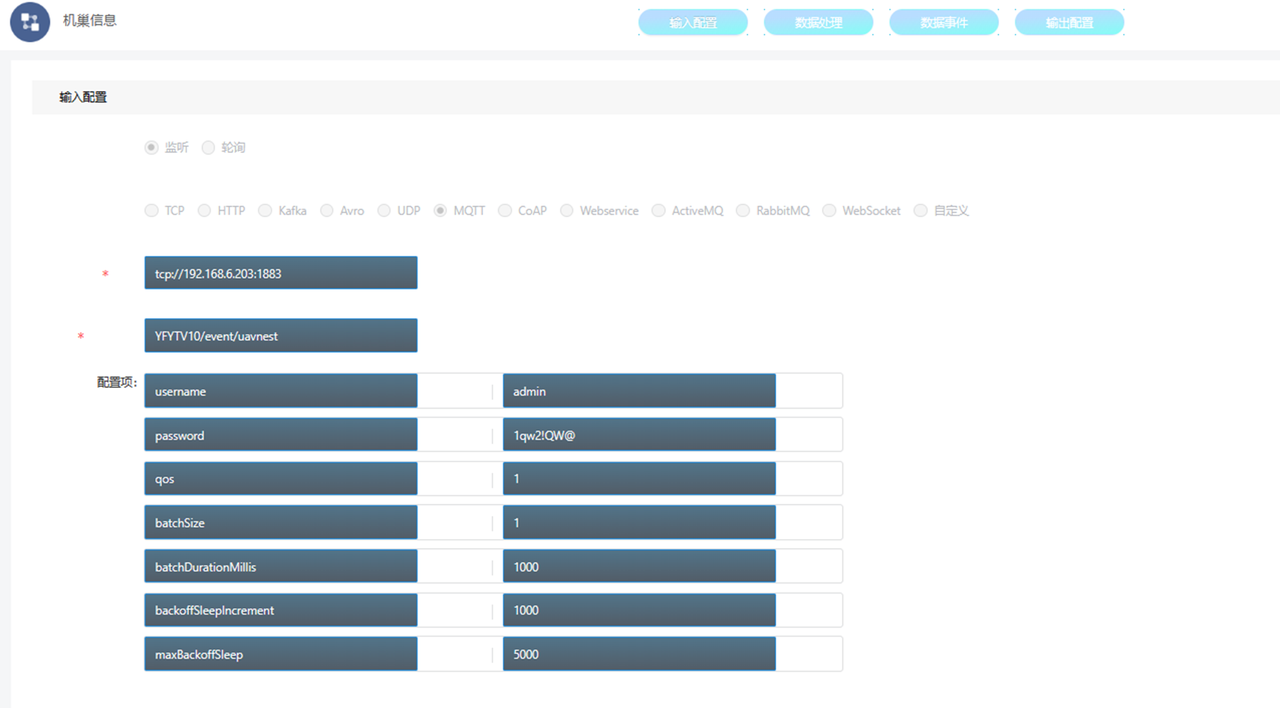
对采集的数据可以按照字段进行详细的配置字段类型和获取方式。
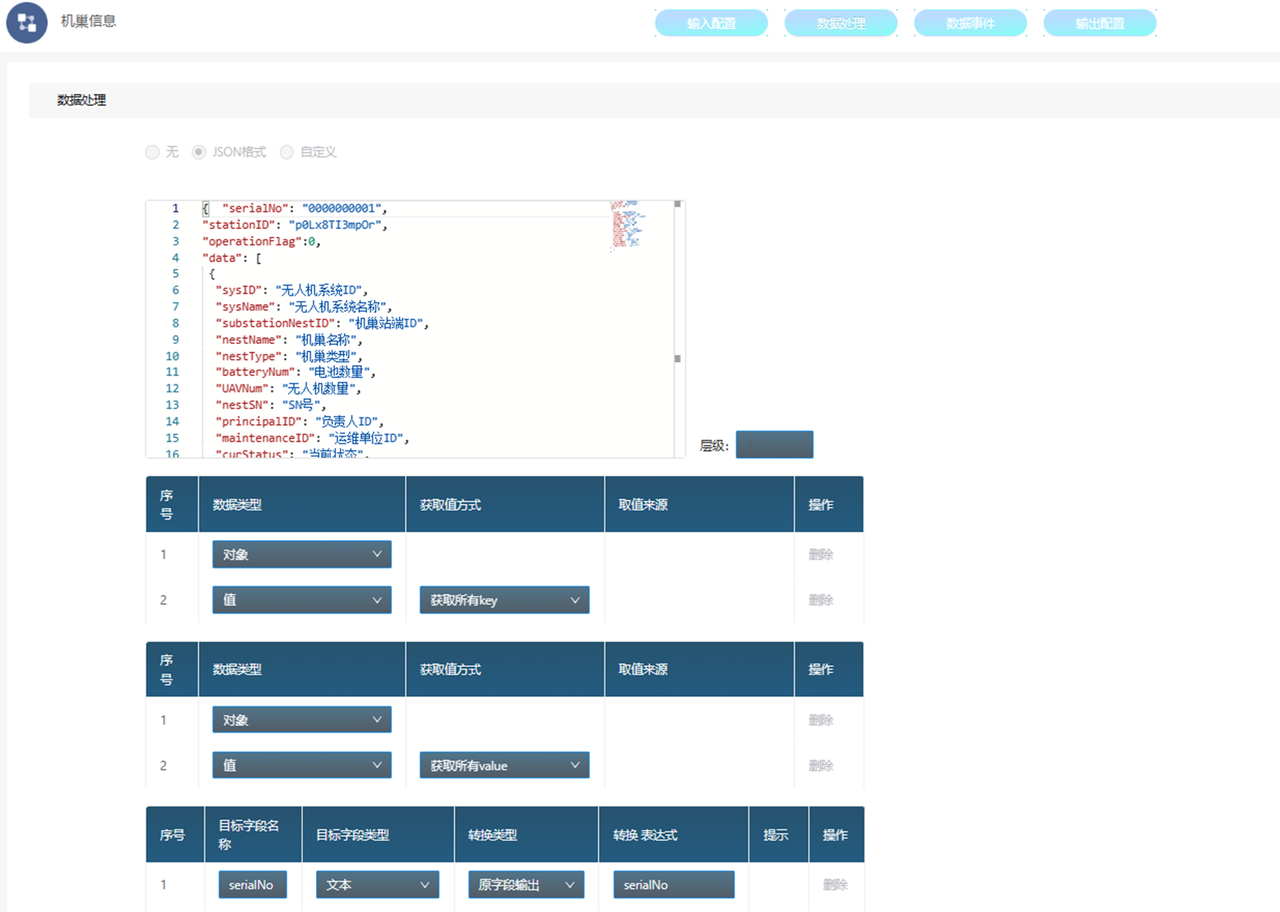
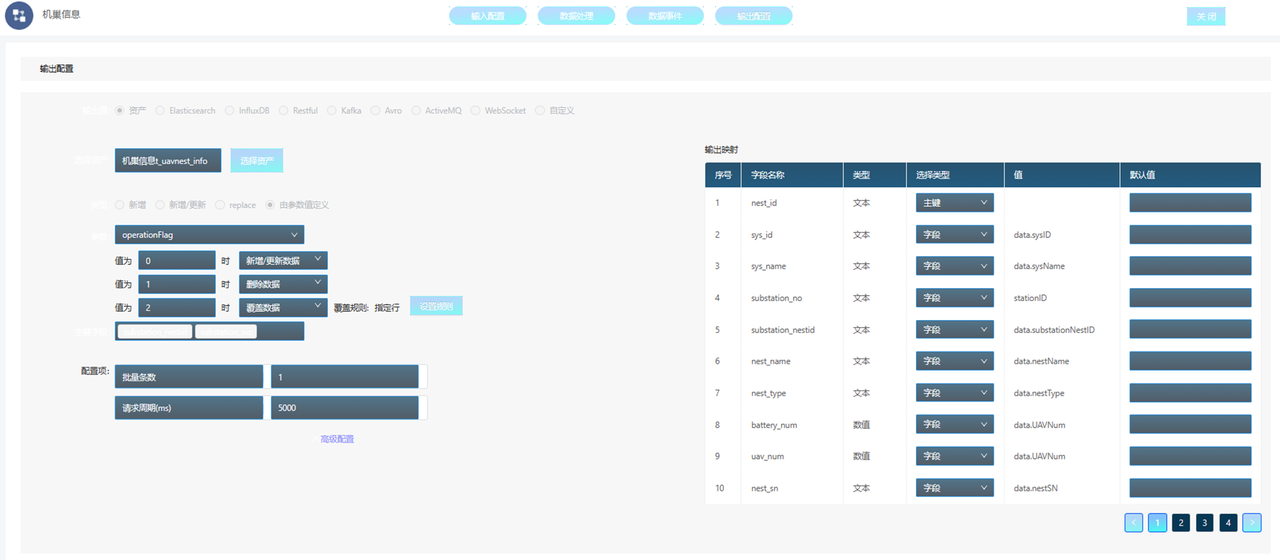
配置数据输出的路径地址,这里可以设定数据规则取值,比如超过规则的数值可以删掉,可以设置请求周期等。
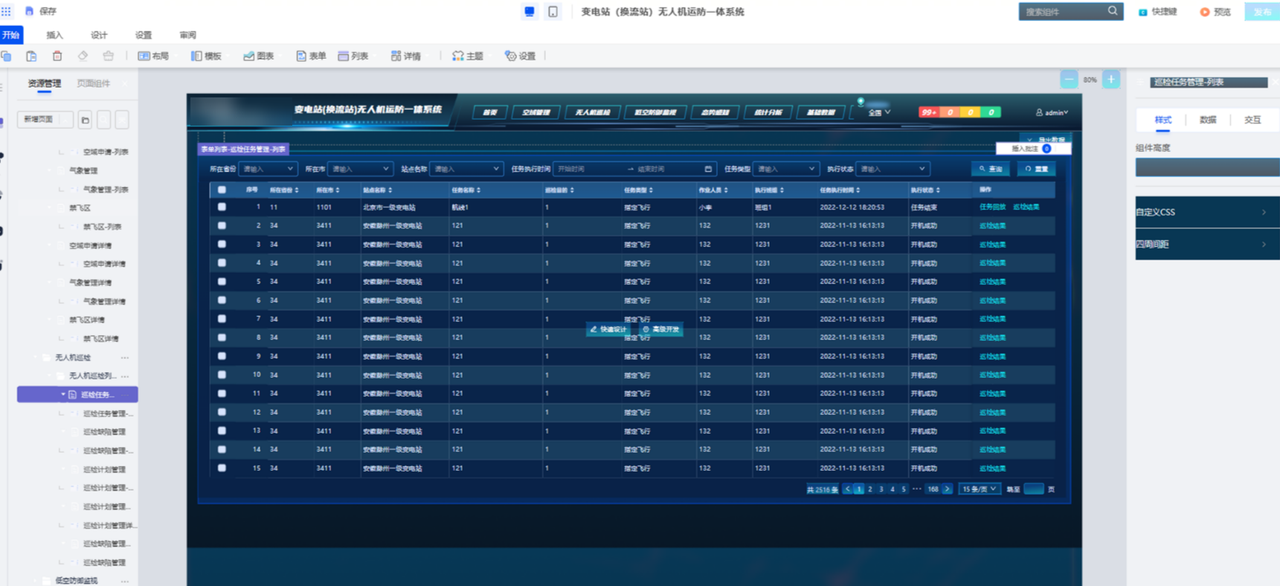
(2)无人机巡检任务管理
对利用无人机飞行巡检的情况进行维护管理,管理人员可添加巡检计划,比如巡检站点名称、任务名称、任务类型、作业人员、飞行时间等。飞机并进行实景模拟飞行,可查看防御地图,提高巡检管理效率。
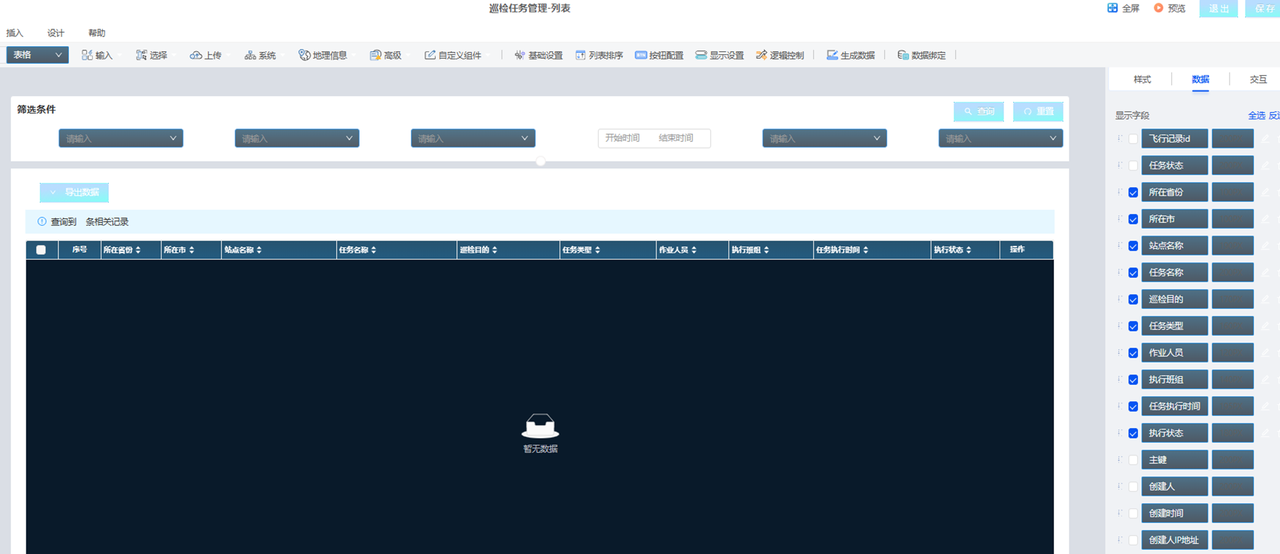
对当前巡检任务数据配置变量,这样相当于可以和其他模块数据做动态关联和匹配。
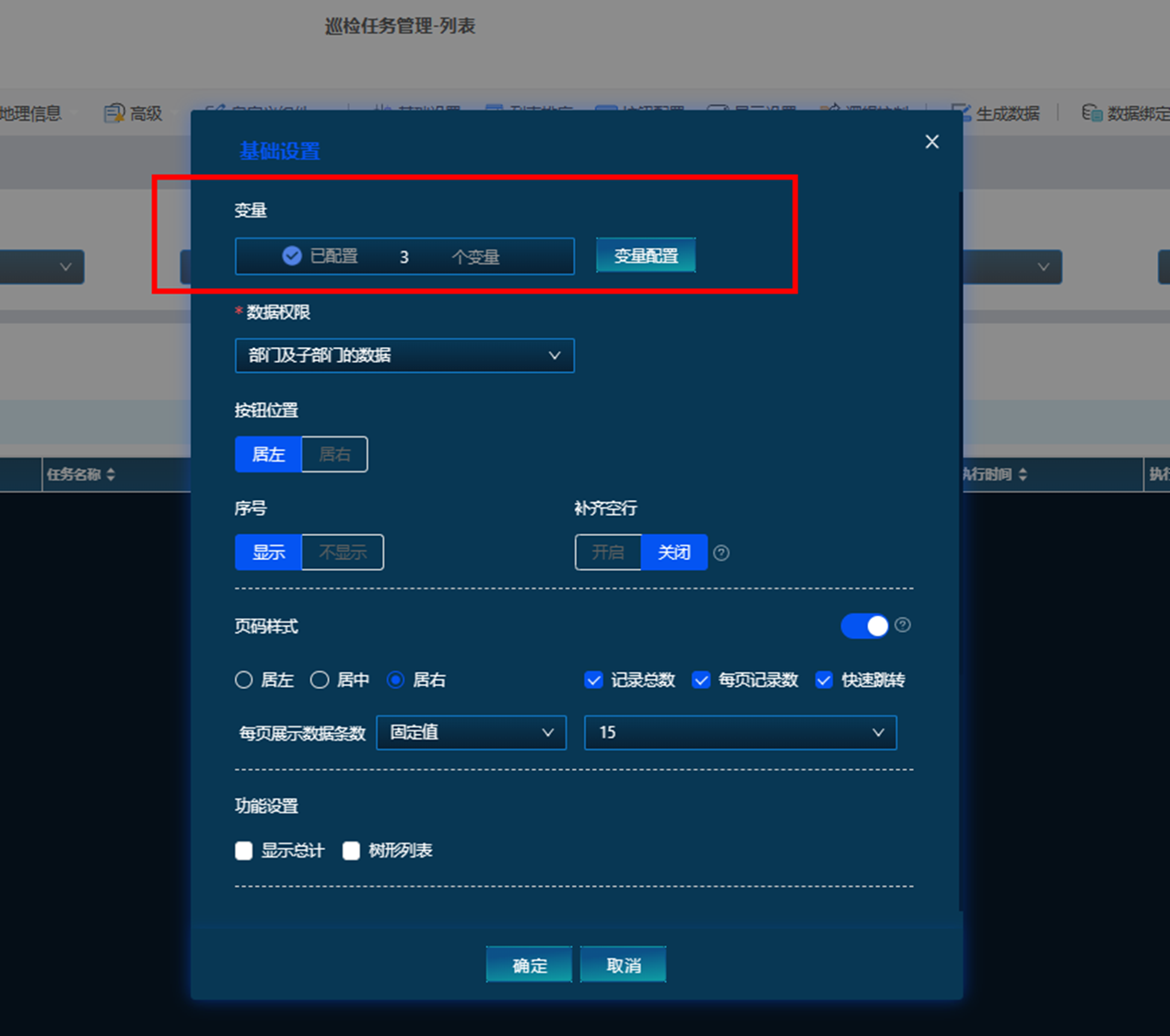
变量可以添加多个,包含省份、城市、站点名称。

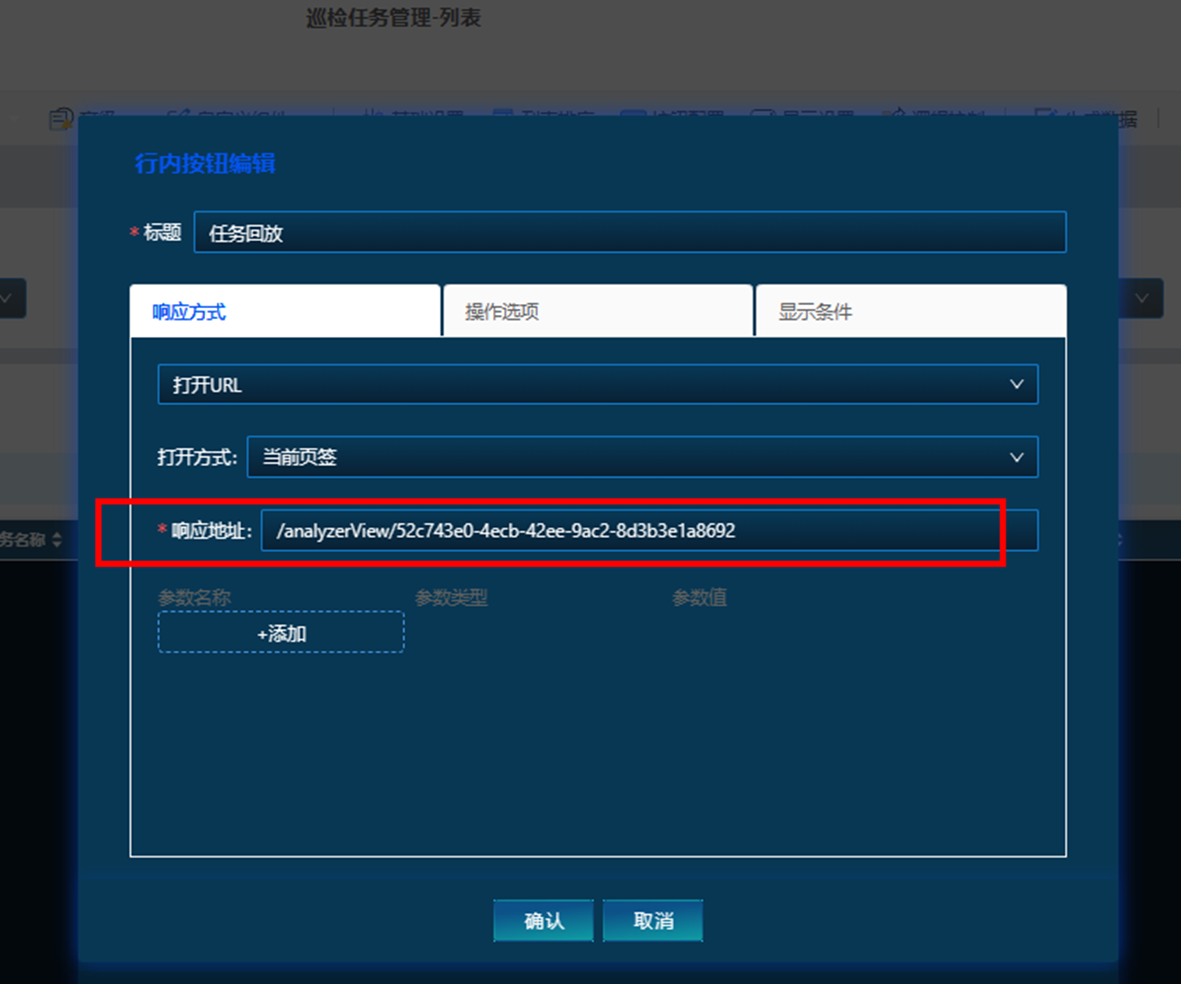
列表页添加行内按钮,以任务回放为例,跳转到无人机巡检录制视频。
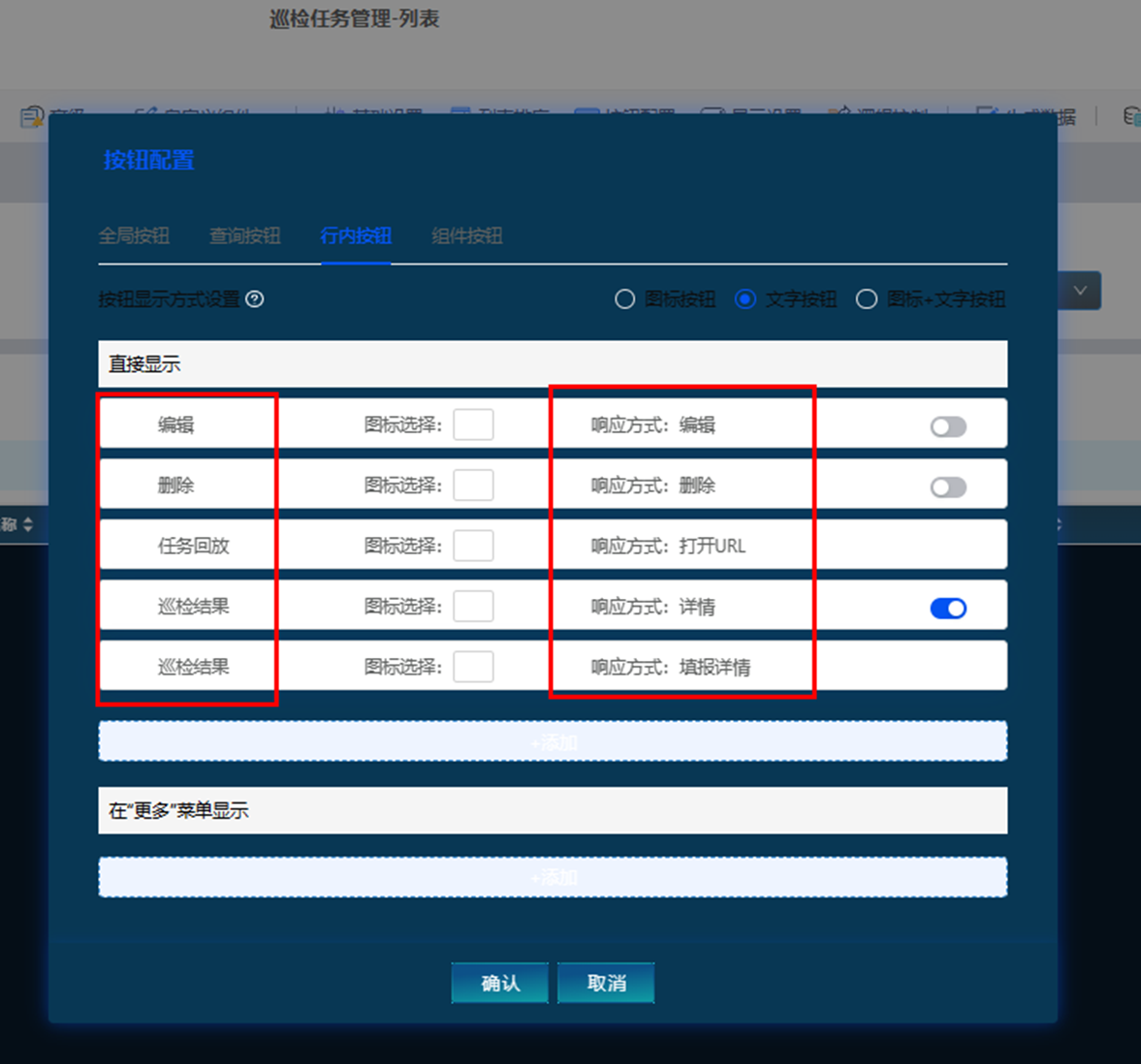
响应地址是提前连接好无人机设备及其对应的视频地址。
巡检任务填报完成后页面的样式。有些表单的填报动作是在移动端进行,PC端用于查看和管理。
(3)无人机三维防控监视
三维实时飞行监控的要求比较高,这对模型质量、数据传输要求都比较高。三维场景下,可以对目标区域的无人机系统进行飞行监控,对飞行记录进行回放、路线查看、视频调取,以及对入侵的无人机进行监视管理。
平台本身三维模型开发不支持,如果有模型可以直接导入,做联动交互。这里暂时引用普通的三维模型,做一个简单的交互场景。可以查看无人机飞行记录,包含经纬度、海拔高度、飞行时间等。

但飞行动作、加速减速、 飞机记录视频等一些个性化交互动作,需要在smardaten数字孪生高级平台进行配置开发,大多交互场景不需要代码。这里我暂且用一些代码二次开发简单尝试了一下。
(4)运防一体化大屏设计
对管辖范围内各站点区域运防态势进行可视化分析展示,实时监测关键数据,对预警信息进行定位和详细数据查看。选择了常见的大屏布局,中间以地图为主,配合关键监测数据进行联动分析展示。

导入目标数据图表类型,如常用的指标卡、曲线图、列表ye可以,匹配目标业务数据即可以展示。复杂的数据图表也可以通过数据分析仪完成,配置好样式、变量,然后统一导入大屏。

(5)异常告警管理
告警管理在很多场景都是相对通用的。对飞行巡检的异常情况进行告警,并在空间地图进行定位,展示告警站点、告警事项、人员信息等。
告警信息以设备自动采集获取到的异常数据展示为主,因此只需要配置所需查看的告警相关字段,以及对应的详情页面。
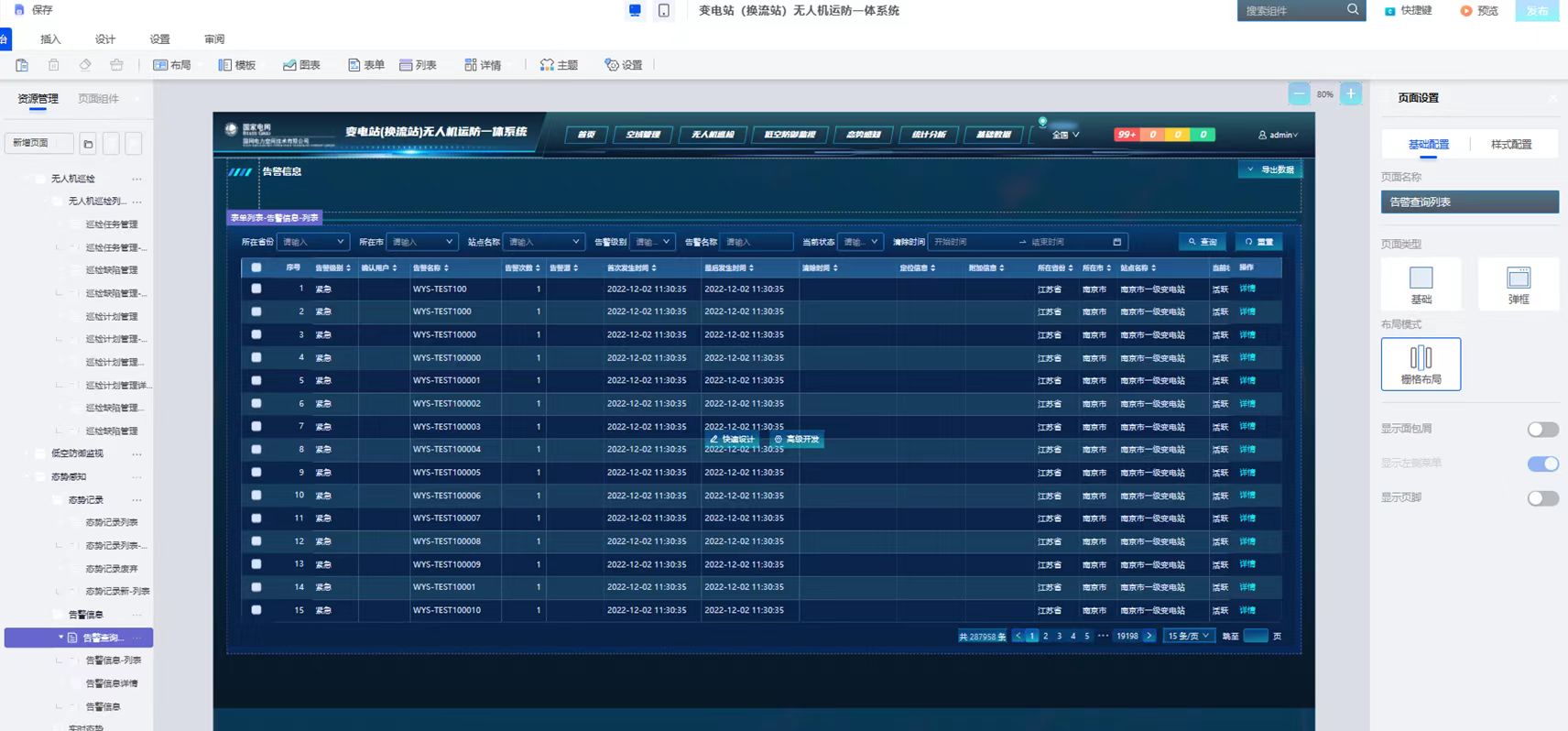
已经配置过告警信息列表的所有字段已经在左侧,可直接拖拽至画布进行布局,无需再次选择组件、也不用再重新绑定数据资产。

(6)基础信息维护
统一对变电站站点、反无设备、无人机控制器、空域申请、禁飞区管理、巡检人员等基础信息进行维护管理。主要是表单、列表和详情的配置,过程方式基本一致。
下面以无人机控制器表单和详情配置为例。
①对所有需要填报的字段并排2列布局,其中运维单位、负责人、是否反无等信息可通过下拉框组件进行快速选择。

②控制器设备填报完成后需要做审核提交,添加自定义按钮,并配置按钮动作。
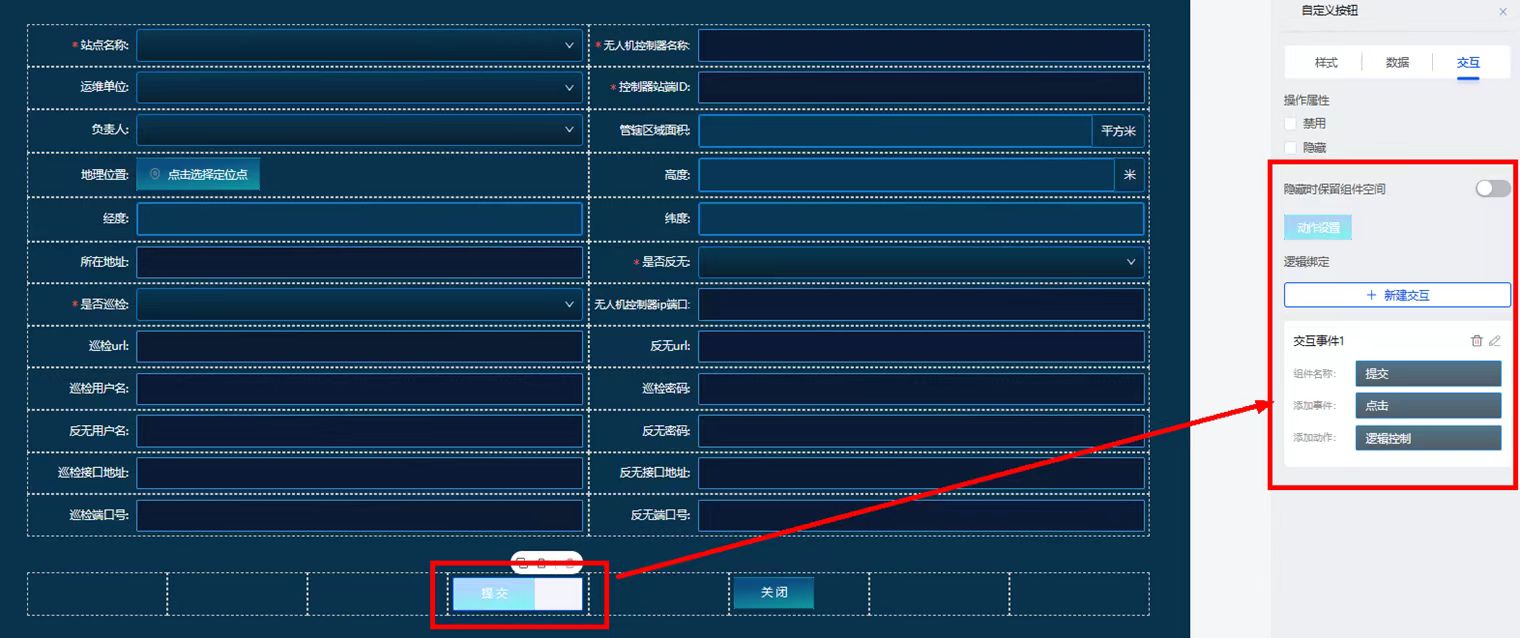
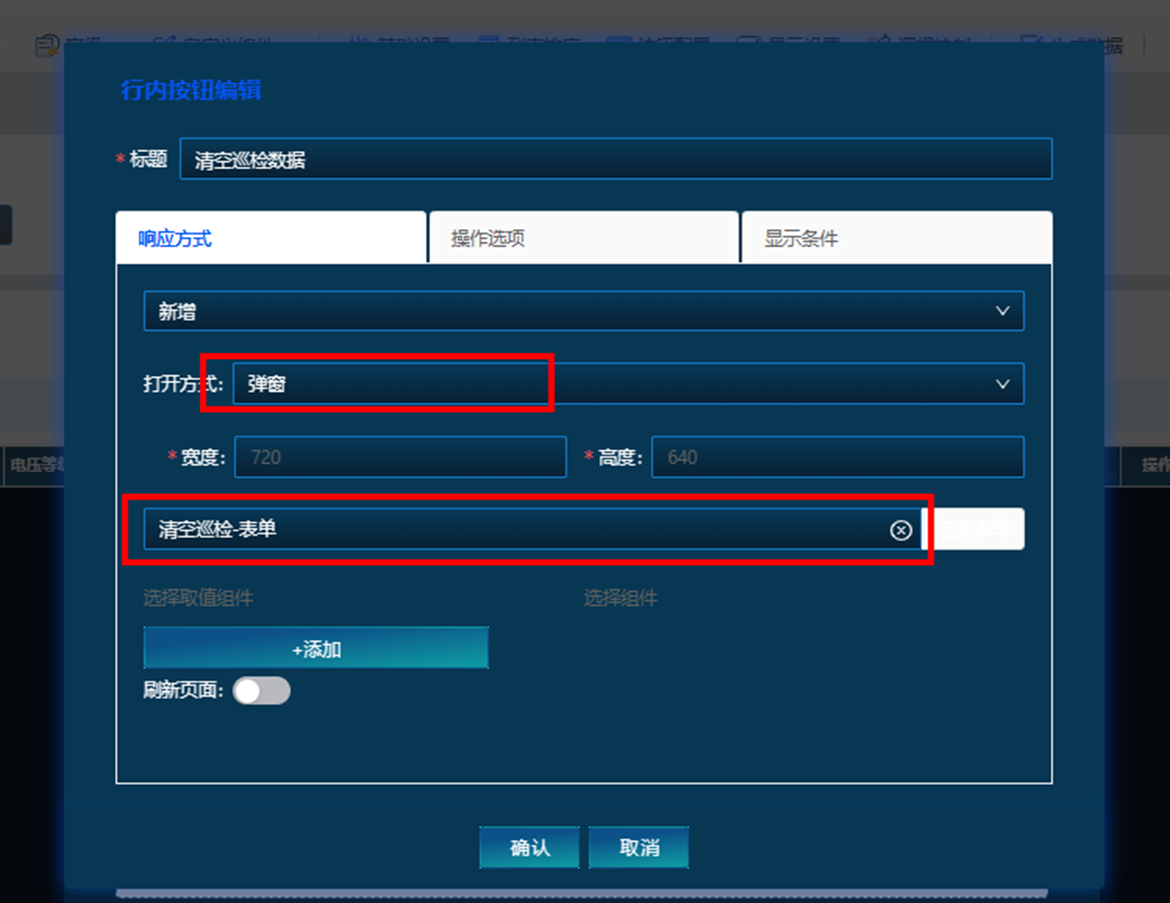
同时在列表页添加几个行内按钮,按钮可以是编辑、删除、弹窗、链接跳转、新增数据等,也可以添加相应的图标。
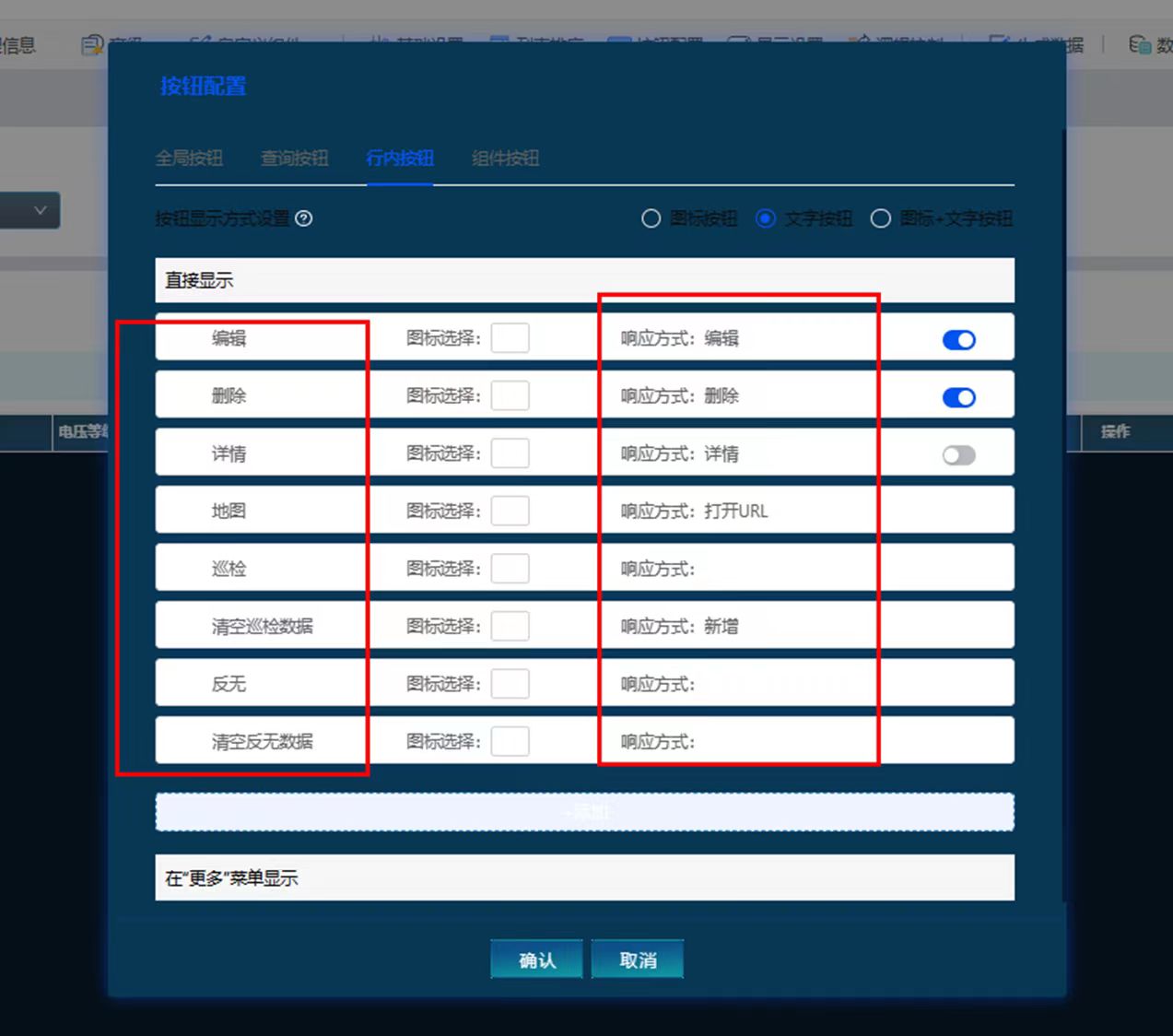
按钮可以选择不同的响应方式,包括编辑、弹窗、打开URL链接、打开新表单等,也可以通过逻辑控制配置更复杂的交互逻辑。
同样的方式,配置无人机设备管理页面,包含对应的站点名称、对应的控制器设备名称、控制器端ID等信息。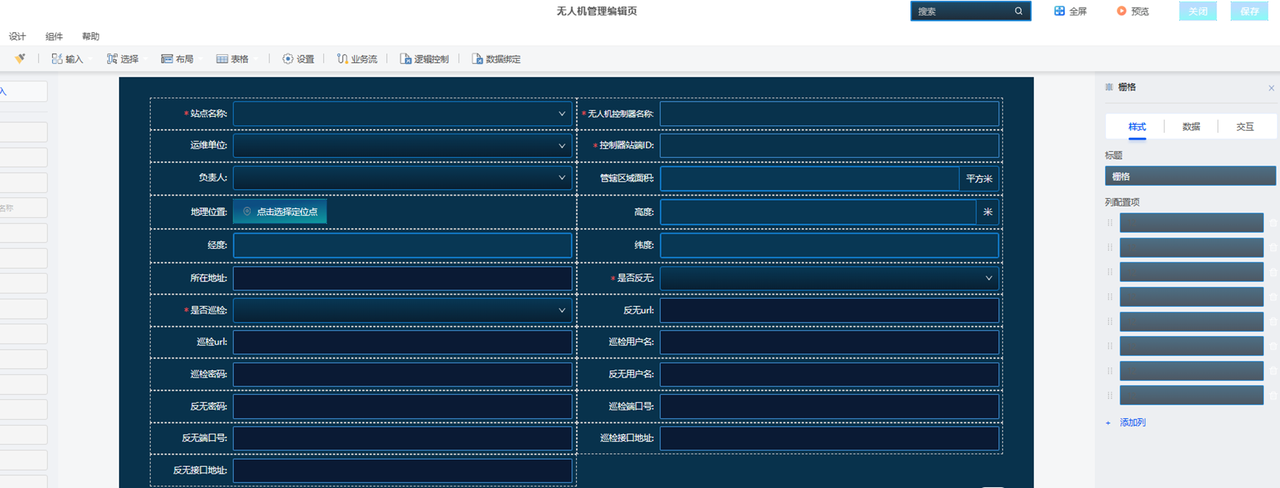
总结
这次做的无人机运防管理平台,虽说还比较糙,但毕竟没有花费太多精力。如果多找几个人专门去做开发配置,应该能做的还不错,还可以细化一些样式。但一顿操作下来, 可以看出无代码开发平台现在已经不是最初理解的那个简单拖拖拽拽构建表单、流程和简单图表。
就比如smardaten作为企业级无代码平台,已经往数据底层集成、数据管理、高级的数据分析展示延伸,而且在看似普通的表单、页面布局上,提供了很多复杂的组件,可以实现比较复杂的交互动作编排。可能不同的低代码、无代码侧重点不同,但确实已经在往行业场景不断下沉、适用性更强。大家可以去smardaten官网试试线上版本。
不过功能的复杂,相应的就有一定的学习难度,还是需要有一定的代码基础和认知。随着无代码开发的实践越来越多,也许再过不久,那些复杂的配置过程还能再进一步简化。甚至还可以借助AIGC技术通过算法模型,实现简单的页面生成或开发动作指引,那开发交互的体验就更棒了。
相关文章:
基于smardaten无代码开发智能巡检系统,让无人机飞得更准
目录 引言需求背景搭建思路开发过程(1)无人机设备数据接入(2)无人机巡检任务管理(3)无人机三维防控监视(4)运防一体化大屏设计(5)异常告警管理(6&…...

51项目——智能垃圾桶
51项目——智能垃圾桶 文章目录 51项目——智能垃圾桶项目需求项目材料(实物图可以百度看一看)接线实战编写部分代码(需要打包好的代码可以私我)效果视频结束项目需求 人靠近,垃圾桶开盖,投放垃圾,人离开,垃圾桶自动关盖。 并屏幕显示距离,和垃圾桶开关的状态。 项目材…...
HCIP——堆叠技术
堆叠 一、简介二、堆叠的优势1、提高可靠性2、简化组网3、简化管理4、强大的网络拓展能力 三、堆叠的方式1、堆叠卡堆叠2、业务口堆叠 四、堆叠的原理1、角色2、单机堆叠3、堆叠ID4、堆叠的优先级5、堆叠的建立过程 五、堆叠的配置 一、简介 堆叠技术 — 可以将多台真是得物理…...
芯片工程师求职题目之CPU篇(3)
1. 什么是cache(缓存)?它的工作原理是什么? Cache是少量的快速内存。它位于主存储器和中央处理器之间。每当CPU请求memory位置的内容时,首先检查cache中是否有此数据。如果数据存在于cache中,CPU直接从cache中获得数据。这是更快…...

Grounding dino + segment anything + stable diffusion 实现图片编辑
目录 总体介绍总体流程 模块介绍目标检测: grounding dino目标分割:Segment Anything Model (SAM)整体思路模型结构:数据引擎 图片绘制 集成样例 其他问题附录 总体介绍 总体流程 本方案用到了三个步骤,按顺序依次为:…...

如何选择更快更稳定的存储服务器
选择更快、更稳定的存储服务器需要考虑以下几个方面: 存储介质:存储服务器的主要存储介质包括固态硬盘(SSD)和机械硬盘(HDD)。相比于机械硬盘,固态硬盘具有更高的读写速度和更低的延迟…...

此芯科技加入 openKylin 开源社区
导读近日消息,据此芯科技官方公众号表示,此芯科技目前已经签署 openKylin 社区 CLA(Contributor License Agreement 贡献者许可协议),正式加入 openKylin 开源社区。 此芯科技成立于 2021 年,是一家专注于设…...
开发一个RISC-V上的操作系统(七)—— 硬件定时器(Hardware Timer)
目录 往期文章传送门 一、硬件定时器 硬件实现 软件实现 二、上板测试 往期文章传送门 开发一个RISC-V上的操作系统(一)—— 环境搭建_riscv开发环境_Patarw_Li的博客-CSDN博客 开发一个RISC-V上的操作系统(二)—— 系统引导…...
电池的正极是带正电?
首先说明结论:电池正极带正电,负极带负电。 一个错误的实例: 如果说电流是从电池正极流动到电池负极,那么电子就是从负极流动到正极,那么正极就是带负电。----这个说法是错误的。这是因为,根据那么很出名…...

Go 协程为什么比进程和线程占用的系统资源低?
1 介绍 进程是一个程序在执行时所占据的独立虚拟内存空间,Linux为每个进程分配一个虚拟内存空间,包括栈、未使用的内存、堆、BSS、DATA和TEXT等。 线程可以看作是轻量级的进程,多个线程在一个进程中“共生”,每个线程拥有独立的…...

性能测试—Jmeter工具
文章目录 性能测试1. 术语介绍2. 方法3. 应用场景4. 工具(Jmeter)4.1 介绍4.2 元件和组件4.2.2 元件4.2.1 组件 4.3 作用域4.4 参数化4.5 执行脚本 性能测试 1. 术语介绍 响应时间(Response time):对请求作出响应所需要的时间。 在互联网上对…...

【分布式系统】聊聊高性能设计
每个程序员都应该知道的数字 高性能 对于以上的数字,其实每个程序员都应该了解,因为只有了解这些基本的数字,才能知道对于CPU、内存、磁盘、网络之间数据读写的时间。1000ms 1S。毫秒->微秒->纳秒-秒->分钟 为什么高性能如此重要的…...
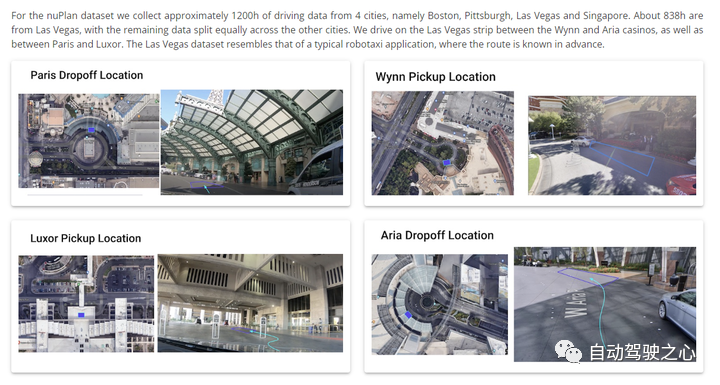
自动驾驶数据集汇总
1.Nuscenes 数据集链接:nuScenes nuscenes数据集下有多个任务,涉及Detection(2D/3D)、Tracking、prediction、激光雷达分割、全景任务、规划控制等多个任务; nuScenes数据集是一个具有三维目标注释的大型自动驾驶数…...

面向对象的基本原则
背景 面向对象是抽象技术的一种实现,将对象作为真实世界中实体的抽象,代表了特定的一块密集而内聚的信息。在面向对象设计及实现中,重点考虑的就是如何做到关注点分离。因为对象内的联系通常比对象间的联系更强。关注点分离就是将对象中高频…...
)
C语言开发基础知识(一)
文章目录 数据类型宏变量函数inline 内联函数static 关键字的作用const 关键字的作用extern 关键字的作用volatile 关键字的作用include 关键字的作用数组、字符串指针堆内存管理结构体文件操作数据类型 C语言中数据类型分有符号和无符号,默认是有符号的。 有符号类型: 数据…...

API网关类型与区别
什么是API网关? 在现代软件架构中,API(应用程序编程接口)网关起着重要的作用。它是一个中间层,用于管理和控制应用程序之间的通信。API网关可以提供一些关键功能,如流量控制,安全认证ÿ…...

linux:nginx网站升级至http2
参考: 怎样把网站升级到http/2 - 知乎 HTTP/2 与 HTTP/1.1:它们如何影响 Web 性能? | Cloudflare 总结: nginx.conf修改 http2需要ssl支持 listen 443 ssl http2;...
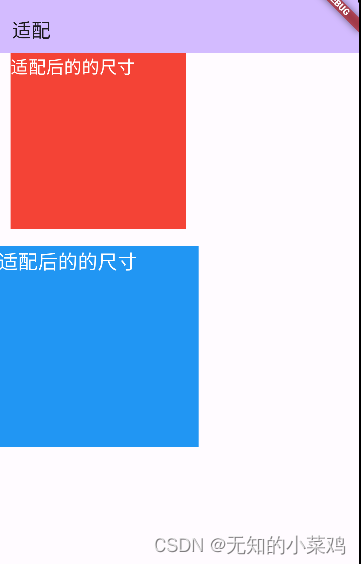
Flutter:屏幕适配
flutter_screenutil flutter_screenutil是一个用于在Flutter应用程序中进行屏幕适配的工具包。它旨在帮助开发者在不同屏幕尺寸和密度的设备上创建响应式的UI布局。 flutter_screenutil提供了一些用于处理尺寸和间距的方法,使得开发者可以根据设备的屏幕尺寸和密度…...

中科亿海微ROM使用
标题 ROM(Read-Only Memory,只读存储器)是一种在FPGA(Field-Programmable Gate Array,现场可编程门阵列)中常用的存储器类型。与RAM(Random Access Memory,机存取存储器)…...
Python接口自动化测试之UnitTest详解
基本概念 UnitTest单元测试框架是受到JUnit的启发,与其他语言中的主流单元测试框架有着相似的风格。其支持测试自动化,配置共享和关机代码测试。支持将测试样例聚合到测试集中,并将测试与报告框架独立。 它分为四个部分test fixture、TestC…...

从谷歌论文到手机相册:深度拆解HDR+爆照技术如何拯救你的夜景照片
从谷歌论文到手机相册:深度拆解HDR爆照技术如何拯救你的夜景照片 当你在昏暗的餐厅里试图拍下美食,或是面对城市夜景举起手机时,是否总被模糊、噪点和高光溢出的照片所困扰?这正是HDR技术要解决的痛点。不同于传统HDR通过曝光 bra…...

深入解析Buildroot:从零构建定制化Linux根文件系统
1. Buildroot入门:嵌入式开发的瑞士军刀 第一次接触Buildroot是在2015年开发智能家居网关时,当时我们需要一个仅占用8MB存储空间的轻量级Linux系统。传统发行版动辄几百MB的体积完全不适合资源受限的嵌入式设备,而手动构建根文件系统又像在走…...
)
银河麒麟V10 SP1上编译Qt5.15.10,我踩过的那些依赖包的坑(保姆级避坑指南)
银河麒麟V10 SP1编译Qt5.15.10:深度解析依赖包陷阱与实战排错指南 当你在银河麒麟V10 SP1系统上尝试编译Qt5.15.10时,是否经历过这样的场景:满怀信心地执行./configure命令,却在几分钟后看到满屏红色错误提示?作为一款…...

C语言属于什么软件
c语言不属于任何软件! C语言是一门通用计算机编程语言,应用广泛。C语言的设计目标是提供一种能以简易的方式编译、处理低级存储器、产生少量的机器码以及不需要任何运行环境支持便能运行的编程语言。 特有特点 C语言是一个有结构化程序设计、具有变量作用…...

CTF全解析:五大核心模块+零基础学习+参赛指南
CTF全解析:五大核心模块零基础学习参赛指南 摘要:CTF(Capture The Flag,夺旗赛)作为网络安全领域最具实战性的竞赛形式,是零基础入门网络安全、锤炼技术、积累求职竞争力的最佳路径。但很多新手刚接触时&a…...

MLX‑VLM :Mac本地跑通多模态大模型的开源项目!让图片、音频、视频理解一键上手
目录 一、MLX‑VLM到底是什么? 二、核心亮点:Mac本地多模态自由 1. 全模态支持:看、听、读全都行 2. 性能拉满:苹果芯片深度优化 1) Qwen3.5‑4B‑4bit(128k 上下文) 2) gemma‑4‑31b‑it࿰…...

高性能计算中的Apptainer_Singularity容器技术解析
1. 高性能计算为什么需要专属容器技术 第一次接触高性能计算集群时,我被复杂的软件依赖搞到崩溃。生物信息学的同事需要运行一个基因测序工具,但系统缺少某个特定版本的库文件;隔壁物理系的同学编译流体仿真程序时,又和现有环境冲…...

2026 AI Agent趋势:大模型驱动下的智能体技术演进路线
2026 AI Agent趋势:大模型驱动下的智能体技术演进路线 引言:从工具到伙伴——AI Agent的范式转变 在技术发展的长河中,我们见证了从单机计算到互联网,从移动应用到云原生的一次次范式转变。而今,我们正站在另一个重要的转折点:AI Agent(智能体)时代的到来。 2023年被…...

AI Agent vs Web3:哪个赛道更有钱景
如果实在没啥项目经验,可以看看知乎知学堂的AILLM开发课,最为讲的就是ai agent的应用开发,除了模型调用、对接、搭建外,还有很多「实战项目」拆解,自己做完可以写到简历里,求职面试的时候也不虚。 现在很多…...
:逆熵跃迁动力学——生于忧患的数学化模型)
贾子成功定理(高阶完整版):逆熵跃迁动力学——生于忧患的数学化模型
贾子成功定理(高阶完整版):逆熵跃迁动力学——生于忧患的数学化模型摘要: 贾子成功定理高阶完整版将“生于忧患”转化为量化动力学模型,核心公式SkT/I,微分方程dS/dt kT - IS,稳态解S*kT/I。跃…...