华测导航GPCHC协议ROS驱动包,CGI610、410接收机,NavSatStatus、GPSFix和普通格式
目录
- 一、消息类型
- 1.1 sensor_msgs/NavSatFix
- 1.2 sensor_msgs/NavSatStatus
- 1.3 gps_common::GPSFix
- 1.4 sensor_msgs::Imu
- 二、部分源码
- 2.1 相关的依赖和库
- 2.2 文件结构
- 2.3 字段分割函数
- 2.4 定义消息话题
Ubuntu 20.04 + noetic
华测CGI 610——RS232-C——GPCHC
一、消息类型
1.1 sensor_msgs/NavSatFix
官方介绍:sensor_msgs/NavSatFix Message
# Navigation Satellite fix for any Global Navigation Satellite System
#
# Specified using the WGS 84 reference ellipsoid
# 用于WGS84椭球坐标系# header.stamp specifies the ROS time for this measurement (the
# corresponding satellite time may be reported using the
# sensor_msgs/TimeReference message).
# header.stamp 使用ROS时间,卫星时间用sensor_msgs/TimeReference# header.frame_id is the frame of reference reported by the satellite
# receiver, usually the location of the antenna. This is a
# Euclidean frame relative to the vehicle, not a reference
# ellipsoid.
# header.frame_id 是卫星接收器报告的坐标系,通常是GPS天线的位置。
# 这是相对于车辆(中心)的欧几里得坐标变换,而不是参考椭球坐标系。
Header header# satellite fix status information
# 卫星定位状态信息
NavSatStatus status# Latitude [degrees]. Positive is north of equator; negative is south.
# 纬度,单位是 度
float64 latitude# Longitude [degrees]. Positive is east of prime meridian; negative is west.
# 经度,单位是 度
float64 longitude# Altitude [m]. Positive is above the WGS 84 ellipsoid
# WSG 84椭球体下的高度,单位m
# (quiet NaN if no altitude is available).
float64 altitude# Position covariance [m^2] defined relative to a tangential plane
# through the reported position. The components are East, North, and
# Up (ENU), in row-major order.
#位置协方差[m ^ 2]: 相对于切线平面的位置协方差。 组件是East,North和Up(ENU),按行优先顺序排列。
# Beware: this coordinate system exhibits singularities at the poles.
#注意:此坐标系在极点处表现出奇异性。float64[9] position_covariance# If the covariance of the fix is known, fill it in completely. If the
# GPS receiver provides the variance of each measurement, put them
# along the diagonal. If only Dilution of Precision is available,
# estimate an approximate covariance from that.
# 3 - 如果已知修正的协方差,请完全填写。
# 2 - 如果GPS接收器提供了每次测量的方差,请将其沿对角线放置。
# 1 - 如果只有DOP精度衰减因子可用,请据此估计近似协方差。
# 0 - 协方差未知uint8 COVARIANCE_TYPE_UNKNOWN = 0
uint8 COVARIANCE_TYPE_APPROXIMATED = 1
uint8 COVARIANCE_TYPE_DIAGONAL_KNOWN = 2
uint8 COVARIANCE_TYPE_KNOWN = 3uint8 position_covariance_type
1.2 sensor_msgs/NavSatStatus
是sensor_msgs/NavSatFix的子信息。
官方介绍:sensor_msgs/NavSatStatus Message
星基增强和地基增强的介绍: link
# Navigation Satellite fix status for any Global Navigation Satellite System
# 任何GNSS的导航卫星求解固定状态# Whether to output an augmented fix is determined by both the fix
# type and the last time differential corrections were received. A
# fix is valid when status >= STATUS_FIX.
#是否输出增强解取决于求解固定状态和上一次收到差分校正的时间int8 STATUS_NO_FIX = -1 # unable to fix position 不固定
int8 STATUS_FIX = 0 # unaugmented fix 未增强
int8 STATUS_SBAS_FIX = 1 # with satellite-based augmentation 星基增强
int8 STATUS_GBAS_FIX = 2 # with ground-based augmentation 地基增强int8 status# Bits defining which Global Navigation Satellite System signals were
# used by the receiver.
# 定义接收机使用的GNSS卫星信号uint16 SERVICE_GPS = 1
uint16 SERVICE_GLONASS = 2
uint16 SERVICE_COMPASS = 4 # includes BeiDou.
uint16 SERVICE_GALILEO = 8uint16 service1.3 gps_common::GPSFix
官方介绍: gps_common::GPSFix
# A more complete GPS fix to supplement sensor_msgs/NavSatFix.
# 更加完整的GPS状态,以补充 sensor_msgs/NavSatFix.
Header headerGPSStatus status# Latitude (degrees). Positive is north of equator; negative is south.
float64 latitude# Longitude (degrees). Positive is east of prime meridian, negative west.
float64 longitude# Altitude (meters). Positive is above reference (e.g., sea level).
float64 altitude# Direction (degrees from north)
# 单位是 度,从北旋转的方向
float64 track# Ground speed (meters/second)
# 地面速度 m/s
float64 speed# Vertical speed (meters/second)
# 垂直速度 m/s
float64 climb# Device orientation (units in degrees)
float64 pitch
float64 roll
float64 dip# GPS time
float64 time## Dilution of precision; Xdop<=0 means the value is unknown# Total (positional-temporal) dilution of precision
float64 gdop# Positional (3D) dilution of precision
float64 pdop# Horizontal dilution of precision
float64 hdop# Vertical dilution of precision
float64 vdop# Temporal dilution of precision
float64 tdop## Uncertainty of measurement, 95% confidence# Spherical position uncertainty (meters) [epe]
float64 err# Horizontal position uncertainty (meters) [eph]
float64 err_horz# Vertical position uncertainty (meters) [epv]
float64 err_vert# Track uncertainty (degrees) [epd]
float64 err_track# Ground speed uncertainty (meters/second) [eps]
float64 err_speed# Vertical speed uncertainty (meters/second) [epc]
float64 err_climb# Temporal uncertainty [ept]
float64 err_time# Orientation uncertainty (degrees)
float64 err_pitch
float64 err_roll
float64 err_dip# Position covariance [m^2] defined relative to a tangential plane
# through the reported position. The components are East, North, and
# Up (ENU), in row-major order.float64[9] position_covarianceuint8 COVARIANCE_TYPE_UNKNOWN = 0
uint8 COVARIANCE_TYPE_APPROXIMATED = 1
uint8 COVARIANCE_TYPE_DIAGONAL_KNOWN = 2
uint8 COVARIANCE_TYPE_KNOWN = 3uint8 position_covariance_type1.4 sensor_msgs::Imu
官方介绍: sensor_msgs::Imu
std_msgs/Header header
geometry_msgs/Quaternion orientation
float64[9] orientation_covariance
geometry_msgs/Vector3 angular_velocity
float64[9] angular_velocity_covariance
geometry_msgs/Vector3 linear_acceleration
float64[9] linear_acceleration_covariance
二、部分源码
2.1 相关的依赖和库
Eigen——计算四元数
Protobuf——结构数据序列化
autoware——信息格式
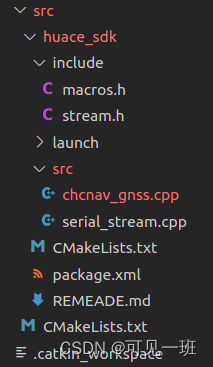
2.2 文件结构
ROS工作空间的include包括两个头文件,src下有两个cpp文件,由launch文件启动。
2.3 字段分割函数
把GPCHC数据流分割成一个一个的字段,然后进行相应的定义
void supersplit(const std::string& s, std::vector<std::string>& v, const std::string& c)
{std::string::size_type pos1, pos2;size_t len = s.length();pos2 = s.find(c);pos1 = 0;while(std::string::npos != pos2){if("" == s.substr(pos1, pos2-pos1)){v.emplace_back("0");}else{v.emplace_back(s.substr(pos1, pos2-pos1));}pos1 = pos2 + c.size();pos2 = s.find(c, pos1);}if(pos1 != len)v.emplace_back(s.substr(pos1));
}
typedef enum GNSS_GPCHC_INDEX{GNSS_GPCHC_INDEX_HEADER = 0,GNSS_GPCHC_INDEX_GPSWEEK,GNSS_GPCHC_INDEX_GPSTime,GNSS_GPCHC_INDEX_HEADING,GNSS_GPCHC_INDEX_PICH,GNSS_GPCHC_INDEX_ROLL,GNSS_GPCHC_INDEX_GRRO_X,GNSS_GPCHC_INDEX_GRRO_Y,GNSS_GPCHC_INDEX_GRRO_Z,GNSS_GPCHC_INDEX_ACC_X,GNSS_GPCHC_INDEX_ACC_Y,GNSS_GPCHC_INDEX_ACC_Z,GNSS_GPCHC_INDEX_LAT,GNSS_GPCHC_INDEX_LON,GNSS_GPCHC_INDEX_ALT,GNSS_GPCHC_INDEX_VE,GNSS_GPCHC_INDEX_VN,GNSS_GPCHC_INDEX_VU,GNSS_GPCHC_INDEX_SPEED,GNSS_GPCHC_INDEX_NSV1,GNSS_GPCHC_INDEX_NSV2,GNSS_GPCHC_INDEX_STATUS,GNSS_GPCHC_INDEX_AGE,GNSS_GPCHC_INDEX_WARMING,GNSS_GPCHC_INDEX_MAX
}GNSS_GPCHC_INDEX;
2.4 定义消息话题
定义五种格式:
- sensor_msgs::NavSatFix message_NavSatFix;
- gps_common::GPSFix message_gpsfix;
- sensor_msgs::Imu message_imu;
- geometry_msgs::PoseStamped angle_qua; //欧拉角和四元数
- geometry_msgs::PoseStamped lla_qua; //经纬高和四元数
发布ROS话题
imu_raw_pub = nh_.advertise<sensor_msgs::Imu>("/imu_raw", 500);nav_sat_fix_pub = nh_.advertise<sensor_msgs::NavSatFix>("/nav_sat_fix", 500);gps_fix_pub = nh_.advertise<gps_common::GPSFix>("/gps_fix", 500);angle_qua_pub = nh_.advertise<geometry_msgs::PoseStamped>("/angle_qua", 500);lla_qua_pub = nh_.advertise<geometry_msgs::PoseStamped>("/lla_qua", 500);
相关文章:
华测导航GPCHC协议ROS驱动包,CGI610、410接收机,NavSatStatus、GPSFix和普通格式
目录一、消息类型1.1 sensor_msgs/NavSatFix1.2 sensor_msgs/NavSatStatus1.3 gps_common::GPSFix1.4 sensor_msgs::Imu二、部分源码2.1 相关的依赖和库2.2 文件结构2.3 字段分割函数2.4 定义消息话题Ubuntu 20.04 noetic 华测CGI 610——RS232-C——GPCHC 一、消息类型 1.1 …...
)
算法实战应用案例精讲-【图像处理】Pillow图像处理(python代码实战)
目录 操作图像 计算机图像基础 颜色和RGBA值 坐标和 Box 元组 CMYK 和 RGB着色...

C语言通讯录【动态+文件】
目录定义结构体基础操作部分文件操作部分定义结构体 我们要做一个通讯录,里面的信息有一个人的名字,年龄,性别,地址和电话号 对于姓名,年龄等字符串,为了日后方便调整其长度,需要预定义一下它…...
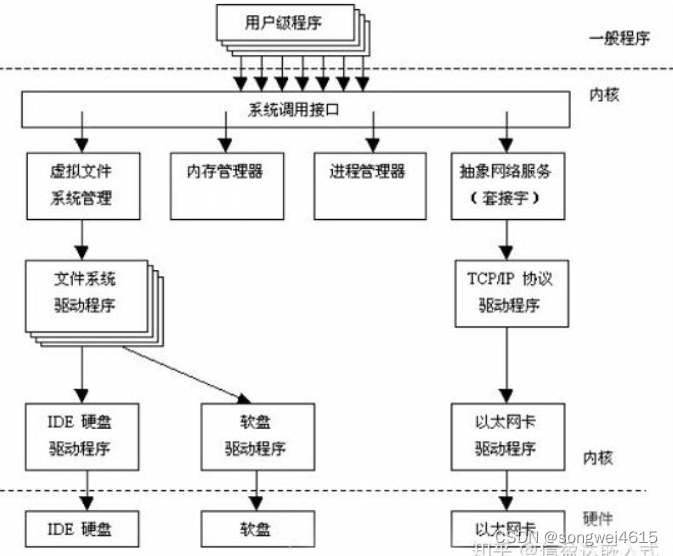
Linux驱动开发详细解析
Linux驱动开发详细解析 驱动概念 驱动与底层硬件直接打交道,充当了硬件与应用软件中间的桥梁。 具体任务 读写设备寄存器(实现控制的方式)完成设备的轮询、中断处理、DMA通信(CPU与外设通信的方式)进行物理内存向虚…...

Java Character 类,超详细整理,适合新手入门
目录 一、什么是Java Character 类? 二、Character类有哪些常用的静态方法? 1、将一个字符分别转换为大写字母和小写字母 2、如何判断一个字符是否是数字? 3、如何将一个字符转换为数字? 4、如何将一个字符串转换为字符数组…...

Python量化入门:关于收益率的一些概念
今天我们简单地介绍关于收益率的一些概念,方便大家理解我们后续的量化教程的分享。这些都很简单,但是请有经验的读者理解,毕竟有些读者没有这些基础,后边理解起来可能会有些吃力。 一、收益率简介 在金融领域,收益率是我们耳熟能详的一个名词。资产的收益率是指投入资产…...

微搭使用笔记(三) 数据模型介绍及初步使用
基于数据模型实现表单页面的生成和数据的保存、查看 表单应用是微搭的一个重要的使用场景,我们举下面一个简单的问卷调查的例子: 基于以上问卷,本文我们采取数据模型的方式生成表单页面并完成数据的保存及查看。 数据模型概述 先看下官方文档对于数据…...

JavaScript刷LeetCode心得
各类题的解决方案 话不多说,系统整理下解题的一些算法和解决方案 二叉树 二叉树大多使用递归的方式左右两个元素向下递归。比如: 计算二叉树最大深度 var maxDepth function (root) {if (root null) return 0return 1 Math.max(maxDepth(root.le…...
浙江工商大学2023年硕士研究生 入学考试初试成绩查询通知及说明
根据往年的情况,2023浙江工商大学MBA考试初试成绩可能将于2月21日下午两点公布,为了广大考生可以及时查询到自己的分数,杭州达立易考教育为大家汇总了信息。一、成绩查询考生可以登录中国研究生招生信息网(http://yz.chsi.com.cn/…...
)
华为OD机试题 - 子序列长度(JavaScript)
最近更新的博客 华为OD机试题 - 任务总执行时长(JavaScript) 华为OD机试题 - 开放日活动(JavaScript) 华为OD机试 - 最近的点 | 备考思路,刷题要点,答疑 【新解法】 华为OD机试题 - 最小步骤数(JavaScript) 华为OD机试题 - 任务混部(JavaScript) 华为OD机试题 - N 进…...
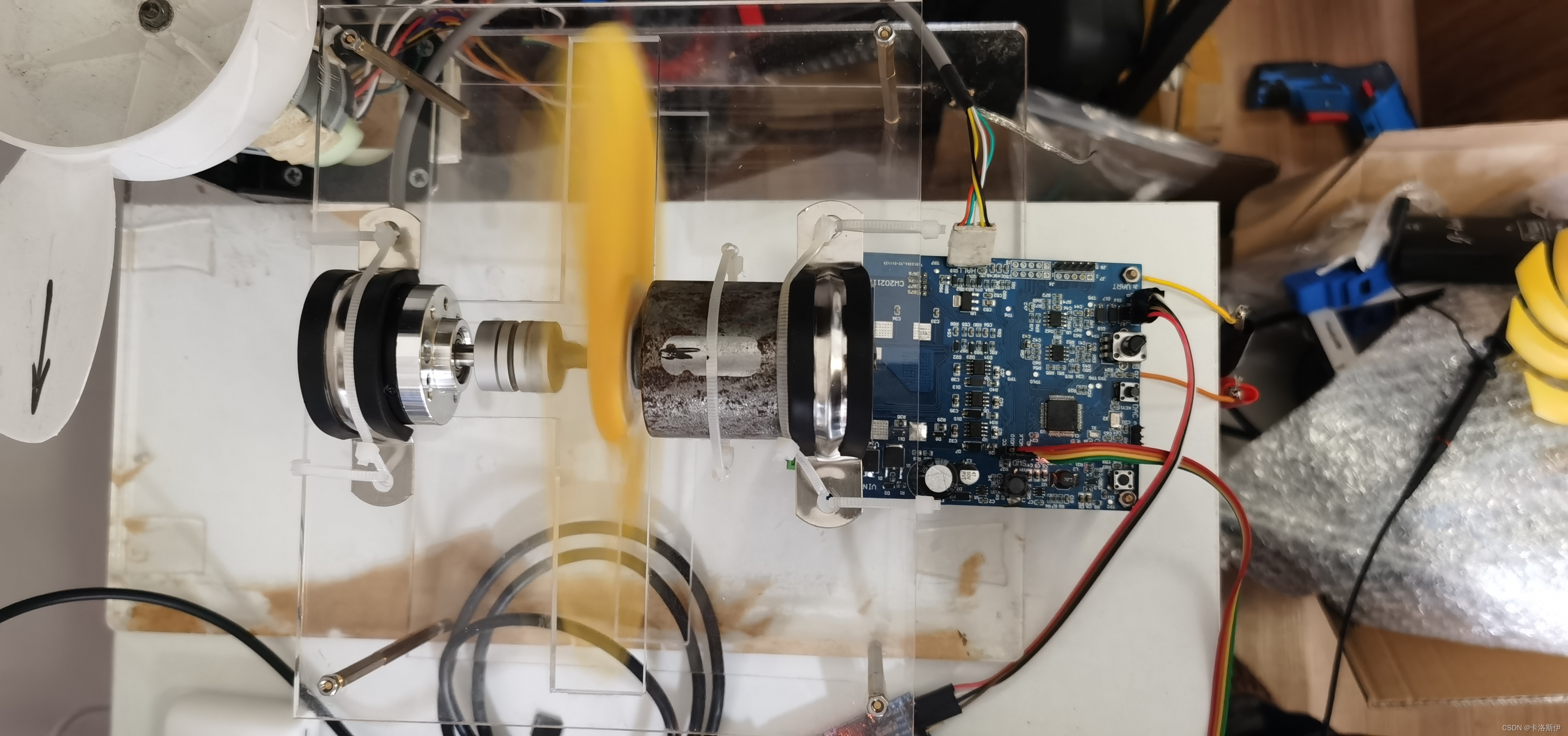
Simulink 自动代码生成电机控制:STM32 Encoder编码器使用总结
目录 Encoder 原理 STM32 Encoder 计数原理 模型仿真 模拟Encoder 基于Encoder计算角度和速度 关于启动的仿真 代码生成 运行演示 总结 总结一下基于STM32的Encoder接口的电机运行,相应的仿真和实验都是基于一个1024脉冲的增量式光电编码器,关于…...

《计算机系统基础》——计算机系统导论
文章目录《计算机系统基础》——计算机系统导论计算机的基本组成程序开发与执行过程机器语言汇编语言高级语言程序的转换处理程序的数据流动计算机系统层次结构早期计算机系统1GL2GL现代计算机系统3GL4GL指令集体系结构《计算机系统基础》——计算机系统导论 🚀接下…...
 | 机试题算法思路 【2023】)
华为OD机试 - 获取最大软件版本号(JavaScript) | 机试题算法思路 【2023】
获取最大软件版本号 题目 Maven版本号定义,<主版本>.<次版本>.<增量版本>-<里程碑版本> 举例3.1.4-beta 其中,主版本和次版本都是必须的,主版本,次版本,增量版本由多位数字组成,可能包含前导零,里程碑版本由字符串组成。 <主版本>.<…...
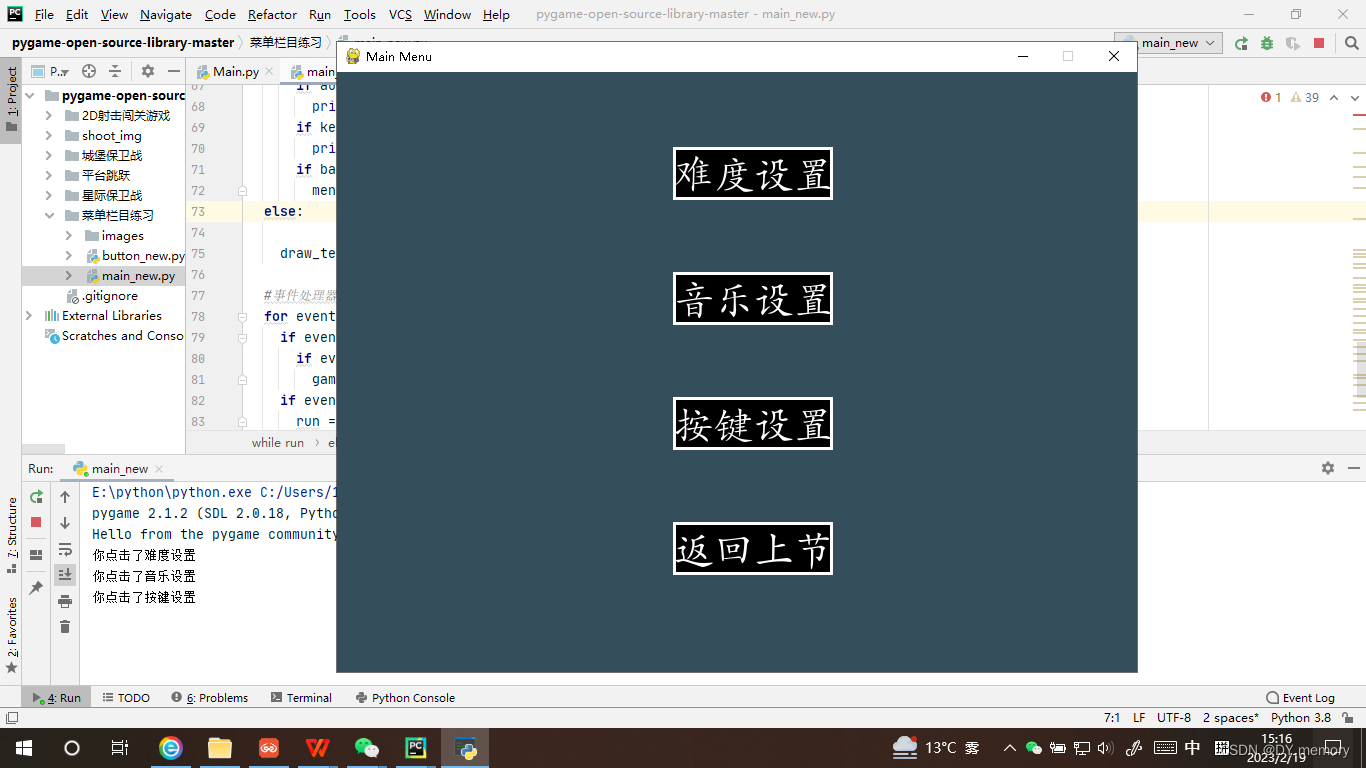
python--pygame实现各级菜单栏目设置
随着学期的开始,同学们也即将进入计算机相关课程的课程设计了,对于python课程设计的小伙伴,可能有些是需要利用pygame来写应该小游戏的,因为最近很多小伙伴同学也在想我要一些基于python的pygame模块做的游戏项目,此外…...

C++Primer15.3节练习
练习15.11: debug定义如下所示: //基类 class Quote { public:Quote() default;Quote(const std::string& book,double sales_price):bookNo(book),price(sales_price){ }std::string isbn()const { return bookNo; }virtual double net_price(st…...

解决实际项目中stalled时间过久的问题
背景 在公司参与了一个做度量统计的项目,该项目的特点是页面上的表格、卡片、图标非常多。项目经常出现一种情况:页面加载速度较慢,开始怀疑是由于计算量较大,后端接口相应速度较慢。优化了一版后端接口后(加缓存、优…...

vim编辑器
目录 前言 1.下载安装vim 2.三种模式互换 3.vim配置 前言 vim是从 vi 发展出来的一个文本编译器。 代码补完、编译及错误跳转等方便编程的功能特别丰富,在程序员中被广泛使用。 简单的来说, vi 是老式的字处理器,不过功能已经很齐全了&am…...
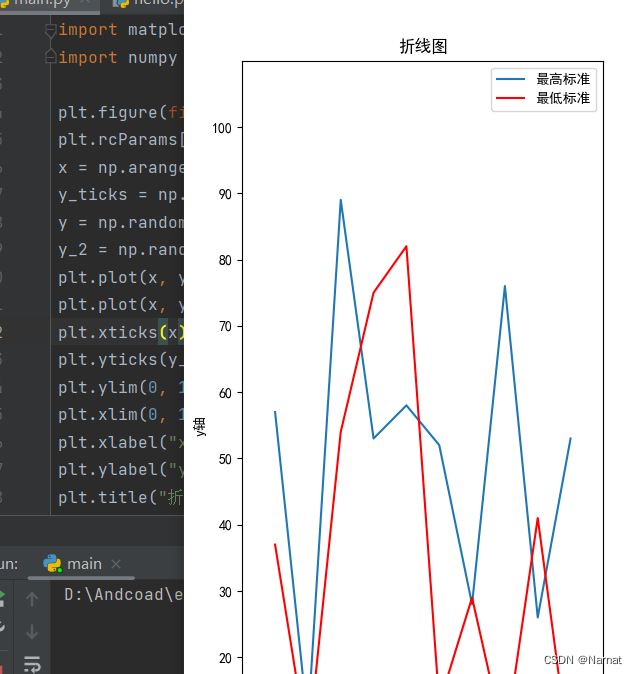
Python 使用 pip 安装 matplotlib 模块(秒解版)
长话短说:本人下载 matplotlib 花了大概三个半小时屡屡碰壁,险些暴走。为了不让新来的小伙伴走我的弯路,特意创作本片文章指明方向。 1.首先需要下载 python 我直接是在电脑自带的软件商店里下载的,图方便,当然在官网下…...
- 总览)
python-openCV—入门到精通系列讲解(配效果图)- 总览
前言: python-openCV是一种强大的计算机视觉库,可用于处理图像和视频等多媒体数据。它可以帮助您快速处理和分析图像和视频数据,并且在计算机视觉领域具有广泛的应用。在学习python-openCV时,一个速查手册是一个必不可少的工具。 你可以当本专栏当做一个速查手册,可以看…...
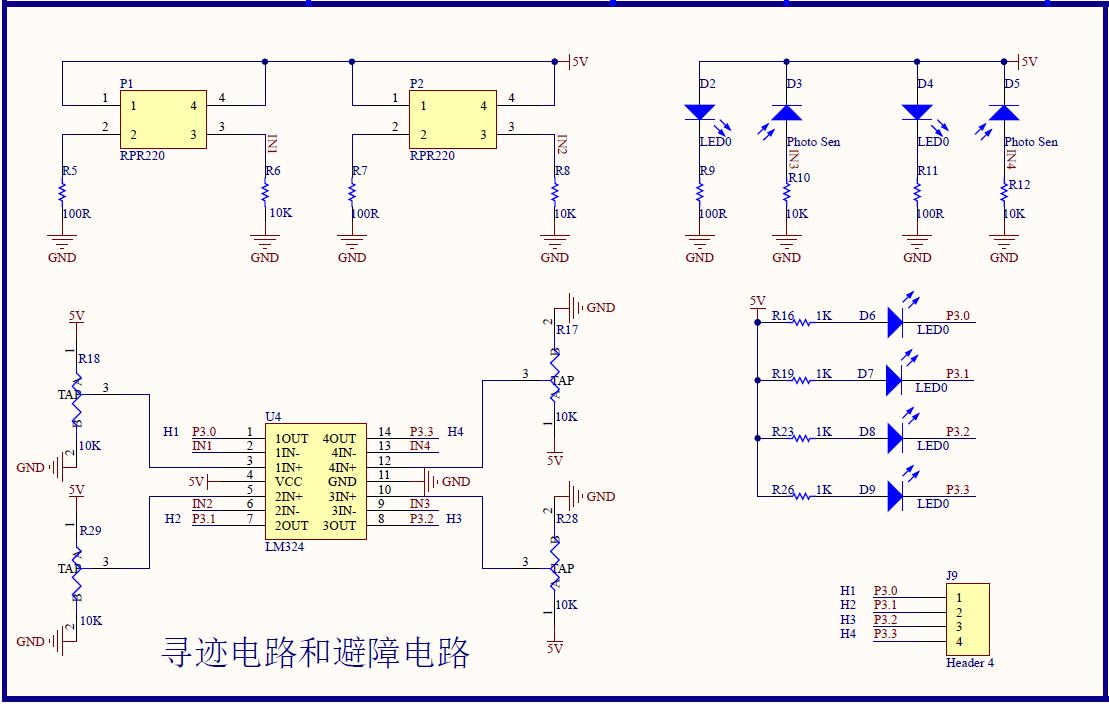
智能小车红外避障原理
红外避障电路红外避障电路由电位器R17,R28;发光二极管D8,D9;红外发射管 D2,D4和红外接收管D3,D5和芯片LM324等组成,LM234用于信号的比较,并产生比较结果输出给单片机进行处理。智能小车红外避障…...

AI VTuber技术栈全解析:从Live2D到GPT-SoVITS的实战搭建指南
1. 项目概述:为什么我们需要一份AI VTuber的“Awesome”清单? 如果你最近在GitHub、B站或者一些技术社区里逛过,大概率会看到一个词反复出现: AI VTuber 。它不再是科幻电影里的概念,而是正在快速渗透到直播、内容创…...

从系统光标到个性化指针:动漫主题鼠标指针的完整实现指南
1. 项目概述:从“二次元”到“生产力”的鼠标指针革命如果你和我一样,每天有超过8小时的时间与电脑为伴,那么鼠标指针就是你最亲密的“数字伙伴”。它可能是一个单调的白色箭头,也可能是一个乏味的沙漏。但你想过吗?这…...

国产替代浪潮下,琳科森:深耕半导体封装胶膜,做 “小而精” 的硬核材料企业
在半导体产业链中,封装制程用功能性胶膜是保障芯片良率与可靠性的关键基础材料。长期以来,高端 UV 减粘膜、晶圆划片膜等产品高度依赖进口,国内企业面临技术壁垒高、洁净制造门槛大、配方体系复杂等挑战。江苏琳科森材料科技有限公司…...

接手遗留系统第一周,我做了三件事,团队从此不再怕改老代码
刚跳槽到新公司,技术总监在入职谈话时递给我一杯咖啡,语气沉重地说:“我们最核心的交易系统已经跑了八年,负责它的老张去年离职了。现在整个团队没人敢动里面的代码,每次改需求都像在拆炸弹。”他停顿了一下࿰…...

Linux内核构建自动化:jpoindexter/kern工具实战指南
1. 项目概述:一个被低估的Linux内核构建工具 如果你和我一样,长期在嵌入式开发、内核模块调试或者需要频繁定制Linux内核的岗位上工作,那么你一定对内核的配置、编译、打包这一套繁琐的流程感到又爱又恨。爱的是,这是深入理解操作…...

Arm Cortex-A78处理器仿真技术与Iris架构实践
1. Arm Cortex-A78AE/A78C处理器仿真技术解析在半导体设计领域,处理器仿真技术已经成为芯片开发流程中不可或缺的关键环节。作为Armv8.2-A架构的代表性产品,Cortex-A78AE和A78C处理器采用了创新的Iris组件体系进行建模,这种基于指令集架构(IS…...

别再只堆叠4层了!用DenseGCN构建超深图网络,点云分割mIoU提升实战
突破GCN深度瓶颈:DenseGCN在点云分割中的实战优化指南 传统图卷积网络(GCN)通常被限制在3-4层的浅层架构中,这种深度限制严重制约了其在点云分割等复杂任务中的表现。本文将揭示如何通过密集连接(Dense Connections&am…...

okbiye AI 写作新思路:毕业论文终稿一站式落地,不用熬夜硬熬
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 开篇引言 每到毕业季,毕业论文总会成为无数大学生最头疼的一道关卡。选题没方向、框架搭不起来、正文写不出深度、重复率居高不…...
从零实现大语言模型:Transformer架构、自注意力机制与PyTorch实战
1. 项目概述:从零构建大语言模型的实践指南 最近几年,大语言模型(LLM)无疑是技术领域最耀眼的存在。从ChatGPT的横空出世到各类开源模型的百花齐放,它们展现出的理解和生成能力令人惊叹。然而,对于许多开发…...

METSO A413150输出模块
METSO A413150 是美卓(Metso Automation)BIU 8 分布式控制系统中的一款输出模块,主要用于向现场执行机构输出模拟量控制信号。中间15个特点METSO A413150 提供8通道模拟量输出,适用于多路控制信号输出。该模块分辨率为16位&#x…...