从0开始yolov8模型目标检测训练
从0开始yolov8模型目标检测训练
1 大环境
首先有大环境,即已经准备好了python、nvidia驱动、cuda、cudnn等。
2 yolov8的虚拟环境
2.1 创建虚拟环境
conda create -n yolov8 python=3.10
2.2 激活虚拟环境
注意:激活虚拟环境的时候,需要清楚自己创建的虚拟环境(yolov8)是在root权限下,还是在user权限下,否则,当使用source activate yolov8激活环境的时候,可能一直会提示Could not find conda environment: yolov5s;You can list all discoverable environments with conda info --envs
source activate yolov8
# 如果是windows的话,使用
conda activate yolov8
# 关闭虚拟环境
source deactivate yolov8
# 删除虚拟环境
conda remove -n yolov8 --all
# 删除虚拟环境中的某个包
conda remove --name $yolov8 $package_name
# 添加conda的清华镜像源
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn
其它:普通用户和root用户权限相互切换的方法:
exit
或
su user(user是自己安装时的用户名)
2.3 在虚拟环境中安装yolov8的必要依赖项
进入yolov8项目的根目录下
cd MyTrain/ultralytics-main
然后,使用Pip在一个Python>=3.8环境中安装ultralytics包,此环境还需包含PyTorch>=1.7。同时也会安装所有必要的requirements.txt。
pip install ultralytics
3 准备数据集
3.1 数据集介绍
采用26058张图片,标签文件是之前用标注精灵标注导出的json文件。
3.2 标签统计
统计标注文件包含的标签类别及数量如下
'suv': 19843, 'car': 222010, 'van': 8538, 'bigtru': 11775, 'bus': 7733, 'tralight': 32538, 'tricycle': 9454, 'elec': 45199, 'pedes': 36552, 'smatru': 2281, 'bike': 7908, 'coach': 443, 'tank': 2659, 'pickup': 943, 'trailer': 438, 'mpv': 1839, ' car': 1354, ' ca r': 1, 'elec ': 12, 'moto': 843, 'crane': 173, 'warm': 151644, 'percycle': 127, 'engine': 157, 'polic': 398, 'coni': 9758, 'pedesd': 13, 'van ': 1, 'motopoli': 22, 'escort': 26, 'tralight ': 1, 'right': 78, 'left': 114, 'stopline': 4, 'zebraline': 78, 'bull': 19, 'excava': 4, 'suv ': 2, 'zebraliner': 1, 'car ': 3, ' ': 1, 'car ': 1, 'ambu': 168, 'sanJiaoWarm': 778, 'suLiaoDao': 506, 'zhiXiang': 1248, 'suLiaoDai': 414, 'lunTai': 643, 'yiZi': 20, 'ar': 1, ' car': 141, 'bus-c': 2, 'elerc': 1, 'pedes ': 1, 'pedesr': 3, 'carr': 1, 'bigtrur': 2, 'elecr': 12, 'suvr': 72,
上述标签类别解释:上述存在的一些奇怪标签,如’carr’、‘bigtrur’、'pedes ‘等很显然是由于误输入’r’或空格字符导致的,故在转换为yolov5的标注格式的时候,需考虑在内。故采用映射如下,得到标签及ID。其中标签’sanJiao Warm’, ‘suLiaoDao’, ‘zhiXiang’, ‘suLiaoDai’, ‘lunTai’, 'yiZi’等标签不作为训练。
{'suv': 1, 'car': 1, 'van': 1, 'bigtru': 3, 'bus': 2, 'tralight': 9, 'tricycle': 6, 'elec': 5, 'pedes': 0, 'smatru': 3, 'bike': 4, 'coach': 2, 'tank': 3, 'pickup': 1, 'trailer': 3, 'mpv': 1, ' car': 1, ' ca r': 1, 'elec ': 5, 'moto': 5, 'crane': 3, 'warm': 8, 'engine': 3, 'polic': 10, 'coni': 7, 'pedesd': 0, 'van ': 1, 'motopoli': 5, 'escort': 3, 'tralight ': 9, 'bull': 3, 'excava': 3, 'suv ': 1, 'car ': 1, 'car ': 1, 'ambu': 10, 'ar': 1, ' car': 1, 'bus-c': 2, 'elerc': 5, 'pedes ': 0, 'pedesr': 0, 'carr': 1, 'bigtrur': 3, 'elecr': 5, 'suvr': 1}
标签重新分配如下
pedes: 0, car: 1, bus: 2, truck: 3, bike: 4, elec: 5, tricycle: 6, coni: 7, warm: 8, tralight: 9, special_vehicles: 10
3.3 转为yolov8的txt
yolov8的标签文件和yolov5是一样的,需要归一化(0-1)的目标类型、 Box中心点坐标x、Box中心点坐标y、Box宽、Box高
--datasTrain
------train_list.txt # 包含训练每张图片的路径
------val_list.txt
------test_list.txt
------images
----------train # 存放训练数据集的图片(.jpg)
----------val
----------test
------labels
----------train # 存放训练图片对应的标签文件(.txt)
----------val
----------tes
datasTrain/labels/train目录下的文件示例,如下为data220829_0001.jpg对应的data220829_0001.txt的前6行内容。
2 0.29427 0.33842 0.19479 0.27685
3 0.11380 0.56111 0.22760 0.43703
3 0.39479 0.41064 0.11041 0.17314
1 0.39401 0.29490 0.02760 0.06759
1 0.40729 0.25833 0.05 0.07222
1 0.61875 0.16574 0.02604 0.04444
4 准备训练
4.1 模型的配置文件
修改路径下的配置文件 ultralytics-main/ultralytics/yolo/cfg/default.yaml 参数,以执行相应的操作(train、val、test)。
yolo/cfg/default.yaml 中如下参数需设置或查验与任务是否一致(包含训练模式示例值)
task: detect # inference task, i.e. detect, segment, classify
mode: train # YOLO mode, i.e. train, val, predict, export# Train settings -------------------------------------------------
# model 使用.pt文件是通过预训练模型
# model: ./preDetectModel/yolov8s.pt
# model 使用.yaml文件是从头开始训练,使用COCO模型来预训练口罩检测不可取,必须从头训练
model: D:/yolov5train/yolov8_main/ultralytics/models/v8/yolov8s.yaml
# data: path to data file, i.e. coco128.yaml
data: D:/yolov5train/yolov8_main/ultralytics/yolo/v8/detect/data/my_yolov8.yaml
epochs: 300 # number of epochs to train for
patience: 50 # epochs to wait for no observable improvement for early stopping of training
batch: 2 # number of images per batch (-1 for AutoBatch)
imgsz: 960 # size of input images as integer or w,h
save: True # save train checkpoints and predict results
save_period: 10 # Save checkpoint every x epochs (disabled if < 1,设为-1则禁用保存检查点)single_cls: False # train multi-class data as single-class
rect: True # support rectangular train/val if mode='train'/'val'
resume: False # resume training from last checkpoint
上述参数详解参考博客:https://blog.csdn.net/weixin_45277161/article/details/131047101
其中模型的配置文件位于ultralytics-main/ultralytics/models/v8/yolov8s.yaml ,该文件包含主要内容如下:
# Parameters
nc: 11 # number of classesscales: # model compound scaling constants
# [depth, width, max_channels]
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs# YOLOv8.0n backbone
backbone:
# YOLOv8.0n head
head:
4.2 数据的配置文件
数据集的配置文件模仿ultralytics-main/ultralytics/datasets/coco.yaml文件的写法,记为my_yolov8.yaml,该文件包含内容如下
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
path: D:/yolov5train/datasTrain3_More # dataset root dir
train: D:/yolov5train/datasTrain3_More/train_list.txt # train images (relative to 'path')
val: D:/yolov5train/datasTrain3_More/val_list.txt # val images (relative to 'path')
test: D:/yolov5train/datasTrain3_More/test_list.txt# Classes
names:0: pedes1: car2: bus3: truck4: bike5: elec6: tricycle7: coni8: warm9: tralight10: specialVehicle
4.3 train的.py文件
其实train.py文件中的参数在ultralytics-main/ultralytics/yolo/cfg/default.yaml中如果设置好了的话,就可以不用管了。如果没有设置/yolo/cfg/default.yaml的话,采用如下方式启动训练,否则,采用4.4所述的方式启动训练命令。
ultralytics-main/ultralytics$yolo task=detect mode=train model=models/v8/yolov8s.yaml data=/ultralytics/yolo/v8/detect/data/my_yolov8.yaml imgsz=960 batch=-1 epochs=300 patience=50 workers=4
# 同时也尽可以正确设置/yolo/cfg/default.yaml中的参数
4.4 训练命令
cd ultralytics-main/ultralytics/
yolo cfg=./yolo/cfg/default.yaml
相关文章:

从0开始yolov8模型目标检测训练
从0开始yolov8模型目标检测训练 1 大环境 首先有大环境,即已经准备好了python、nvidia驱动、cuda、cudnn等。 2 yolov8的虚拟环境 2.1 创建虚拟环境 conda create -n yolov8 python3.102.2 激活虚拟环境 注意:激活虚拟环境的时候,需要清…...

设计模式-抽象工厂模式
抽象工厂模式:该模式是对工厂模式的拓展,因为工厂模式中创建的产品都需要继承自同一个父类或接口,创建的产品类型相同,无法创建其他类型产品,所以抽象工厂模式对其进行拓展,使其可以创建其他类型的产品。 …...
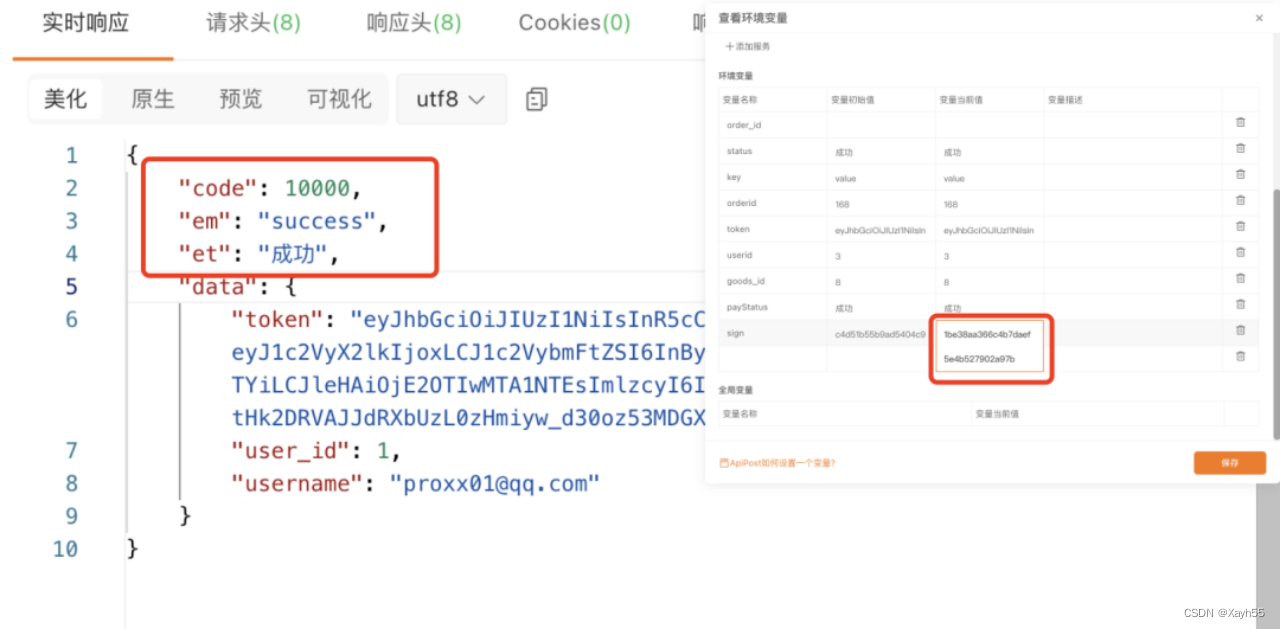
如何用Apipost实现sign签名?
我们平常对外的接口都会用到sign签名,对不同的用户提供不同的apikey ,这样可以提高接口请求的安全性,避免被人抓包后乱请求。 如何用Apipost实现sign签名? 可以在Apipost中通过预执行脚本调用内置的JS库去实现预执行脚本是在发送请求之前自…...
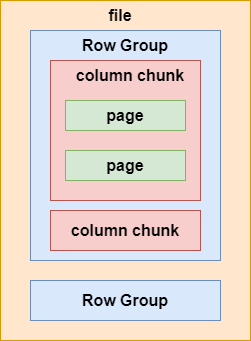
Hive底层数据存储格式
前言 在大数据领域,Hive是一种常用的数据仓库工具,用于管理和处理大规模数据集。Hive底层支持多种数据存储格式,这些格式对于数据存储、查询性能和压缩效率等方面有不同的优缺点。本文将介绍Hive底层的三种主要数据存储格式:文本文件格式、Parquet格式和ORC格式。 一、三…...
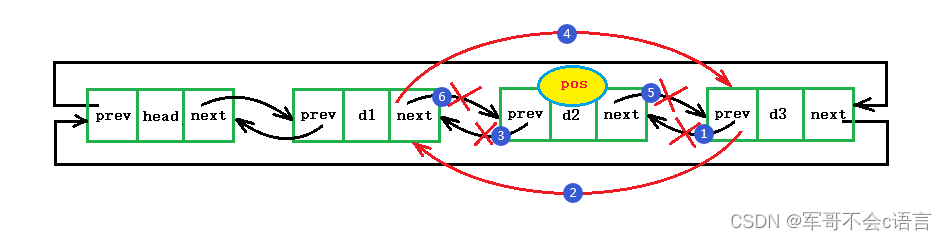
双向-->带头-->循环链表
目录 一、双向带头循环链表概述 1.什么是双向带头循环链表 2.双向带头循环链表的优势 3.双向带头循环链表简图 二、双向带头循环链表的增删查改图解及代码实现 1.双向带头循环链表的头插 2.双向带头循环链表的尾插 3.双向带头循环链表的头删 4.双向带头循环链表的尾删…...

Opencv4基于C++基础入门笔记:OpenCV环境配置搭建
文章目录: 一:软件安装 二:配置环境(配置完之后重启一下软件) 1.配置电脑系统环境变量 vs2012及其以下 vs2014及其以上 2.配置VS软件环境变量 vs2012及其以下 vs2014及其以上 三:测试 vs2012及其…...

JS基础之实现map方法
提示:内容虽少,但是里面也有好几个知识点。 step 1:实现函数 function mapTmp (fn){if(!Array.isArray(this) || !this?.length) return [];const arr [];this.forEach((item, index) > {const newItem fn(item, index, this);arr.pu…...
FPGA应用学习笔记-----复位电路(二)和小结
不可复位触发器若和可复位触发器混合写的话,不可复位触发器是由可复位触发器馈电的。 不应该出现的复位,因为延时导致了冒险,异步复位存在静态冒险 附加素隐含项,利用数电方法,消除静态冒险 这样多时钟区域还是算异步的…...
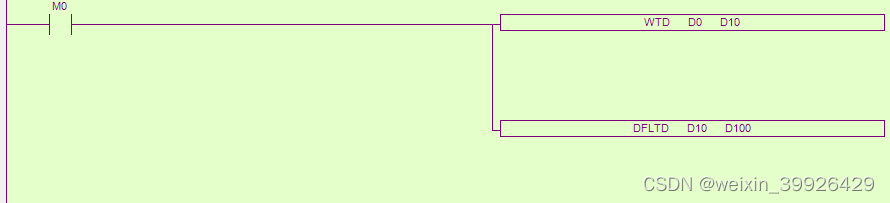
信捷 XD PLC 16位整数转换为双精度浮点数
完成16位整数转换为双精度浮点数,信捷XD PLC需要两个指令,逐步转换,一个指令搞不定。 具体的: 第1步:int16->int32 第2步:int32->Double 例子,比如说将D0转换成浮点数放到D100~D103...
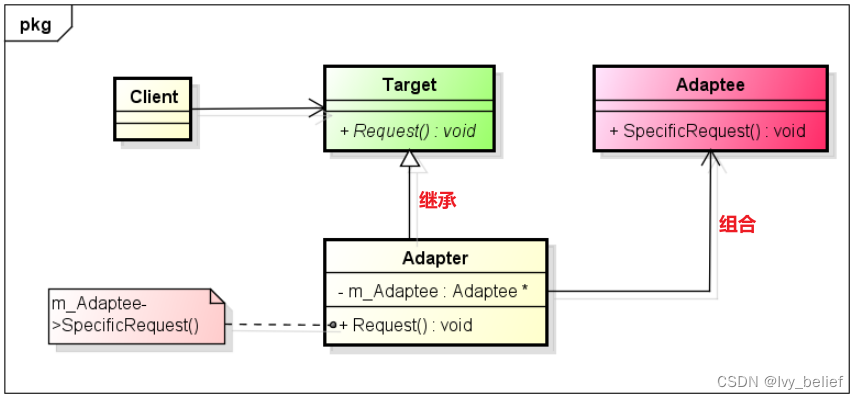
(二)结构型模式:1、适配器模式(Adapter Pattern)(C++实现示例)
目录 1、适配器模式(Adapter Pattern)含义 2、适配器模式应用场景 3、适配器模式的UML图学习 4、C实现适配器模式的示例 1、适配器模式(Adapter Pattern)含义 将一个接口转换为客户端所期待的接口,从而使两个接口…...
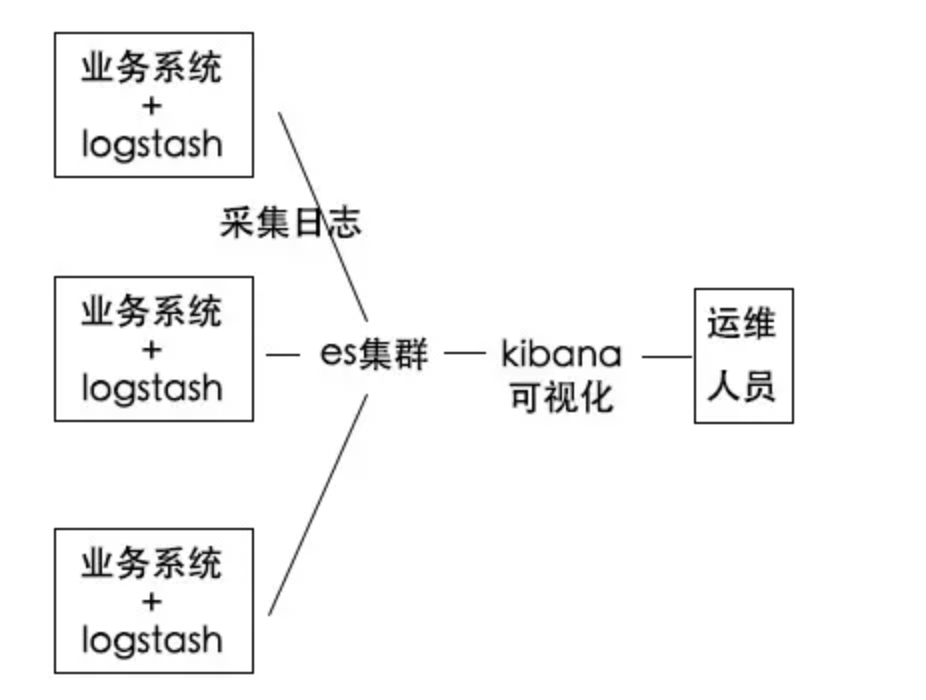
【编程二三事】ES究竟是个啥?
在最近的项目中,总是或多或少接触到了搜索的能力。而在这些项目之中,或多或少都离不开一个中间件 - ElasticSearch。 今天忙里偷闲,就来好好了解下这个中间件是用来干什么的。 ES是什么? ES全称ElasticSearch,是个基于Lucen…...
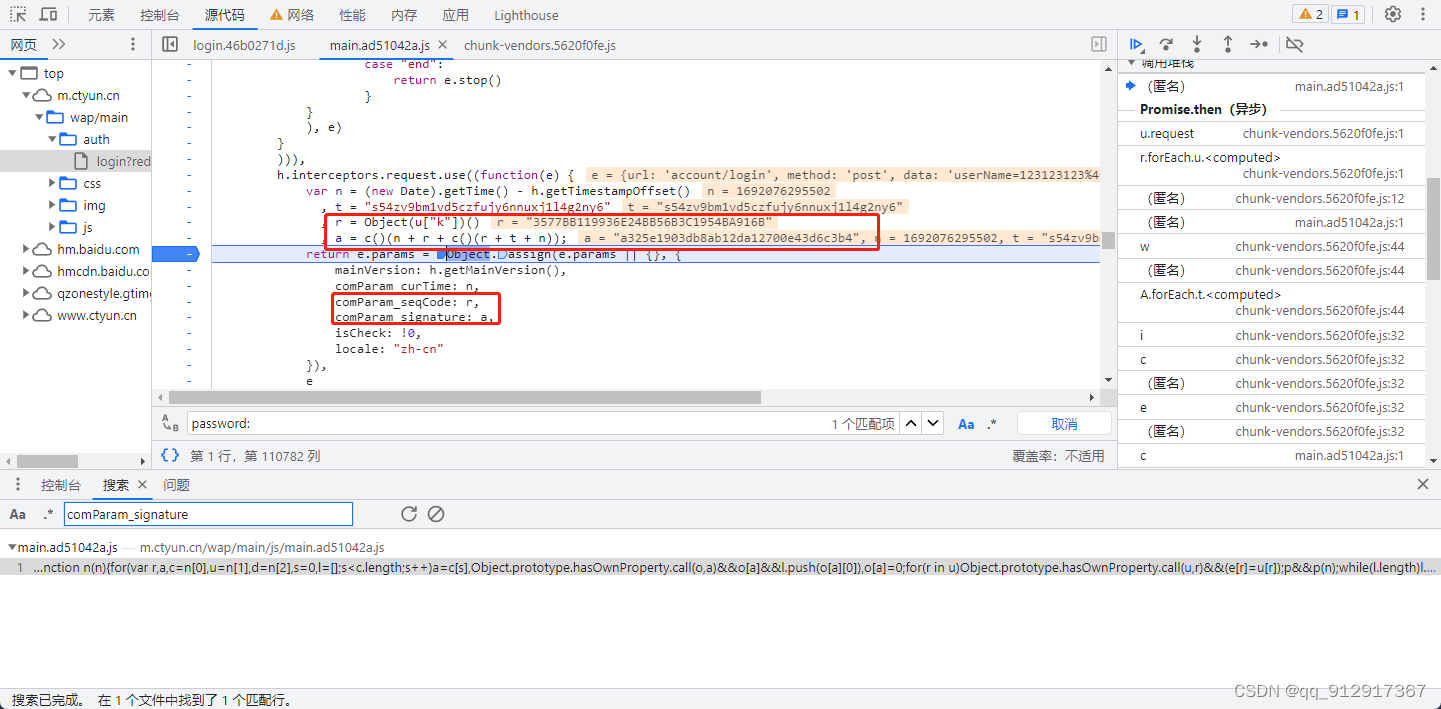
爬虫逆向实战(三)--天某云登录
一、数据接口分析 主页地址:天某云 1、抓包 通过抓包可以发现登录接口是account/login 2、判断是否有加密参数 请求参数是否加密? 通过“载荷”模块可以发现password、comParam_signature、comParam_seqCode是加密的 请求头是否加密? 无…...

不要过于迷恋软件架构,要重视如何设计根据简单和清晰的设计
1. 设计一个计算机系统的目标应该是简单性 。 系统越简单,理解起来就越简单,找到问题就越简单,实现它就越简单。描述的语言越清晰,设计就越容易理解。 干净的设计类似于干净的代码:它易于阅读且易于理解。 2. 如何编…...
Grafana监控 Redis Cluster
Grafana监控 Redis Cluster 主要是使用grafana来实现监控,grafana可以对接多种数据源,在官网中可以找到Redis数据源,需要安装redis data source插件。当然也可以利用Prometheus来做数据源,下面分别记录一下这两种数据源的安装配置…...
k8s 认证和权限控制
k8s 的认证机制是啥? 说到 k8s 的认证机制,其实之前咋那么也有提到过 ServiceAccouont ,以及相应的 token ,证书 crt,和基于 HTTP 的认证等等 k8s 会使用如上几种方式来获取客户端身份信息,不限于上面几种…...

性能优化的重要性
性能优化的重要性 性能优化的重要性摘要引言注意事项代码示例及注释性能优化的重要性 性能优化的重要性在 Java 中的体现响应速度资源利用效率扩展性与可维护性并发性能合理的锁策略线程安全的数据结构并发工具类的应用避免竞态条件和死锁 总结代码示例 博主 默语带您 Go to Ne…...

Leetcode No.53 Maximum Subarray
参考资料: 考点:子串 & 动态规划 & [题干] Input: nums [-2,1,-3,4,-1,2,1,-5,4] Output: 6 Explanation: The subarray [4,-1,2,1] has the largest sum 6.1. 心路历程 这道题非常经典,蕴含的思想也是精巧无比。 2. 正解 简单来说官…...
手机出现 不读卡 / 无信号时应该怎么办?
当手机屏幕亮起,一般在屏幕最上方都会有代表手机卡状态的显示,其中网络信号和读卡状态的标识,依旧有很多人分不太清,更不清楚改怎么办了。 1、当我们的手机里有两张卡时,则会有两个信号显示 2、信号状态一般是由短到…...
)
Linux 内核模块运行机制(10/11)
Linux 内核实现了一个比较酷的功能:支持模块的动态加载和运行。如果你实现了一个内核模块并打算运行它,你并不需要重启系统,直接使用 insmod 命令加载即可,这个模块就像补丁一样打进了 Linux 操作系统,并可以正常运行。…...

MySQL数据库-字符串函数详解
前言 MySQL数据库提供了多种不同类型的函数,用于处理字符串、日期、数值等数据类型,以及实现条件、聚合等操作,下面我们主要介绍字符串函数 CONCAT() 函数 CONCAT() 可用于将多个字符串连接在一起。 示例: SELECT CONCAT(Hell…...

无机布防火卷帘门价格怎么算?按尺寸定制,按需报价
无机布防火卷帘门作为建筑防火分区的核心设备,价格一直是工程采购的关注重点。很多用户在询价时,会发现不同厂家的报价差异较大,这是因为无机布防火卷帘门的价格并非按统一单价计算,而是完全根据项目的实际需求定制化核算。 &…...

LLM API安全攻防实战:从提示词注入到自动化测试方案
1. 项目概述:被忽视的LLM API安全前线最近在帮几个团队做上线前的安全审计,发现一个挺有意思的现象:大家对于传统API的鉴权、限流、SQL注入这些常规检查已经形成了肌肉记忆,但一旦涉及到LLM(大语言模型)的A…...

Godot中型项目工程化实践:目录规范、资源引用与状态管理
1. 这不是续集,而是项目落地的分水岭“Godot 游戏引擎项目(二)”——看到这个标题,很多人第一反应是:“哦,上一篇讲了环境搭建和Hello World,这篇该讲节点树和信号了?”但我在带三个…...

Tftpd32/Tftpd64不止是TFTP!手把手教你玩转它的DHCP和Syslog服务器功能
Tftpd32/Tftpd64:解锁DHCP与Syslog服务的隐藏潜力当大多数人提起Tftpd32/Tftpd64时,第一反应往往是它作为TFTP服务器的功能。这款轻量级工具确实在文件传输领域表现出色,但它的能力远不止于此。今天,我们将深入探索这款软件中两个…...

从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器
从理论推导到代码实现:手把手教你用Python/Numpy写出守恒形式的NS方程求解器计算流体力学(CFD)的魅力在于它将抽象的数学方程转化为可执行的代码,让流体运动的奥秘在计算机中重现。对于已经掌握流体力学理论的中高级学习者来说&am…...

告别虚频困扰:用VASP+DynaPhoPy搞定高温材料声子谱的保姆级教程
高温材料声子谱计算实战:从虚频困境到非谐解决方案 引言:虚频问题的根源与突破路径 在计算材料学领域,声子谱分析是理解材料动力学稳定性和热力学性质的核心手段。然而许多研究者都遭遇过这样的困境:对实验合成的材料进行简谐近似…...

Veo 2胶片质感生成器失效?——深度解析Color Science v2.3内核中被屏蔽的Cinematic Grain Injection层
更多请点击: https://kaifayun.com 第一章:Veo 2胶片质感生成器失效现象全景透视 近期大量用户反馈,Veo 2 胶片质感生成器在调用 generate_film_effect() 接口后返回空纹理、纯灰帧或 HTTP 503 Service Unavailable 错误,且该问题…...

潮州东方轻奢风全屋高定找哪家
开篇引言根据《2026年中国全屋定制行业发展报告》,潮州市全屋定制市场规模同比增长38%,其中全屋高端定制细分市场同比增长52%。目前,潮州市家庭全屋定制需求占比72%,高端定制需求占比45%。为了帮助潮州市消费者选择合规、靠谱、差…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

Windows终极PDF处理工具:3步免费安装Poppler完整指南
Windows终极PDF处理工具:3步免费安装Poppler完整指南 【免费下载链接】poppler-windows Download Poppler binaries packaged for Windows with dependencies 项目地址: https://gitcode.com/gh_mirrors/po/poppler-windows 你是否曾经为在Windows上处理PDF文…...