pcl欧式聚类
欧式聚类实现方法大致是:
1、找到空间中某点 p 1 p_1 p1,用KD-Tree找到离他最近的n个点,判断这n个点到 p 1 p_1 p1的距离。将距离小于阈值r的点 p 2 、 p 3 、 p 4 p_2、p_3、p_4 p2、p3、p4…放在类Q里
2、在 Q ( p 1 ) Q(p_1) Q(p1)里找到一点 p 2 p_2 p2 ,重复步骤1
3、在 Q ( p 1 , p 2 ) Q(p_1,p_2) Q(p1,p2)找到一点,重复步骤1,找到 p 22 、 p 23 p_{22}、p_{23} p22、p23… 全部放进Q里
4、当Q再也不能有新点加入了,则完成搜索了
使用pcl库的欧式聚类:
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction ec;
ec.setClusterTolerance (0.02); //设置近邻搜索的搜索半径为2cm
ec.setMinClusterSize (100);//设置一个聚类需要的最少点数目为100
ec.setMaxClusterSize (25000); //设置一个聚类需要的最大点数目为25000
ec.setSearchMethod (tree);//设置点云的搜索机制
ec.setInputCloud (cloud_filtered);
ec.extract (cluster_indices);//从点云中提取聚类,并将点云索引保存在cluster_indices中
//迭代访问点云索引cluster_indices,直到分割出所有聚类int j = 0;for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin (); it != cluster_indices.end (); ++it)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cluster (new pcl::PointCloud<pcl::PointXYZ>);//创建新的点云数据集cloud_cluster,将所有当前聚类写入到点云数据集中for (std::vector<int>::const_iterator pit = it->indices.begin (); pit != it->indices.end (); ++pit){cloud_cluster->points.push_back (cloud_filtered->points[*pit]);cloud_cluster->width = cloud_cluster->points.size ();cloud_cluster->height = 1;cloud_cluster->is_dense = true; }pcl::visualization::CloudViewer viewer("Cloud Viewer");viewer.showCloud(cloud_cluster);pause();
}pcl实现原理:
pcl::extractEuclideanClusters (const PointCloud<PointT> &cloud,const typename search::Search<PointT>::Ptr &tree,float tolerance, std::vector<PointIndices> &clusters,unsigned int min_pts_per_cluster,unsigned int max_pts_per_cluster)
{if (tree->getInputCloud ()->points.size () != cloud.points.size ()) // 点数量检查{PCL_ERROR ("[pcl::extractEuclideanClusters] Tree built for a different point cloud dataset (%lu) than the input cloud (%lu)!\n", tree->getInputCloud ()->points.size (), cloud.points.size ());return;}int nn_start_idx = tree->getSortedResults () ? 1 : 0;std::vector<bool> processed (cloud.points.size (), false);std::vector<int> nn_indices;std::vector<float> nn_distances; for (int i = 0; i < static_cast<int> (cloud.points.size ()); ++i) //遍历点云中的每一个点{if (processed[i])continue;std::vector<int> seed_queue;int sq_idx = 0;seed_queue.push_back (i); processed[i] = true;while (sq_idx < static_cast<int> (seed_queue.size ())) //遍历每一个种子{if (!tree->radiusSearch (seed_queue[sq_idx], tolerance, nn_indices, nn_distances)) {sq_idx++;continue;}for (size_t j = nn_start_idx; j < nn_indices.size (); ++j) {if (nn_indices[j] == -1 || processed[nn_indices[j]]) continue; seed_queue.push_back (nn_indices[j]); processed[nn_indices[j]] = true;}sq_idx++;}if (seed_queue.size () >= min_pts_per_cluster && seed_queue.size () <= max_pts_per_cluster){pcl::PointIndices r;r.indices.resize (seed_queue.size ());for (size_t j = 0; j < seed_queue.size (); ++j)r.indices[j] = seed_queue[j];std::sort (r.indices.begin (), r.indices.end ());r.indices.erase (std::unique (r.indices.begin (), r.indices.end ()), r.indices.end ());r.header = cloud.header;clusters.push_back (r);}}
}相关文章:

pcl欧式聚类
欧式聚类实现方法大致是: 1、找到空间中某点 p 1 p_1 p1,用KD-Tree找到离他最近的n个点,判断这n个点到 p 1 p_1 p1的距离。将距离小于阈值r的点 p 2 、 p 3 、 p 4 p_2、p_3、p_4 p2、p3、p4…放在类Q里 2、在 Q ( p 1 ) Q(p_1…...

macOS Ventura 13.5.1(22G90)发布(附黑/白苹果系统镜像地址)
系统镜像下载:百度:黑果魏叔 系统介绍 黑果魏叔 8 月 18 日消息,苹果今日向 Mac 电脑用户推送了 macOS 13.5.1 更新(内部版本号:22G90),本次更新距离上次发布隔了 24 天。 本次更新重点修复了…...

分布式监控平台——Zabbix
市场上常用的监控软件: 传统运维:zabbix、 Nagios 一、zabbix概述 作为一个运维,需要会使用监控系统查看服务器状态以及网站流量指标,利用监控系统的数据去了解上线发布的结果,和网站的健康状态。 利用一个优秀的监…...
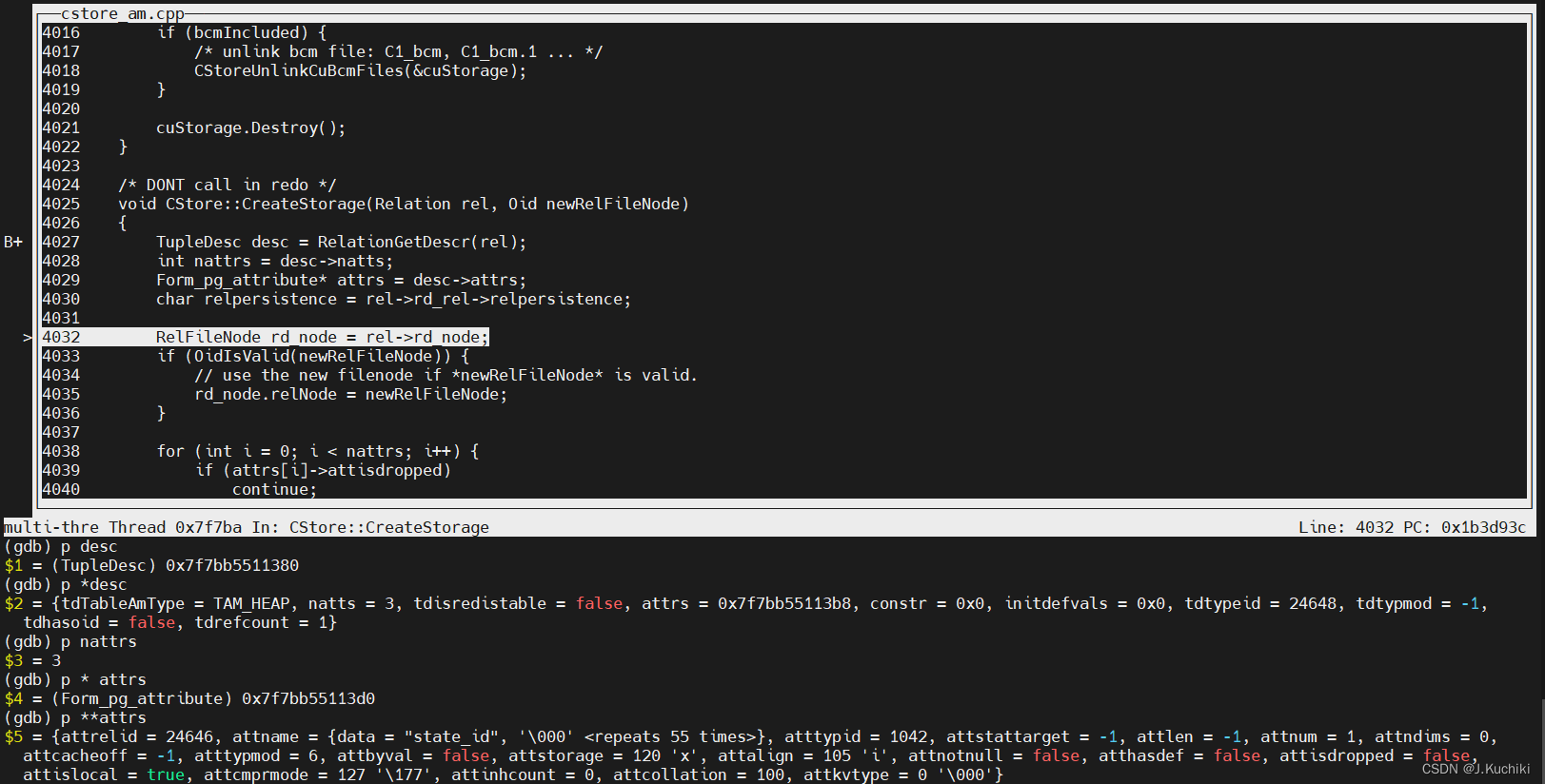
【OpenGauss源码学习 —— 列存储(创建表)】
列存储 什么是列存储?语法实现语法格式参数说明示例源码分析(创建表)语法层(Gram.y)子模块(utility.cpp) 总结 声明:本文的部分内容参考了他人的文章。在编写过程中,我们…...
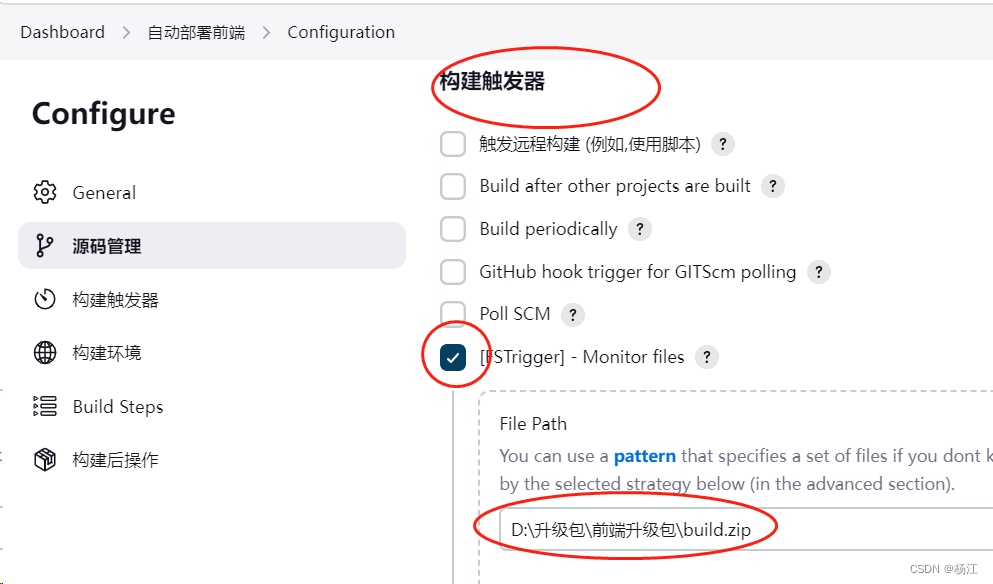
Jenkins 监控dist.zip文件内容发生变化 触发自动部署
为Jenkins添加plugin http://xx:xx/manage 创建一个任务 构建触发器 每3分钟扫描一次,发现指定文件build.zip文件的MD5发生变化后 触发任务...

Linux系列讲解 —— FTP协议的应用
简单介绍一下FTP文件传输协议在linux系统中的应用。 目录 0. 基本概念1. FTP Server1.1 安装FTP Server1.2 FTP Server开启和关闭1.3 查看FTP Server是否开启1.4 FTP服务器配置 2. FTP Client2.1 lftp2.2 ftp2.3 sftp2.4 文件资源管理器集成的ftp和sftp 3. ftp常用命令 0. 基本…...

Rancher-RKE-install 部署k8s集群
一、为什么用Rancher-RKE-install 1.CNCF认证的k8s安装程序。 2.有中文文档。 二、安装步骤 1.下载Rancher-Rke的二进制包-下面是项目的地址 GitHub - rancher/rke: Rancher Kubernetes Engine (RKE), an extremely simple, lightning fast Kubernetes distrib…...
PHP8的正则表达式-PHP8知识详解
在网页程序的时候,经常会有查找符合某些复杂规则的字符串的需求。正则表达式就是描述这些规则的工具。 正则表达式是把文本或者字符串按照一定的规范或模型表示的方法,经常用于文本的匹配操作。 例如:我们在填写手机号码的时候,…...
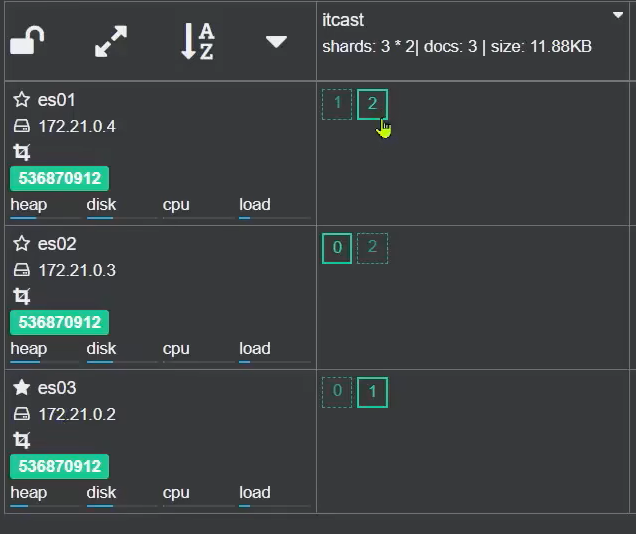
SpringCloud实用篇7——深入elasticsearch
目录 1 数据聚合1.1 聚合的种类1.2 DSL实现聚合1.2.1 Bucket聚合语法1.2.2 聚合结果排序1.2.3 限定聚合范围1.2.4 Metric聚合语法1.2.5.小结 1.3 RestAPI实现聚合1.3.1 API语法1.3.2 业务需求1.3.3 业务实现 2 自动补全2.1 拼音分词器2.2 自定义分词器2.3 自动补全查询2.4 实现…...

uni-app 经验分享,从入门到离职(二)—— tabBar 底部导航栏实战篇
文章目录 📋前言⏬关于专栏 🎯关于小程序 tabbar 的一些知识🎯创建一个基本的 tabBar📝最后 📋前言 这篇文章的内容主题是关于小程序的 tabBar 底部导航栏的入门使用和实战技巧。通过上一篇文章的基础,我们…...
:内存区域)
Java虚拟机(JVM):内存区域
一、内存区域介绍 Java虚拟机(JVM)内存可以分为以下几个区域: 程序计数器(Program Counter Register):用于记录当前线程执行的字节码指令的地址,属于线程私有的区域。在任意时刻,一…...
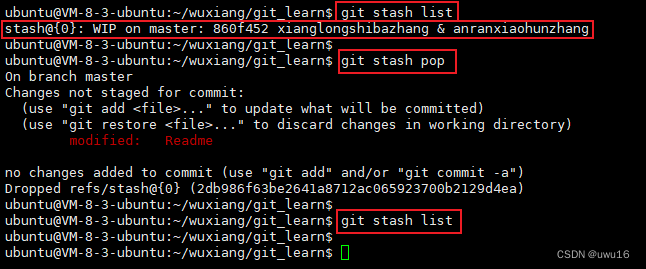
11 - git stash 开发中临时加塞了紧急任务怎么处理
查看所有文章链接:(更新中)GIT常用场景- 目录 文章目录 开发中临时加塞了紧急任务怎么处理 开发中临时加塞了紧急任务怎么处理 当你此时工作区已经修改了 Readme 文件,然后突然需要解决其他问题(紧急问题、新任务&…...

高效的WMS系统手持盘点方案
WMS系统手持盘点就是指利用WMS系统支持的手持式电子盘点设备进行库存盘点的方式。 具体来说: - 手持盘点设备是一种小型的电子设备,具有移动条形码扫描功能,可以实时与WMS系统联通。 - WMS系统利用手持设备,可以给仓储人员下发具体的盘点任务,例如需要盘点的货位、商品等信息…...

Oracle分页技术
1、使用两层嵌套 SELECT *FROM (SELECT A.*, ROWNUM RNFROM (SELECT * FROM edw_t100_bal_all) AWHERE ROWNUM < 40)WHERE RN > 21; 2、使用between..and.. SELECT *FROM (SELECT A.*, ROWNUM RN FROM (SELECT * FROM edw_t100_bal_all) A)WHERE RN between 21 and 40…...

2023-08-15 Untiy进阶 C#知识补充6——C#7主要功能与语法
文章目录 一、字面值改进二、out 内部声明 / 弃元三、ref 返回值四、本地函数五、抛出表达式六、元组七、模式匹配 注意:在此仅提及 Unity 开发中会用到的一些功能和特性,对于不适合在 Unity 中使用的内容会忽略。 C# 7 对应 Unity 版本࿱…...
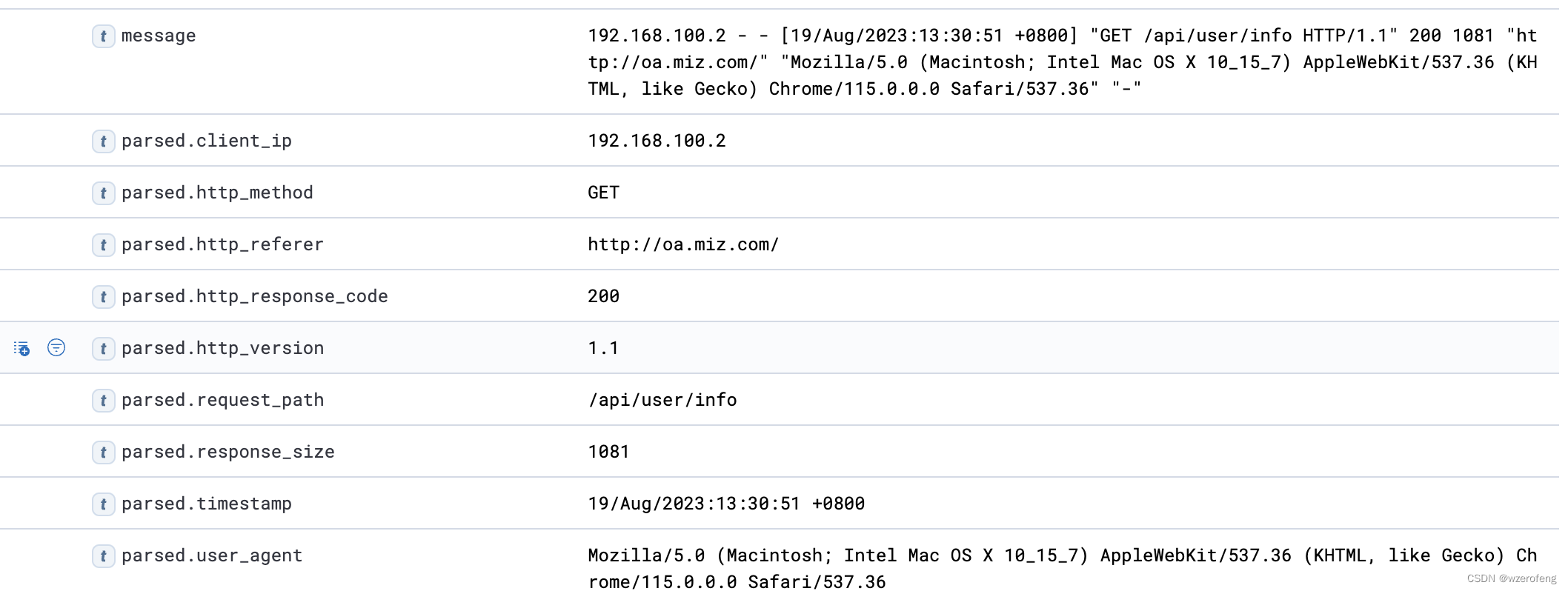
logstash配置文件
input { kafka { topics > “xxxx” bootstrap_servers > “ip:port” auto_offset_reset > “xxxx” group_id > “xxxx” consumer_threads > 3 codec > “json” } } filter { grok { match > { “message” > ‘%{IP:client_ip} - - [%{HTTPDATE:…...
)
docker搭建lnmp(nginx+mysql57+php7.4)
docker搭建lnmp(nginxmysql57php7.4) 1. 准备工作 docker安装 $ sudo yum update $ sudo sudo yum install -y yum-utils device-mapper-persistent-data lvm2 $ sudo yum-config-manager --add-repo http://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo $ sudo…...
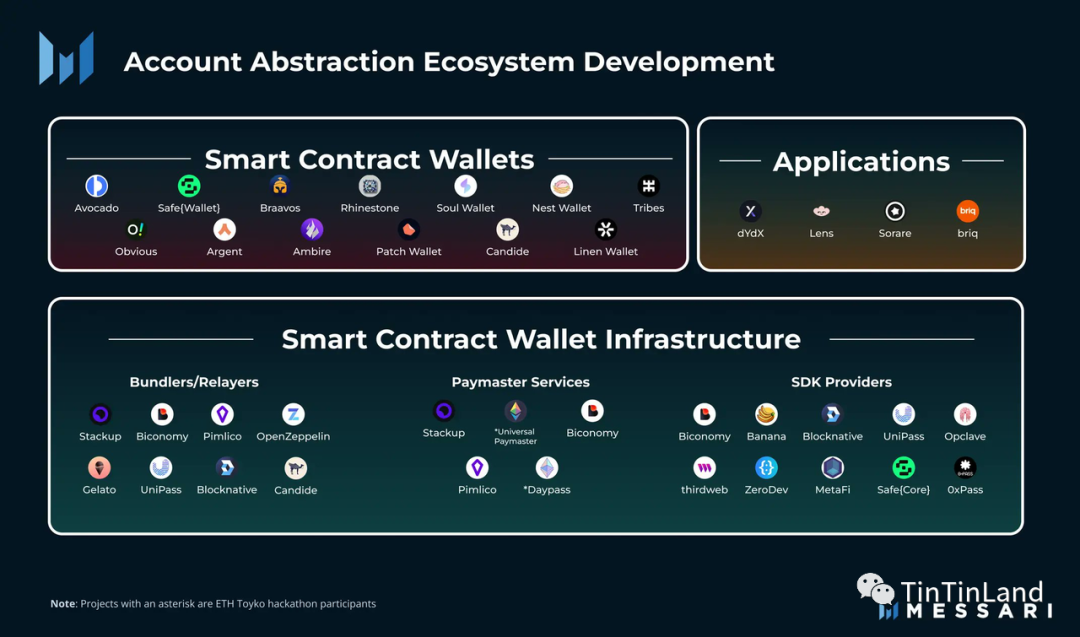
专访 BlockPI:共建账户抽象未来的新一代 RPC 基础设施
在传统 RPC 服务板块上,开发者一直饱受故障风险、运行环境混乱等难题的折磨。实现 RPC 服务的去中心化,且保持成本优势和可扩展性,始终是区块链基础设施建设的重要命题之一。从 2018 年观察中心化 RPC 供应商服务现状开始,BlockPI…...
js fetch请求中断的几种方式
1、通过AbortController 这是官方标准手段,真正意义的阻止请求(不支持ie) 后端接口设置的两秒返回数据 function myFetch() {const controller new AbortController();const signal controller.signal;fetch(http://localhost:3000/aaa/…...

Python自动化实战之使用Selenium进行Web自动化详解
概要 为了完成一项重复的任务,你需要在网站上进行大量的点击和操作,每次都要浪费大量的时间和精力。Python的Selenium库就可以自动化完成这些任务。 在本篇文章中,我们将会介绍如何使用Python的Selenium库进行Web自动化,以及如何…...

告别手改脚本!用CANoe Panel面板做个变量控制台,测试效率翻倍
告别手改脚本!用CANoe Panel面板打造智能变量控制台 在车载网络测试领域,效率提升往往隐藏在那些被忽视的日常操作细节中。当测试工程师频繁打开CAPL脚本修改超时阈值、调整诊断ID或切换测试模式时,不仅打断了工作流,更在团队协作…...

纯视觉纵深无感管控,落地硐室无人少人化透明值守模式技术白皮书
纯视觉纵深无感管控,落地硐室无人少人化透明值守模式技术白皮书副标题:摒弃井下繁杂传感布设,依靠暗光三维实景重构、深部空间无感感知、盲区跨镜无痕跟踪、身体指纹生物核验,实现井下 24 小时无人值守、全域透明运维前言矿山井下…...

终极罗技PUBG鼠标宏配置指南:5步告别压枪烦恼
终极罗技PUBG鼠标宏配置指南:5步告别压枪烦恼 【免费下载链接】logitech-pubg PUBG no recoil script for Logitech gaming mouse / 绝地求生 罗技 鼠标宏 项目地址: https://gitcode.com/gh_mirrors/lo/logitech-pubg 还在为《绝地求生》中疯狂上跳的枪口而…...

基于AutoHotkey的Windows桌面自动化工具开发实战
1. 项目概述与核心价值最近在整理个人项目库时,翻到了一个挺有意思的“老伙计”——cua_desktop_operator_skill。这个项目名听起来有点拗口,直译过来是“CUA桌面操作员技能”。乍一看,可能会让人联想到某种工业控制台的专用软件。但实际上&a…...

深入解析go-containerregistry:无守护进程的容器镜像操作利器
1. 项目概述:容器镜像的“瑞士军刀”如果你在容器化这条路上已经走了一段时间,那么对“镜像”这个概念一定不会陌生。无论是 Docker Hub 上的nginx:latest,还是你公司私有仓库里的myapp:v1.2.3,这些镜像都是容器世界的基石。但你是…...

基于双线性插值的AMG8833热成像分辨率提升方案与嵌入式实现
1. 项目概述:从8x8到15x15,一次软件驱动的热成像分辨率革命如果你玩过基于AMG8833这类低成本红外热成像传感器的项目,大概率会对它那8x8的“马赛克”图像印象深刻——64个像素点,勉强能看出个温度轮廓,但细节ÿ…...

CI/CD安全最佳实践:保护软件交付流程
CI/CD安全最佳实践:保护软件交付流程 一、CI/CD安全最佳实践概述 1.1 CI/CD安全最佳实践的定义 CI/CD安全最佳实践是指在持续集成和持续部署流程中实施的安全策略和措施。它涵盖代码提交、构建、测试、部署等各个阶段的安全防护。 1.2 CI/CD安全最佳实践的价值 安全…...

基于Claude API构建可编程AI智能体:从对话到自动化生产单元
1. 项目概述:从Claude中“招聘”一个AI伙伴最近在GitHub上看到一个挺有意思的项目,叫“hire-from-claude”。初看这个标题,你可能会有点摸不着头脑:Claude不是Anthropic公司开发的那个AI助手吗?怎么还能从它那里“招聘…...

基于HalloWing的交互式徽章:传感器融合与事件驱动编程实践
1. 项目概述:当硬件开发遇上节日创意如果你和我一样,是个喜欢在万圣节搞点“技术流”小把戏的硬件爱好者,那么手头有一块Adafruit的HalloWing开发板,绝对能让你的节日装备脱颖而出。这不仅仅是一个简单的微控制器项目,…...

Go语言轻量级规则引擎Airules:高性能架构与微服务实践
1. 项目概述:从“Airules”看现代规则引擎的轻量化实践最近在GitHub上看到一个挺有意思的项目,叫“Airules”。光看名字,你可能会联想到“AI规则”或者“空气规则”,其实它的全称是“Air Rules”,直译过来就是“空气规…...