木叶飞舞之【机器人ROS2】篇章_第一节、ROS2 humble及cartorgrapher安装
ROS2的humble安装
1、系统配置ubuntu 22.04
- 假如长期使用ros2,建议是ubuntu系统或者双系统下安装操作,不要在虚拟机中进行。
- ubuntu系统能用最新的大系统就用最新的,比如22.04。等明年24.04出来可以用24.04
2、humble安装
- ros版本选择humble版本,比较稳定,各公司用的多一点。
2.1、一键安装
- 利用鱼香ROS的安装指令一键安装即可
wget http://fishros.com/install -O fishros && . fishros
(1) 选择===> 一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
(2) 选择===> 更换系统源再继续安装
(3) 选择===> humble系统
(4) 选择===> humble系统桌面版
接着等待安装即可
ROS2的rosdepc安装
鱼香ros中可以安装另外版本的rosdepc
wget http://fishros.com/install -O fishros && . fishros
选择3,一键配置rosdepc。安装完成后运行rosdepc update
ROS2的cartographer安装
- Cartographer是Google开源的一个跨平台、实时定位与建图系统(SLAM)。它采用的激光传感器可以是2D或3D形式。
- cartographer的github地址
- cartographer_ros的github地址
- cartographer的参考文档地址
- cartographer_ros的参考文档地址
cartographer的安装方式有两种:apt安装和源码安装。推荐源码安装,便于查看和修改源码。
1、源码安装
- 创建工作空间
mkdir -p carto_ws/src && cd carto_ws/src
- 克隆代码
git clone https://ghproxy.com/https://github.com/ros2/cartographer.git -b ros2
git clone https://ghproxy.com/https://github.com/ros2/cartographer_ros.git -b ros2
- 安装依赖
cd ~/carto_ws
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y- 编译
colcon build --packages-up-to cartographer_ros- 验证是否成功
source install/setup.bash
ros2 pkg list | grep cartographer
显示内容如下
cartographer_ros
cartographer_ros_msgs
相关文章:

木叶飞舞之【机器人ROS2】篇章_第一节、ROS2 humble及cartorgrapher安装
ROS2的humble安装 1、系统配置ubuntu 22.04 假如长期使用ros2,建议是ubuntu系统或者双系统下安装操作,不要在虚拟机中进行。ubuntu系统能用最新的大系统就用最新的,比如22.04。等明年24.04出来可以用24.04 2、humble安装 ros版本选择humb…...
patch操作和分支操作整理)
Git版本管理(02)patch操作和分支操作整理
1 git patch操作 1.1 git diff比较 使用git diff用于显示当前工作区与暂存区或提交历史之间的差异,如果使用它生成patch,则需要使用git apply命令来引入patch 1.2 git patch打包 使用git format-patch生成patch # 打包最近的一个patch: $git format…...

前端需要理解的HTML知识
HTML(超文本标记语言,HyperText Markup Language)不是编程语言,而是定义了网页内容的含义和结构的标记语言。。“超文本”(hypertext)是指连接单个网站内或多个网站间的网页的链接。HTML 使用“标记”&…...

机器学习笔记 - 数据科学中基于 Scikit-Learn、Tensorflow、Pandas 和 Scipy的7种最常用的特征工程技术
一、概述 特征工程描述了制定相关特征的过程,这些特征尽可能准确地描述底层数据科学问题,并使算法能够理解和学习模式。换句话说:您提供的特征可作为将您自己对世界的理解和知识传达给模型的一种方式。 每个特征描述一种信息“片段”。这些部分的总和允许算法得出有关目标变…...

深眸科技创新赋能视觉应用产品,以AI+机器视觉解决行业应用难题
随着工业4.0时代的加速到来,我国工业领域对于机器视觉技术引导的工业自动化和智能化需求持续上涨,国内机器视觉行业进入快速发展黄金期,但需求广泛出现同时也对机器视觉产品的检测能力提出了更高的要求。 传统机器视觉由人工分析图像特征&am…...

2023年国赛 高教社杯数学建模思路 - 案例:异常检测
文章目录 赛题思路一、简介 -- 关于异常检测异常检测监督学习 二、异常检测算法2. 箱线图分析3. 基于距离/密度4. 基于划分思想 建模资料 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 一、简介 – 关于异常…...

【Electron】使用electron-builder打包时下载electron失败或慢的解决方案
问题描述 electron-builder打包时报错信息如下: Building app with electron-builder:• electron-builder version22.14.5 os10.0.19042• description is missed in the package.json appPackageFileE:\h-world\hscmweb-diagrams\dist_electron\bundled\packa…...
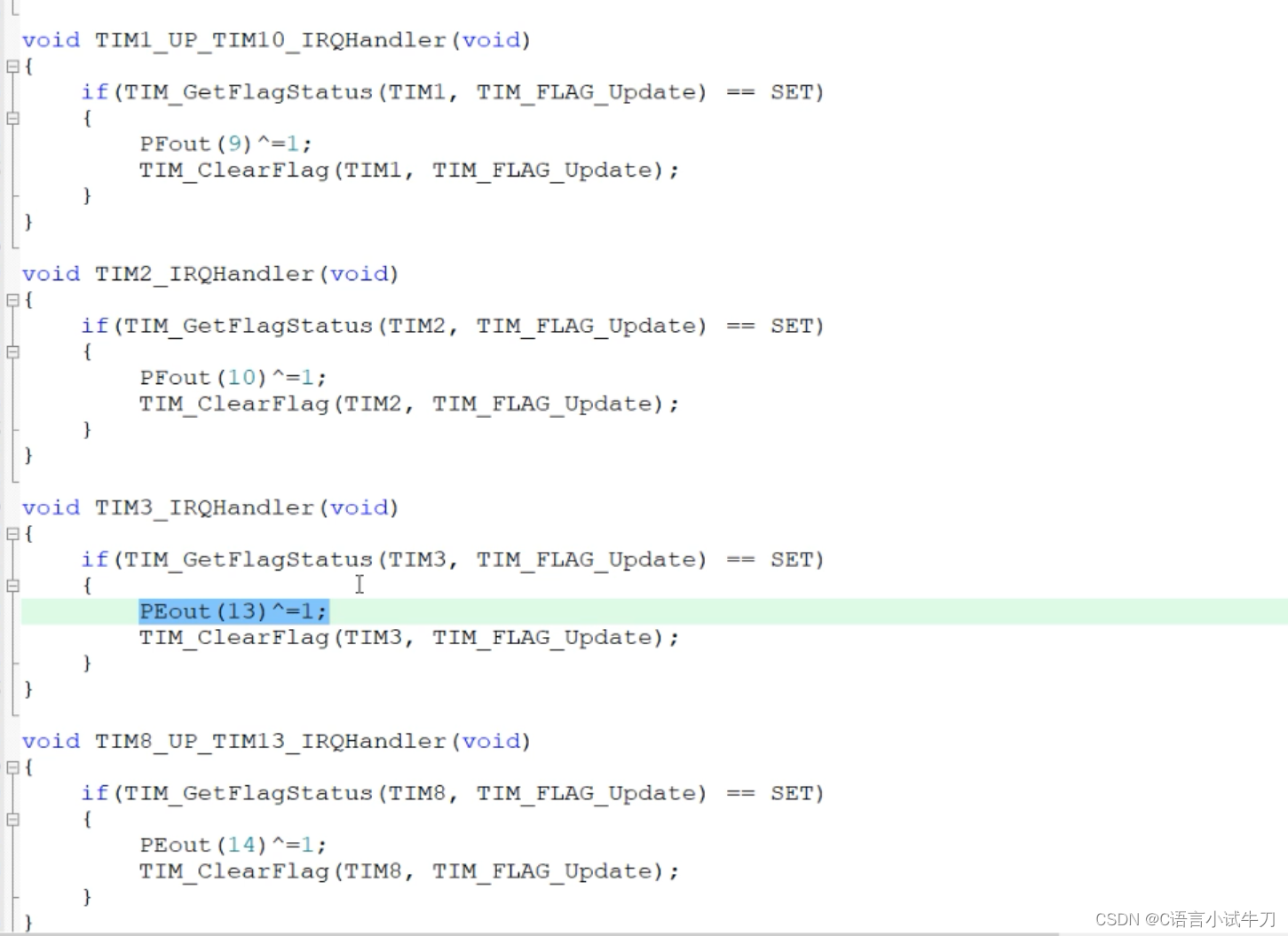
stm32之16.外设定时器——TIM3
----------- 源码 void tim3_init(void) {NVIC_InitTypeDef NVIC_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//使能TIM3的硬件时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//配置TIM3的定时时间TIM_TimeBaseStructure.TIM_Period 10000-1…...

vue3自定义指令防止表单重复提交
可以设置在某个事件段内不允许重复提交;或者点击提交后设置提交flag,flag为true则不能再次提交 <template><div><h1>防止表单重复提交</h1><button click"submitForm" v-throttle>提交</button></di…...

无涯教程-Perl - wait函数
描述 该函数等待子进程终止,返回已故进程的进程ID。进程的退出状态包含在$?中。 语法 以下是此函数的简单语法- wait返回值 如果没有子进程,则此函数返回-1,否则将显示已故进程的进程ID Perl 中的 wait函数 - 无涯教程网无涯教程网提供描述该函数等待子进程终止,返回已故…...
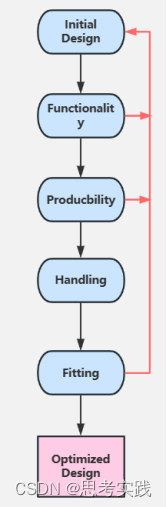
DFMA是一种设计思想与方法论
DFMA(Design for Manufacturing and Assembly)是指在产品设计阶段,充分考虑来自于产品制造和装配的要求,使得机械工程师设计的产品具有很好的可制造性和可装配性,从根本上避免在产品开发后期出现的制造和装配质量问题。…...
黑客自学路线
谈起黑客,可能各位都会想到:盗号,其实不尽然;黑客是一群喜爱研究技术的群体,在黑客圈中,一般分为三大圈:娱乐圈 技术圈 职业圈。 娱乐圈:主要是初中生和高中生较多,玩网恋…...

怎么维护自己的电脑
文章目录 我的电脑日常维护措施维护技巧键盘&屏幕清洁清理磁盘空间控制温度 电脑换电池 无论是学习还是工作,电脑都是IT人必不可少的重要武器,一台好电脑除了自身配置要经得起考验,后期主人对它的维护也是决定它寿命的重要因素࿰…...

ansible(2)-- ansible常用模块
部署ansible:ansible(1)-- 部署ansible连接被控端_luo_guibin的博客-CSDN博客 目录 一、ansible常用模块 1.1 ping 1.2 command 1.3 raw 1.4 shell 1.5 script 1.6 copy 1.7 template 1.8 yum 11.0.1.13 主控端(ansible)11.0.1.12 被控端(k8s…...
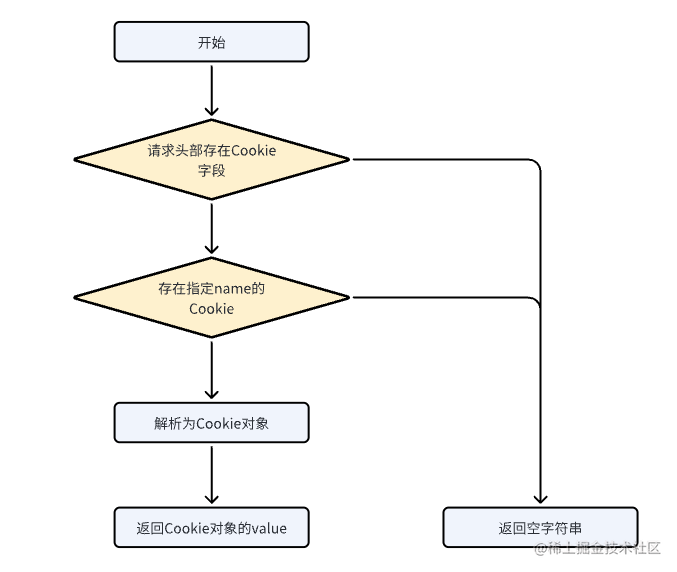
一文了解Gin对Cookie的支持z
1. 引言 本文将从Web应用程序处理请求时需要用户信息,同时HTTP又是无状态协议这个矛盾点出发。从该问题出发,简单描述了解决该问题的Token 机制,进而引出Cookie的实现方案。 基于此我们将详细描述Cookie的规范,然后详细描述具体…...

android外卖点餐界面(期末作业)
效果展示: AndroidMainFest.xml <?xml version"1.0" encoding"utf-8"?> <manifest xmlns:android"http://schemas.android.com/apk/res/android"xmlns:tools"http://schemas.android.com/tools"><a…...
ArcGIS API开发介绍
本来想自己总结写一下的,但是发现有个网站总结的特别好。所以直接给大家分享一下地址: 起步 - Start | ArcGis中文网 当然系统性的学习和使用还的看官网文档Quick Links | API Reference | ArcGIS Maps SDK for JavaScript 4.27 | ArcGIS Developers …...

大数据课程K5——Spark的框架核心概念
文章作者邮箱:yugongshiye@sina.cn 地址:广东惠州 ▲ 本章节目的 ⚪ 了解Spark的框架核心概念; ⚪ 掌握Spark的Spark集群模式安装; ⚪ 掌握Spark的Spark架构; ⚪ 掌握Spark的Spark调度模块; 一、Spark框架核心概念 1. RDD。弹性分布式数据集,是Spark最…...

【⑬MySQL | 数据类型(一)】简介 | 整数 | 浮点 | 定点类型
前言 ✨欢迎来到小K的MySQL专栏,本节将为大家带来MySQL数据类型简介 | 整数 | 浮点 | 定点类型的分享✨ 目录 前言0.数据类型简介1 整数类型2 浮点类型3 定点类型4 日期/时间类型总结 0.数据类型简介 数据类型(data_type)是指系统中所允许的…...

5.6 汇编语言:汇编高效数组寻址
数组和指针都是用来处理内存地址的操作,二者在C语言中可以互换使用。数组是相同数据类型的一组集合,这些数据在内存中是连续存储的,在C语言中可以定义一维、二维、甚至多维数组。多维数组在内存中也是连续存储的,只是数据的组织方…...
完整移植方案)
正点原子 RK3562 Android14 集成 GStreamer 1.24.13(CLI + V4L2 插件)完整移植方案
RK3562 Android 系统中集成 GStreamer CLI V4L2 插件的完整移植方案,重点难点在于:预编译产物整理、Android.bp 自动生成、vendor 路径安装、运行时环境变量注入,以及 Android 动态链接 namespace 限制的排查。 正点原子RK3562J开发板瑞芯微…...

Guitar Pro 8.1.5作为吉他爱好者的练琴神器,其跨平台支持与强大功能值得重点关注。本评测聚焦其核心优势与操作要点,为吉他学习者与原创音乐人提供高效解决方案。跨系统兼容性Guit
Guitar Pro 8.1.5作为吉他爱好者的练琴神器,其跨平台支持与强大功能值得重点关注。本评测聚焦其核心优势与操作要点,为吉他学习者与原创音乐人提供高效解决方案。跨系统兼容性 Guitar Pro 8.1.5同时支持macOS与Windows系统,mac用户无需转战Wi…...

国家级数据仓库构建:从爬取到应用的全流程实践指南
1. 项目概述与核心价值最近在整理一个数据项目时,我偶然发现了一个名为“national_data”的仓库,作者是Ddhjx。这个项目名听起来平平无奇,但点进去之后,我发现它远不止是一个简单的数据集合。它本质上是一个结构化的、持续更新的国…...
)
保姆级教程:手把手教你用Keil 5为APM32F030C6搭建第一个工程(附固件库下载与常见编译错误解决)
从零到一:APM32F030C6在Keil 5上的工程搭建实战指南 第一次接触极海APM32系列芯片的开发者,往往会被陌生的开发环境和复杂的固件库结构弄得手足无措。不同于常见的STM32生态,APM32虽然硬件兼容但软件配置上存在不少差异点。本文将带你用Keil …...

NodeMCU PyFlasher:ESP8266图形化固件烧录终极解决方案
NodeMCU PyFlasher:ESP8266图形化固件烧录终极解决方案 【免费下载链接】nodemcu-pyflasher Self-contained NodeMCU flasher with GUI based on esptool.py and wxPython. 项目地址: https://gitcode.com/gh_mirrors/no/nodemcu-pyflasher 对于ESP8266开发者…...

观测多模型API调用延迟与稳定性选择合适服务商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观测多模型API调用延迟与稳定性选择合适服务商 在实际项目开发中,直接依赖单一模型服务商可能会面临服务波动或响应延迟…...

如何在浏览器中重新解锁微信网页版?一款开源插件为你提供完美解决方案
如何在浏览器中重新解锁微信网页版?一款开源插件为你提供完美解决方案 【免费下载链接】wechat-need-web 让微信网页版可用 / Allow the use of WeChat via webpage access 项目地址: https://gitcode.com/gh_mirrors/we/wechat-need-web 还在为微信网页版无…...

Go语言AI Agent框架goclaw:模块化架构与技能系统实战
1. 项目概述:一个用Go语言构建的现代化AI Agent框架如果你正在寻找一个功能全面、架构清晰,并且能让你快速上手构建智能助理的Go语言框架,那么goclaw(狗爪)绝对值得你花时间研究。我最近在评估几个开源的AI Agent框架&…...

解决Claude Code频繁封号与Token不足的替代接入方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code频繁封号与Token不足的替代接入方案 1. 场景与核心思路 对于依赖Claude Code进行编程辅助的开发者而言࿰…...

不加机器也能提速10倍?低成本优化系统性能,才是高手真正的实力
不加机器也能提速10倍?低成本优化系统性能,才是高手真正的实力 很多公司一遇到系统卡顿。 第一反应特别统一: 加机器。CPU 不够? 加。 QPS 扛不住? 扩容。 数据库慢? 上集群。 结果最后: 服务器越来越多。 成本越来越高。 系统还是越来越慢。 最离谱的是: 有…...