vscode+ros开发环境搭建
目录
介绍
前提
vscode安装
vscode插件安装
工作空间准备
打开vscode
创建catkin包
编写cpp代码
编译
运行
启动ros服务
监听话题
启动ros测试
介绍
ros开发是机器人开发中必不可少的工作,语言选择可以是c++,也可以是python。工具的话,不能像windows系统那样丰富多彩,qtcreate,visual studio,clion。因为ros环境绝大部分是在ubuntu系统之下的,所以这里就限制了只能在linux环境下使用IDE,这里就选择vscode。
前提
本文不是从无到有,从安装ros环境到搭建vscode工具,然后编写代码,编译调试,这里的前提是我们系统安装了ros-melodic-desktop-full,可以运行ros相关命令。
vscode安装
首先安装vscode,推荐使用官方地址下载,然后手动切换到国内加速器。
点击下载之后,因为官方地址下载很慢,这里直接在浏览器下载里找到下载项,拷贝下载链接,然后粘贴到浏览器地址栏,修改为国内地址。
比如:
https://az764295.vo.msecnd.net/stable/6c3e3dba23e8fadc360aed75ce363ba185c49794/code_1.81.1-1691620686_amd64.deb
https://vscode.cdn.azure.cn/stable/6c3e3dba23e8fadc360aed75ce363ba185c49794/code_1.81.1-1691620686_amd64.deb
下载的deb安装文件直接通过dpkg -i xxx.deb安装即可。
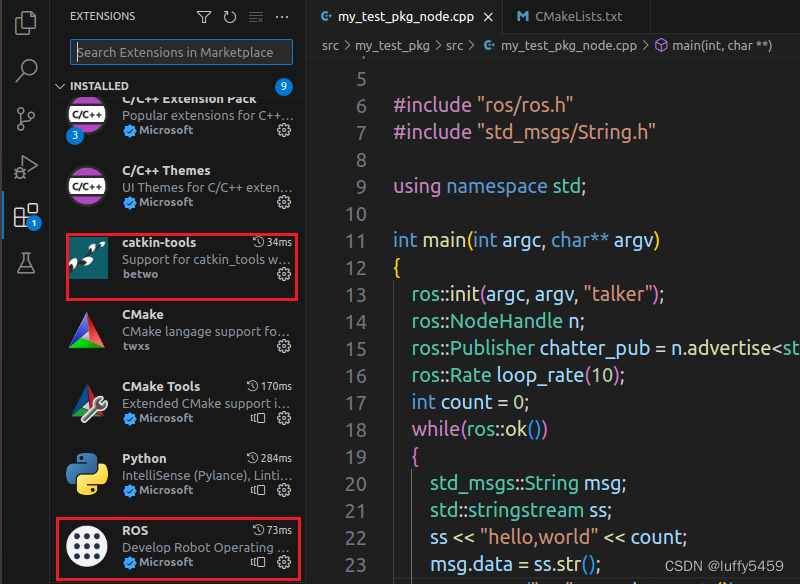
vscode插件安装
我们在插件扩展Extensions这里需要安装ros,catkin-tools两个插件。
工作空间准备
mkdir -p roshelloworld/src
cd roshelloworld/src
catkin_init_workspace
cd ..
catkin_make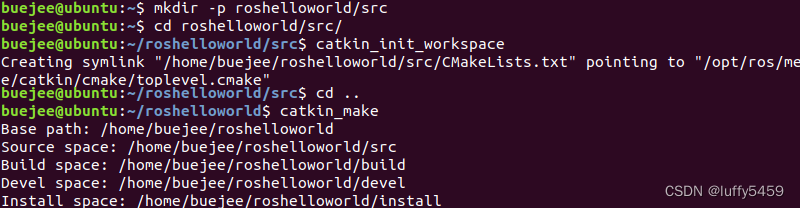
注意,这里如果catkin_init_workspace命令提示没有的话,就是环境的问题,其实ros安装的时候已经有了,我们需要把它设置上,运行:
echo "source /opt/ros/melodic/setup.bash" >> /etc/profile 打开vscode
code .在当前编译过的工作空间下,通过命令行打开vscode
创建catkin包
右键src->Create Catkin Package

后续操作中,需要输入包名,依赖名,这里包名是my_test_pkg,依赖就是 roscpp,rospy,std_msgs。
之后包结构变为如下所示:
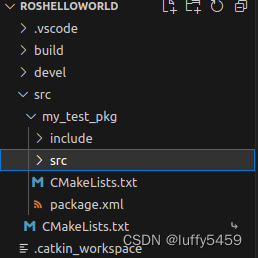
原本的roshelloworld/src下面多了my_test_pkg,然后my_test_pkg也有src,CMakeLists.txt文件。这里的CMakeLists.txt和roshelloworld下的CMakeLists.txt作用不同,后面我们会修改my_test_pkg包下的这个CMakeLists.txt文件。
编写cpp代码
我们在my_test_pkg/src目录下新建 my_test_pkg_node.cpp,添加代码如下:
#include <iostream>
#include <string>
#include <sstream>#include "ros/ros.h"
#include "std_msgs/String.h"using namespace std;int main(int argc, char** argv)
{ros::init(argc, argv, "talker");ros::NodeHandle n;ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);ros::Rate loop_rate(10);int count = 0;while(ros::ok()) {std_msgs::String msg;std::stringstream ss;ss << "hello,world" << count;msg.data = ss.str();ROS_INFO("%s", msg.data.c_str());chatter_pub.publish(msg);ros::spinOnce();loop_rate.sleep();count++;}return 0;
}这段代码发布了/chatter话题,并且间隔10ms发送一次hello,world + count,后面测试的话,可以订阅/chatter话题,看收到的消息。
修改CMakeLists.txt:
include_directories(include${catkin_INCLUDE_DIRS}
)add_executable(${PROJECT_NAME}_node src/my_test_pkg_node.cpp)target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES}
)这些配置CMakeLists.txt都有,只需要打开对应注释即可。
编译
命令行下运行 catkin_make
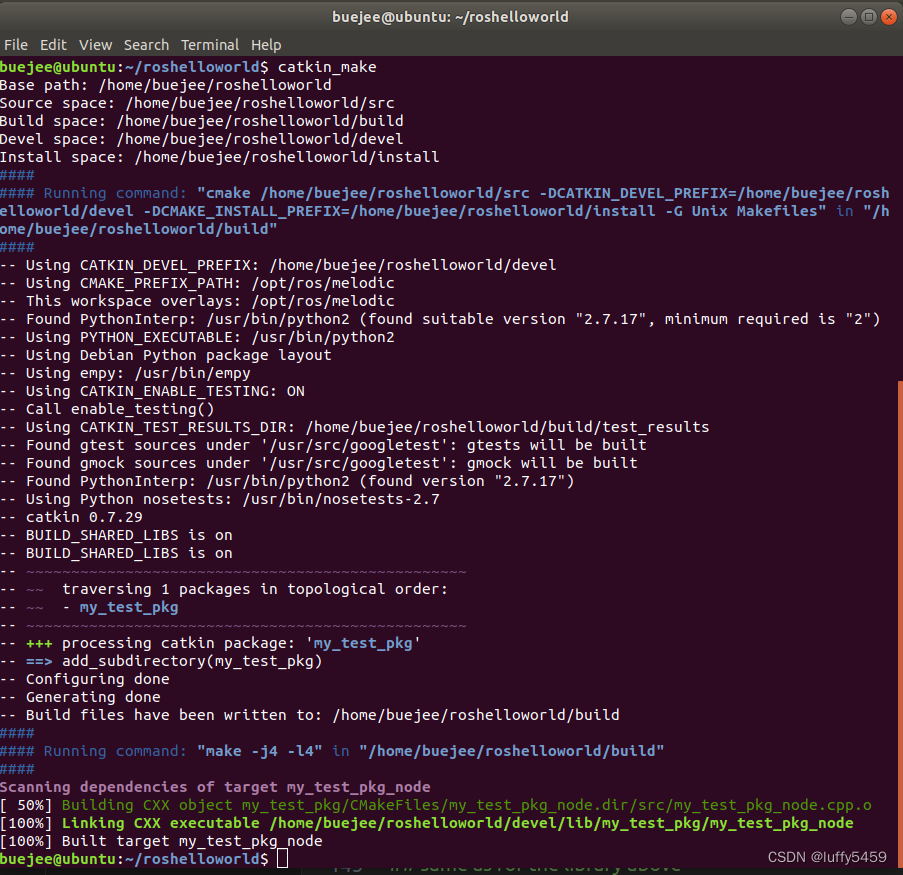
运行
启动ros服务
roscore监听话题
rostopic echo /chatter启动ros测试
rosrun my_test_pkg my_test_pkg_node
vscode+ros开发环境就介绍到这里了,我没有对代码进行调试,直接复制的别人代码。
相关文章:
vscode+ros开发环境搭建
目录 介绍 前提 vscode安装 vscode插件安装 工作空间准备 打开vscode 创建catkin包 编写cpp代码 编译 运行 启动ros服务 监听话题 启动ros测试 介绍 ros开发是机器人开发中必不可少的工作,语言选择可以是c,也可以是python。工具的话,不能像wi…...
10个最好的云GPU服务
随着深度学习、人工智能和机器学习等新技术的出现,云 GPU 的需求量很大。 GPU(图形处理单元)是专用处理器,用于处理计算机图形和游戏等活动所需的大量数据集和复杂计算。不过,它们现在对人工智能(A.I.&…...
使用Nodejs搭建简单的HTTP服务器 - 内网穿透公网远程访问
文章目录 前言1.安装Node.js环境2.创建node.js服务3. 访问node.js 服务4.内网穿透4.1 安装配置cpolar内网穿透4.2 创建隧道映射本地端口 5.固定公网地址🍀小结🍀 🎉博客主页:小智_x0___0x_ 🎉欢迎关注:&…...

Windows下搭建Tomcat HTTP服务,发布外网远程访问
文章目录 前言1.本地Tomcat网页搭建1.1 Tomcat安装1.2 配置环境变量1.3 环境配置1.4 Tomcat运行测试1.5 Cpolar安装和注册 2.本地网页发布2.1.Cpolar云端设置2.2 Cpolar本地设置 3.公网访问测试4.结语 前言 Tomcat作为一个轻量级的服务器,不仅名字很有趣࿰…...

【Spring Boot】详解条件注解以及条件拓展注解@Conditional与@ConditionalOnXxx
Spring Conditional Spring 4.0提供的注解。作用是给需要装载的Bean增加一个条件判断。只有满足条件才会装在到IoC容器中。而这个条件可以由自己去完成的,可以通过重写Condition接口重写matches()方法去实现自定义的逻辑。所以说这个注解增加了对Bean装载的灵活性。…...

Android 12 源码分析 —— 应用层 一(SystemUI准备篇)
Android 12 源码分析 —— 应用层一(SystemUI准备篇) 在接下来的时间中,将会使用Pixel 3(blueline)作为研究对象,选用AOSP的android-12.0.0_r34分支作源代码。 先从android的应用层进行探析,然后慢慢深入android的fr…...

记录 MySQL 如何开启已有的定时任务
1.首先,确保你已经在MySQL的配置文件my.ini中启用了事件调度器。在[mysqld]部分添加event_schedulerON,然后保存文件并重启MySQL服务。这将启用MySQL的事件调度器功能。 但如果是线上业务不能停也可以在该数据库中输入 -- 开启事件计划程序 SET GLOBAL …...

三种生成树(STP,RSTP,MSTP)的基本配置(自我理解)
目录 一、为什么要使用生成树(STP): 二、由于设备冗余而导致的问题: 广播风暴: 三、802.1D生成树基本配置 四、802.1D生成树实验 实验拓扑: 实验配置: 配置完成后,在SW8上观察现象&…...
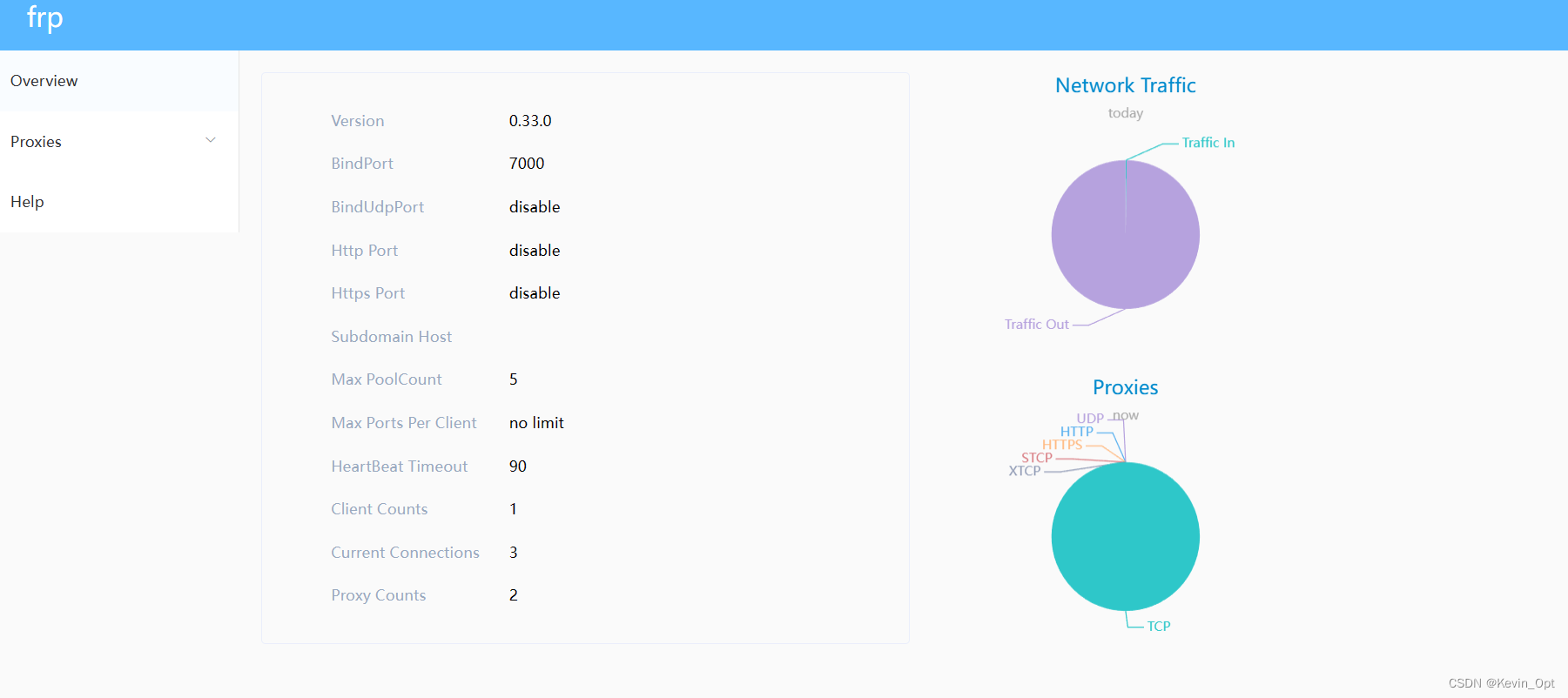
FRP内网穿透,配置本地电脑作为服务器
FRP内网穿透,配置本地电脑作为服务器 下载FRP服务端客户端 参考链接: https://www.it235.com/实用工具/内网穿透/pierce.html https://www.cnblogs.com/007sx/p/17469301.html 由于没有公网ip,所以尝试内网穿透将本地电脑作为服务器ÿ…...
Linux基础指令
本文已收录至《Linux知识与编程》专栏! 作者:ARMCSKGT 演示环境:CentOS 7 目录 前言 正文 查看当前用户whoami 查看当前目录路径pwd 清理屏幕clear 查看目录下文件指令ls 进入目录指令cd 以树状结构显示目录文件tree 创建普通文件指…...

基于GRU门控循环网络的时间序列预测matlab仿真,对比LSTM网络
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 LSTM: GRU 2.算法运行软件版本 matlab2022a 3.部分核心程序 %构建GRU网络模型 layers [ ...sequenceInputLayer(N_feature)gruLayer(N_hidden)f…...
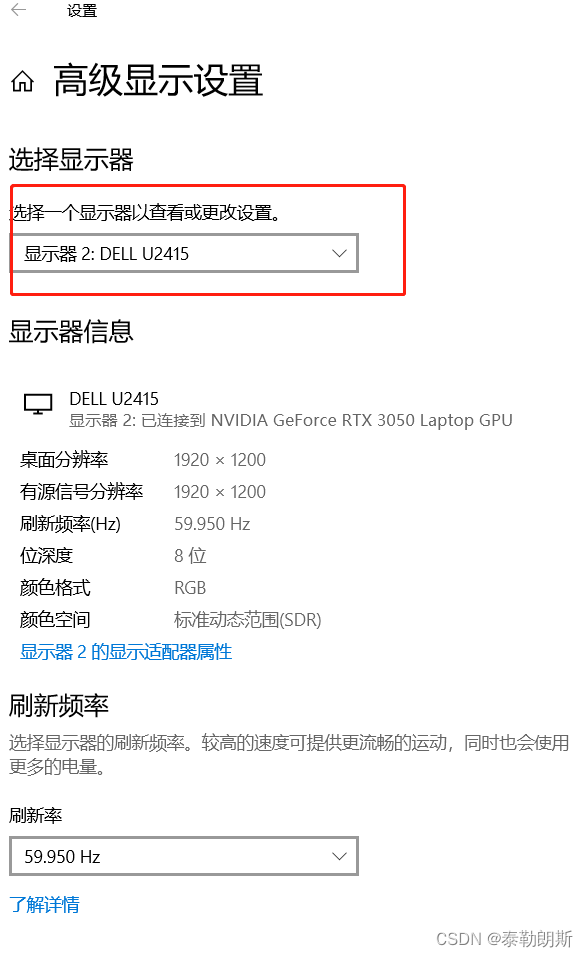
windows上ffmpeg如何录制双屏幕中的一个屏幕上的视频
首先,如何在window上安装ffmpeg自己查找scoop安装ffmpeg. 如题: 如果你有两个屏幕,如何让ffmpeg来录制其中的一个屏幕的视频呢。 很简单,首先你要查看另外一个屏幕的分辨率: 第一步:进入系统中 第二步&am…...
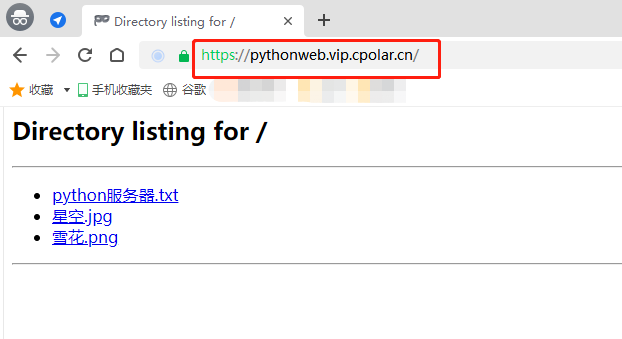
使用Python搭建服务器公网展示本地电脑文件
文章目录 1.前言2.本地http服务器搭建2.1.Python的安装和设置2.2.Python服务器设置和测试 3.cpolar的安装和注册3.1 Cpolar云端设置3.2 Cpolar本地设置 4.公网访问测试5.结语 1.前言 Python作为热度比较高的编程语言,其语法简单且语句清晰,而且python有…...
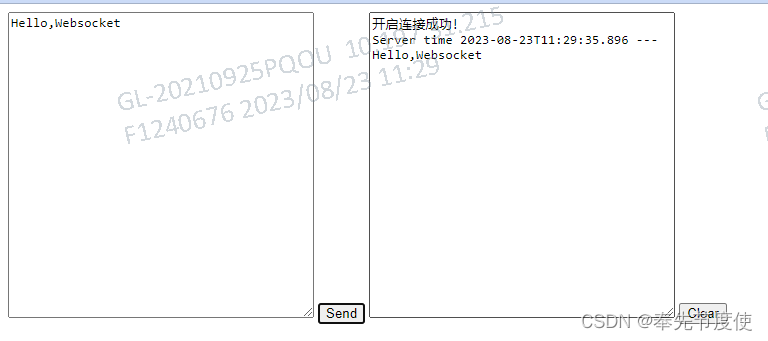
Java IO流(五)Netty实战[TCP|Http|心跳检测|Websocket]
Netty入门代码示例(基于TCP服务) Server端 package com.bierce.io.netty.simple; import io.netty.bootstrap.ServerBootstrap; import io.netty.buffer.ByteBuf; import io.netty.buffer.Unpooled; import io.netty.channel.*; import io.netty.channel.nio.NioEventLoopGro…...

C#基础进阶
C#基础进阶 泛型 http://www.runoob.com/csharp/csharp-generic.html 匿名函数 http://www.runoob.com/csharp/csharp-anonymous-methods.html 扩展方法 https://blog.csdn.net/u011127019/article/details/54728886 https://docs.microsoft.com/zh-cn/dotnet/csharp/pr…...

Java:ArrayList集合、LinkedList(链表)集合的底层原理及应用场景
ArrayList集合的底层原理及应用场景 LinkedList(链表)集合的底层原理及应用场景 单向链表 增加数据 删除数据 双向链表 LinkedList的应用场景之一:可以用来设计队列 入队 出队 LinkedList的应用场景之一:可以用来设计栈 压栈(push),addFirst…...

【Python】json文件的读取
文章目录 1. json简介2.json的使用规范3.json文件的书写4.json文件的读取 1. json简介 JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,常用于将结构化数据进行传输和存储。它基于JavaScript语法,但可以被多种编程…...
专用杂凑函数的消息鉴别码算法学习记录
声明 本文是学习github5.com 网站的报告而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们 范围 GB/T 15852的本部分规定了三种采用专用杂凑函数的消息鉴别码算法。这些消息鉴别码算法可用作数据完整性检验,检验数据是否被非授权地改变。同样…...

Golang使用消息队列(RabbitMQ)
最近在使用Golang做了一个网盘项目(类似百度网盘),这个网盘项目有一个功能描述如下:用户会删除一个文件到垃圾回收站,回收站的文件有一个时间期限,比如24h,24h后数据库中记录和oss中文件会被删除…...
Apache Spark远程代码执行漏洞(CVE-2023-32007)漏洞复现
漏洞描述 Apache Spark是美国阿帕奇(Apache)基金会的一款支持非循环数据流和内存计算的大规模数据处理引擎。 Apache Spark 3.4.0之前版本存在命令注入漏洞,该漏洞源于如果ACL启用后,HttpSecurityFilter中的代码路径可以允许通过…...

毕业设计 深度学习多目标跟踪 实时检测
文章目录 0 前言2 目标跟踪效果3 目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 0 前言 🔥 今天学长向大家分享一个毕业设计项目 为了大家能够顺利以及最少的精力通过毕设&…...

别再死记硬背了!用这 5 个核心功能理解 Final Cut Pro 的设计哲学
Final Cut Pro 的设计哲学:5个核心功能如何重塑你的剪辑思维 当你第一次打开Final Cut Pro(简称FCPX),可能会被它与其他剪辑软件截然不同的界面所困惑。这不是一个需要你适应传统时间线的工具,而是一个重新思考剪辑流程…...

LATENCY和INITIATION_INTERVAL同时约束时HLS决策
一、关于Latency和II同时约束 1.对同一个设计的II和latency同时约束,这两者在很多情况下是存在冲突的。 2.对同一个函数或者循环,使用HLS调度器来优化,HLS调度器内置设置了一些优先级的规则, 这种规则大多情况和设计者的直觉不一样…...

SpringBoot开发秘籍【个人八股】
介绍一下 SpringBoot? Spring Boot极大地简化了 Spring 应用的开发和部署过程。 以前我们用 Spring 开发项目的时候,需要配置一大堆 XML 文件,包括 Bean 的定义、数据源配置、事务配置等等,非常繁琐。而且还要手动管理各种 jar 包…...

JiYuTrainer高效实用指南:3步解锁极域电子教室控制,恢复电脑操作自由
JiYuTrainer高效实用指南:3步解锁极域电子教室控制,恢复电脑操作自由 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer 还在为课堂上被老师全屏控制电脑而烦…...
)
从Qt Creator到你的软件:如何用QDockWidget打造专业级可停靠面板(实战避坑)
从Qt Creator到你的软件:如何用QDockWidget打造专业级可停靠面板(实战避坑) 在开发桌面应用程序时,一个直观、灵活的用户界面往往能极大提升用户体验。许多专业级IDE如Qt Creator和VS Code都采用了可停靠面板的设计,允…...

基于Next.js与Shadcn/ui的现代Web仪表盘开发实战指南
1. 项目概述与核心价值 最近在折腾一个开源项目,叫 openclaw-dashboard ,是 anis-marrouchi 大佬在 GitHub 上开源的一个仪表盘项目。光看名字,你可能会觉得这又是一个平平无奇的“又一个仪表盘”,但实际深入把玩之后&#x…...

从硬件电路深入理解计算机中断机制:8088到现代中断控制器
1. 项目概述:从硬件视角重新认识中断在计算机的世界里,中断(Interrupt)是一个既基础又至关重要的概念。它就像是程序世界里的“紧急呼叫”系统,允许CPU这个“大管家”在埋头处理日常事务(执行主程序&#x…...

2026年降AI工具维普检测专项实测:五款主流工具维普AIGC检测通过率完整横评
2026年降AI工具维普检测专项实测:五款主流工具维普AIGC检测通过率完整横评 拿同一篇论文,用三款工具分别处理,记录了完整检测数据。 结论先说:嘎嘎降AI(www.aigcleaner.com)效果最稳,价格也最…...

中小团队如何通过Taotoken实现AI模型调用成本的可观测与可优化
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 中小团队如何通过Taotoken实现AI模型调用成本的可观测与可优化 对于中小型研发团队而言,引入大模型能力已成为提升产品…...