(6)(6.3) 自动任务中的相机控制
文章目录
前言
6.3.1 概述
6.3.2 自动任务类型
6.3.3 创建合成图像
前言
本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal have already been connected and configured)。
6.3.1 概述
规划摄像任务与规划其他任何带有航点和事件(planning any other mission with waypoints and events)的任务几乎完全相同。唯一不同的是,在摄像任务中,你可以指定在航点或飞行器移动过程中的固定时间间隔触发相机快门的命令。如果摄像机安装在云台上,你还可以设置云台方向,或让它跟踪某个特定的兴趣点。
对于简单的任务,你可以手动指定所需的航点和相机指令。对于更复杂的路径和网格勘测,Mission Planner 提供的工具可为任意区域自动生成所需的任务,从而简化了操作。
相机命令
- DO_SET_CAM_TRIGG_DIST — 定时触发相机快门。这最常用于辅助区域勘测;
- DO_DIGICAM_CONTROL — 每次调用此命令时触发一次相机快门;
- DO_AUX_FUNCTION —它允许在任务中执行任何辅助功能(auxiliary function),而无需设置辅助开关。这包括摄像机开始录制、摄像机变焦、摄像机手动对焦和摄像机自动对焦。
相机云台命令
如果使用的是相机云台,则可以设置相机位置(偏航、倾斜、横滚)或将其对准特定的感兴趣区域(ROI):
- DO_SET_ROI — 将摄像机瞄准指定的感兴趣区域(位置,包括高度);
- DO_GIMBAL_MANAGER_PITCHYAW — 将云台移动到所需的俯仰角和偏航角(单位:度)。正俯仰角为向上,负俯仰角为向下。正偏航角为顺时针,负偏航角为逆时针。如果"Flags"字段为"0",则偏航角度为"机身框架"角度(例如 0 表示向前)。如果"Flags"字段为"16",则偏航角为"地球框架"(例如 0 为正北);
- DO_MOUNT_CONTROL — 以指定的横滚、俯仰和偏航定位云台。
伺服和继电器命令
舵机和继电器输出可连接到硬件,并在执行任务时分别使用 DO_SET_SERVO 或 DO_SET_RELAY 命令激活。
这些输出的一个可能用途是控制快门以外的相机功能(例如,设置变焦级别或将拍摄从静态切换到视频)。
!Note
将舵机或继电器连接到摄像机的方法以及可访问的功能取决于摄像机及其支持的遥控装置(请参阅摄像机和云台 wiki 页面的摄像机控制和地理标记部分)(Camera Control and GeoTagging section of the Cameras and Gimbals wiki page)。
6.3.2 自动任务类型
Mission Planner 支持以下自动航点选项。要访问这些选项,请打开"飞行计划"屏幕,右键单击地图,然后从"自动航点"菜单下选择选项:
- Create WP Circle — 创建一个航点圈;
- Area — 显示当前多边形的面积(如果已定义);
- Create Spline Circle — 一个圆圈,其中航点的高度遵循一条上升斜线(与飞行器有关);
- Survey (Grid) — 自动创建航点和相机控制指令,勘测指定的多边形;
- Survey (Gridv2) — 正在建设中!这是一个更简单的网格控件,用于创建矩形测量区域;
- SimpleGrid — 一个简单的自动创建的测量网格。未定义相机控制,因此必须单独添加。
以下部分包括社区提供的自动勘测任务示例。
Survey (Grid) Example
Mission Planner 的勘测(网格)选项可自动定义覆盖任意多边形所需的航点,并在相关航点上设置 DO_SET_CAM_TRIGG_DIST,以确保在飞行器路径上以固定间隔捕获图片。
- 打开"飞行计划"选项卡;
- 右键点击地图,选择绘制多边形 | 添加多边形点。在要拍摄的区域周围创建点;
- 右键点击地图,选择自动 WP | 勘测(网格):
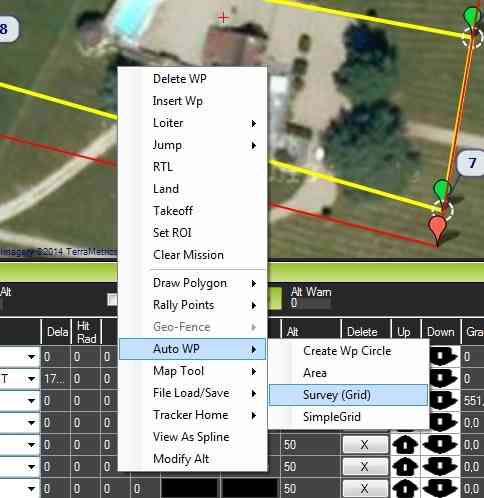
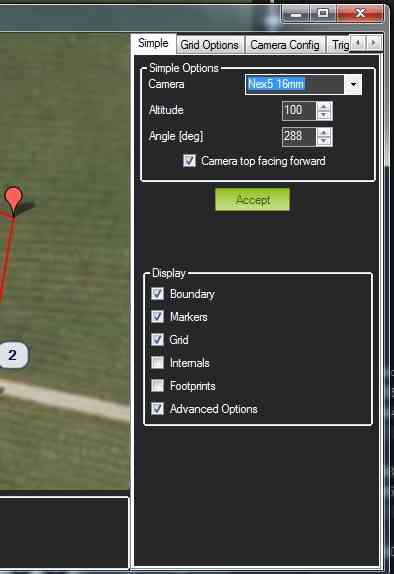
- 然后,Mission Planner 将显示一个配置屏幕,你可以在此定义摄像机的品牌/型号和其他参数,包括你想要的图片重叠度、镜头尺寸等。DO_SET_CAM_TRIGG_DIST 会根据这些信息自动计算!
点击"接受"后,Mission Planner 将生成一份航点列表,其中包括指定区域内的起飞和着陆航点。调用 DO_SET_CAM_TRIGG_DIST 命令可设置任务期间两次相机触发之间的距离(以米为单位)。任务结束时,DO_SET_CAM_TRIGG_DIST 会被再次调用,将参数设置回零(停止捕捉图像)。
带有航点和摄像机触发器的最终任务看起来是这样的:

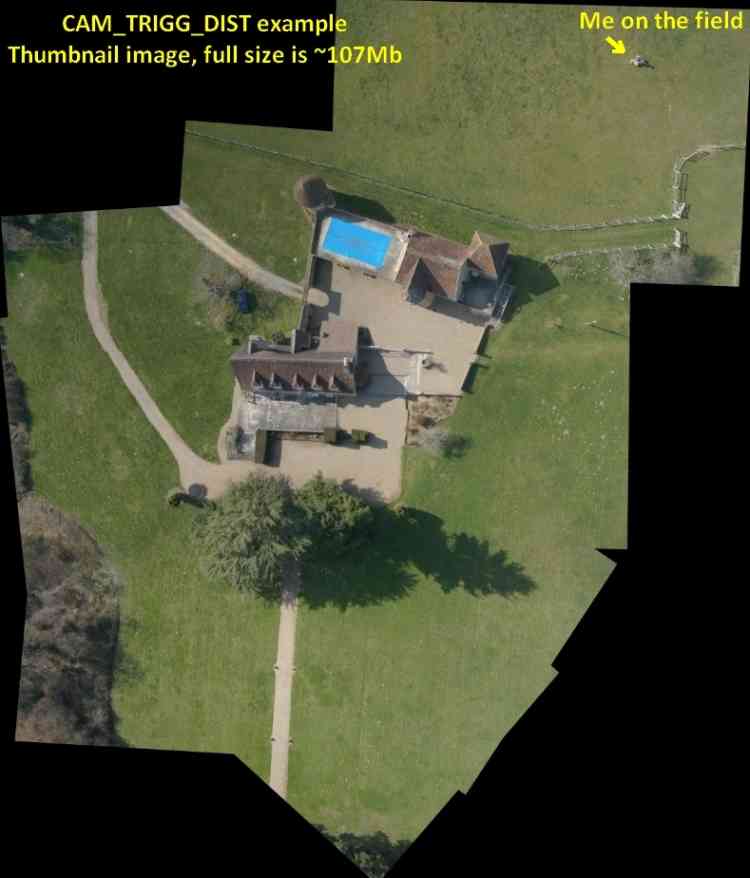
运行了上图所示的测试任务。它生成了 15 幅图像,并将其拼接在一起。下面是合成图像的缩略图(因为全尺寸图像太大,约 107MB)。
6.3.3 创建合成图像
有许多制作合成图像的免费和付费工具:
- Pix4Dmapper — 免费的"探索"版本支持图像合并;
- Microsoft 图像合成编辑器(ICE)(Microsoft Image Composite Editor (ICE))。
相关文章:
(6)(6.3) 自动任务中的相机控制
文章目录 前言 6.3.1 概述 6.3.2 自动任务类型 6.3.3 创建合成图像 前言 本文介绍 ArduPilot 的相机和云台命令,并说明如何在 Mission Planner 中使用这些命令来定义相机勘测任务。这些说明假定已经连接并配置了相机触发器和云台(camera trigger and gimbal ha…...

什么是cssreset ?为什么要用到cssreset?
1,什么是cssreset ? 顾名思义,css reset,样式重置。即重新设置界面的样式。 CSS reset,又叫做 CSS 重写或者 CSS 重置,用于改写HTML标签的默认样式。 有些HTML标签在浏览器里有默认的样式,例如 p 标签有上…...

SpringCloud学习笔记(四)_ZooKeeper注册中心
基于Spring Cloud实现服务的发布与调用。而在18年7月份,Eureka2.0宣布停更了,将不再进行开发,所以对于公司技术选型来说,可能会换用其他方案做注册中心。本章学习便是使用ZooKeeper作为注册中心。 本章使用的zookeeper版本是 3.6…...
【算法专题突破】双指针 - 移动零(1)
目录 写在前面 1. 题目解析 2. 算法原理 3. 代码编写 写在最后: 写在前面 在进行了剑指Offer和LeetCode hot100的毒打之后, 我决心系统地学习一些经典算法,增强我的综合算法能力。 1. 题目解析 题目链接:283. 移动零 - 力…...
Nginx高可用集群
目录 一.简介二.案例1.实现思路2.配置文件修改3.实现效果故障转移机制 一.简介 以提高应用系统的可靠性,尽可能地减少中断时间为目标,确保服务的连续性,达到高可用的容错效果。例如“故障切换”、“双机热备”、“多机热备”等都属于高可用集…...

Rust 基础入门 ——所有权 引言 :垃圾自动回收机制的缺陷。
在以往,内存安全几乎都是通过 GC 的方式实现,但是 GC 会引来性能、内存占用以及 Stop the world 等问题,在高性能场景和系统编程上是不可接受的, 我们先介绍一下这些概念都是什么: 内存安全是指程序在运行过程中不会访…...

Ubuntu20.04安装软件报错:The following packages have unmet dependencies
Ubuntu20.04更换阿里云源后安装软件都会报错:The following packages have unmet dependencies 查看资料,大概是ubuntu本身的源比较版本较老,而阿里云的源比较新,因此版本不匹配造成依赖的库不匹配,所以只要将阿里云的…...
:享元模式)
Java 与设计模式(12):享元模式
一、定义 享元模式是一种结构型设计模式,旨在有效地共享对象以减少内存使用和提高性能。该模式的核心思想是通过共享尽可能多的相似对象来减少内存占用。它将对象分为可共享的内部状态和不可共享的外部状态。内部状态是对象的固有属性,可以在多个对象之…...
)
React配置代理(proxy)
使用axios进行请求,而配置代理过程。 第一种 在package.json中,添加proxy配置项,之后所有的请求都会指向该地址 但这种方法只能配置一次,也只有一个 示例: "proxy":"https://localhost:5000" 添加后&am…...
队列(Queue):先进先出的数据结构队列
栈与队列https://blog.csdn.net/qq_45467165/article/details/127958960?csdn_share_tail%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22127958960%22%2C%22source%22%3A%22qq_45467165%22%7D 队列(Queue)是一种常见的线…...

CentOS ens160 显示disconnected
使用nmcli device查看网卡状态,显示如图: 检查宿主机系统VMware DHCP Sevice和VMware NAT Sevice服务是否正常运行。 右键点击我的电脑管理按钮,打开计算机管理点击服务...

使用 ChatGPT 创建 PowerPoint 演示文稿
让 ChatGPT 成为您的助手来帮助您编写电子邮件很简单,因为众所周知,它非常能够生成文本。很明显,ChatGPT 无法帮助您做饭。但您可能想知道它是否可以生成文本以外的其他内容。在上一篇文章中,您了解到 ChatGPT 只能通过中间语言为您生成图形。在这篇文章中,您将了解使用中…...
matlab将数组值划分为两类
例如:大于0的处理为1,小于0的处理为-1. 当然,可以选择循环结构和选择结构,但是效率会很低。 这里直接使用逻辑语句完成。 % 不使用循环语句,将数组内值划分为两类 clc; clearvars; a[-0.1422 , -0.0433 , 0.1131 …...
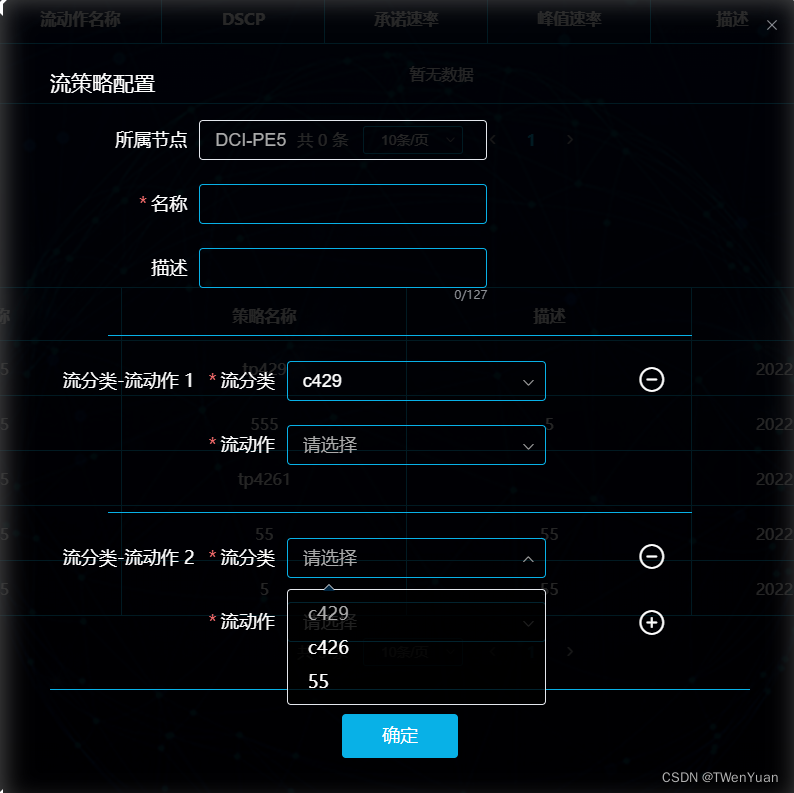
【点击新增一个下拉框 与前一个内容一样 但不能选同一个值】
点击新增一个下拉框 与前一个内容一样 但不能选同一个值 主要是看下拉选择el-option的disabled,注意不要混淆 <el-form label-width"120px" :model"form" ref"form" style"color: #fff"><template v-for"(trapolicy, i…...
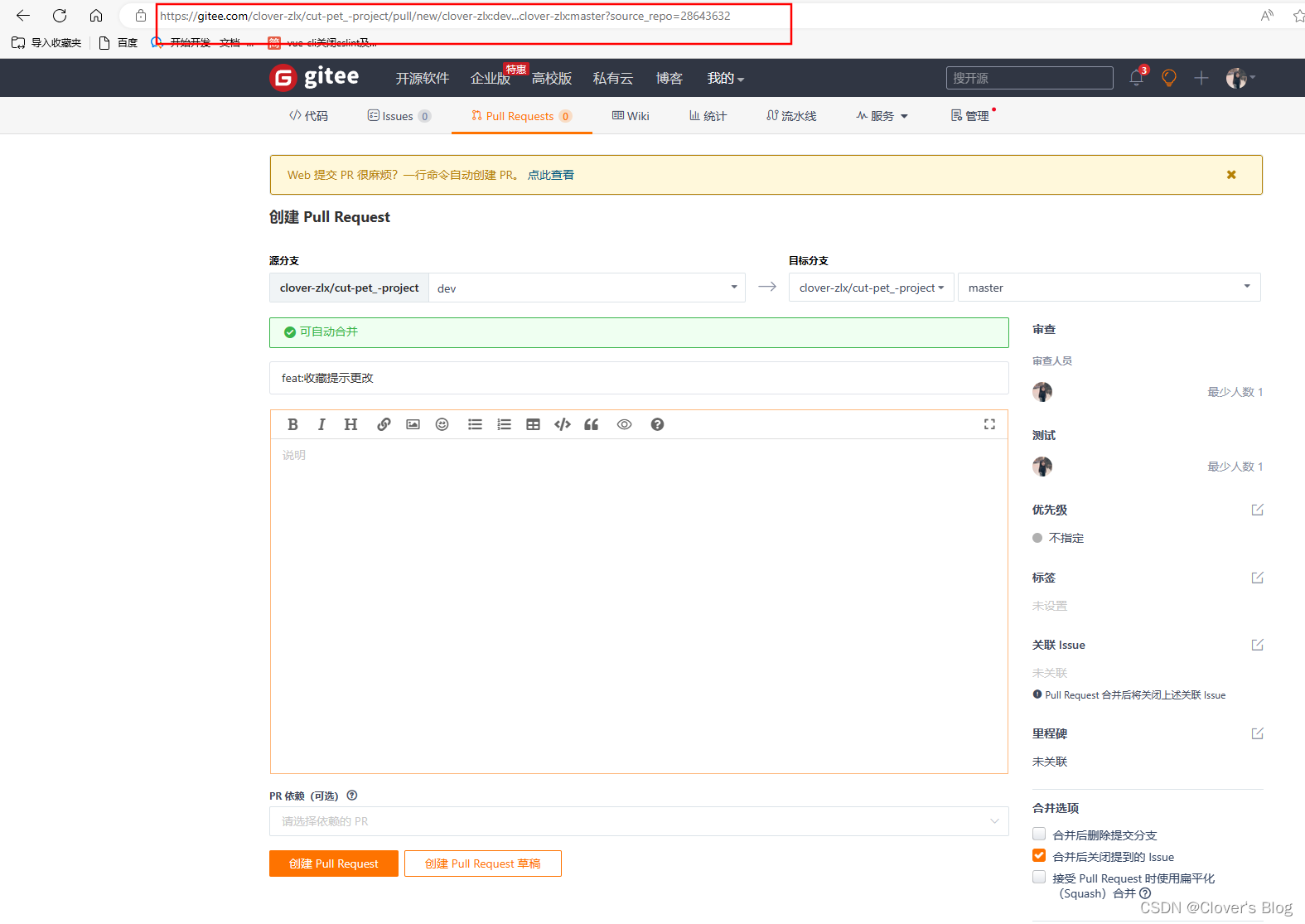
【Gitee提交pr】
Gitee提交pr 什么是pr怎样提交一个pr嘞? 什么是pr pr:指的是将自己的修改从自己的账号仓库dev下提交到官方账号仓库master下; 通俗来讲就是Gitee线上有属于自己的分支,然后本地在自己地分支修改完代码之后,提交到自己的线上分支&a…...
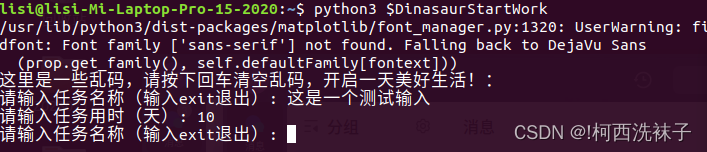
一款打工人必备的电脑端自律软件!!冲鸭打工人!!
你!有没有渴望进步!! 你!有没有渴望变强!!! 成为大佬!!!超越巨佬!!! 这就是一款为这样的你量身定做的程序:输入…...

【Vue框架】 router和route是什么关系
前言 之前没太注意,写着写着突然发现它们貌似不太一样,记录以下,回顾的看总结就好。 1、总结✨ route:当前激活路由的对象,用于访问和操作当前路由的信息 router:管理多个route的对象,整个应…...

整理mongodb文档:聚合管道
个人博客 整理mongodb文档:聚合管道 个人博客,求关注,电脑版看体验更加,如果不够清晰,请指出来,谢谢 文章概叙 文章主要通过几个常用的聚合表达式来介绍聚合管道的使用,以及从索引的角度来介绍聚合管道…...
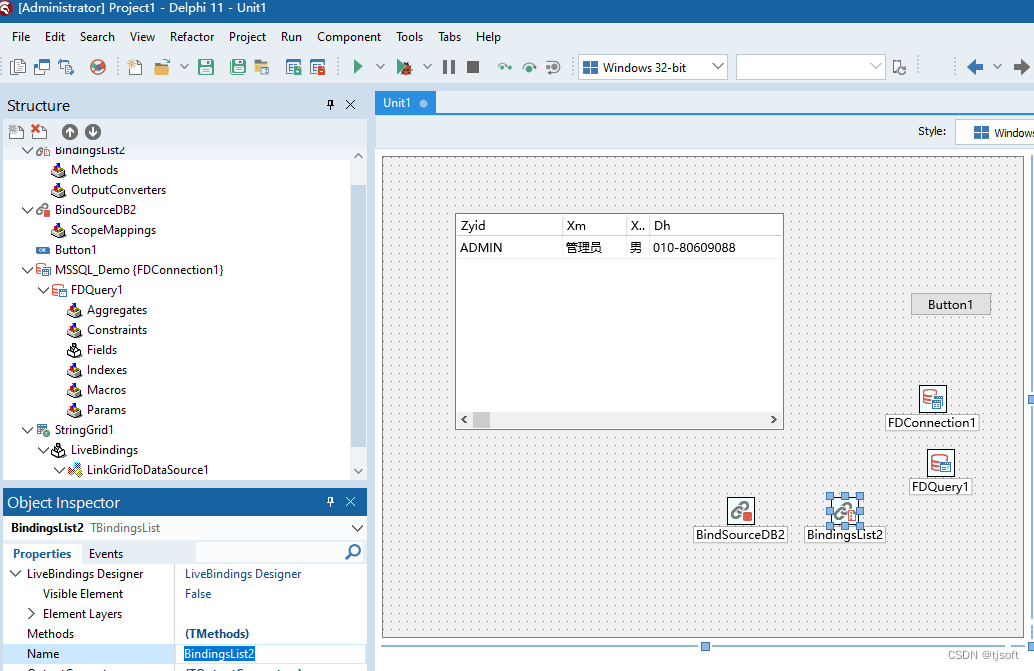
Delphi 11.3 FMX 多设备平台中使用 TGrid 实现类似 TDBGrid 的效果
Delphi Firemonkey 中 TDBGrid 这个控件已经没有了。如何实现类似这个效果呢。其实可以用TGrid 来实现。以下用 11.3 来讲解。 查询里面用到的 connection 和 query 等控件那些一般的数据库用法,就不做过多描述了。请参考其他资料。 方法一.通过界面配置来实现 在…...

Qt-事件循环与QtConcurrent、QThread结合使用时注意的点
QEventLoop和QtConcurrent可以结合使用达到主线程ui不阻塞同步执行的效果,但是要小心避坑,查看如下代码: QEventLoop loop; QtConcurrent::run([&]() {doSomething();loop.quit(); }); loop.exec();上述写法存在两个问题: Q…...

八大排序算法-选择排序
介绍选择排序:每一次从待排序序列中找出最小值和待排序序列的第一个值进行交换,重复这个过程,直到待排序序列没有值选择排序:时间复杂度O(n^2) 空间复杂度O(1) 稳定性:不稳定 难度范围:简单可以设置一个变量来保存最小…...

Cursor对话历史导出扩展:基于DOM逆向的AI协作数据备份方案
1. 项目概述:一个为开发者解放生产力的“数据保险箱”如果你和我一样,日常重度依赖 Cursor 这款 AI 编程神器,那你一定有过这样的焦虑:那些与 AI 深度对话产生的宝贵上下文、精心调教出的项目特定提示词、甚至是 AI 帮你重构的代码…...

NoFences:Windows桌面分区终极免费解决方案
NoFences:Windows桌面分区终极免费解决方案 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 在Windows系统中,桌面图标管理一直是用户面临的常见挑战。…...

Rusted PackFile Manager:Total War模组开发的终极解决方案,3分钟快速上手指南
Rusted PackFile Manager:Total War模组开发的终极解决方案,3分钟快速上手指南 【免费下载链接】rpfm Rusted PackFile Manager (RPFM) is a... reimplementation in Rust and Qt6 of PackFile Manager (PFM), one of the best modding tools for Total …...

音乐标签混乱的终结者:music-tag-web如何用3个步骤帮你重建完美音乐库
音乐标签混乱的终结者:music-tag-web如何用3个步骤帮你重建完美音乐库 【免费下载链接】music-tag-web 音乐标签编辑器,可编辑本地音乐文件的元数据(Editable local music file metadata.) 项目地址: https://gitcode.com/gh_mi…...

对话式AI应用开发实战:基于Bolna框架的语音助手构建与优化指南
1. 项目概述:Bolna,一个面向对话式AI应用的开源编排框架如果你正在构建一个需要处理语音或文本对话的AI应用,比如一个智能客服、一个语音助手,或者一个能通过电话自动处理预约的机器人,你可能会立刻想到几个核心挑战&a…...

从零构建μC/OS-II硬件抽象层:以ARM7 LPC2292为例详解移植核心
1. 项目概述与核心思路十年前,我第一次把μC/OS-II从一个ARM7开发板搬到另一个不同型号的ARM7芯片上,光是改启动文件和中断向量表就折腾了一周。那时候我就想,要是有一套标准化的“中间层”,能把芯片底层的差异给屏蔽掉࿰…...

SecureCRT 9.1.0不止是安装:揭秘高级功能如会话日志、脚本自动化与安全配置最佳实践
SecureCRT 9.1.0高阶实战:从会话审计到自动化运维的全栈指南 SecureCRT早已超越基础终端工具的范畴,成为运维工程师手中的瑞士军刀。当大多数教程还在反复讲解安装步骤时,真正的高阶用户已经在用会话日志构建操作审计体系,通过脚本…...

Git远程仓库核心原理与团队协作实战指南
1. 项目概述:为什么远程仓库是Git协作的基石如果你已经用Git在本地创建了项目,并且熟练地使用git add和git commit来记录每一次代码的变更,那么恭喜你,你已经掌握了版本控制的个人副本。但这仅仅是Git能力的冰山一角。真正的威力&…...

从IoU到Shape-IoU:如何让损失函数“看见”边界框的形状与尺度
1. 边界框回归的进化史:从IoU到Shape-IoU 目标检测任务中,边界框回归就像给物体"画框"的过程。早期的IoU(Intersection over Union)指标简单直观——用预测框和真实框的交集面积除以并集面积。这个指标在2016年之前是绝…...