Kuka机器人设计通用码垛程序
假设需要一个码垛程序, 从输送线抓到托盘, 托盘每层4个, 需要码5层, 可以用以下程序架构设计:
1, 再config中定义层数cengshu , 每层码垛的个数(码垛的次数)cishu , 每层的高度levelHeight , 码垛放置点的集合putPoint[,] ,预放点1集合prePut1[,], 预放点2集合prePut2[,]
DECL INT cengshu = 0DECL INT cishu = 0DECL INT levelHeight = 200DECL FRAME putPoint[10,10]DECL FRAME prePut1[10,10]DECL FRAME prePut2[10,10]
码垛放件程序
&ACCESS RVO1
&COMMENT put2
DEF put2 ( )
;FOLD INI;FOLD BASISTECH INIGLOBAL INTERRUPT DECL 3 WHEN $STOPMESS==TRUE DO IR_STOPM ( )INTERRUPT ON 3 BAS (#INITMOV,0 );ENDFOLD (BASISTECH INI);FOLD USER INI;Make your modifications here;ENDFOLD (USER INI)
;ENDFOLD (INI)IF FALSE THEN;FOLD LIN putBase CONT Vel=2 m/s CPDAT0 Tool[1]:Tool1 Base[0];%{PE}%R 8.3.22,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:LIN, 2:putBase, 3:C_DIS C_DIS, 5:2, 7:CPDAT0
$BWDSTART=FALSE
LDAT_ACT=LCPDAT0
FDAT_ACT=FputBase
BAS(#CP_PARAMS,2)
LIN XputBase C_DIS C_DIS
;ENDFOLDENDIFIF (cengshu == 1) OR (cengshu == 2) OR (cengshu == 3) OR (cengshu == 4) OR (cengshu == 5) THENIF cishu == 1 THENputPoint[cengshu,cishu]= XputBaseputPoint[cengshu,cishu].X = putPoint[cengshu,cishu].XputPoint[cengshu,cishu].Y = putPoint[cengshu,cishu].YputPoint[cengshu,cishu].Z = putPoint[cengshu,cishu].Z+(cengshu-1)*levelHeightENDIFIF cishu == 2 THENputPoint[cengshu,cishu]= XputBaseputPoint[cengshu,cishu].X = putPoint[cengshu,cishu].X+10putPoint[cengshu,cishu].Y = putPoint[cengshu,cishu].YputPoint[cengshu,cishu].Z = putPoint[cengshu,cishu].Z+(cengshu-1)*levelHeightENDIFIF cishu == 3 THENputPoint[cengshu,cishu]= XputBaseputPoint[cengshu,cishu].X = putPoint[cengshu,cishu].X+10putPoint[cengshu,cishu].Y = putPoint[cengshu,cishu].Y+10putPoint[cengshu,cishu].Z = putPoint[cengshu,cishu].Z+(cengshu-1)*levelHeightENDIFIF cishu == 3 THENputPoint[cengshu,cishu]= XputBaseputPoint[cengshu,cishu].X = putPoint[cengshu,cishu].XputPoint[cengshu,cishu].Y = putPoint[cengshu,cishu].Y+10putPoint[cengshu,cishu].Z = putPoint[cengshu,cishu].Z+(cengshu-1)*levelHeightENDIFENDIF;shoudong dao preput1 prePut1[cengshu,cishu]= putPoint[cengshu,cishu]prePut1[cengshu,cishu].X = prePut1[cengshu,cishu].X+200prePut1[cengshu,cishu].Y = prePut1[cengshu,cishu].Y+200prePut1[cengshu,cishu].Z = prePut1[cengshu,cishu].Z+200prePut2[cengshu,cishu]= putPoint[cengshu,cishu]prePut2[cengshu,cishu].X = prePut2[cengshu,cishu].X+100prePut2[cengshu,cishu].Y = prePut2[cengshu,cishu].Y+100prePut2[cengshu,cishu].Z = prePut2[cengshu,cishu].Z+100PTP prePut1[cengshu,cishu] C_DISPTP prePut2[cengshu,cishu] C_DIS LIN putPoint[cengshu,cishu] C_DIS$out[1]=FALSE ;fangjianWAIT SEC 0.5PTP prePut2[cengshu,cishu] C_PTP PTP prePut1[cengshu,cishu] C_PTPEND
主程序:
c&ACCESS RVO
&REL 7
&PARAM EDITMASK = *
&PARAM TEMPLATE = C:\KRC\Roboter\Template\vorgabe
&PARAM DISKPATH = KRC:\R1\Program\PRO
DEF test( )
;FOLD INI;%{PE};FOLD BASISTECH INIGLOBAL INTERRUPT DECL 3 WHEN $STOPMESS==TRUE DO IR_STOPM ( )INTERRUPT ON 3 BAS (#INITMOV,0 );ENDFOLD (BASISTECH INI);FOLD USER INI;Make your modifications here;ENDFOLD (USER INI)
;ENDFOLD (INI)$out[1]=FALSE$out[2]=FALSE;FOLD PTP HOME Vel= 100 % DEFAULT;%{PE}%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:HOME, 3:, 5:100, 7:DEFAULT
$BWDSTART = FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS (#PTP_PARAMS,100 )
$H_POS=XHOME
PTP XHOME
;ENDFOLDLOOPFOR cengshu = 1 TO 5FOR cishu = 1 TO 4WAIT FOR $in[1]pick ();FOLD PTP p1 CONT Vel=100 % DEFAULT Tool[1]:Tool1 Base[0];%{PE}%R 8.3.22,%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:p1, 3:C_PTP, 5:100, 7:DEFAULT
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=Fp1
BAS(#PTP_PARAMS,100)
PTP Xp1 C_PTP
;ENDFOLDput2 ();FOLD PTP HOME Vel= 100 % DEFAULT;%{PE}%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:HOME, 3:, 5:100, 7:DEFAULT
$BWDSTART = FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=FHOME
BAS (#PTP_PARAMS,100 )
$H_POS=XHOME
PTP XHOME
;ENDFOLDENDFOR
ENDFOR$out[3]=TRUEWAIT SEC 1$out[3]=FALSEENDLOOP END
取件程序:
&ACCESS RVO1
&COMMENT put1
DEF pick ( )
;FOLD INI;FOLD BASISTECH INIGLOBAL INTERRUPT DECL 3 WHEN $STOPMESS==TRUE DO IR_STOPM ( )INTERRUPT ON 3 BAS (#INITMOV,0 );ENDFOLD (BASISTECH INI);FOLD USER INI;Make your modifications here;ENDFOLD (USER INI)
;ENDFOLD (INI);FOLD PTP p2 CONT Vel=100 % DEFAULT Tool[1]:Tool1 Base[0];%{PE}%R 8.3.22,%MKUKATPBASIS,%CMOVE,%VPTP,%P 1:PTP, 2:p2, 3:C_PTP, 5:100, 7:DEFAULT
$BWDSTART=FALSE
PDAT_ACT=PDEFAULT
FDAT_ACT=Fp2
BAS(#PTP_PARAMS,100)
PTP Xp2 C_PTP
;ENDFOLD;FOLD LIN p3 CONT Vel=2 m/s CPDAT0 Tool[1]:Tool1 Base[0];%{PE}%R 8.3.22,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:LIN, 2:p3, 3:C_DIS C_DIS, 5:2, 7:CPDAT0
$BWDSTART=FALSE
LDAT_ACT=LCPDAT0
FDAT_ACT=Fp3
BAS(#CP_PARAMS,2)
LIN Xp3 C_DIS C_DIS
;ENDFOLD$OUT[1]=TRUEWAIT SEC 1;FOLD LIN p4 CONT Vel=2 m/s CPDAT0 Tool[1]:Tool1 Base[0];%{PE}%R 8.3.22,%MKUKATPBASIS,%CMOVE,%VLIN,%P 1:LIN, 2:p4, 3:C_DIS C_DIS, 5:2, 7:CPDAT0
$BWDSTART=FALSE
LDAT_ACT=LCPDAT0
FDAT_ACT=Fp4
BAS(#CP_PARAMS,2)
LIN Xp4 C_DIS C_DIS
;ENDFOLDEND
相关文章:

Kuka机器人设计通用码垛程序
假设需要一个码垛程序, 从输送线抓到托盘, 托盘每层4个, 需要码5层, 可以用以下程序架构设计: 1, 再config中定义层数cengshu , 每层码垛的个数(码垛的次数)cishu , 每层的高度levelHeight , 码垛放置点的集合putPoint[,] ,预放点1集合prePut1[,], 预放点2集合prePut2[,] DEC…...
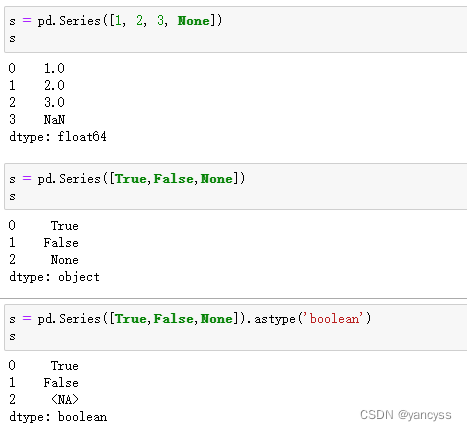
pandas由入门到精通-数据清洗-扩展数据类型
pandas-02-数据清洗&预处理 扩展数据类型1. 传统数据类型缺点2. 扩展的数据类型3. 如何转换类型文中用S代指Series,用Df代指DataFrame 数据清洗是处理大型复杂情况数据必不可少的步骤,这里总结一些数据清洗的常用方法:包括缺失值、重复值、异常值处理,数据类型统计,分…...
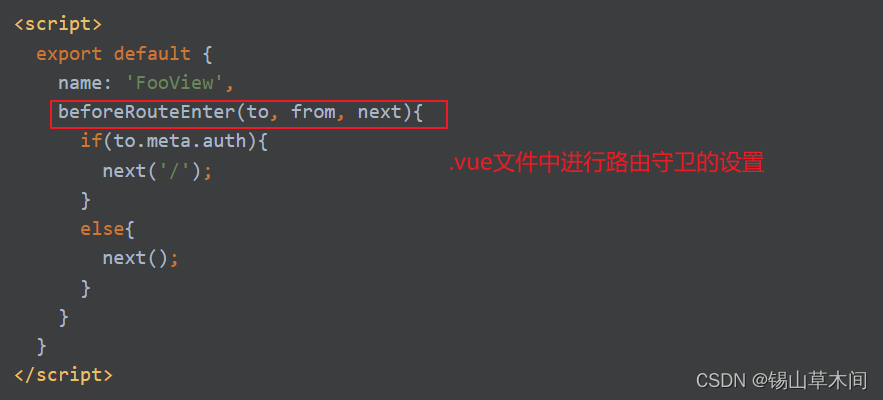
深入理解 Vue Router:构建可靠的前端路由系统
目录 01-什么是前端路由以及路由两种模式实现原理02-路由的基本搭建与嵌套路由模式03-动态路由模式与编程式路由模式04-命名路由与命名视图与路由元信息05-路由传递参数的多种方式及应用场景06-详解route对象与router对象07-路由守卫详解及应用场景 01-什么是前端路由以及路由两…...
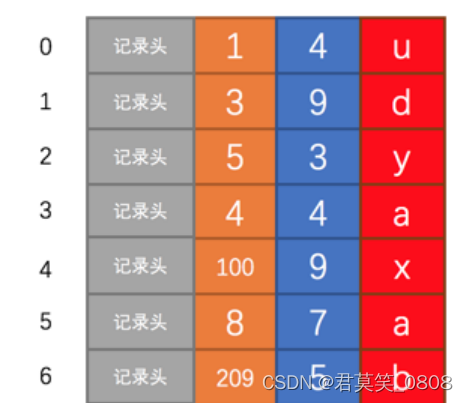
Mysql B+数索引结构
一、B树和B树区别 二、 B 树形成过程 三、页分裂过程 3.1 页分裂过程实例 3.1.1 原有数据1、3、5形成如下数据页 3.1.2 先新插入数据4,因为 页10 最多只能放3条记录所以我们不得不再分配一个新页: 新分配的数据页编号可能并不是连续的,也…...
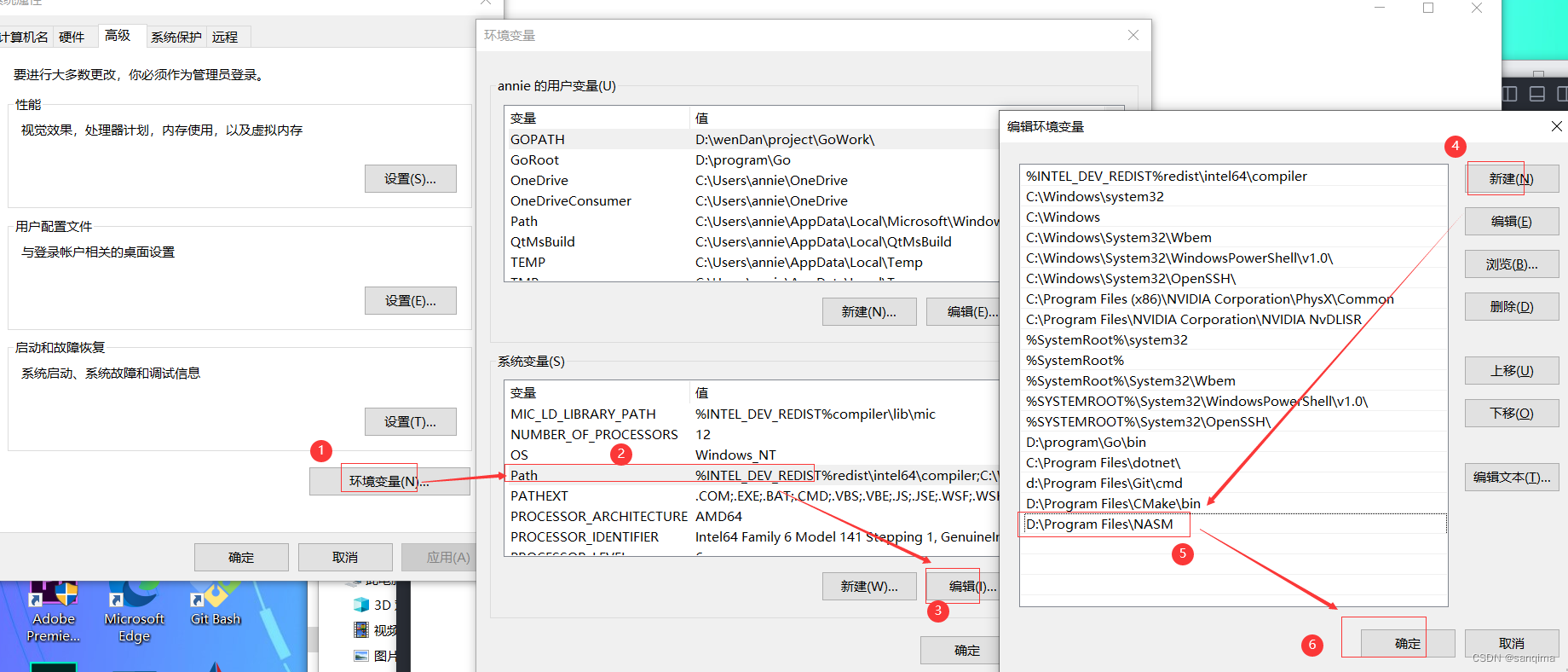
在window上配置NASM
NASM是支持x86、x64架构CPU的汇编器(汇编软件);NASM也支持大量的文件格式,包括Linux,*BSD,a.out,ELF,COFF,Mach−O,Microsoft 16−bit OBJ,Win32以及Win64,同…...

用QT实现MVP模式
近些天用qt 作项目,遇到参数界面.偷闲写个mvp模式示例. mvp模式重要的有两点 1 低耦合: 界面与后端数据类,不直接引用,可方便替换. 2 形成界面驱动-界面更新的闭环.:通过函数指针类技术,让数据自动回流. MVP (Model-View-Presenter) 视图(View): 接…...
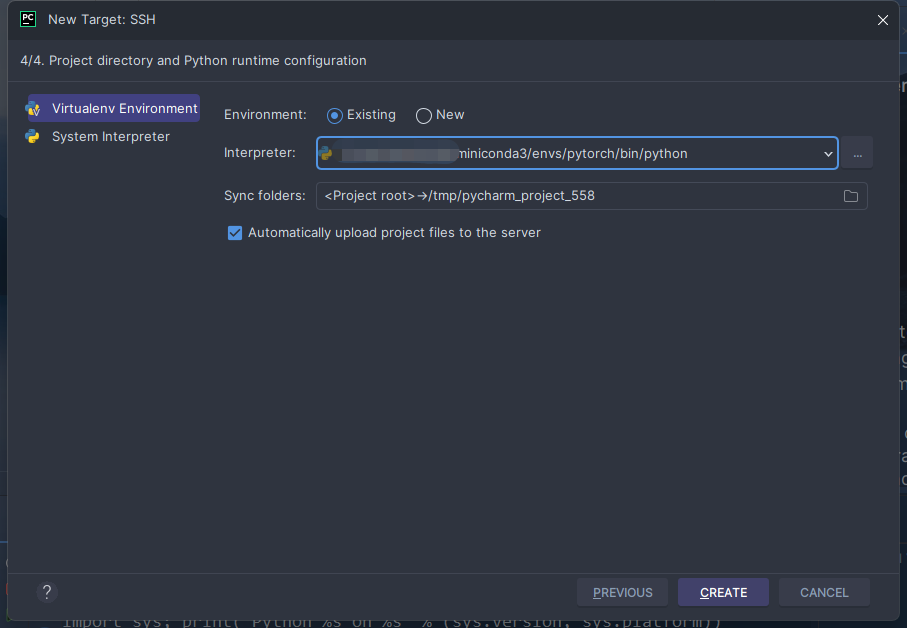
(2023)Linux安装pytorch并使用pycharm远程编译运行
(2023)Linux安装pytorch并使用pycharm远程编译运行 安装miniconda 这部分参考我这篇博客的前半部分Linux服务器上通过miniconda安装R(2022)_miniconda 安装r_Dream of Grass的博客-CSDN博客 创建环境 创建一个叫pytorch的环境…...
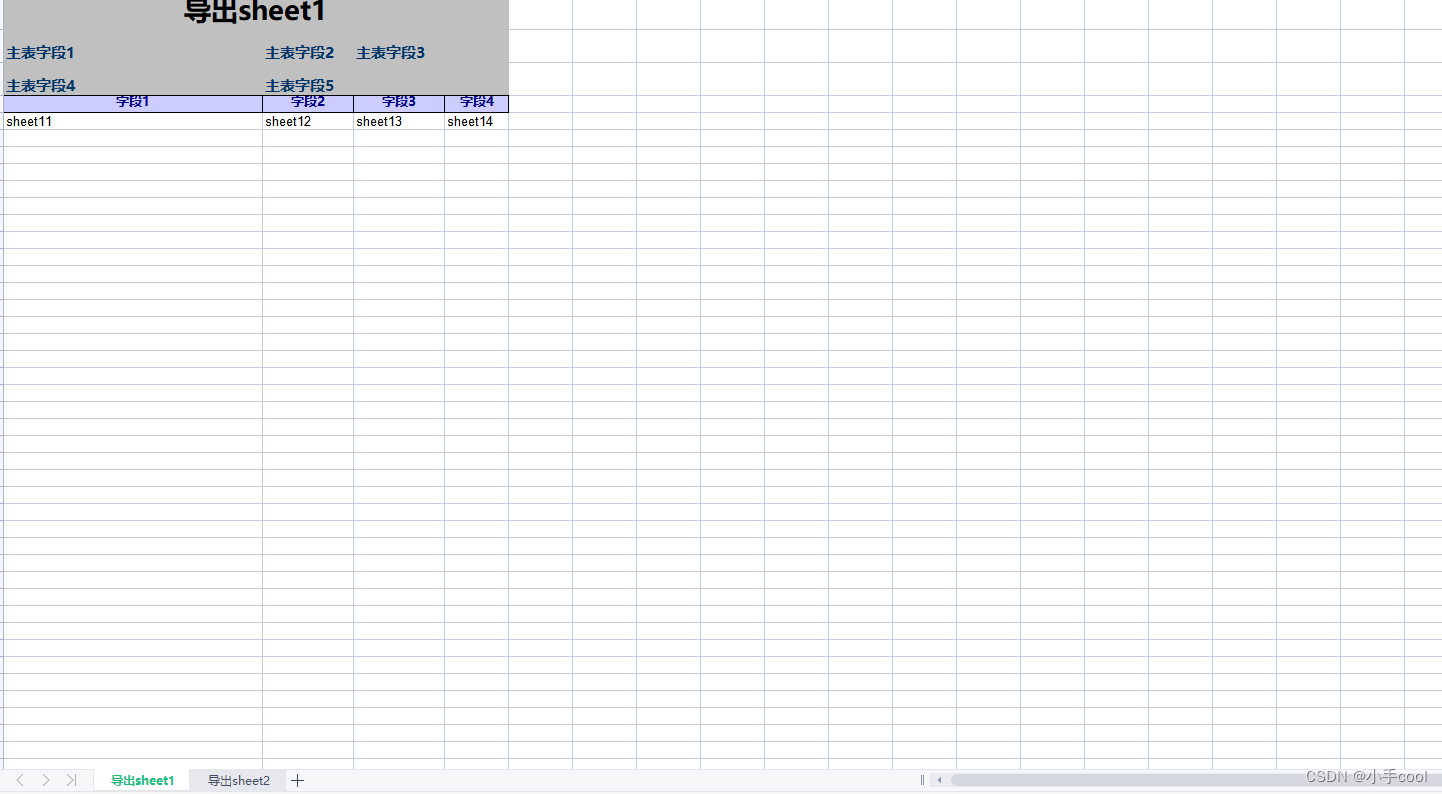
poi带表头多sheet导出
导出工具类 package com.hieasy.comm.core.excel;import com.hieasy.comm.core.excel.fragment.ExcelFragment; import com.hieasy.comm.core.utils.mine.MineDateUtil; import org.apache.poi.hssf.usermodel.*; import org.apache.poi.ss.usermodel.*; import org.apache.po…...
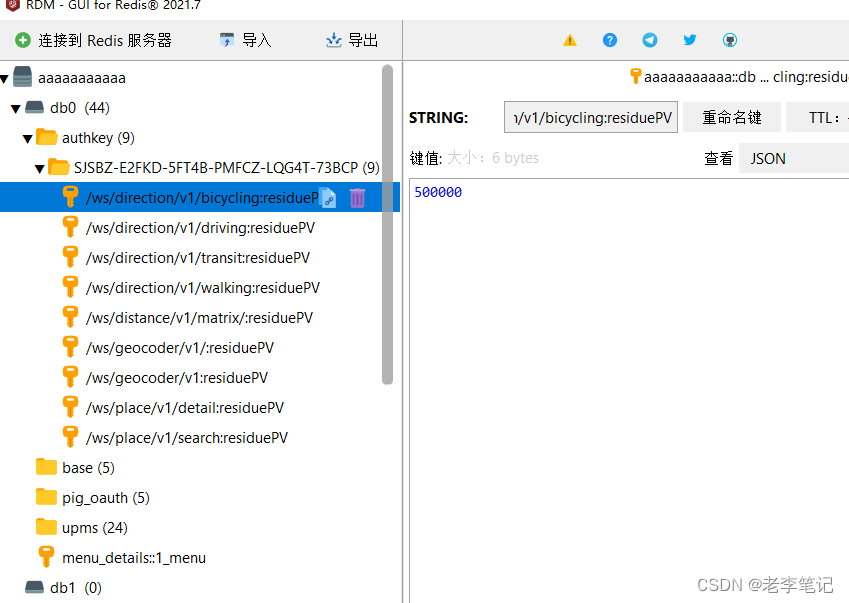
RedisDesktopManager(redis客户端,可输入用户名密码)
RedisDesktopManager(redis客户端,可输入用户名密码) Redis桌面管理器(又名RDM) - 是一个用于Windows,Linux和MacOS的快速开源Redis数据库管理应用程序。可以使用url连接或账号密码。 redis设置账号密码后…...
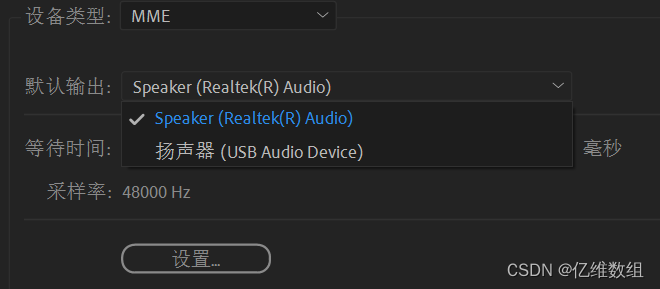
【Adobe After Effects】关于ae点击空格不会播放反而回退一帧的解决方案
最近玩ae的时候遇见了一个小问题,就是有时候敲空格,视频没办法播放,反而会回退一帧,经过摸索发现了一个解决办法: 点击编辑---首选项 然后选择“音频硬件” 然后选择正确的默认输出,点击确定即可...
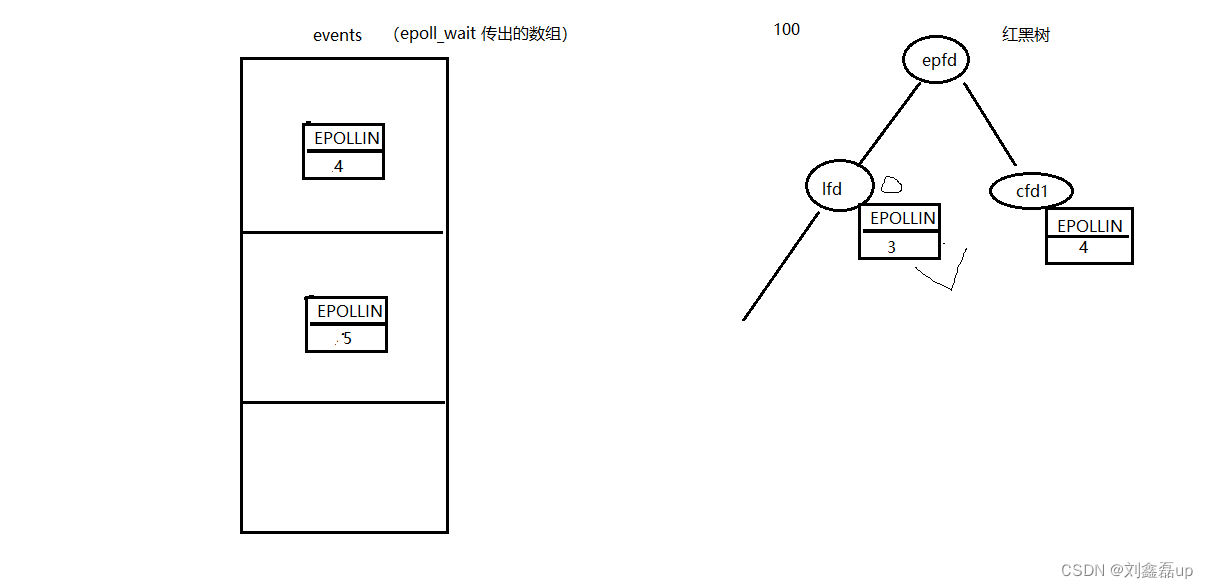
Linux网络编程:多路I/O转接服务器(select poll epoll)
文章目录: 一:select 1.基础API select函数 思路分析 select优缺点 2.server.c 3.client.c 二:poll 1.基础API poll函数 poll优缺点 read函数返回值 突破1024 文件描述符限制 2.server.c 3.client.c 三:epoll …...

Mybatis系列原理剖析之项目实战:自定义持久层框架
Mybatis系列原理剖析之:项目实战:自定义持久层框架 持久层是JAVA EE三层体系架构中,与数据库进行交互的一层,持久层往往被称为dao层。需要说明的是,持久层的技术选型有很多,绝不仅仅只有mybatis一种。像早…...

阿里云 Serverless 应用引擎 2.0,正式公测!
阿里云 Serverless 应用引擎 SAE2.0 正式公测上线!全面升级后的 SAE2.0 具备极简体验、标准开放、极致弹性三大优势,应用冷启动全面提效,秒级完成创建发布应用,应用成本下降 40% 以上。 此外,阿里云还带来容器服务 Se…...

西北大学计算机考研844高分经验分享
西北大学计算机考研844经验分享 个人介绍 本人是西北大学22级软件工程研究生,考研专业课129分,过去一年里在各大辅导机构任职,辅导考研学生专业课844,辅导总时长达288小时,帮助多名学生专业课高分上岸。 前情回顾…...

【java并发编程的艺术读书笔记】volatile关键字介绍、与synchronized的区别
volatile的简介 volatile是轻量级锁,只用来修饰变量,保证这个变量在多线程下的可见性以及一致性(一个volatile变量被线程修改时会立刻通知其他所有线程),防止指令重排序,但是并不能保证绝对的线程安全 vol…...

LinkedList的顶级理解
目录 1.LinkedList的介绍 LinkedList的结构 2.LinkedList的模拟实现 2.1创建双链表 2.2头插法 2.3尾插法 2.4任意位置插入 2.5查找关键字 2.6链表长度 2.7遍历链表 2.8删除第一次出现关键字为key的节点 2.9删除所有值为key的节点 2.10清空链表 2.11完整代码 3.…...

再学http-为什么文件上传要转成Base64?
1 前言 最近在开发中遇到文件上传采用Base64的方式上传,记得以前刚开始学http上传文件的时候,都是通过content-type为multipart/form-data方式直接上传二进制文件,我们知道都通过网络传输最终只能传输二进制流,所以毫无疑问他们本…...
使用oracleVM搭建虚拟机
选择新建,点击 取名字,选择你的安装路径,选择你爹镜像光盘,再勾选下面的,表示跳过一些步骤 其他的都可以默认,下一步即可 创建好了,点击设置,改变光驱,硬盘的顺序 等待它…...

深入探讨C存储类和存储期——Storage Duration
🔗 《C语言趣味教程》👈 猛戳订阅!!! —— 热门专栏《维生素C语言》的重制版 —— 💭 写在前面:这是一套 C 语言趣味教学专栏,目前正在火热连载中,欢迎猛戳订阅&#…...
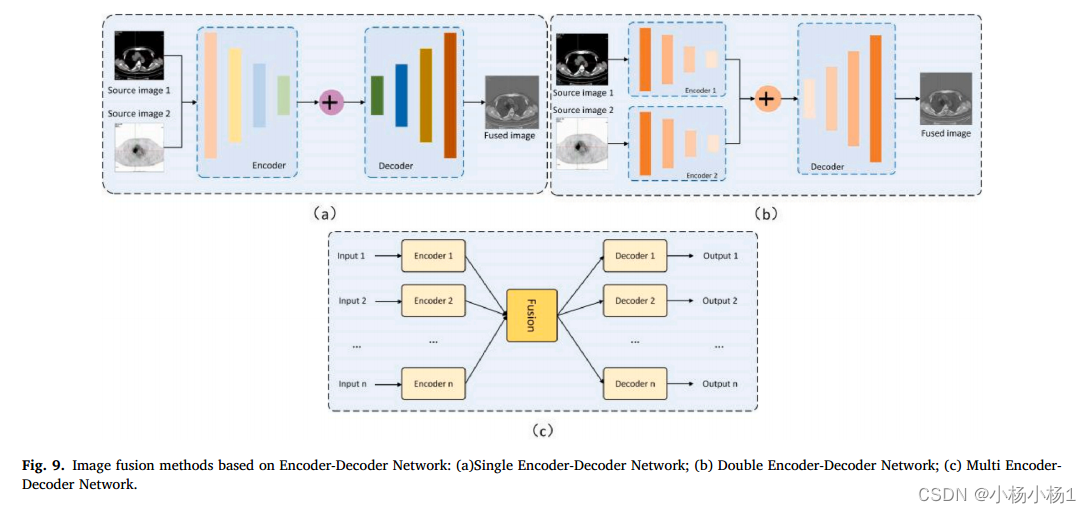
医学图像融合的深度学习方法综述
文章目录 Deep learning methods for medical image fusion: A review摘要引言非端到端的融合方法基于深度学习的决策映射基于深度学习的特征提取 端到端图像融合方法基于卷积神经网络(CNN)的图像融合方法单级特征融合方法多级特征融合基于残差神经网络的图像融合方法基于密集神…...
)
手把手教你用llama.cpp在树莓派上跑大模型(附完整配置流程)
在树莓派上部署llama.cpp的完整实践指南 树莓派作为一款价格亲民且功能强大的微型计算机,近年来在边缘计算和嵌入式AI领域崭露头角。本文将详细介绍如何在树莓派上部署llama.cpp这一轻量级大语言模型推理框架,让开发者能够在资源受限的环境中体验前沿AI技…...

重构求职效率:boss_batch_push批量投递工具的颠覆性价值
重构求职效率:boss_batch_push批量投递工具的颠覆性价值 【免费下载链接】boss_batch_push Boss直聘批量投简历,解放双手 项目地址: https://gitcode.com/gh_mirrors/bo/boss_batch_push boss_batch_push是一款专为Boss直聘平台设计的开源自动化投…...

STM32除零运算不崩溃的机制与配置解析
1. STM32单片机除零运算不崩溃的底层机制解析 在嵌入式开发领域,STM32系列单片机因其出色的性能和丰富的外设资源而广受欢迎。许多从传统PC平台转向嵌入式开发的工程师都会发现一个有趣的现象:在STM32上执行除零操作时,程序竟然不会像在PC上那…...

Windows ISO制作与补丁集成自动化工具实战指南:从手动操作到批量部署的效率革命
Windows ISO制作与补丁集成自动化工具实战指南:从手动操作到批量部署的效率革命 【免费下载链接】Win_ISO_Patching_Scripts Win_ISO_Patching_Scripts 项目地址: https://gitcode.com/gh_mirrors/wi/Win_ISO_Patching_Scripts 在数字化时代,系统…...
模型)
【AI】开源文字转语音(TTS)模型
目前开源界在文字转语音(TTS)领域非常活跃,特别是针对多角色对话、情感控制和声音克隆方面,涌现了几个非常强大的模型。 结合(多角色、好用、开源),以下几款目前(截至2026年4月&…...

学习网络安全至少需要什么配置的电脑?
很多同学对于学习 Web 渗透所需的电脑配置仍有疑问,所以老师结合自己的教学经验,总结了关于电脑配置要求的一些内容,遂成此文。当然,对于电脑配置的追求是无上限的,所以有条件的话最好还是搞一台配置强劲的电脑。 一、…...

前端测试的学习阶段,由基础到进阶的过程认识.....
前言:突然想起刚入行的学习感悟,一个知识点不懂的背后,是整个知识体系的欠缺, 那会从后端转入前端(非科班)有时候一个报错不知道从何找起,一、单元测试 【已经案例和知识相结合,可看…...

嵌入式开发必备:三大代码对比工具深度评测
1. 代码对比工具概述作为一名嵌入式开发工程师,我每天都要处理大量的代码修改和版本对比工作。在多年的开发实践中,我发现选择合适的代码对比工具能极大提升工作效率。虽然Beyond Compare是业内公认的标杆产品,但实际工作中我们还有更多选择&…...

BP算法在SAR成像中的高效实现与优化策略
1. BP算法在SAR成像中的核心原理 BP(Back Projection)算法是合成孔径雷达(SAR)成像中最直观的时域处理方法。我第一次接触这个算法时,就被它那种"暴力美学"式的计算逻辑震撼到了——它不需要任何傅里叶变换的…...

【分布式理论】CAP PACELC
文章目录一、引言二、CAP理论2.1 CAP分别指的是什么?2.2 CAP 的经典表述:三选二2.1 CP 系统(牺牲可用性,保证一致性)2.2 AP 系统(牺牲一致性,保证可用性)三、PACELC理论3.1 PACELC的…...