四维图新 minemap实现地图漫游效果
原理就是不断改变地图中心点,改变相机角度方向,明白这一点,其他地图引擎譬如cesium都可效仿,本人就是通过cesium的漫游实现四维图新的漫游,唯一不足的是转弯的时候不能丝滑转向,尝试过应该是四维图新引擎的问题
/** @Description: * @Author: 大帅逼* @Date: 2023-08-17 17:52:09* @LastEditTime: 2023-08-21 15:39:15* @LastEditors: Do not edit* @Reference: */
export default function flyView (map, roadLine,nextIndex){let index = 1;let ding;let currentCenter;if(nextIndex){index = nextIndex;}const flyTime = 12000; //一段路程的飞行时间/*** 设置时间差* @returns 开始时间 结束时间*/function setExtentTime(time) {const startTime = new Date().getTime();const stopTime = startTime + time;return {stopTime,startTime };}/*** 相机转向角* @param {number} angle 角度* @returns {number} 弧度*/function bearings(startLat, startLng, destLat, destLng) {const y = Math.sin(destLng - startLng) * Math.cos(destLat);const x = Math.cos(startLat) * Math.sin(destLat) - Math.sin(startLat) * Math.cos(destLat) * Math.cos(destLng - startLng);const brng = Math.atan2(y, x);const brngDgr = brng * 180 / Math.PI;return brngDgr;}/*** 控制飞行动画*/function flyExtent() {if(index>=roadLine.length-1){index = 1;}const time = setExtentTime(flyTime);const bearing = Math.abs(bearings(roadLine[index - 1].lat, roadLine[index - 1].lng, roadLine[index].lat, roadLine[index].lng));map.setCenter([roadLine[index - 1].lng,roadLine[index - 1].lat])map.setBearing(Math.abs(bearing));// const currentBearing = map.getBearing();// const angle = (bearing - currentBearing) / 5000;// const nowHeading = map.getBearing();// console.log(-bearing);// 构造循环体const loop = function () {const delTime = new Date().getTime() - time.startTime;const stepLng = (roadLine[index].lng - roadLine[index - 1].lng) / flyTime * delTime;const stepLat = (roadLine[index].lat - roadLine[index - 1].lat) / flyTime * delTime;const currentBearing = map.getBearing();if (delTime > 0) {const endPosition = [roadLine[index - 1].lng + stepLng,roadLine[index - 1].lat + stepLat];map.setCenter([endPosition[0], endPosition[1]]);// if(currentBearing <= bearing) {// map.setCameraBearing(currentBearing+angle);// console.log(angle);// }} };// 定时器实现动画ding = setInterval(() => {loop();if (new Date().getTime() - time.stopTime >= 0) {console.log(111);clearInterval(ding);index = ++index >= roadLine.length ? 0 : index;if (index != 0) {console.log(index);flyExtent();}}}, 100);function stopFlyExtent() {clearInterval(ding);currentCenter = map.getCenter();}function startFlyExtent() {roadLine[index-1].lng = currentCenter.lngroadLine[index-1].lat = currentCenter.latflyExtent(index);}return {stopFlyExtent,startFlyExtent,index};}/*** 切换相机转向角*/// function changeCameraHeading () {// // const changeTime = 2000;// // const time = setExtentTime(changeTime);// // const angle = (bearing - currentBearing) / changeTime;// // 构造循环体// // const loop = function () {// const currentCenter = map.getCenter();// // const currentBearing = map.getBearing();// const bearing = Math.abs(bearings(currentCenter.lat,currentCenter.lng, roadLine[index].lat, roadLine[index].lng));// // const delTime = new Date().getTime() - time.startTime;// // const heading = delTime * angle + currentBearing;// // if (delTime > 0) {// map.setBearing(-bearing);// // }// // };// // 定时器实现动画// // const ding = setInterval(() => {// // loop();// // if (new Date().getTime() - time.stopTime >= 0) {// // console.log(111);// // clearInterval(ding);// // // index = ++index >= roadLine.length ? 0 : index;// // // if (index != 0) {// // // console.log(index);// // // flyExtent();// // // }// // }// // }, 100);// }const control = flyExtent();return control;}const roadLine = [{lng: 118.30918373160092,lat: 33.8934430266404},{lng: 118.317598598913,lat: 33.89589007385073},{lng: 118.32260700135133,lat: 33.897263166704974},{lng: 118.32527174444655,lat: 33.897387332495924},
]
使用
this.control = flyView(map, roadLine);
this.control.startFlyExtent(); //控制开始
this.control.stopFlyExtent();//停止漫游
相关文章:

四维图新 minemap实现地图漫游效果
原理就是不断改变地图中心点,改变相机角度方向,明白这一点,其他地图引擎譬如cesium都可效仿,本人就是通过cesium的漫游实现四维图新的漫游,唯一不足的是转弯的时候不能丝滑转向,尝试过应该是四维图新引擎的…...
centos7安装MySQL8
Centos7安装MySQL8 MySQL版本:8.0.34 1.安装前准备 (1)查看是否安装mariadb [rootkb135 ~]# rpm -qa|grep mariadb (2)卸载mariadb并检查是否卸干净 [rootkb135 ~]# rpm -e --nodeps mariadb-libs-5.5.68-1.el7.x8…...

【IMX6ULL驱动开发学习】10.Linux I2C驱动实战:AT24C02驱动设计流程
前情回顾:【IMX6ULL驱动开发学习】09.Linux之I2C框架简介和驱动程序模板_阿龙还在写代码的博客-CSDN博客 目录 一、修改设备树(设备树用来指定引脚资源) 二、编写驱动 2.1 i2c_drv_read 2.2 i2c_drv_write 2.3 完整驱动程序 三、上机测…...
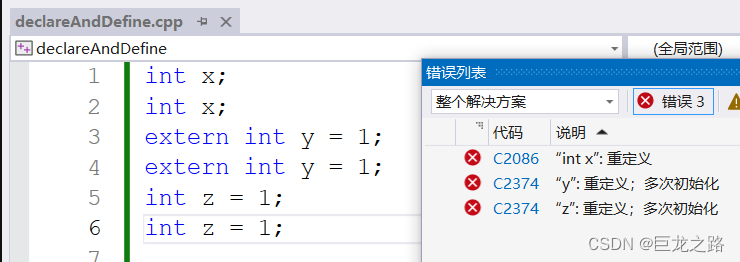
【C++】详解声明和定义
2023年8月28日,周一下午 研究了一个下午才彻底弄明白... 写到晚上才写完这篇博客。 目录 声明和定义的根本区别结构体的声明和定义声明结构体 定义结构体类的声明和定义函数的定义和声明声明函数 定义函数变量声明和定义声明变量定义变量 声明和定义的根本区别 …...

掌握C/C++协程编程,轻松驾驭并发编程世界
一、引言 协程的定义和背景 协程(Coroutine),又称为微线程或者轻量级线程,是一种用户态的、可在单个线程中并发执行的程序组件。协程可以看作是一个更轻量级的线程,由程序员主动控制调度。它们拥有自己的寄存器上下文…...

MyBatis-Plus的分页配置类
文章目录 package com.itheima.reggie.config;import com.baomidou.mybatisplus.extension.plugins.MybatisPlusInterceptor; import com.baomidou.mybatisplus.extension.plugins.inner.PaginationInnerInterceptor; import org.springframework.context.annotation.Bean; imp…...
)
排序算法-选择排序(Java)
选择排序 选择排序 (selection sort)的工作原理非常直接:开启一个循环,每轮从未排序区间选择最小的元素,将其放到已排序区间的末尾。 算法原理 排序数组:(2 4 3 1 5 2) …...

SpringBoot 怎么返回html界面
方法一: (1)html文件要放在resource下的static目录下(没有static 自己就创建一个文件夹) (2)在application.yml 中配置视图解析器 spring:mvc:view:prefix: /suffix: .html (3&a…...

watch computed 和 method
在Vue中,watch computed 和 method有啥区别,有啥作用,适用于何种情景并代码举例 在Vue中,watch、computed和methods是三种不同的属性,用于处理不同的场景和需求。 watch:watch用于监听数据的变化并执行相…...

数据结构,线性表有哪些
线性表是一种常见的数据结构,它的特点是数据元素之间存在一对一的线性关系。根据线性表的存储方式和实现方式,线性表主要有以下几种: 1. 顺序表(Sequential List): - 通常使用数组实现。 - 元素在内存中是连续…...

服务间通过Feign相互调用报错,参数是MultiparFile、参数是POJO报错
目录 1.Feign传文件报错,Feign不支持上传文件需要借助外面的依赖才可以实现上传 2.服务之间通过Feign相互调用传递DTO(实体对象)报错 1.Feign传文件报错,Feign不支持上传文件需要借助外面的依赖才可以实现上传 具体报错内容: FileUploadException: the request was reje…...

Flutter系列文章-Flutter应用优化
当涉及到优化 Flutter 应用时,考虑性能、UI 渲染和内存管理是至关重要的。在本篇文章中,我们将通过实例深入讨论这些主题,展示如何通过优化技巧改进你的 Flutter 应用。 代码性能优化 1. 使用 const 构造函数 在构建小部件时,尽…...
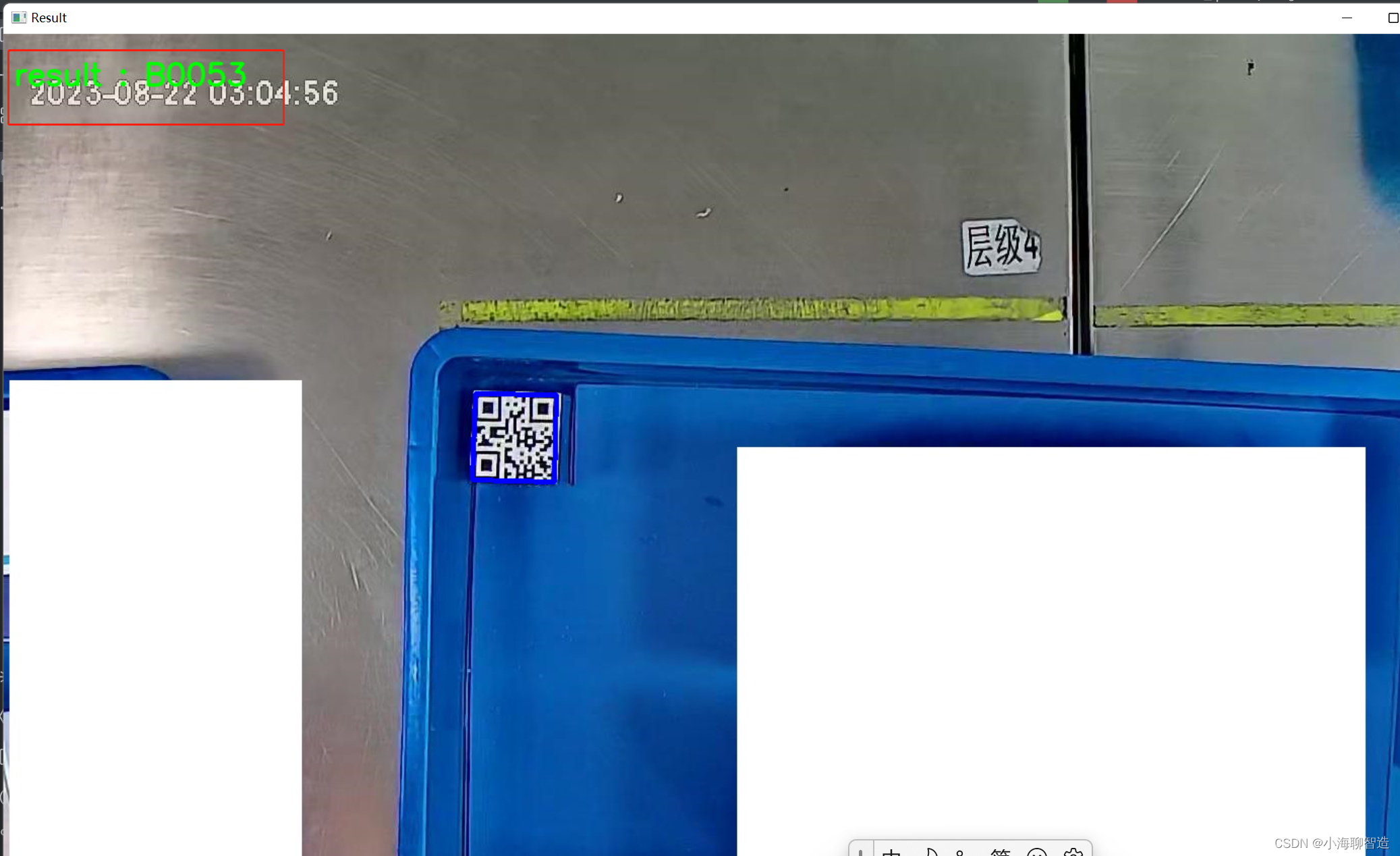
opencv案例03 -基于OpenCV实现二维码生成,发现,定位,识别
1.二维码的生成 废话不多说,直接上代码 # 生成二维码 import qrcode# 二维码包含的示例数据 data "B0018" # 生成的二维码图片名称 filename "qrcode.png" # 生成二维码 img qrcode.make(data) # 保存成图片输出 img.save(filename)img.sh…...

叠螺式污泥脱水机的要点及价格分析
诸城市鑫淼环保小编带大家了解一下叠螺式污泥脱水机的要点及价格分析 设备工作步骤 叠螺脱水机在工作时分为3个步骤,分别是稀释、脱水、自洗濯: 1、稀释:当螺旋推进轴迁移转变时,设在推进轴核心的多重固活叠片挪动,在重…...
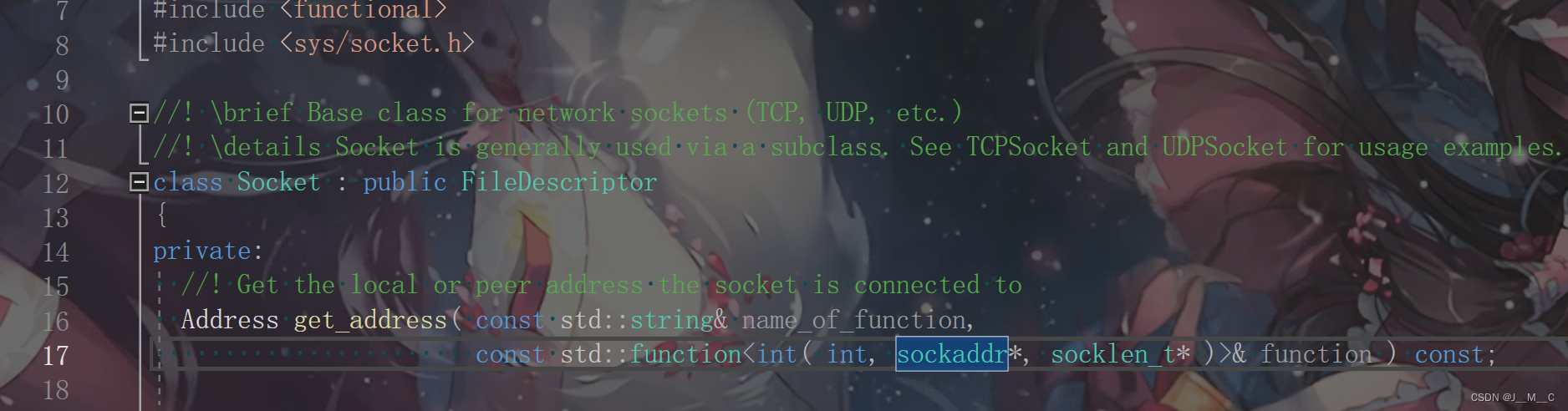
Visual Studio中Linux开发头文件intellisense问题的解决办法
文章目录 前言个人环境 SSH到WSL复制文件后记 前言 最近在用我心爱的Visual Studio配合WSL2做一些Linux开发,但是有一个问题,就是当我#include <sys/socket.h>,会提示找不到文件 我尝试了各种姿势,包括修改CMakeSettings.…...

如何以CPU方式启动Stable Diffusion WebUI?
默认情况下Stable Diffusion WebUI采用GPU模式运行,但是稍微运行起来就知道至少需要4G的显存,2G显存虽然能够通过带--lowvram运行起来,但是能够炼出来的图基本都是512x512的,不能够炼大图,如果你刚好和我一样家境贫寒&…...

HTTP 框架修炼之道 | 青训营
Powered by:NEFU AB-IN 文章目录 HTTP 框架修炼之道 | 青训营 走进 HTTP 协议HTTP 框架的设计与实现应用层中间件层路由设计协议层 传输层(网络层)1. BIO(Blocking I/O):2. NIO(Non-blocking I/O):区别&…...

【活动】怎么维护电脑?
无论是学习还是工作,电脑都是IT人必不可少的重要武器,一台好电脑除了自身配置要经得起考验,后期主人对它的维护也是决定它寿命的重要因素! 其实这是个伪命题,就像穿衣一样,有的人喜欢干净整洁,…...
Linux安装Docker
文章目录 先决条件开始安装1.卸载旧版本2.安装依赖3.切换数据源4.安装Docker5.启动服务6.查看版本7.查看端口8.测试拉取镜像 同系列文章 先决条件 Linux内核版本高于3.1 开始安装 1.卸载旧版本 yum remove docker \docker-client \docker-client-latest \docker-common \doc…...

极氪汽车的云资源治理细探
作者:极氪汽车吴超 前言 2021 年,极氪 001 迅速崭露头角,仅用 110 天便创下了首款车型交付量“最快破万”的纪录。2022 年 11 月,极氪 009 在短短 76 天内便率先完成了首批交付,刷新了中国豪华纯电品牌交付速度的纪录…...

终极指南:如何在Open Interpreter中快速集成vLLM高速推理引擎
终极指南:如何在Open Interpreter中快速集成vLLM高速推理引擎 【免费下载链接】open-interpreter Open Interpreter 工具能够让大型语言模型在本地执行如Python、JavaScript、Shell等多种编程语言的代码。 项目地址: https://gitcode.com/GitHub_Trending/op/open…...

Phi-3-Mini-128K企业级应用:基于MCP协议构建安全可控的AI工具链
Phi-3-Mini-128K企业级应用:基于MCP协议构建安全可控的AI工具链 最近和几个在企业里做技术管理的朋友聊天,大家不约而同地提到了同一个烦恼:看着外面各种AI模型能力越来越强,心里痒痒的,真想引入到自己的业务流程里&a…...

基于关键链方法的遗传算法求解项目调度问题
一、问题背景与核心思想 项目调度问题(Project Scheduling Problem, PSP)是在满足活动逻辑关系(紧前约束)和资源约束(如人力、设备)的前提下,确定各活动开始/结束时间,以最小化项目工…...
在干细胞培养中的作用与应用解析【曼博生物官方代理BioLamina】)
Biolaminin 层粘连蛋白(LN521)在干细胞培养中的作用与应用解析【曼博生物官方代理BioLamina】
摘要:人类重组层粘连蛋白(Laminin),尤其是LN521亚型,在多能干细胞培养中具有重要作用。本文从细胞微环境、培养体系及应用场景角度,对其在干细胞研究与转化中的价值进行系统梳理。 关键词:LN521…...

从零到一:Vision Pro工业视觉软件安装与配置实战指南
1. Vision Pro工业视觉软件入门指南 第一次接触Vision Pro的朋友可能会被这个强大的工业视觉软件震撼到。作为康耐视的拳头产品,它在汽车制造、电子检测、包装印刷等行业应用广泛。我刚开始用的时候也是一头雾水,但跟着正确的步骤走,其实安装…...

为什么92%的候选人栽在FastAPI流式响应题上?——基于137份大厂AI后端面试记录的深度复盘
第一章:FastAPI 2.0流式响应的核心机制与演进脉络FastAPI 2.0 对流式响应(Streaming Response)进行了底层重构,将原先依赖 Starlette 的 StreamingResponse 封装升级为原生异步生成器驱动模型,并深度整合 ASGI 3.0 规范…...

Realistic Vision V5.1 虚拟摄影棚实战:利用GitHub管理自定义模型与脚本
Realistic Vision V5.1 虚拟摄影棚实战:利用GitHub管理自定义模型与脚本 你是不是也遇到过这样的烦恼?好不容易在本地电脑上,用Realistic Vision V5.1模型调出了一套完美的参数组合,生成的人像照片质感堪比专业影棚。结果换台电脑…...
)
HFSS建模进阶:如何高效使用布尔运算和局部坐标系(实战案例解析)
HFSS建模进阶:布尔运算与局部坐标系的高效实战指南 在微波器件和天线设计的数字世界里,精确的三维建模往往是成功仿真的第一步。当您已经掌握了HFSS的基础建模操作后,如何将建模效率提升到专业水平?本文将带您深入探索两个常被忽视…...

Keil5主题配色进阶:不只是好看,更要好用!详解如何区分函数、变量、宏定义的颜色
Keil5主题配色进阶:不只是好看,更要好用!详解如何区分函数、变量、宏定义的颜色 作为一名嵌入式开发者,每天面对Keil5的默认编辑器界面,你是否也感到视觉疲劳?那些单调的配色不仅影响编码心情,更…...

5G NR随机接入实战:手把手教你理解并排查MSG3发送失败的那些坑
5G NR随机接入实战:MSG3发送失败全场景排查指南 当5G终端尝试接入网络时,随机接入过程中的MSG3发送失败是最常见的"拦路虎"之一。作为网络优化的关键指标,MSG3失败直接影响用户体验和网络KPI。本文将带您深入协议栈底层,…...