STM32f103入门(7)pwm驱动led驱动舵机驱动直流电机
PWM驱动
- PWM介绍
- TIM_OC1Init 配置通道
- TIM_OCStructInit 输出比较参数默认值
- 输出比较模式 TIM_OCInitstructure
- 输出比较极性 TIM_OCInitstructure
- 设置输出使能
- 以下三个决定了PWM的频率 占空比
- 初始化通道 TIM_OC1Init(TIM2, &TIM_OCInitstructure);
- GPIO复用 PWM通道
- 驱动LED
- 复用推挽输出
- 驱动舵机
- 驱动直流电机
PWM介绍
每个定时器有四个通道,每一个通道都有一个捕获比较寄存器,
将寄存器值和计数器值比较,通过比较结果输出高低电平,实现PWM信号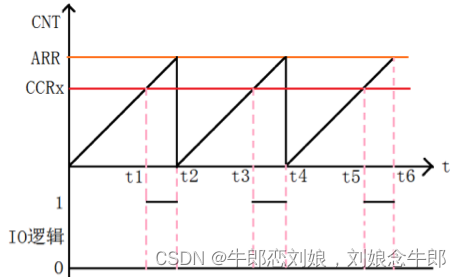
如图为向上计数:定时器重装载值为ARR,比较值CCRxt时刻对计数器值和比较值进行比较如果计数器值小于CCRx值,输出低电平如果计数器值大于CCRx值,输出高电平PWM的一个周期定时器从0开始向上计数当0-t1段,定时器计数器TIMx_CNT值小于CCRx值,输出低电平t1-t2段,定时器计数器TIMx_CNT值大于CCRx值,输出高电平当TIMx_CNT值达到ARR时,定时器溢出,重新向上计数...循环此过程至此一个PWM周期完成影响因素ARR : 决定PWM周期(在时钟频率一定的情况下,当前为默认内部时钟CK_INT)CCRx : 决定PWM占空比(高低电平所占整个周期比例)
TIM_OC1Init 配置通道
配置比较函数 一个函数配置一个单元
参数1 定时器 参数2 输出比较参数 ******
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
TIM_OCStructInit 输出比较参数默认值
输出比较参数默认值
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
用来配置强制输出模式 = 100%占空比
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
用来配置CCR寄存器预装功能
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
用来单独修改CCR寄存器值的函数(更改占空比)****
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
再补充说明一下这个函数仅高级定时器使用在使用高级定时器输出PWM时需要调用这个函数使能主输出否则PWM将不能正常输出
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
输出比较模式 TIM_OCInitstructure
TIM_OCInitstructure.TIM_OCMode = TIM_OCMode_PWM1;
1 冻结模式
2 相等时置有效电平
3 相等时置无效电平
4 相等时电平反转
5 6 pwm1 pwm2

输出比较极性 TIM_OCInitstructure
TIM_OCInitstructure.TIM_OCPolarity = ;

1高极性 极性不反转 REF波形直接输出 REF有效时 输出高电平
2 REF有效时 输出低电平
设置输出使能
TIM_OCInitstructure.TIM_OutputNState = TIM_OutputNState_Enable;
以下三个决定了PWM的频率 占空比
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //ARR in时基
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //PSC in 时基
TIM_OCInitstructure.TIM_Pulse = ; //CCR 0000~FFFF

初始化通道 TIM_OC1Init(TIM2, &TIM_OCInitstructure);
GPIO复用 PWM通道

驱动LED
复用推挽输出
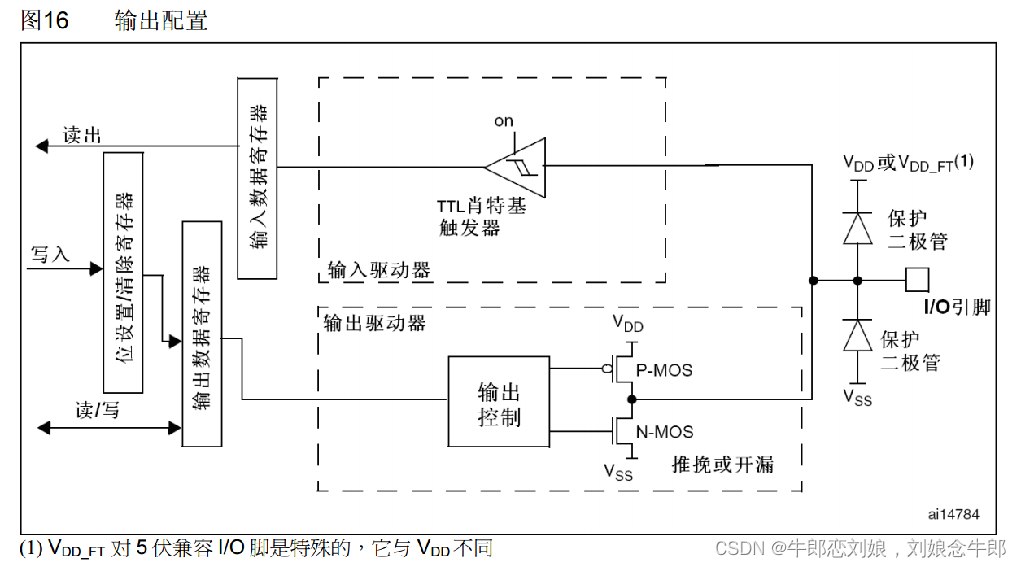
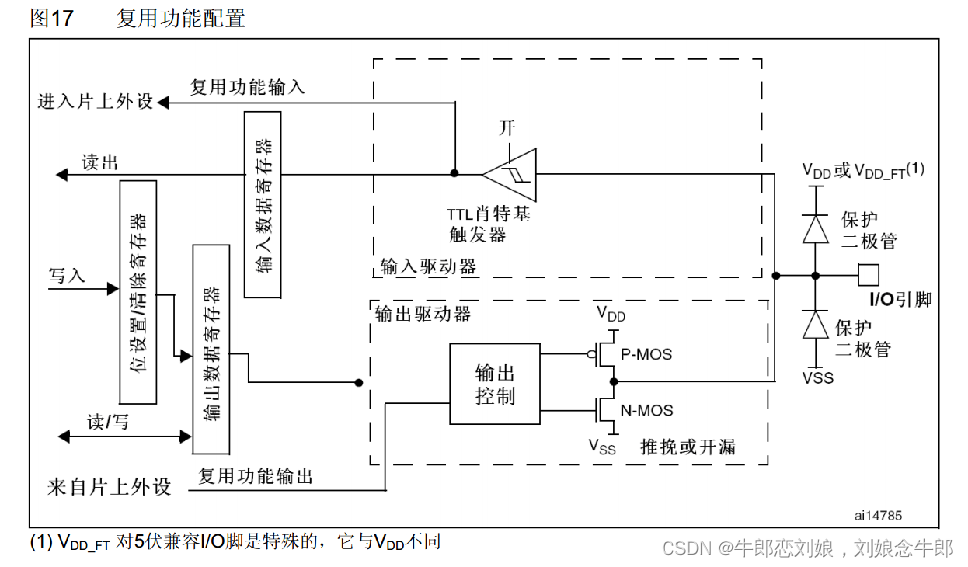
我们可以看到 pa0的控制权 由输出数据寄存器 跳转到了片上外设
所以 PA0的输出模式改为复用输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
分辨率1% 频率1k 占空比 50% 由公式可得
ARR = 100 - 1
CCR = 50
PSC = 720 - 1
后期可以调 CCR 来控制占空比
0 - 100 分别代表占空比 0 - 100 %
#include "stm32f10x.h" // Device headervoid PWM_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 控制权来自于定时器GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_InternalClockConfig(TIM2); //选择内部时钟TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //初始化时基单元TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;//配置输出比较单元TIM_OCStructInit(&TIM_OCInitStructure);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 50; //CCRTIM_OC1Init(TIM2, &TIM_OCInitStructure);TIM_Cmd(TIM2, ENABLE);//启动定时器
}void pwm_setcompare1(uint16_t Compare) //实时修改CRR 用来控制PWM占空比
{TIM_SetCompare1(TIM2, Compare);
}驱动舵机
驱动舵机不免驱动一个,多数情况下会驱动多个
那么一个定时器应该如何驱动多个舵机呢
我们可以开通多个通道


占空比要求一般 0.5ms - 2.5 ms
ARR+1 = 20k
PSC + 1 = 72
CRR = 500 -2500
这里通道设置为2 GPIOA pin2
初始化代码基本不变
main如下
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "sevo.h"uint16_t i;
float angle=0;
int main(void)
{OLED_Init();//Apin 14 15sevo_init();//TIM2 ͨµÀ2 PA1while (1){if(angle>180) angle=0;sevoangle(angle);OLED_ShowNum(1,1,angle,3);//angle+=30;Delay_ms(1000);}
}
sevo.c如下
#include "stm32f10x.h" // Device header#include "pwm.h"void sevo_init(void){PWM_Init();
}
void sevoangle(float angle){angle=angle/180 * 2000 + 500;TIM_SetCompare2(TIM2, angle);
}实现了1s钟 舵机旋转30度
舵机接口
1. 5V电压
2. PWM通道2 这里接PA1 TIM2 通道 2
3. GND
驱动直流电机

频率越快 蜂鸣器杂音越小 20kHZ psc=32 预分频器= 32
72M / 32 = 20KHZ
CCR = -100 ~ +100 反转 和 正转
由于设备不齐全 只能理论以下了
VM 5v
VCC 3.3v
GND
AO1 正极
AO2 负极
PWMA 接A2 使用的TIM2 通道3
AIN2 GPIO A5
AIN1 GPIO A4
正传 A4=1 A5=0
反转 相反
STBY 3.3vCCR用来控制速度0-100但我们输入参数的时候是-100 ~ +100 这是因为我们要区分正传还是反转如果为负数 我们就A4=0 A5=1 反之 相反如果为负值 我们需要取绝对值 否则CCR会错误
留个作业
旋转编码器来控制舵机 留在这
相关文章:
STM32f103入门(7)pwm驱动led驱动舵机驱动直流电机
PWM驱动 PWM介绍TIM_OC1Init 配置通道TIM_OCStructInit 输出比较参数默认值输出比较模式 TIM_OCInitstructure输出比较极性 TIM_OCInitstructure设置输出使能以下三个决定了PWM的频率 占空比初始化通道 TIM_OC1Init(TIM2, &TIM_OCInitstructure);GPIO复用 PWM通道 驱动LED复…...
Linux centos7 bash编程——-求质数和
训练项目:使用函数求质数和。 定义一个函数IsPrime(),据此判断一个数是否为质数 由用户输入一个整数,求出比此数大的两个最小质数之和。 一、解决思路: 1.先在键盘上输入一个整数 2.求出比此数大的最小质数 3.再求出比此质数大的另一个…...

给Hexo添加说说功能
首发博客地址 官网地址 效果 👀 前言 GitHub 仓库:Artitalk.js 🎉 特性 增删查改全方面支持 支持针对每条说说的评论 支持 Markdown/html 语法 支持图片上传 🚀 快速使用 下列主题已将本项目整合进去,可以直接使用。 感…...

Tensorflow调用训练好的yolov5模型进行推理
文章目录 1、安装TensorFlow-GPU版本1.2、验证是否安装正常 2、将训练好的pt文件转换成onnx文件2.2、什么是Onnx模型和Tensorflow模型2.1、将onnx文件转换成pb文件 1、安装TensorFlow-GPU版本 1、创建虚拟环境python3.8 conda create -n TF2.4 python3.82、进入虚拟环境 conda…...

【场景方案】我所积累的一些跨页面的数据传递方式,持续更新,欢迎补充~
文章目录 Iframe内嵌相互传递BroadcastChannel同标签页数据传递localStorage中间人传递未完待续... Iframe内嵌相互传递 使用window.postMessage()的这个html5特性去跨域传递数据,不受跨域限制。 父层: sendMes(){ // 向iframe发送let iframdom this…...

ASP.NET Core 的错误页面
异常处理 Developer 环境的异常页面 ASP.NET Core App 会可以在开发阶段用UseDeveloperExceptionPage启用 Developer 异常页面: app.UseDeveloperExceptionPage();当遇到Unhandled 异常信息时,可以输出异常信息页面: 异常信息包括…...

Android静态ip设置的坑
Android静态ip设置的坑 Android静态ip设置,对于这个功能,如果没有接触过,会给人感觉是个特别简单的功能,直接调用系统的接口即可,其实这个功能还是有许多坑的,因为谷歌在Android SDK中对相关的API进行非系…...

电源管理(PMIC)TPS63070RNMR、TPS650942A0RSKR、LM5175RHFR器件介绍、应用及特点。
一、TPS63070RNMR,降压升压 开关稳压器 IC 正 可调式 2.5V 1 输出 3.6A(开关) 15-PowerVFQFN 1、概述 TPS63070高输入电压降压-升压转换器是一款高效的低静态电流降压-升压转换器。这些器件适用于输入电压高于或低于输出电压的应用。升压模式…...

k8s(kubernetes)介绍篇
一、Kubernetes 是什么 Kubernetes 是一个全新的基于容器技术的分布式架构解决方案,是 Google 开源的一个容器集群管理系统,Kubernetes 简称 K8S。 Kubernetes 是一个一站式的完备的分布式系统开发和支撑平台,更是一个开放平台,对…...
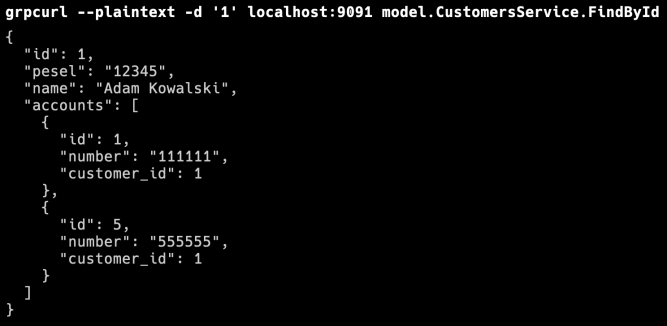
gRPC + Spring Boot 编程教程 - piot
在本文中,您将学习如何实现通过 gRPC 通信的 Spring Boot 应用程序。gRPC 是一个现代开源远程过程调用 (RPC) 框架,可以在任何环境中运行。默认情况下,它使用 Google 的 Protocol Buffer 来序列化和反序列化结构化数据。当然,我们…...

新建Spring Boot项目
使用IDEA 来创建: 文件-新建-项目 填写项目元数据 选择依赖项 此处可以先选 web-spring web 关于这些依赖项,更多可参考: IDEA创建Spring boot项目时各依赖的说明(Developer Tools篇)[1] 项目结构介绍 展开项目,此时…...

Python数据分析的第三方库
ython作为一种简单易学、功能强大的编程语言,逐渐成为数据分析领域的首选工具。在Python数据分析中,有许多优秀的第三方库可以帮助我们进行数据处理、可视化和建模。 常用第三方库: NumPy:提供了高性能的多维数组对象和用于数组…...
,排除参数为空的条件)
EF列表分页查询(单表、多表),排除参数为空的条件
在日常使用EF框架查询数据库时,有时传入的参数为空,那么我们应该把该条件排除,不应列入组装的sql中,本篇文件以分页查询为例介绍EF框架的单表、多表的多条件查询,参数为空时排除条件。 首先我们要有派生自DBContext类的数据上下文…...

VisualStudio配置pybind11-Python调用C++方法
个人测试下来Debug生成的dll改pyd,py中import会报错gilstate->autoInterpreterState 如果遇到同样问题使用Release吧 目录 1.安装pybind11 1.pip: 2.github: 2.配置VS工程 2.在VC目录中的包含目录添加: 3.在VC目录中的库目录…...

ZZULIOJ 1164: 字符串加密,Java
ZZULIOJ 1164: 字符串加密,Java 题目描述 输入一串字符(长度不超过100)和一个正整数k,将其中的英文字母加密并输出加密后的字符串,非英文字母不变。加密思想:将每个字母c加一个序数k,即用它后…...

联合体(共用体)的简单介绍
目录 概念: 联合的声明: 类比结构体: 联合体的大小: 联合的⼤⼩⾄少是最⼤成员的⼤⼩ 联合体的空间是共用的 联合体内部成员的赋值: 当最⼤成员⼤⼩不是最⼤对⻬数的整数倍的时候,就要对⻬到最⼤对⻬…...
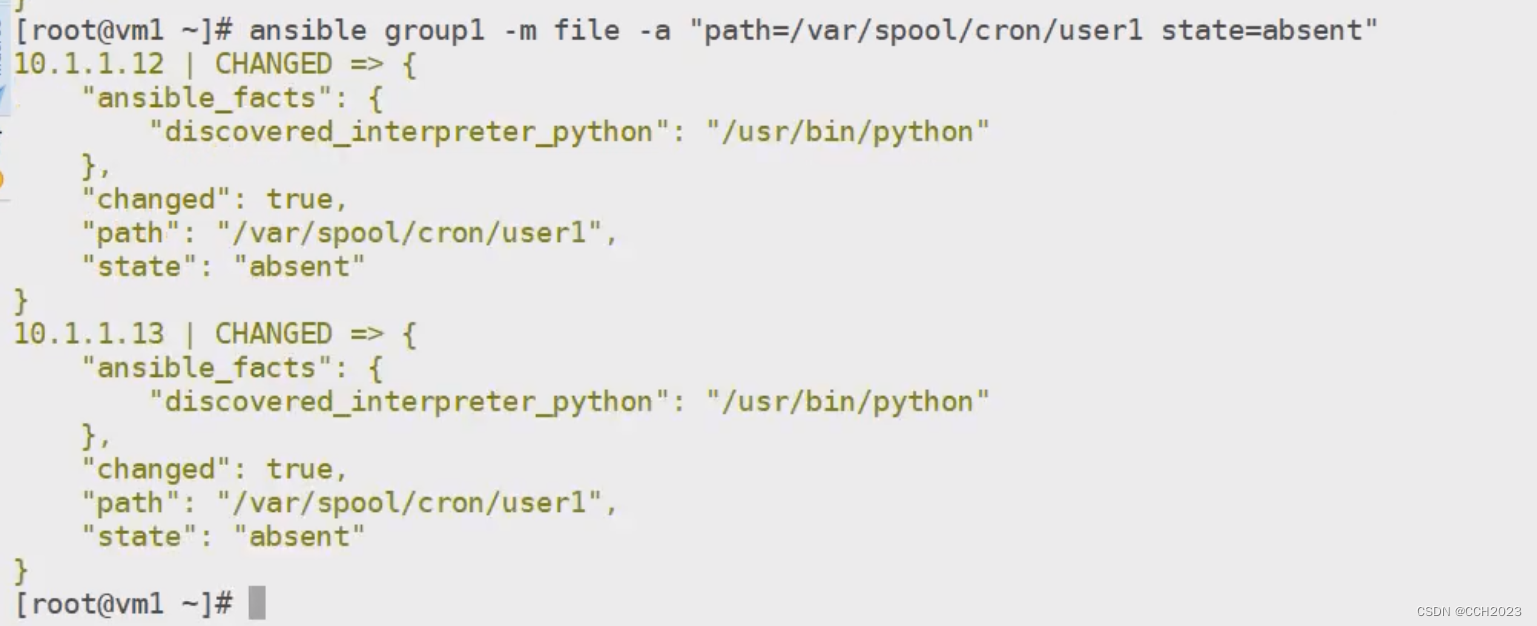
Ansible学习笔记8
group模块: 创建一个group组: [rootlocalhost ~]# ansible group1 -m group -a "nameaaa gid5000" 192.168.17.105 | CHANGED > {"ansible_facts": {"discovered_interpreter_python": "/usr/bin/python"}…...

五子棋游戏禁手算法的改进
五子棋游戏禁手算法的改进 五子棋最新的禁手规则: 1.黑棋禁手判负、白棋无禁手。黑棋禁手有“三三”(包括“四三三”)、“四四”(包括“四四三”)和“长连”。黑棋只能以“四三”取胜。 2.黑方…...
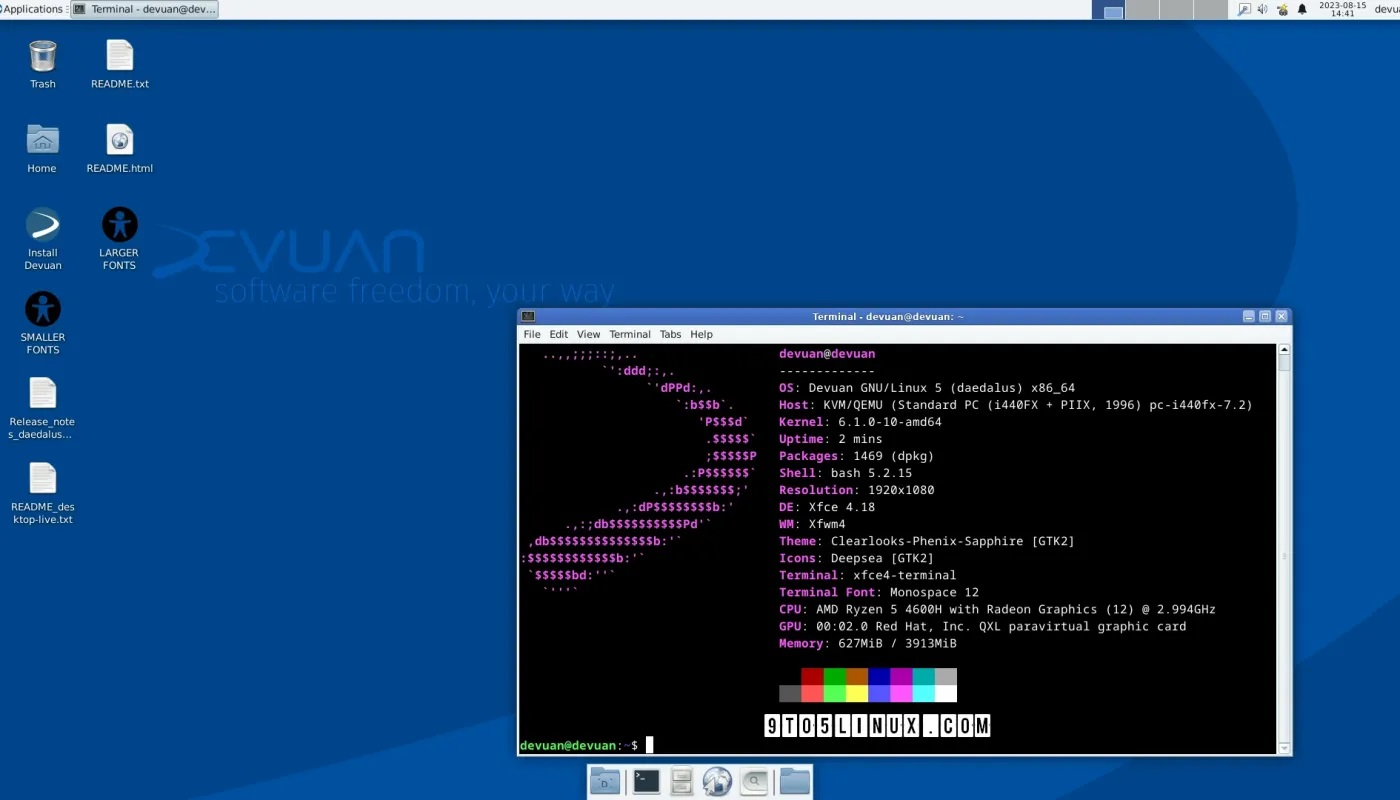
基于 Debian 12 的 Devuan GNU+Linux 5 为软件自由爱好者而生
导读Devuan 开发人员宣布发布 Devuan GNULinux 5.0 “代达罗斯 “发行版,它是 Debian GNU/Linux 操作系统的 100% 衍生版本,不包含 systemd 和相关组件。 Devuan GNULinux 5 基于最新的 Debian GNU/Linux 12 “书虫 “操作系统系列,采用长期支…...

算法系列-力扣234-回文链表判定
回文链表判定 给你一个单链表的头节点 head ,请你判断该链表是否为回文链表。如果是,返回 true ;否则,返回 false 。 方法一:栈反转对比法 解题思路:找到中间节点后用栈辅助反转对比 解题方法࿱…...

Playwright Python3.7+安装失败根因与一次成功配置指南
1. 为什么Playwright在Python3.7环境下总“装不上”?——这不是你的pip问题,是环境认知偏差 你刚在新配的Mac M2上敲下 pip install playwright ,终端卡在 Building wheel for playwright... 十分钟不动;或者Windows上反复提示…...

Firefox渗透测试插件工作流:15款高价值安全工具实战指南
1. 这不是普通浏览器插件推荐,而是一套可落地的渗透测试辅助工作流 “火狐插件”四个字在安全从业者耳中,常被默认为“轻量级、临时性、辅助性”的代名词——很多人装完Hackbar就以为自己有了渗透入口,点开FoxyProxy调个代理就当完成了环境隔…...

Unity版本降级实战:跨版本兼容性修复指南
1. 为什么Unity版本降级不是“回退按钮”,而是一场精密手术 在Unity项目开发中,很多人把版本降级想象成操作系统里的“系统还原”——点一下,回到上个稳定状态,万事大吉。我去年接手一个AR工业巡检项目时也这么想,客户…...

恩智浦eIQ Time Series Studio:嵌入式时间序列AI从数据到部署的自动化实践
1. 项目概述与核心价值如果你正在为嵌入式设备开发一个基于传感器数据的智能功能,比如通过振动信号判断电机是否故障,或者通过电流波形识别家电的工作模式,你大概率会面临一个经典困境:算法模型在PC上跑得好好的,一到资…...

如何永久保存微信聊天记录?5分钟掌握免费开源工具WeChatMsg
如何永久保存微信聊天记录?5分钟掌握免费开源工具WeChatMsg 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/…...

CANN Rotary Embedding 融合算子:解锁千问大模型推理性能的 3 倍密钥
CANN Rotary Embedding 融合算子:解锁千问大模型推理性能的 3 倍密钥 导语:在大模型推理的“微操”中,位置编码(Positional Encoding)往往被视为理所当然的开销。然而,在昇腾(Ascend࿰…...

终极指南:3分钟在Windows上安装苹果USB驱动和iPhone网络共享
终极指南:3分钟在Windows上安装苹果USB驱动和iPhone网络共享 【免费下载链接】Apple-Mobile-Drivers-Installer Powershell script to easily install Apple USB and Mobile Device Ethernet (USB Tethering) drivers on Windows! 项目地址: https://gitcode.com/…...

5分钟快速获取微信数据库密钥:Sharp-dumpkey完整使用指南
5分钟快速获取微信数据库密钥:Sharp-dumpkey完整使用指南 【免费下载链接】Sharp-dumpkey 基于C#实现的获取微信数据库密钥的小工具 项目地址: https://gitcode.com/gh_mirrors/sh/Sharp-dumpkey 你是否曾因为无法访问自己的微信聊天记录而感到困扰ÿ…...

Godot原生强化学习集成:零Python实现AI训练与部署
1. 这不是又一个“Hello World”式教程:为什么GodotRL的组合值得你花10分钟认真看我第一次在Godot Asset Library里点开那个标着“Reinforcement Learning Agent”的插件时,心里是带着怀疑的——毕竟过去三年里,我试过七种不同方式把强化学习…...

Navicat Premium试用期重置终极指南:三步恢复完整14天试用
Navicat Premium试用期重置终极指南:三步恢复完整14天试用 【免费下载链接】navicat-premium-reset-trial Reset macOS Navicat Premium 15/16/17 app remaining trial days 项目地址: https://gitcode.com/gh_mirrors/na/navicat-premium-reset-trial 你是否…...