普通平衡树 Splay
Splay 简介
Splay(伸展树),又叫做分裂树,是一种自调整形式的二叉查找树,满足二叉查找树的性质:一个节点左子树的所有节点的权值,均小于这个节点的权值。且其右子树所有节点的权值,均大于这个节点的权值。
因此Splay的中序遍历是一个递增序列。
Splay可以用来维护实链剖分(LCT)等,作为普通平衡树,它的优势在于不需要记录用于平衡树的冗余信息。
Splay维护一个有序集合,支持如下操作:
- 向集合中添加一个数
- 删除集合中的一个数
- 求出一个数的排名
- 根据排名求出这个数
- 查找一个数的前驱
- 查找一个数的后继
Splay原理以及实现
模板题
约定
为了代码简洁以及安全,我们用数组模拟Splay,并且做出规定如下性质:
- 安全性:不在Splay上的节点,以及被删除的节点,其所有信息应该被清空。
- 保证:我们保证函数不可能被非法调用,或者所有可能的非法调用是无害的,因此不需要在被调用的函数内部进行特判。
例如:我们保证get(u)中,u一定有父亲。
例如:push_up(0)是无害的。 - 代码重用:我们尽可能的保证代码重用
- 节点从
1开始编号,0号节点可能有多余的子孙/后代信息,但是其val,cnt,siz信息始终为0。
或许每一个约定都并不是完全必要的。
节点:node
Splay上的一个节点(node)维护这样几个信息:
fa:这个节点的父亲编号,fa=0表示没有父亲ch[0]:节点的左儿子编号,ch[0]的别名是l,若l=0表示没有左儿子ch[1]:节点的右儿子编号,ch[1]的别名是r,若r=0表示没有右儿子val:节点的权值cnt:节点权值在集合中出现的次数siz:以此节点为根的子树的大小- 成员函数
set(v,c,s):用来初始化节点信息,使得val=v,cnt=c,siz=s,并且让fa=l=r=0。其中c和s的默认值为1
const int N=2e6;
struct node {int fa,ch[2],val,cnt,siz;int&l=ch[0],&r=ch[1];void set(int v,int c=1,int s=1) {fa=l=r=0;val=v;cnt=c;siz=s;}
} t[N+5];
int tot,root;
左右儿子函数(get)
函数原型:
bool get(int);
函数get(u)返回编号为u的节点是其父亲的左儿子(返回0)或者右儿子(返回1),保证传入的参数u一定有父亲。
函数定义:
bool get(int u) {return t[t[u].fa].r==u;
}
上传(push_up)
函数原型:
void push_up(int);
函数push_up(u)将编号为u节点用自己的两个儿子的信息更新自己的siz信息。当有儿子编号为0时不影响,因为我们保证0号节点的siz信息为0。
函数定义:
void push_up(int u) {t[u].siz=t[t[u].l].siz+t[t[u].r].siz+t[u].cnt;
}
事实上push_up(0)也不影响0节点的siz,因为调用push_up(0)仅在pop函数中root=0时,但此时由于早已del了0节点的左右儿子,因此0节点必然没有左右儿子的信息。
加入节点(add)
函数原型:
void add(int,int,bool);
函数add(fa,son,k)将编号为son的节点加入Splay,并且它是父亲fa的k侧儿子。
函数定义:
void add(int fa,int son,bool k) {t[t[son].fa=fa].ch[k]=son;
}
删除节点(del)
函数原型:
void del(int);
函数del(u)将编号为u的节点从Splay中删除,这需要操作它的父亲和左右儿子,并且将它的三个权值(val,cnt,siz)清空。
函数定义:
void del(int u) {t[t[u].l].fa=t[t[u].r].fa=t[t[u].fa].ch[get(u)]=0;t[u].set(0,0,0);
}
旋转(rotate)
Splay的单次操作复杂度并不是严格 O ( log n ) O(\log n) O(logn)的,但是Splay依靠其伸展操作(splay)使得总复杂度为均摊 O ( n log n ) O(n\log n) O(nlogn)(而不是期望 O ( n log n ) O(n\log n) O(nlogn))的。
在伸展树上的一般操作都基于伸展操作:假设想要对一个二叉查找树执行一系列的查找操作,为了使整个查找时间更小,被查频率高的那些条目就应当经常处于靠近树根的位置。于是想到设计一个简单方法, 在每次查找之后对树进行重构,把被查找的条目搬移到离树根近一些的地方。伸展树应运而生。伸展树是一种自调整形式的二叉查找树,它会沿着从某个节点到树根之间的路径,通过一系列的旋转把这个节点搬移到树根去。
函数原型
void rotate(int);
当树是完全二叉树时,单次查询复杂度为 O ( log n ) O(\log n) O(logn)
当树是一条链时,单次查询复杂度为 O ( n ) O(n) O(n)
rotate通过改变树的形态,达到使得Splay的均摊复杂度为 O ( log n ) O(\log n) O(logn)的目的。
函数rotate(u)将编号为u的节点旋转一次。
旋转原理
首先我们需要记录一个变量k:
k=get(u)
这表明了编号为u的节点是其父亲的哪侧儿子,k=0表示左儿子,k=1表示右儿子。
旋转过程需要保存几个节点编号:
u:当前节点fa:当且节点的父亲son:节点t[u]的异侧儿子,即son=t[u].ch[k^1]。例如:如果t[u]是t[fa]的左儿子,那么t[son]就是t[u]的右儿子。ffa:当前节点的父亲的父亲。
画出一个图来示意一下:
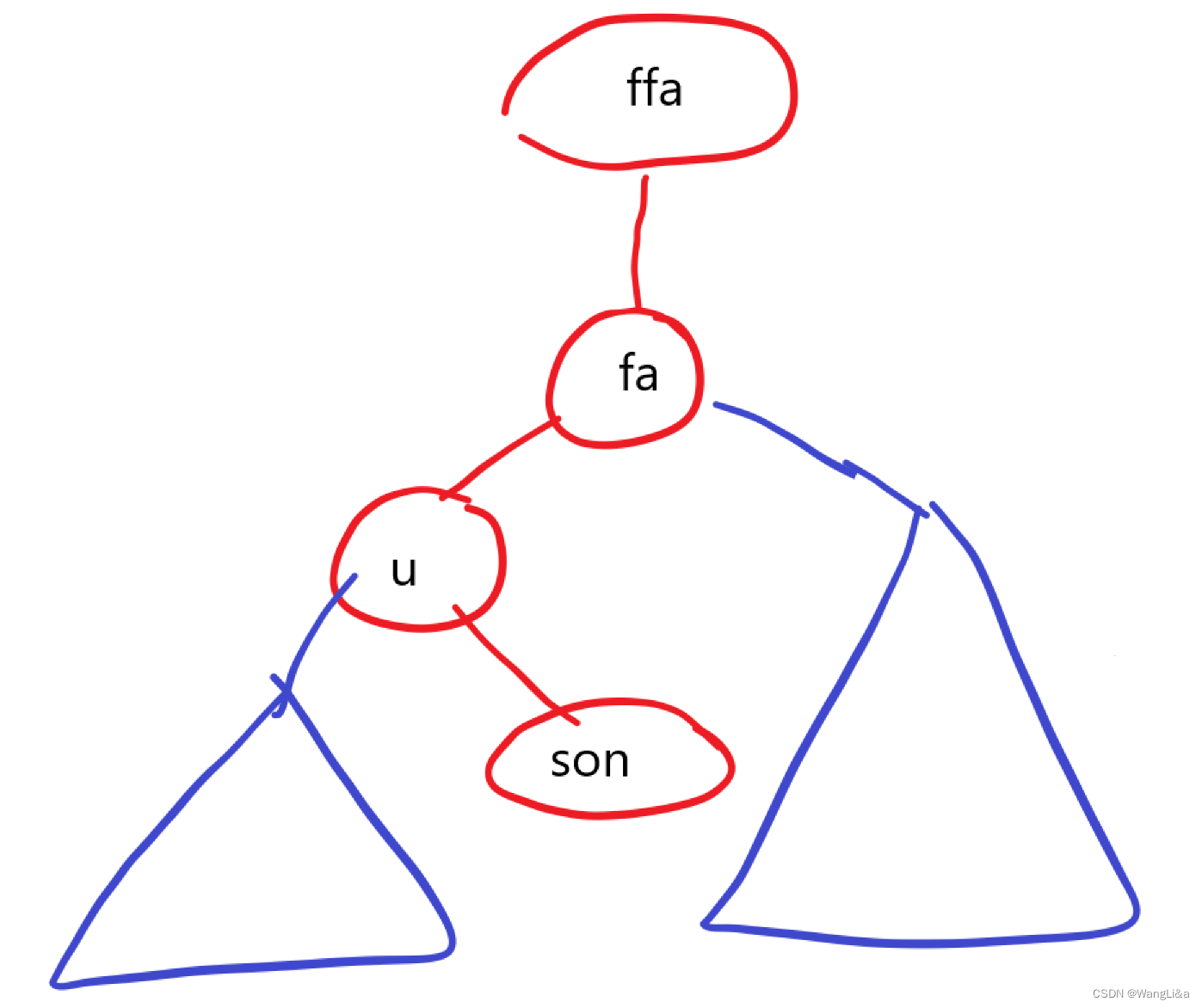
在这里,t[fa]是t[ffa]的哪侧儿子无关紧要。
接下来我们修改树的形态,完成三步操作:
- 用
u顶替掉原来fa的位置: 把u设置为ffa的儿子,fa是哪侧儿子,u就是哪侧儿子。 - 用
fa顶替掉原来son的位置:fa变成u的k^1儿子 - 把
son设为fa的同侧儿子,替代u:son变成fa的k儿子
还是看代码比较好懂:
int k=get(u),son=t[u].ch[k^1],fa=t[u].fa,ffa=t[fa].fa;
add(ffa,u,get(fa));
add(u,fa,k^1);
add(fa,son,k);
画个图:
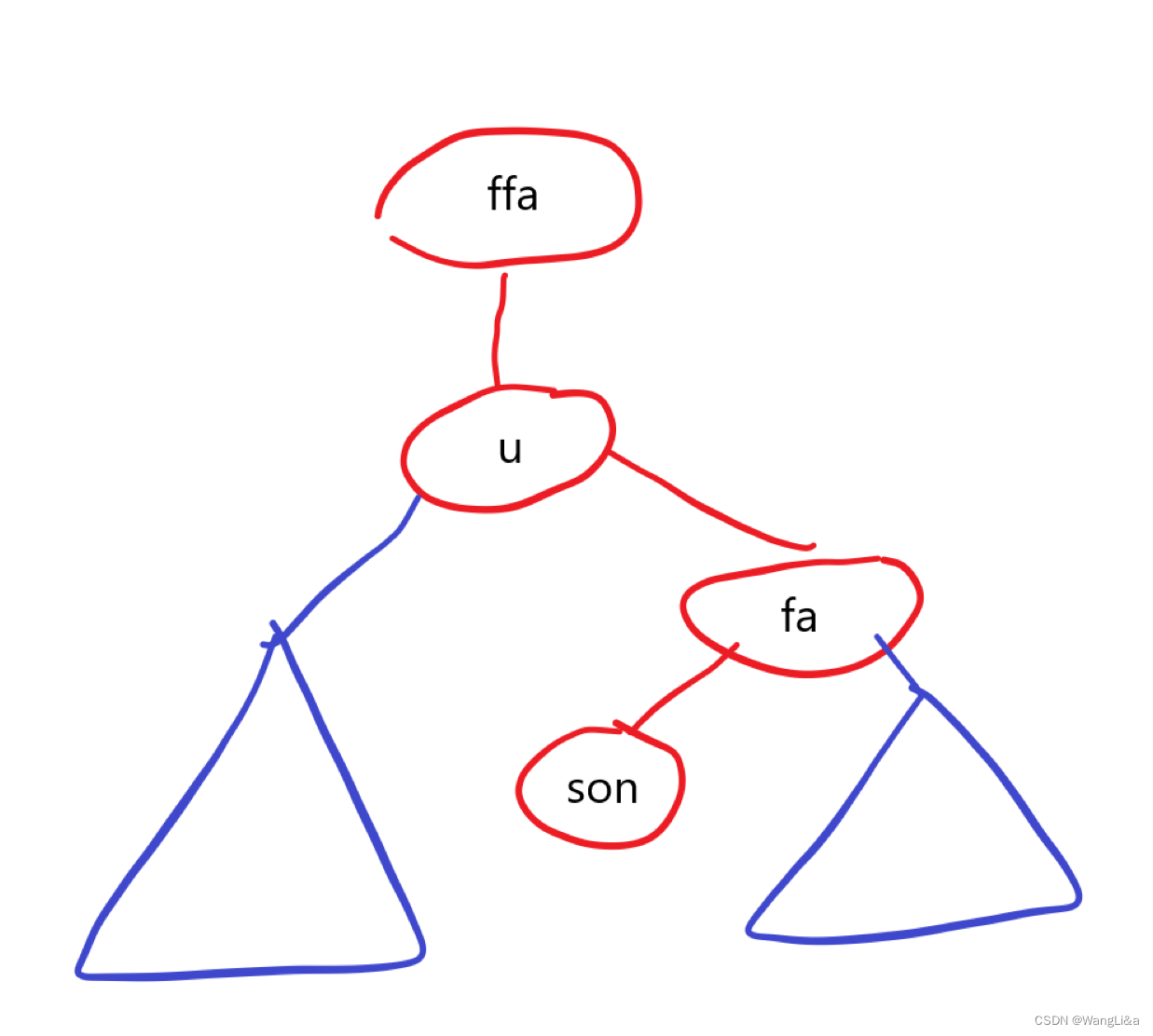
直接背下来写得比较快。
旋转实现
完整代码是这样的:
void rotate(int u) {int k=get(u),son=t[u].ch[k^1],fa=t[u].fa,ffa=t[fa].fa;add(ffa,u,get(fa));add(u,fa,k^1);add(fa,son,k);push_up(fa);push_up(u);
}
注意最后要更新节点信息。先push_up父亲,再push_up自身,因为此时,原来的父亲是自身的儿子。
保证编号为u的节点存在父亲。
(事实上,可能会有son=0或ffa=0,使得编号为0的节点可能携带有额外的祖先/后代信息,但是这不影响。)
其实我们还可以选择把子孙转成指定祖先的儿子处就停止,这里不多说了。
伸展(splay)
函数原型:
int splay(int);
伸展操作是执行若干次旋转操作,把编号为u的节点旋转到根,并返回u的编号。
执行的方法是这样的:
记录当且节点的编号u,更新它目前的父亲编号fa=t[u].fa,注意u的父亲是不断变化的,因此要更新:
- 如果
u没有父亲,说明u是根节点:停止 - 如果
fa不存在父亲,说明u再旋转一次就会旋转到根:rotete(u) get(fa)==get(u),说明u和fa是同侧儿子,先旋转fa,再旋转u:rotate(fa),rotate(u)get(fa)!=get(u),说明u和fa是异侧儿子,旋转两次u:rotate(u),rotate(u)
写成代码是这样的:
int splay(int u) {for(int fa; (fa=t[u].fa); rotate(u))if(t[fa].fa)rotate(get(u)==get(fa)?fa:u);return root=u;
}
注意最后把根节点编号设为u。
伸展主要有三个作用:
- 可以保证时间复杂度
rotate内有push_up函数,如果修改了u的信息,伸展一下可以更新到根节点的链上信息- 把
u旋转到根便于下一步操作
加入值(push)
函数原型:
int push(int);
函数push(val)将val在集合中出现的次数增加1,并返回val所在的节点编号,如果val在集合中原来并不存在,就创建一个新节点。
函数分为三种情况讨论:
- Splay为空:直接新建一个节点,然后把根设为这个节点。
- Splay中以前存在
val这个值:找到存储这个值的节点,先把它旋转到根,然后把它的cnt增加1,再push_up以更新信息。
(因为此时这个节点已经是根了,对它调用splay不会rotate,因此必须手动psuh_up。
即使我们先前不把这个节点旋转到根,但是这个节点可能原本就是根,还是需要更新一下siz信息) - Splay中不存在
val这个值:找到一个合适的叶子节点,然后对val新建一个节点,并且把新节点的父亲设为这个叶子节点。把这个节点旋转到根。
为了保证时间复杂度,同时为了更新链上记录的siz信息,最后都要把val所在的节点旋转到根。
函数定义:
int push(int val) {if(!root) {t[++tot].set(val);return root=tot;}int x=val_find(val);这里的val_find函数很特殊,如果找到val,会返回这个节点作为根节点,否则会返回一个可以作为新节点父亲的叶子节点if(t[x].val==val) {t[x].cnt++;push_up(x);return x;}t[++tot].set(val);要先set再加边,否则set会将t[tot]上存储的祖先/子孙信息清除add(x,tot,t[x].val<val);return splay(tot);
}
删去值(pop)
函数原型:
void pop(int);
函数pop(val)将集合中val出现的次数减1,保证val之前至少出现过一次。
函数分几种情况讨论:
首先找到val所在的节点的编号,设为u,然后把这个节点旋转到根。
- 如果
t[u].cnt>1:直接让cnt-- - 如果
u至少没有一个儿子,那就把根设为它的另一个儿子,然后删除u。
(如果u没有任何一个儿子是不影响的。) - 否则,说明
u既有左儿子,又有右儿子,也就是说val既有前驱又有后继:
因此找到val的前驱,把前驱旋转到根,此时u一定是根的右儿子,而且由于根是前驱,所以u没有左儿子,因此直接把u的右儿子设为根的右儿子,然后删除u即可。
注意最后要push_up(root),因为第1,3种情况下需要更新根节点信息。
函数实现:
void pop(int val) {int u=val_find(val);if(t[u].cnt>1) t[u].cnt--;else if(!t[u].l||!t[u].r) root=t[u].l|t[u].r,del(u);else {pre(val);int r=t[u].r;del(u);这里要先清除u,再连边。否则清除u时会顺便擦除根节点和r节点的祖先关系信息add(root,r,1);此时前驱是根节点,把u的右儿子设为其前驱的右儿子}push_up(root);
}
用值查找(val_find)
函数原型:
int val_find(int);
函数val_find(val)在集合中查找值val,如果它出现过,那就把val所在的节点旋转到根,并且返回它的编号,如果它没有出现过,那就返回一个可以作为val父亲的叶子节点编号。
(如果此时树为空,函数会返回0,尽管不会出现这样的调用)
主要做法就是从根节点开始找,如果找到了就返回,没找到就按照大小关系继续往下走。
如果找到叶子节点还没找到val就返回它的父亲。
函数定义:
int val_find(int val) {int u=root,fa=0;while(u)if(t[fa=u].val==val) return splay(u);else u=t[u].ch[t[u].val<val];return fa;
}
用排名查找(rank_find)
函数原型:
int rank_find(int,int);
函数rank_find(u,rank)查找u子树内排名为rank的节点,并返回节点编号。注意这里是子树内排名,而不是全局排名。
我们通常调用时参数u=root,即查询全局排名。
把rank_find函数设计为两个参数,一方面是为了方便递归调用,另一方面,不为其提供一个参数的重载版本是为了防止将其与val_find函数与find_rank函数混淆。
rank_find(u,rank)函数这样设计:
分情况讨论:
- 如果
rank<=左子树大小,递归到左儿子:rank_find(t[u].l,rank) - 否则,如果
rank>左子树大小+自身节点的cnt,递归到右儿子:rank_find(t[u].r,rank-t[t[u].l].siz-t[u].cnt) - 否则:旋转并且返回自身节点编号
这种独特的递归顺序使得如果查询的rank大于子树之内的最大排名,会返回子树最大值的节点编号,避免了进一部的分情况讨论。
函数定义:
int rank_find(int u,int rank) {int l=t[t[u].l].siz;这样可以少打很多字if(rank<=l) return rank_find(t[u].l,rank);else if(rank>l+t[u].cnt) return rank_find(t[u].r,rank-l-t[u].cnt);return splay(u);
}
查询值的排名(find_rank)
函数原型:
int find_rank(int);
函数find_rank(val)查询值val的排名,不保证val出现过。
没有提供查询节点排名的函数是因为节点不存在排名,如果想要查询节点u对应的权值的排名,可以调用find_rank(t[u].val)。
查询val的排名,可以通过把val加入集合一次,然后把它对应的节点旋转到根。那么val的排名就是它对应节点的左子树的大小+1。
然后再把val在集合中删去一次。
函数定义:
int find_rank(int val) {int ans=t[t[push(val)].l].siz+1;pop(val);return ans;
}
查找前驱/后继(bound)
函数原型:
int bound(int,bool);
函数bound(val,k)用于查询前驱/后继,旋转节点到根,并返回对应的节点编号。
函数bound(val,0)用于查询值val的前驱。
函数bound(val,1)用于查询值val的后继。
bound原理
这里以查询前驱举例:
查询val前驱的方法就是,无论Splay中是否存在val,我们都先push(val),这样Splay内肯定存在val,且为Splay的根。
走到根的左儿子上,然后不断地走右儿子,直到走到叶子节点即为前驱,记录答案后pop(val)。
查询后继的方法是类似的:先push(val),走到根的右儿子上,然后不断地走左儿子,叶子节点即为前驱,记录答案后pop(val)。
注意到可以把这两种情况合并起来:设k=0表示查询前驱,k=1表示查询后继,则函数定义如下:
int bound(int val,bool k) {int u=t[push(val)].ch[k];while(t[u].ch[k^1]) u=t[u].ch[k^1];pop(val);return splay(u);
}
前驱(pre)
函数原型:
int pre(int);
pre为查询前驱提供了专门的接口。
函数pre(val)表示查询val的前驱,把前驱旋转到根,并且返回前驱编号。
val可以比集合中的任何数都要大,但是不能没有前驱,否则运行可能出现问题,我们没有保证splay(0)不会出错,因为我们没有保证t[0]不携带非零的祖先后代信息。
如果非要这样查询可能没有前驱/后继的数的话可以设置哨兵:push(-INF),push(INF)
函数定义:
int pre(int val) {return bound(val,0);
}
后继(nxt)
函数原型:
int nxt(int);
函数nxt(val)表示查询val的后继,把后继旋转到根,并返回后继编号。
必须要保证val有后继。
函数定义:
int nxt(int val) {return bound(val,1);
}
完整代码
空间复杂度
注意到Splay的任意一种操作至多创建一个节点,因此空间复杂度为一倍操作次数。(本题要算上一开始的 1 0 5 10^5 105次操作)
代码
#include<iostream>
using namespace std;
const int N=2e6;
struct node {int fa,ch[2];int val,cnt,siz;int &l=ch[0],&r=ch[1];void set(int v,int c=1,int s=1) {l=r=fa;val=v;cnt=c;siz=s;}
}t[1100005];
int tot,root;
bool get(int);
void push_up(int);
void add(int,int,bool);
void del(int);
void rotate(int);
int splay(int);
int push(int);
void pop(int);
int val_find(int);
int rank_find(int,int);
int find_rank(int);
int bound(int,bool);
int pre(int);
int nxt(int);
int a[N+5];
int main() {int n,m;cin>>n>>m;for(int i=1;i<=n;i++) cin>>a[i];for(int i=1;i<=n;i++) push(a[i]);int ans=0,last=0;while(m--) {int op,x;cin>>op>>x;
// if(op==1) push(x);
// if(op==2) pop(x);
// if(op==3) cout<<find_rank(x)<<endl;
// if(op==4) cout<<t[rank_find(root,x)].val<<endl;
// if(op==5) cout<<t[pre(x)].val<<endl;
// if(op==6) cout<<t[nxt(x)].val<<endl;x^=last;if(op==1) push(x);if(op==2) pop(x);if(op==3) ans^=(last=find_rank(x));if(op==4) ans^=(last=t[rank_find(root,x)].val);if(op==5) ans^=(last=t[pre(x)].val);if(op==6) ans^=(last=t[nxt(x)].val);}cout<<ans;
}
bool get(int u) {return t[t[u].fa].r==u;
}
void push_up(int u) {t[u].siz=t[t[u].l].siz+t[t[u].r].siz+t[u].cnt;
}
void add(int fa,int son,bool k) {t[t[son].fa=fa].ch[k]=son;
}
void del(int u) {t[t[u].l].fa=t[t[u].r].fa=t[t[u].fa].ch[get(u)]=0;t[u].set(0,0,0);
}
void rotate(int u) {int k=get(u),son=t[u].ch[k^1],fa=t[u].fa,ffa=t[fa].fa;add(ffa,u,get(fa));add(u,fa,k^1);add(fa,son,k);push_up(fa);push_up(u);
}
int splay(int u) {for(int fa;(fa=t[u].fa);rotate(u)) if(t[fa].fa)rotate(get(fa)==get(u)?fa:u);return root=u;
}
int push(int val) {if(!root) {t[++tot].set(val);return root=tot;}int x=val_find(val) ;if(t[x].val==val) {t[x].cnt++;push_up(x);return x;}t[++tot].set(val);add(x,tot,t[x].val<val);return splay(tot);
}
void pop(int val) {int u=val_find(val);if(t[u].cnt>1) t[u].cnt--;else if(!t[u].l||!t[u].r) root=t[u].l|t[u].r,del(u);else {pre(val);int r=t[u].r;del(u);add(root,r,1);}push_up(root);
}
int val_find(int val) {int u=root,fa=0;while(u) if(t[fa=u].val==val) return splay(u);else u=t[u].ch[t[u].val<val];return fa;
}
int rank_find(int u,int rank) {int l=t[t[u].l].siz;if(rank<=l) return rank_find(t[u].l,rank);else if(rank>t[u].cnt+l) return rank_find(t[u].r,rank-t[u].cnt-l);return splay(u);
}
int find_rank(int val) {int ans=t[t[push(val)].l].siz+1;pop(val);return ans;
}
int bound(int val,bool k) {int u=t[push(val)].ch[k];while(t[u].ch[k^1]) u=t[u].ch[k^1];pop(val);return splay(u);
}
int pre(int val) {return bound(val,0);
}
int nxt(int val) {return bound(val,1);
}
后话
关于pop和pre
有一种观点认为,对pre函数查询不在集合里面的val会导致创建新节点,而删除val时又有可能导致查询val的前驱,这可能会导致循环调用。
但是这种说法是错误的,因为事实上,如果在pop(val)时调用pre(val),进而导致了一次push(val)后再pop(val),此时val对应节点的cnt至少为2了,所以在本层pop(val)不会调用pre(val),而是会将cnt--。
后记
于是皆大欢喜。
相关文章:
普通平衡树 Splay
Splay 简介 Splay(伸展树),又叫做分裂树,是一种自调整形式的二叉查找树,满足二叉查找树的性质:一个节点左子树的所有节点的权值,均小于这个节点的权值。且其右子树所有节点的权值,均…...

复旦-华盛顿EMBA:走近亿咖通科技,探寻汽车智能化的科创“密码”
6月20日,应复旦大学-华盛顿大学EMBA项目18班校友周靖的邀请,项目校友参访了科创企业ECARX亿咖通科技。作为该公司资深副总裁、中国首席财务官,周靖带领大家通过产品演示、实车驾驶和交流对话探寻汽车智能化的科创“密码”,近距离感…...

学习心得07:C#
之前也没有看过C#的书,C#的程序倒是搞了一些。好在项目不大,我又会套路。 C#很象是JAVA。好像就是JAVA出来之后,微软抄的。好东西就要学习,这不丢脸。 我倒是想,有没有办法把JAVA和C#进行映射,然后直接编译…...

importlib的使用、9个视图子类、视图集、drf之路由、drf之请求响应回顾、GenericViewSet相关流程图
一 drf之请求响应回顾 # 1 drf请求-请求对象:data,query_params,其他跟之前一样,FILES-默认:支持三种编码-局部配置:视图类中-from rest_framework.parsers import JSONParser, FormParser, MultiPartPars…...

国际站阿里云服务器远程桌面密码错误怎么办?苹果手机如何远程登录?
阿里云服务器是云计算领域的一种重要服务,它可以帮助用户在云端部署和管理自己的应用程序和网站。但是,有时候用户可能会遇到远程桌面密码错误的问题,导致无法登录到服务器。本文将介绍一些解决办法,以及如何使用苹果手机远程登录…...
CRMEB多端多语言系统文件上传0Day代审历程
Git仓库: https://github.com/crmeb/CRMEB简介: 两天攻防中,某政局子公司官网后台采用的CRMEB开源商城CMS,挺奇葩,别问怎么总让我碰到这种东西,我也不知道,主打的就是一个魔幻、抽象。最后通过…...
孙哥Spring源码第18集
第18集 refresh()-invokeBeanFactoryPostProcessor-二-ConfigurationClassPostProcessor的处理逻辑 【视频来源于:B站up主孙帅suns Spring源码视频】【微信号:suns45】 1、为什么PropertySource先处理? 因为Conponent A在处理的过程中 要把…...
【STM32】文件系统FATFS与Flash的初步使用
文件系统简介 简介可以不看,直接看移植步骤 文件系统是介于应用层和底层间的模糊层。底层提供API,比如说使用SDIO或者SPI等读写一个字节。文件系统把这些API组合包装起来,并且提供一些列函数,我们可以使用这些函数进行更进一步的…...
Android Glide in RecyclerView,only load visible item when page return,Kotlin
Android Glide in RecyclerView,only load visible item when page return,Kotlin base on this article: Android Glide preload RecyclerView切入后台不可见再切换可见只加载当前视野可见区域item图片,Kotlin_zhangphil的博客…...

【SCI征稿】3个月左右录用!计算机信息技术等领域均可,如机器学习、遥感技术、人工智能、物联网、人工神经网络、数据挖掘、图像处理
计算机技术类SCIE&EI 【期刊简介】IF:1.0-2.0,JCR4区,中科院4区 【检索情况】SCIE&EI 双检,正刊 【参考周期】期刊部系统内提交,录用周期3个月左右,走完期刊部流程上线 【征稿领域】计算机信息…...

Golang 中的 crypto/ecdh 包详解
什么是 ECDH 算法? ECDH(Elliptic Curve Diffie-Hellman)算法是一种基于椭圆曲线的密钥交换协议,用于安全地协商共享密钥(Secret Key),步骤如下: 1. 选择椭圆曲线:ECDH…...

系统学习live555
文章目录 系统学习live555系统学习LIVE555的步骤:1.了解基本概念:2.**查看官方文档:**3.**下载和编译库:**4.**阅读示例代码:**5.**了解库结构:**6.**创建简单项目:**7.**阅读更多文档ÿ…...
Linux下的系统编程——进程的执行与回收(八)
前言: 前面我们对进程已经有了一个初步的了解与认识,现在让我们学习一下进程中一些函数的具体使用,比如exec可以执行一些指定的程序,wait / waitpid可以回收子进程,什么是孤儿进程,什么是僵尸进程…...

第十九章 ObjectScript - 执行例程
文章目录 第十九章 ObjectScript - 执行例程执行例程New 命令 第十九章 ObjectScript - 执行例程 执行例程 执行例程时,使用DO命令,如下所示: do ^routinename要执行一个过程、函数或子程序(不访问其返回值),可以使用以下命令: do label^ro…...

Podman安装与使用
1.Podman简介 Podman是一个无守护进程的容器引擎,用于在Linux系统上开发、管理和运行OCI容器。 Podman的主要功能包括: 创建和管理容器:Podman可以创建、启动、停止和删除容器,以及管理容器的生命周期。容器镜像管理࿱…...

C++ 嵌套循环
一个循环内可以嵌套另一个循环。C 允许至少 256 个嵌套层次。 语法 C 中 嵌套 for 循环 语句的语法: for ( init; condition; increment ) {for ( init; condition; increment ){statement(s);}statement(s); // 可以放置更多的语句 }C 中 嵌套 while 循环 语句的…...

锁( ReentrantLock,Synchronized)
1.lock和synchronized 语法层面 synchronized 是关键字,源码在 jvm 中,用 c 语言实现; Lock 是接口,源码由 jdk 提供,用 java 语言实现; 使用 synchronized 时,退出同步代码块锁会自动释放&…...
)
主频计算-架构真题(二十三)
某文件系统采用多级索引结构,若磁块大小为4K字节,每个块号需占4个字节,那么采用二级索引结构时的文件最大长度可占用()个物理块。 1、1024 2、1024*1024 3、2048*2048 4、4096*4096 答案:B 解析&…...
docker安装redis实操记录
1.Docker拉取镜像 docker pull redis2.Docker挂载配置文件 创建挂载文件夹 mkdir -p /home/redis/data下载默认配置文件 redis.conf 3.启动redis 容器 docker run --restartalways --log-opt max-size100m --log-opt max-file2 -p 6379:6379 --name redis -v /home/redi…...

MobaXterm 突破14个session限制
通常情况下:随着工作时间的增长,我们会保存许许多多的linux到本地的mobastream,然后当超过14个,就会被被限制,这个会让人很头疼。 1. 安装python,配置好环境变量 测试安装成功: 2. 基于项目进行…...
)
从SolidWorks到Geant4仿真:我的第一个粒子探测器CAD模型导入全记录(含CADMesh避坑点)
从SolidWorks到Geant4仿真:我的第一个粒子探测器CAD模型导入全记录(含CADMesh避坑点) 作为一名刚接触粒子探测器仿真的研究生,我花了整整两周时间才成功将SolidWorks设计的模型导入Geant4进行模拟。这个过程远比想象中复杂&#x…...
)
ElevenLabs语音合成效果翻倍的秘密(行业未公开的声学参数调优矩阵)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs英文语音合成效果翻倍的核心洞察 关键瓶颈在于语音上下文建模粒度 ElevenLabs 的高质量语音合成并非单纯依赖更大模型参数量,而是通过细粒度的语义-韵律联合编码实现自然度跃升。…...

【人生底稿 28】新疆出差终章:几番波折终汇报,尽兴踏归津门路
三日游玩尽数落幕,忙碌工作正式回归。轻松的闲暇时光悄然收尾,紧绷的工作状态再次上线。整趟新疆之行,在起伏辗转中迎来最终收尾。一、深夜复盘材料,彻夜待汇报游玩结束回到酒店,我没有松懈休息,静下心重新…...

mnestra:基于ESBuild的极简前端构建工具,速度与体验的完美平衡
1. 项目概述:一个被低估的现代前端构建工具如果你在前端开发领域摸爬滚打超过五年,大概率经历过从 Grunt、Gulp 到 Webpack 的构建工具变迁史。每次工具的迭代,都伴随着配置文件的日益复杂和构建速度的微妙下降。当 Vite 携 ES Module 原生支…...

OSINT自动化平台ClawShield:模块化架构与安全运营实战解析
1. 项目概述:一个面向安全运营的公开情报收集与分析平台最近在整理自己的开源项目收藏夹,发现一个挺有意思的仓库,叫SleuthCo/clawshield-public。乍一看这个名字,“ClawShield”,爪子与盾牌,就透着一股子攻…...

恶劣环境下LED发光服饰的可靠系统构建:从设计到工艺的工程实践
1. 项目概述与核心挑战如果你曾经尝试过制作一件会发光的服装,无论是为了音乐节、万圣节还是水下表演,你大概都体会过那种“亮一次,修三次”的挫败感。LED灯带在工作室的桌面上测试时完美无瑕,一旦穿到身上,开始活动、…...

Taotoken用量看板如何帮助个人开发者管理月度预算
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken用量看板如何帮助个人开发者管理月度预算 对于独立工作的个人开发者而言,项目预算往往是决定技术选型与使用策…...

AICoverGen终极指南:5分钟用AI制作专业级翻唱歌曲
AICoverGen终极指南:5分钟用AI制作专业级翻唱歌曲 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想不想让AI…...

qmcdump终极指南:三步解锁QQ音乐加密音频文件
qmcdump终极指南:三步解锁QQ音乐加密音频文件 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 还在为QQ音乐下…...

3个维度深度解析:UABEA如何重塑Unity资源处理生态
3个维度深度解析:UABEA如何重塑Unity资源处理生态 【免费下载链接】UABEA c# uabe for newer versions of unity 项目地址: https://gitcode.com/gh_mirrors/ua/UABEA 在Unity游戏开发和资源处理的复杂生态中,开发者常常面临一个核心挑战…...