不就是G2O嘛
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
SLAM的后端一般分为两种处理方法,一种是以扩展卡尔曼滤波(EKF)为代表的滤波方法,一种是以图优化为代表的非线性优化方法。不过,目前SLAM研究的主流热点几乎都是基于图优化的。
顺便总结下滤波方法的优缺点:
优点:在当时计算资源受限、待估计量比较简单的情况下,EKF为代表的滤波方法比较有效,经常用在激光SLAM中。
缺点:它的一个大缺点就是存储量和状态量是平方增长关系,因为存储的是协方差矩阵,因此不适合大型场景。而现在基于视觉的SLAM方案,路标点(特征点)数据很大,滤波方法根本吃不消,所以此时滤波的方法效率非常低。
在SLAM里,图优化一般分解为两个任务:
1、构建图。机器人位姿作为顶点,位姿间关系作为边。
2、优化图。调整机器人的位姿(顶点)来尽量满足边的约束,使得误差最小。
g2o安装很简单,参考GitHub上官网:
https://github.com/RainerKuemmerle/g2o

1.顶点和边
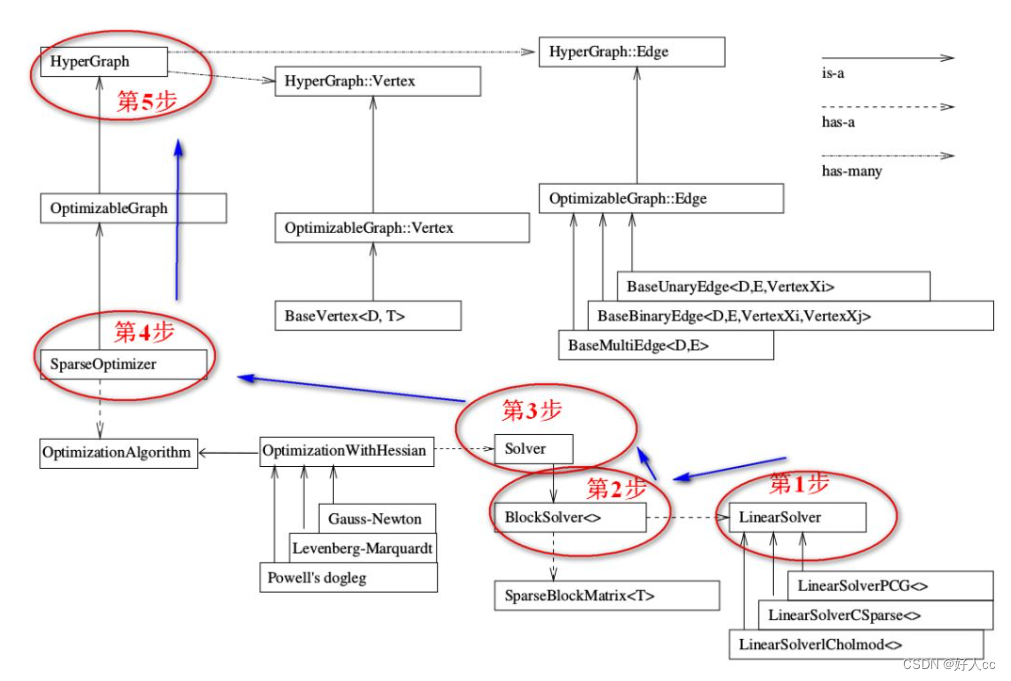
注意看 has-many 箭头,你看这个超图包含了许多顶点(HyperGraph::Vertex)和边(HyperGraph::Edge)。而这些顶点顶点继承自 Base Vertex,也就是OptimizableGraph::Vertex,而边可以继承自 BaseUnaryEdge(单边), BaseBinaryEdge(双边)或BaseMultiEdge(多边),它们都叫做OptimizableGraph::Edge
2.配置SparseOptimizer的优化算法和求解器
整个图的核心SparseOptimizer 包含一个优化算法(OptimizationAlgorithm)的对象。OptimizationAlgorithm是通过OptimizationWithHessian 来实现的。其中迭代策略可以从Gauss-Newton(高斯牛顿法,简称GN), Levernberg-Marquardt(简称LM法), Powell's dogleg 三者中间选择一个(我们常用的是GN和LM)
3.如何求解
OptimizationWithHessian 内部包含一个求解器(Solver),这个Solver实际是由一个BlockSolver组成的。这个BlockSolver有两个部分,一个是SparseBlockMatrix ,用于计算稀疏的雅可比和Hessian矩阵;一个是线性方程的求解器(LinearSolver),它用于计算迭代过程中最关键的一步HΔx=−b,LinearSolver有几种方法可以选择:PCG, CSparse, Choldmod,具体定义后面会介绍
高博在十四讲中g2o求解曲线参数的例子来说明,源代码地址
https://github.com/gaoxiang12/slambook/edit/master/ch6/g2o_curve_fitting/main.cpp
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量维度为3,误差值维度为1// 第1步:创建一个线性求解器LinearSolver
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>(); // 第2步:创建BlockSolver。并用上面定义的线性求解器初始化
Block* solver_ptr = new Block( linearSolver ); // 第3步:创建总求解器solver。并从GN, LM, DogLeg 中选一个,再用上述块求解器BlockSolver初始化
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );// 第4步:创建终极大boss 稀疏优化器(SparseOptimizer)
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器
optimizer.setVerbose( true ); // 打开调试输出// 第5步:定义图的顶点和边。并添加到SparseOptimizer中
CurveFittingVertex* v = new CurveFittingVertex(); //往图中增加顶点
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v );
for ( int i=0; i<N; i++ ) // 往图中增加边
{CurveFittingEdge* edge = new CurveFittingEdge( x_data[i] );edge->setId(i);edge->setVertex( 0, v ); // 设置连接的顶点edge->setMeasurement( y_data[i] ); // 观测数值edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) ); // 信息矩阵:协方差矩阵之逆optimizer.addEdge( edge );//设置迭代次数
}// 第6步:设置优化参数,开始执行优化
optimizer.initializeOptimization();
optimizer.optimize(100);1.线性求解器
LinearSolverCholmod :使用sparse cholesky分解法。继承自LinearSolverCCS
LinearSolverCSparse:使用CSparse法。继承自LinearSolverCCS
LinearSolverPCG :使用preconditioned conjugate gradient 法,继承自LinearSolver
LinearSolverDense :使用dense cholesky分解法。继承自LinearSolver
LinearSolverEigen: 依赖项只有eigen,使用eigen中sparse Cholesky 求解,因此编译好后可以方便的在其他地方使用,性能和CSparse差不多。继承自LinearSolver2.创建BlockSolver。并用上面定义的线性求解器初始化。
BlockSolver 内部包含 LinearSolver,用上面我们定义的线性求解器LinearSolver来初始化。
你点进去会发现 BlockSolver有两种定义方式,一种是指定的固定变量的solver,我们来看一下定义
using BlockSolverPL = BlockSolver< BlockSolverTraits<p, l> >;其中p代表pose的维度(注意一定是流形manifold下的最小表示),l表示landmark的维度
另一种是可变尺寸的solver,定义如下
using BlockSolverX = BlockSolverPL<Eigen::Dynamic, Eigen::Dynamic>;这是因为在某些应用场景,我们的Pose和Landmark在程序开始时并不能确定,那么此时这个块状求解器就没办法固定变量,此时使用这个可变尺寸的solver,所有的参数都在中间过程中被确定另外你看block_solver.h的最后,预定义了比较常用的几种类型,如下所示:
BlockSolver_6_3 :表示pose 是6维,观测点是3维。用于3D SLAM中的BA
BlockSolver_7_3:在BlockSolver_6_3 的基础上多了一个scale
BlockSolver_3_2:表示pose 是3维,观测点是2维3.创建总求解器solver。并从GN, LM, DogLeg 中选一个,再用上述块求解器BlockSolver初始化
你点进去 GN、 LM、 Doglet算法内部,会发现他们都继承自同一个类OptimizationWithHessian,如下图所示,这也和我们最前面那个图是相符的。然后,我们点进去看 OptimizationAlgorithmWithHessian,发现它又继承自OptimizationAlgorithm,这也和前面的相符,总之,在该阶段,我们可以选则三种方法:
g2o::OptimizationAlgorithmGaussNewton
g2o::OptimizationAlgorithmLevenberg
g2o::OptimizationAlgorithmDogleg 4.创建终极大boss 稀疏优化器(SparseOptimizer),并用已定义求解器作为求解方法。
创建稀疏优化器
g2o::SparseOptimizer optimizer;用前面定义好的求解器作为求解方法:
SparseOptimizer::setAlgorithm(OptimizationAlgorithm* algorithm)其中setVerbose是设置优化过程输出信息用的
SparseOptimizer::setVerbose(bool verbose)5.定义图的顶点和边。并添加到SparseOptimizer中。
6.设置优化参数,开始执行优化。
设置SparseOptimizer的初始化、迭代次数、保存结果等。
SparseOptimizer::initializeOptimization(HyperGraph::EdgeSet& eset)设置迭代次数,然后就开始执行图优化了。
SparseOptimizer::optimize(int iterations, bool online)https://www.jianshu.com/p/e16ffb5b265d
https://blog.csdn.net/heyijia0327/article/details/47686523
相关文章:
不就是G2O嘛
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码 SLAM的后端一般分为两种处理方法,一种是以扩展卡尔曼滤波(EKF)为代表的滤波方法,一种是以图优化为代表的非线性优化方法。不过,目前SLAM研究的主…...

C#开发的OpenRA游戏之系统参数选项按钮
C#开发的OpenRA游戏之系统参数选项按钮 前面分析了信标按钮,从图上可以看到,靠右边的按钮,就是系统参数选项按钮: 这个按钮与前面三个按钮是不一样的,虽然它们在排列位置上是放在一起,但是处理的方法方式是不一样的,因为这个选项按钮,并不需要发命令给服务器,再返回来…...
苹果启动2024年SRDP计划:邀请安全专家使用定制iPhone寻找漏洞
苹果公司昨天(8月30日)正式宣布开始接受2024 年iPhone安全研究设备计划的申请,iOS 安全研究人员可以在 10 月底之前申请安全研究设备 SRD。 SRD设备是专门向安全研究人员提供的iPhone14Pro,该设备具有专为安全研究而设计的特殊硬…...
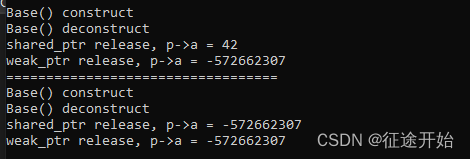
std::make_shared和new初始化智能指针的区别
先看代码: class Base {public:Base(int num):a(num) {std::cout << "Base() construct" << std::endl;}~Base() {std::cout << "Base() deconstruct" << std::endl;}int Get() {return a;}private:int a; };void tes…...

无涯教程-JavaScript - ERFC.PRECISE函数
描述 ERFC.PRECISE函数返回x和无穷大之间集成的互补ERF函数。 互补误差函数等于1-ERF(即1-误差函数),由等式给出- $$Erfc(x) \frac {2} {\sqrt {\pi}} \int_ {x} ^ {\infty} e ^ {-t ^ 2} dt $$ 语法 ERFC.PRECISE(x)争论 Argument描述Required/OptionalxThe lower bound…...

2023国赛数学建模C题思路分析 - 蔬菜类商品的自动定价与补货决策
# 1 赛题 在生鲜商超中,一般蔬菜类商品的保鲜期都比较短,且品相随销售时间的增加而变差, 大部分品种如当日未售出,隔日就无法再售。因此, 商超通常会根据各商品的历史销售和需 求情况每天进行补货。 由于商超销售的蔬菜…...

手写Spring:第1章-开篇介绍,手写Spring
文章目录 一、手写Spring二、Spring 生命周期 一、手写Spring 💡 目标:我们该对 Spring 学到什么程度?又该怎么学习呢? 手写简化版 Spring 框架,了解 Spring 核心原理,为后续再深入学习 Spring 打下基础。在…...

C语言中,字节对齐是一种重要的内存管理概念
C语言中,字节对齐是一种重要的内存管理概念 字节对齐的目的是为了提高内存访问的效率。因为CPU访问内存的最小单位是字节,所以如果数据结构的成员以正确的字节边界对齐,那么CPU就可以直接访问这些成员,而不需要进行额外的内存移动…...
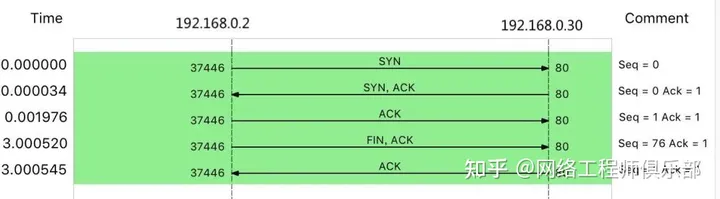
网络丢包问题,敢不敢这样定位?
下午好,我的网工朋友。 所谓丢包,是指在网络数据的收发过程中,由于种种原因,数据包还没传输到应用程序中,就被丢弃了。 这些被丢弃包的数量,除以总的传输包数,也就是我们常说的丢包率。 丢包…...
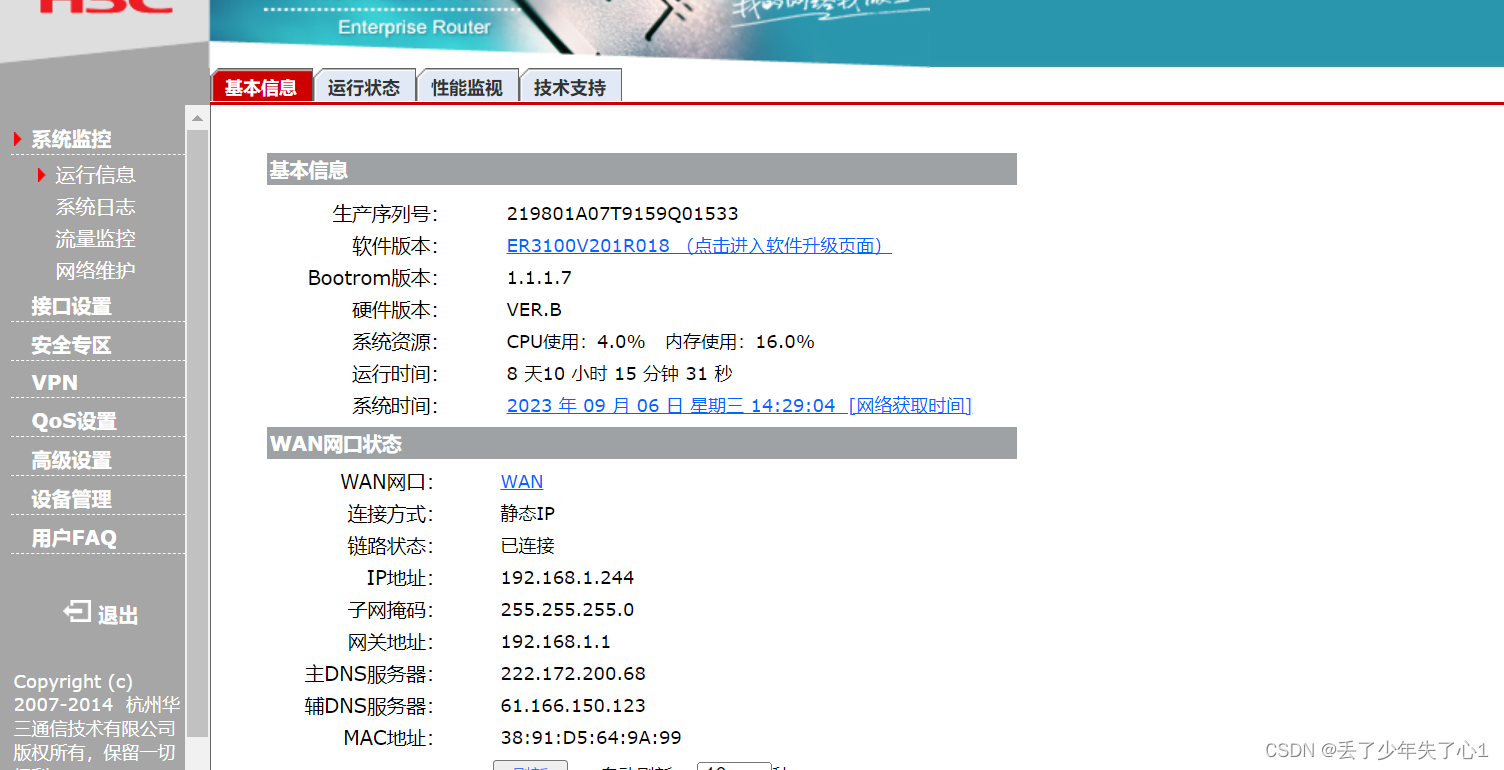
【漏洞复现】H3C路由器信息泄露任意用户登录
漏洞描述 通过访问特地址得到密码可进行登录。 免责声明 技术文章仅供参考,任何个人和组织使用网络应当遵守宪法法律,遵守公共秩序,尊重社会公德,不得利用网络从事危害国家安全、荣誉和利益,未经授权请勿利用文章中…...

随机数算法,SQL
SELECT* FROMprizes_config WHEREweight > ( SELECT FLOOR( RAND() * MAX( weight )) FROM prizes_config ) order by weight asc-- LIMIT 1;记录 id 权重 1 5 2 10 3 50 4 100 找权重最大的那个值,调用rand()函数&#…...

什么是软件测试+软件测试的分类【软件测试】
软件测试 什么是软件? 软件 程序 数据 文档 软件测试的对象有哪些?程序 数据 文档 C/S与B/S架构 C/S:客户端服务器,这种就是我们一定要安装一个客户端才能够用的软件,就叫C/S。比如:微信、qq B/S&am…...

2023国赛C题解题思路:蔬菜类商品的自动定价与补货决策
本次将全程提供国赛C题完整解题思路及代码,同时共享一些国赛论文模板等资料,需要的小伙伴可以关注一下,持续更新!大家也可以关注B站视频:不知名数学家小P 实时更新 本次C题是一道较为简单的统计分析题目,建…...

MIT6.824 Spring2021 Lab 1: MapReduce
文章目录 0x00 准备0x01 MapReduce简介0x02 RPC0x03 调试0x04 代码coordinator.gorpc.goworker.go 0x00 准备 阅读MapReduce论文配置GO环境 因为之前没用过GO,所以 先在网上学了一下语法A Tour of Go 感觉Go的接口和方法的语法和C挺不一样, 并发编程也挺有意思 0x01 MapRed…...

JavaScript 日期 – 如何使用 DayJS 库在 JS 中处理日期和时间
当涉及到在 JavaScript 中处理日期和时间时,开发人员经常发现自己正在努力应对内置对象的复杂性Date。 虽然普通 JavaScript 提供了基本功能,但使用起来可能相当麻烦,尤其是在处理解析、格式化和操作日期时。 这就是像 DayJS 这样的外部库发挥作用的地方,它提供了大量的优…...

Docker基础入门:Docker基础总结篇--超详细
Docker基础入门:Docker基础总结篇[docker3要素、docker安装配置、容器使用、镜像管理发布] 一、Docker 3要素1.1、镜像(Image)1.2、容器(Container)1.3、仓库(Registry)1.4 、总结 二、Docker安…...
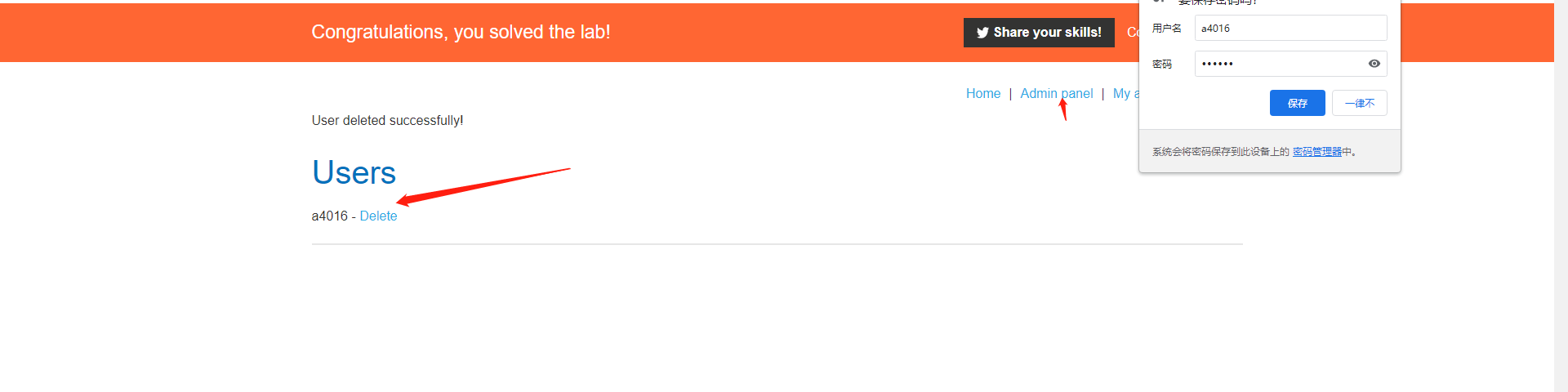
对象临时中间状态的条件竞争覆盖
Portswigger练兵场之条件竞争 🦄条件竞争之对象临时中间状态的条件竞争 Lab: Partial construction race conditions🚀实验前置必要知识点 某些框架尝试通过使用某种形式的请求锁定来防止意外的数据损坏。例如,PHP 的本机会话处理程序模块…...
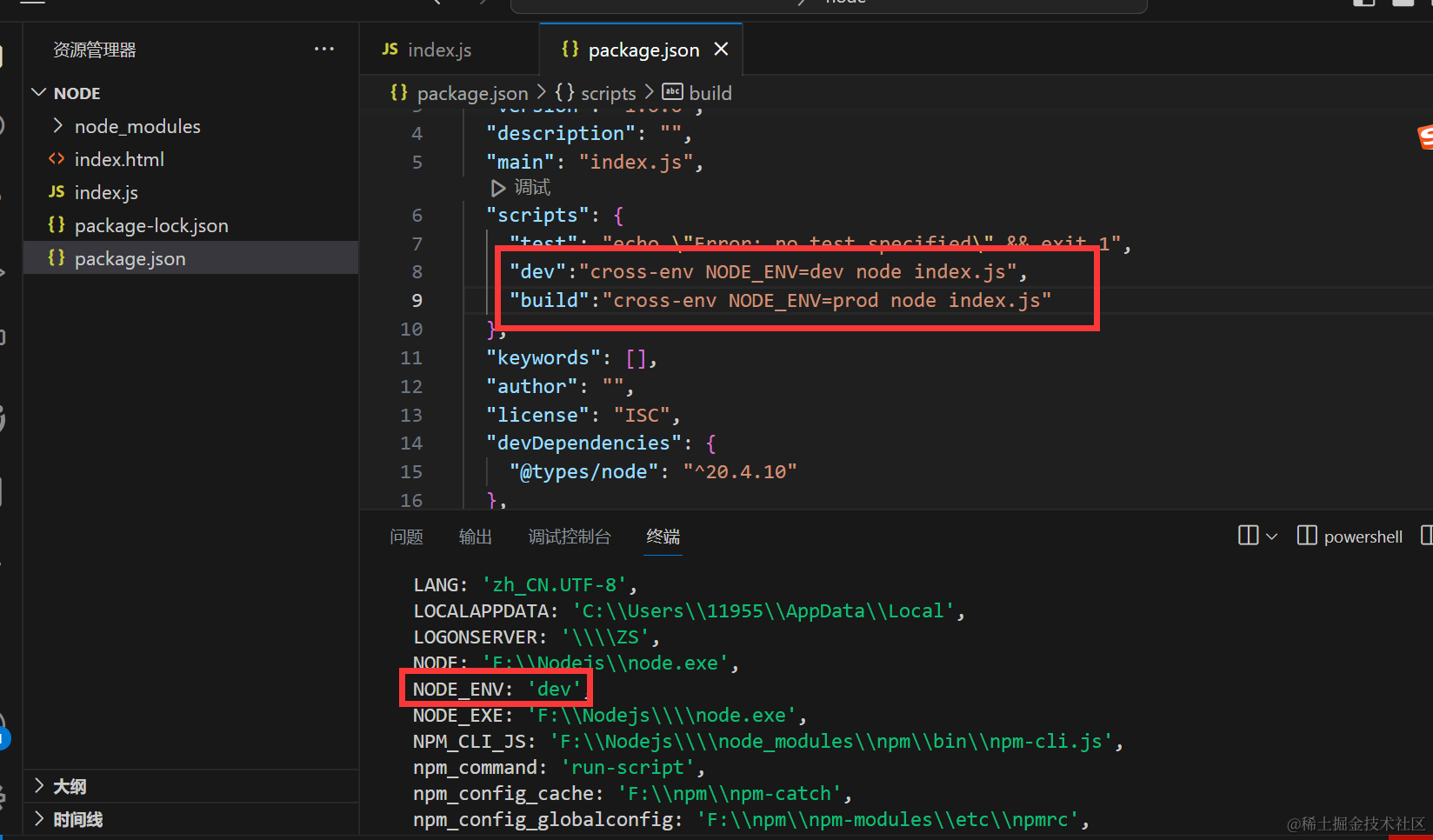
Nodejs 第十四章(process)
process 是Nodejs操作当前进程和控制当前进程的API,并且是挂载到globalThis下面的全局API API 介绍 1. process.arch 返回操作系统 CPU 架构 跟我们之前讲的os.arch 一样 arm、arm64、ia32、mips、mipsel、ppc、ppc64、s390、s390x、以及 x64 2. process.cwd() …...
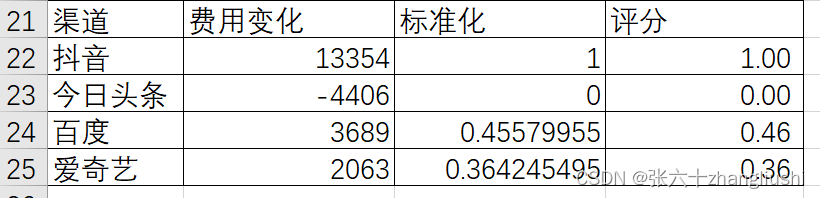
数据分析因子评分学习
当多个因素影响一个结果时,我们需要综合考虑这些因素分别对结果德影响。因子评分就是用于比较其对结果德影响程度。 文章目录 前言一、案例背景二、解决方案(一)分析思路(二)剔除无关数据(三)求…...

【postgresql 基础入门】数据库服务的管理
数据库服务管理 专栏内容: postgresql内核源码分析手写数据库toadb并发编程 开源贡献: toadb开源库 个人主页:我的主页 管理社区:开源数据库 座右铭:天行健,君子以自强不息;地势坤ÿ…...

开源HR智能体openhr-agent:本地部署、模块化设计与核心应用场景解析
1. 项目概述:一个开源的HR智能体最近在GitHub上看到一个挺有意思的项目,叫openhr-agent。光看名字,你可能会觉得这又是一个“AI要取代HR”的噱头工具。但实际深入了解一下,我发现它的定位和设计思路,比想象中要务实和清…...

从Starpod项目解析个人AI工作流引擎:架构、实现与应用
1. 项目概述:从“星荚”到个人AI工作流引擎最近在AI工具圈里,一个名为sinaptik-ai/starpod的项目引起了我的注意。乍一看这个标题,可能会觉得有些抽象——“星荚”是什么?AI“豆荚”?但当你深入其GitHub仓库࿰…...

ComfyUI-Inpaint-CropAndStitch终极指南:30倍加速AI图像修复的完整教程
ComfyUI-Inpaint-CropAndStitch终极指南:30倍加速AI图像修复的完整教程 【免费下载链接】ComfyUI-Inpaint-CropAndStitch ComfyUI nodes to crop before sampling and stitch back after sampling that speed up inpainting 项目地址: https://gitcode.com/gh_mir…...

如何快速上手MuseTalk:从零开始的实时高质量唇语同步完整指南
如何快速上手MuseTalk:从零开始的实时高质量唇语同步完整指南 【免费下载链接】MuseTalk MuseTalk: Real-Time High Quality Lip Synchorization with Latent Space Inpainting 项目地址: https://gitcode.com/gh_mirrors/mu/MuseTalk 想要为静态人物图像添加…...

基于BLE与CircuitPython的无线8-bit音乐合成器DIY全攻略
1. 项目概述与核心思路想不想亲手做一个能揣在口袋里,随时随地弹奏出复古8-bit音乐的小玩意儿?不是那种手机App模拟的,而是实实在在的、有物理按键、能无线连接、还会发光的小合成器。今天分享的这个项目,就是基于两块小巧但功能强…...

Next.js静态站点图片优化实战:next-image-export-optimizer配置指南
1. 项目概述:为什么我们需要一个“静态图片优化器”?如果你和我一样,经常用 Next.js 做项目,那你肯定对next/image组件又爱又恨。爱的是它开箱即用的图片懒加载、自动格式转换和响应式适配,恨的是它在构建和部署时带来…...

不止Keil5:VSCode+GCC也能玩转GD32单片机?手把手教你搭建轻量级开发环境
超越Keil5:用VSCodeGCC打造高效GD32开发环境 在嵌入式开发领域,Keil MDK长期以来一直是ARM架构单片机开发的主流选择。然而,随着现代开发工具的演进,越来越多的开发者开始寻求更轻量、更灵活且完全免费的替代方案。本文将带你探索…...

实测taotoken多模型聚合端点的响应延迟与稳定性表现
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 实测taotoken多模型聚合端点的响应延迟与稳定性表现 作为开发者,在将大模型能力集成到应用时,除了功能本身…...

掌握Superpowers Skills
Superpowers 是一套面向开发过程的插件化技能系统,旨在帮助个人开发者与团队更高效地完成从需求探索到代码交付的全流程。其内置的十余项技能覆盖了软件开发生命周期的各个关键节点,并且可以按照自然的工作流顺序进行分组与调用。 本文将基于 Superpower…...
)
LVGL字体优化实战:如何将中文字库放到外部SPI Flash并动态加载(节省内部RAM)
LVGL外部SPI Flash字库优化实战:RAM节省与性能平衡的艺术 在嵌入式UI开发中,中文显示一直是资源受限设备的痛点。当STM32F4系列芯片遇到需要显示多语言菜单的智能家居面板,或是工业HMI设备需要展示复杂参数时,传统的内部字库方案往…...