智能小车之跟随小车、避障小车原理和代码
目录
1. 红外壁障模块分析编辑
2. 跟随小车的原理
3. 跟随小车开发和调试代码
4. 超声波模块介绍
5. 摇头测距小车开发和调试代码
1. 红外壁障模块分析
原理和循迹是一样的,循迹红外观朝下,跟随朝前
- TCRT5000传感器的红外发射二极管不断发射红外线
- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时
- 红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态
- 被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和
- 此时模块的输出端为低电平,指示二极管被点亮
- 总结就是一句话,没反射回来,D0输出高电平,灭灯
2. 跟随小车的原理
- 左边跟随模块能返回红外,输出低电平,右边不能返回,输出高电平,说明物体在左边,需要左转
- 右边跟随模块能返回红外,输出低电平,左边不能返回,输出高电平,说明物体在右边,需要右转
3. 跟随小车开发和调试代码
//main.c
#include "motor.h"
#include "delay.h"
#include "reg52.h"//sbit leftSensor = P2^7;
//sbit rightSensor = P2^6;sbit leftSensor = P2^5;
sbit rightSensor = P2^4;void main()
{while(1){if(leftSensor == 0 && rightSensor == 0){goForward();}if(leftSensor == 1 && rightSensor == 0){goRight();}if(leftSensor == 0 && rightSensor == 1){goLeft();}if(leftSensor == 1 && rightSensor == 1){//停stop();}}
}//motor.c
#include "reg52.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}//delay.c#include "intrins.h"void Delay1000ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 8;j = 1;k = 243;do{do{while (--k);} while (--j);} while (--i);
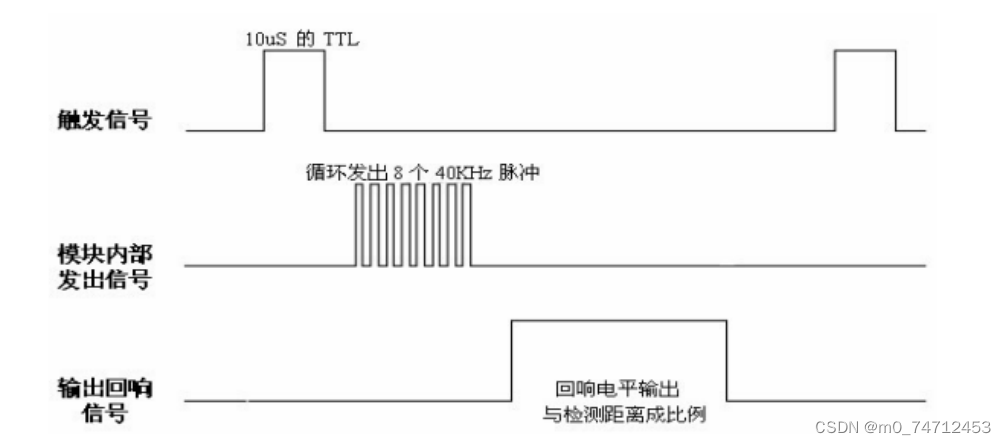
}4. 超声波模块介绍
使用超声波模块,型号:HC-SR04

- 怎么让它发送波 Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了 Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波 Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间 Echo引脚维持高电平的时间! 波发出去的那一下,开始启动定时器 波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离 距离 = 速度 (340m/s)* 时间/2
时序图:
5. 摇头测距小车开发和调试代码
//main.c
#include "reg52.h"
#include "hc04.h"
#include "delay.h"
#include "sg90.h"
#include "motor.h"#define MIDDLE 0
#define LEFT 1
#define RIGHT 2void main()
{char dir;double disMiddle;double disLeft;double disRight;Time0Init();Time1Init();//舵机的初始位置sgMiddle();Delay300ms();Delay300ms();dir = MIDDLE;while(1){if(dir != MIDDLE){sgMiddle();dir = MIDDLE;Delay300ms();}disMiddle = get_distance();if(disMiddle > 35){//前进goForward();}else if(disMiddle < 10){goBack();}else{//停止stop();//测左边距离sgLeft();Delay300ms();disLeft = get_distance();sgMiddle();Delay300ms();sgRight();dir = RIGHT;Delay300ms();disRight = get_distance();if(disLeft < disRight){goRight();Delay150ms();stop();}if(disRight < disLeft){goLeft();Delay150ms();stop();}}}
}//hc04.c
#include "reg52.h"
#include "delay.h"sbit Trig = P2^3;
sbit Echo = P2^2;void Time1Init()
{ TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10;TH1 = 0;TL1 = 0;//设置定时器0工作模式1,初始值设定0开始数数,不着急启动定时器
}void startHC()
{Trig = 0;Trig = 1;Delay10us();Trig = 0;
}double get_distance()
{double time;//定时器数据清零,以便下一次测距TH1 = 0;TL1 = 0;//1. Trig ,给Trig端口至少10us的高电平startHC();//2. echo由低电平跳转到高电平,表示开始发送波while(Echo == 0);//波发出去的那一下,开始启动定时器TR1 = 1;//3. 由高电平跳转回低电平,表示波回来了while(Echo == 1);//波回来的那一下,我们开始停止定时器TR1 = 0;//4. 计算出中间经过多少时间time = (TH1 * 256 + TL1)*1.085;//us为单位//5. 距离 = 速度 (340m/s)* 时间/2return (time * 0.017);
}//delay.c
#include "intrins.h"void Delay2000ms() //@11.0592MHz
{unsigned char i, j, k;i = 15;j = 2;k = 235;do{do{while (--k);} while (--j);} while (--i);
}void Delay10us() //@11.0592MHz
{unsigned char i;i = 2;while (--i);
}void Delay300ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 3;j = 26;k = 223;do{do{while (--k);} while (--j);} while (--i);
}void Delay150ms() //@11.0592MHz
{unsigned char i, j, k;i = 2;j = 13;k = 237;do{do{while (--k);} while (--j);} while (--i);
}void Delay450ms() //@11.0592MHz
{unsigned char i, j, k;_nop_();i = 4;j = 39;k = 209;do{do{while (--k);} while (--j);} while (--i);
}//sg90.c
#include "reg52.h"
#include "delay.h"sbit sg90_con = P1^1;int jd;
int cnt = 0;void Time0Init()
{//1. 配置定时器0工作模式位16位计时TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01;//2. 给初值,定一个0.5出来TL0=0x33;TH0=0xFE;//3. 开始计时TR0 = 1;TF0 = 0;//4. 打开定时器0中断ET0 = 1;//5. 打开总中断EAEA = 1;
}void sgMiddle()
{//中间位置jd = 3; //90度 1.5ms高电平cnt = 0;
}void sgLeft()
{//左边位置jd = 5; //135度 1.5ms高电平cnt = 0;
}void sgRight()
{//右边位置jd = 1; //0度cnt = 0;
}void Time0Handler() interrupt 1
{cnt++; //统计爆表的次数. cnt=1的时候,报表了1//重新给初值TL0=0x33;TH0=0xFE;//控制PWM波if(cnt < jd){sg90_con = 1;}else{sg90_con = 0;}if(cnt == 40){//爆表40次,经过了20mscnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1ssg90_con = 1;}}//motor.c
#include "reg52.h"sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;void goForward()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 1;
}void goRight()
{LeftCon1A = 0;LeftCon1B = 1;RightCon1A = 0;RightCon1B = 0;
}void goLeft()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 1;
}void goBack()
{LeftCon1A = 1;LeftCon1B = 0;RightCon1A = 1;RightCon1B = 0;
}void stop()
{LeftCon1A = 0;LeftCon1B = 0;RightCon1A = 0;RightCon1B = 0;
}相关文章:
智能小车之跟随小车、避障小车原理和代码
目录 1. 红外壁障模块分析编辑 2. 跟随小车的原理 3. 跟随小车开发和调试代码 4. 超声波模块介绍 5. 摇头测距小车开发和调试代码 1. 红外壁障模块分析 原理和循迹是一样的,循迹红外观朝下,跟随朝前 TCRT5000传感器的红外发射二极管不断发射红外…...

行业追踪,2023-09-07
自动复盘 2023-09-07 凡所有相,皆是虚妄。若见诸相非相,即见如来。 k 线图是最好的老师,每天持续发布板块的rps排名,追踪板块,板块来开仓,板块去清仓,丢弃自以为是的想法,板块去留让…...
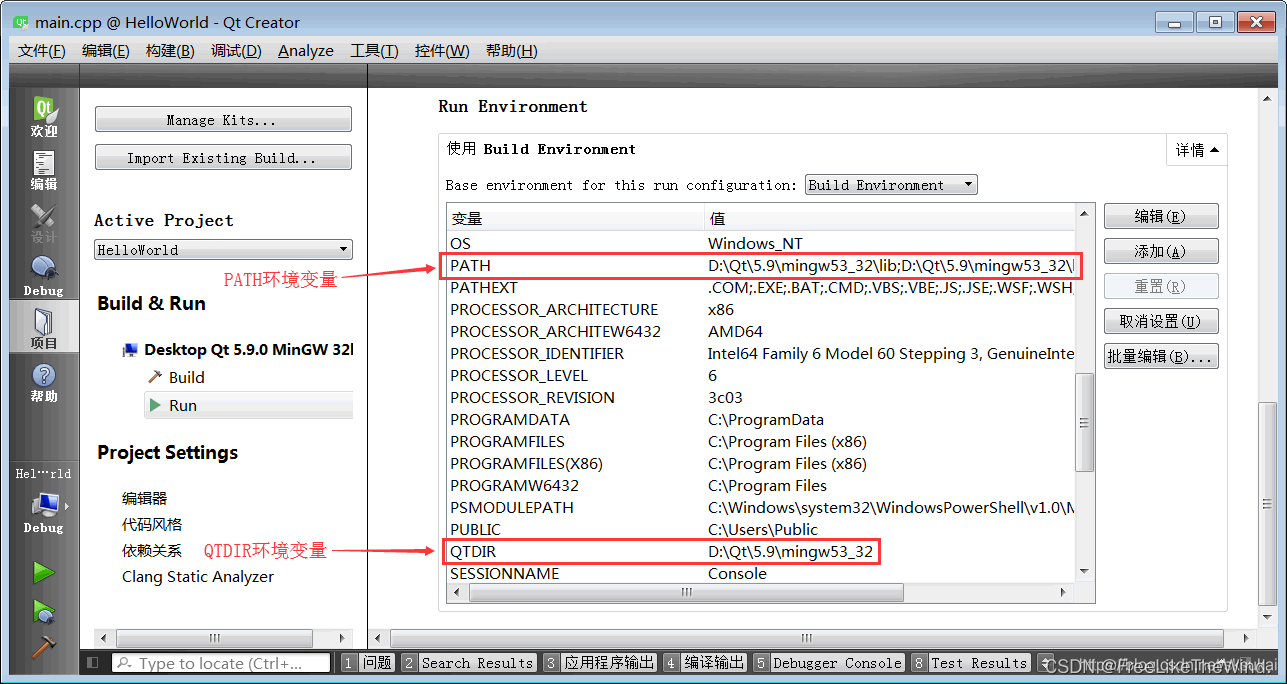
Qt creator中项目的构建配置和运行设置
使用 Qt Creator 集成开发环境构建和运行程序是一件非常简单的事情,一个按钮或者一个快捷键搞定全部,大家已经都了解了。但是,这些看起来简单的过程,背后到底发生了什么呢? 点击 Qt Creator 项目模式,可以…...
蓝桥杯打卡Day3
文章目录 吃糖果递推数列 一、吃糖果IO链接 本题思路:本题题意就是斐波那契数列! #include <bits/stdc.h>typedef uint64_t i64;i64 f(i64 n) {if(n1) return 1;if(n2) return 2;return f(n-1)f(n-2); }signed main() {std::ios::sync_with_stdio(false);s…...

Linux系统编程--IO
文章目录 一、系统调用1.open()1.1 所需基础知识1.2. open() 详解1.3 示例代码 二、标准IO三、高级IO 一、系统调用 1.open() 1.1 所需基础知识 Linux遵循一切皆是文件的理念,因此,很多的交互工作都是通过读取和写入文件来完成。 文件必须被打开才能被…...
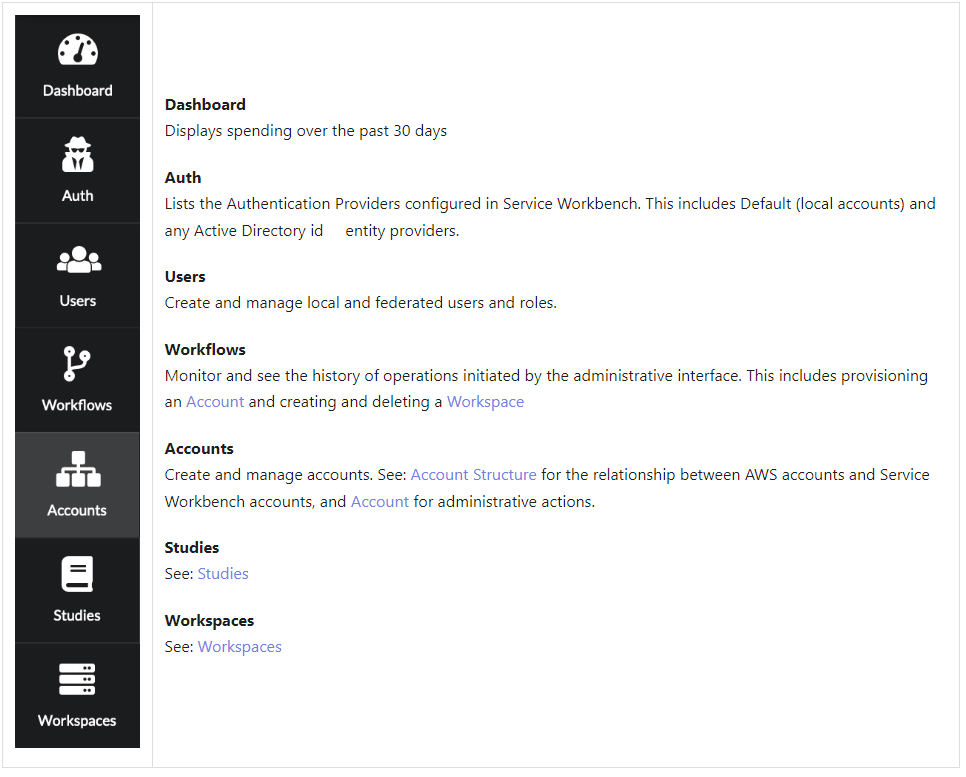
亚马逊云科技通过生成式AI,帮助清华RIOS加速计算和分析的处理效率
近日,硬件创建平台Efabless宣布了其第一届“生成式AI开源芯片设计挑战赛”(AI Generated Open-Source Silicon Design Challenge)的评选结果。来自清华大学的RISC-V国际开源实验室(RIOS Lab)团队基于亚马逊云科技云上科…...

全志T113-S3入门资料汇总(避坑指南)一
也是闲着无事买了个芒果派的T113的小板子,因为自己以前搞过Linux,工作也跟Linux相关,本以为可以很快搞好开发环境,结果还是折腾了两个周末,所以就把资料整理下,关键的地方列出来,希望大家少走弯…...
3dMax全球学习资源、资源文件和教程 !
此样例教育教程和学习资源旨在提供使用Autodesk 3ds Max时的计划知识和培训、正确的工作流、流程管理和最佳实践。 您在Autodesk三维设计领域的职业生涯 有关使用3ds Max和Maya在计算机图形领域开始职业生涯的提示(包括新的3ds Max和Maya介绍教程,以复…...

API接口是什么?有哪些免费的API接口?
API(接口)是什么? 举个常见的例子,在京东上下单付款之后,商家选用顺丰发货,然后你就可以在京东上实时查看当前的物流信息。京东和顺丰作为两家独立的公司,为什么会在京东上实时看到顺丰的快递信…...

USB Server应用于汇丰晋信基金
为了满足UKey远程连接调用、安全集群管理需求,汇丰晋信基金选择了朝天椒USB Server作为其解决方案。朝天椒USB Server以其卓越的性能和可靠性,为汇丰晋信基金提供了稳定的Ukey连接管理服务。这一选择不仅提高了汇丰晋信基金的工作效率,还保障…...
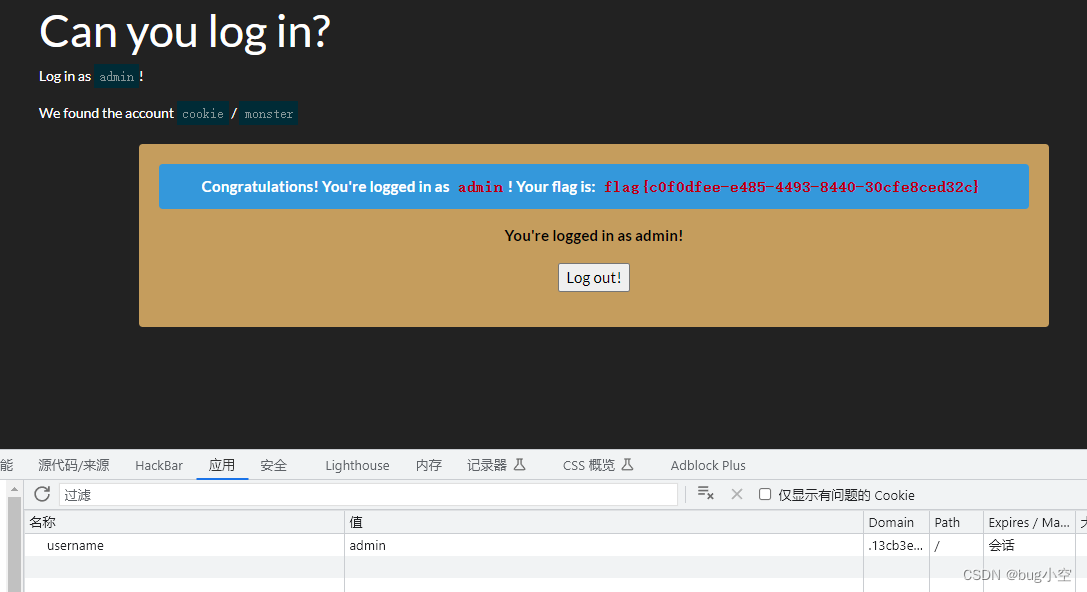
[BSidesCF 2019]Kookie 1 , cookie伪造
给了一个用户和密码 用户名:cookie 密码:monster 登录后查看cookie 发现就是用户名维持登录 那么修改用户名为 admin 得到flag...

如何查看MySQL的安装位置
MySQL的安装位置 1、查看安装目录 参数 路径 解释 备注 --basedir /usr/bin 相关命令目录 mysqladmin mysqldump等命令 --datadir /var/lib/mysql/ mysql 数据库文件的存放路径 --plugin-dir /usr/lib64/mysql/plugin mysql插件存放路径 --log-error …...

ui设计岗位招聘要求有哪些? 优漫动游
UI设计师的工作是接到使用者轮廓、线框草稿后,创造出好看、好用的画面,视情况会搭配VisualDesigner(视觉设计师),不过偶尔还是需要自己做图,包含插图、icon绘制等;透过设计过的画面,…...

Swift报错:“‘nil‘ is incompatible with return type ‘User‘”
func getUserById(userId: Int) -> User {if (userId ! nil) {...}return nil } 上述代码报了一个错误:“nil is incompatible with return type User”,表示“nil”与返回类型“User”不兼容。 解决方案: 将返回值类型改为Optional类型…...
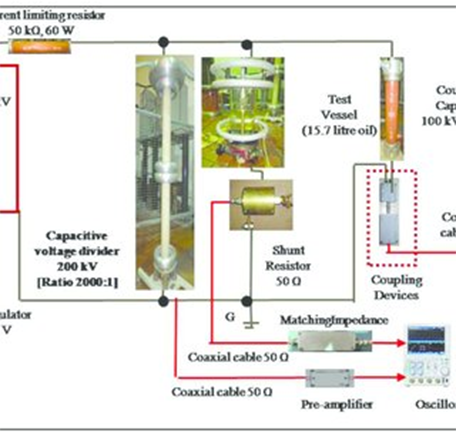
LabVIEW利用局部放电分析高压电气设备状态诊断
LabVIEW利用局部放电分析高压电气设备状态诊断 目前,高压电气设备状态的监控系统解决了早期故障检测的问题。局部放电起源于电力电气装置的绝缘。局部放电会导致绝缘层逐渐磨损和加速老化,因此可能导致绝缘完全击穿。因此,局部放电检测及其特…...

TCP/IP UDP广播无法发送或接收
TCP/IP UDP广播无法发送或者接收数据 在看《TCP/IP 网络编程》这本书的时候,看到广播那一节,跟着书上写代码,怎么写都不行,广播就是没法发送/接收,发送端一直在发送数据,接收端就是没有反应。 对了好几遍…...

清理Maven仓库中下载失败的文件
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
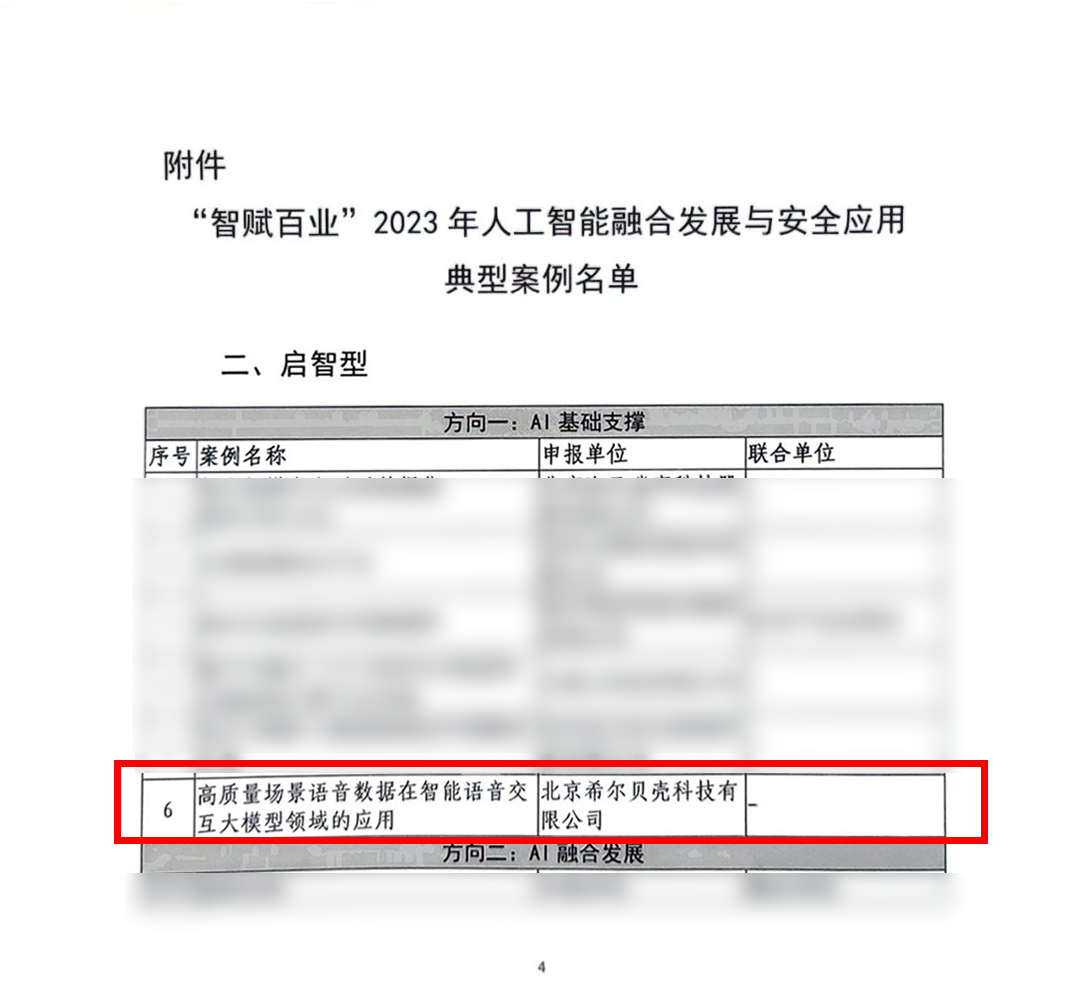
服贸会2023 | 希尔贝壳入选“智赋百业”人工智能融合发展与安全应用典型案例
9月6日,服贸会(中国国际服务贸易交易会)“2023人工智能融合发展与安全应用”论坛在国家会议中心举行,论坛由国家工业信息安全发展研究中心、世界贸易网点联盟主办,旨在促进人工智能领域贸易合作,充分发挥人…...

axios请求多个服务器
在此之前, 请求的服务器需要后端设置可跨域 此文章中主要有两种方案: const apis {api1: http://aaa.com/,api2: http://bbb.com/ }(1) 把baseURL置空不设置, 定义一个新的axios const service axios.create({timeout: 300000, // 5分钟 })把完整的url链接放入到请求中 ex…...
vs2022不能加载winform界面
今天遇到vs2022加载winform界面错误, The service ‘Microsoft.VisualStudio.Shell.Design.Serialization.DesignerDocDataService’ must be installed for this feature to work。 当前vs版本: Microsoft Visual Studio Enterprise 2022 (64 位) - Cur…...
)
NotebookLM默认α=0.05合理吗?(基于127个真实知识图谱实验的P值稳健性评估报告)
更多请点击: https://codechina.net 第一章:NotebookLM默认α0.05合理吗?(基于127个真实知识图谱实验的P值稳健性评估报告) 在NotebookLM的知识图谱推理链中,显著性阈值α被硬编码为0.05,该设定…...

观察性研究混杂偏倚控制【9天实用统计学公益训练营Day3-1】
关注公众号的朋友都知道,郑老师我之前连续4年开设了“30天学会医学统计学”,从理论到实操,一步一步教会大家统计学、SPSS课程。2026年,我们对这门课程进行全新升级!课程时间大幅度缩短,内容大幅度提升&…...

5分钟快速获取微信数据库密钥:Sharp-dumpkey完整使用指南
5分钟快速获取微信数据库密钥:Sharp-dumpkey完整使用指南 【免费下载链接】Sharp-dumpkey 基于C#实现的获取微信数据库密钥的小工具 项目地址: https://gitcode.com/gh_mirrors/sh/Sharp-dumpkey 你是否曾因为无法访问自己的微信聊天记录而感到困扰ÿ…...

OPD为何如此高效?中科大揭开参数动力学密码,后训练提速3倍
只跑到约 10% 训练进度,OPD 已能恢复约 80% 的最终推理性能,EffOPD 顺势把后训练提速到约 3 倍。虽然 LLMs 的推理能力依靠强化学习(RL)得到了大幅提升,但 RL 训练过程往往漫长、昂贵且充满试错;同时&#…...

TokUnion 技术架构解析:AI+GEO 驱动的跨境增长数据闭环设计
摘要最近这个时间段,是国货出海精细化与合规化转型背景的深度期,传统粗放式广告投放,和单一渠道运营模式面临获客成本高、ROI 不可控、数据孤岛、合规风险突出等问题。下面这个文章,我会以TokUnion数字化协同体系为研究对象&#…...

3步轻松解锁Cursor Pro:告别试用限制,永久免费享受AI编程助手
3步轻松解锁Cursor Pro:告别试用限制,永久免费享受AI编程助手 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youv…...

利用 Taotoken 用量看板精细化追踪与管理 API 成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用 Taotoken 用量看板精细化追踪与管理 API 成本 对于依赖大模型 API 进行开发的项目管理者或独立开发者而言,成本控…...
)
告别虚拟机!用WSL2自带的SSH服务连接VSCode远程开发(附端口冲突解决)
告别虚拟机!用WSL2自带的SSH服务连接VSCode远程开发(附端口冲突解决) 在Windows系统上进行Linux开发时,传统虚拟机方案往往显得笨重且资源占用高。WSL2的出现彻底改变了这一局面,它提供了近乎原生的Linux内核体验&…...

QQ音乐格式转换终极指南:如何3步将.qmc文件转为MP3/FLAC
QQ音乐格式转换终极指南:如何3步将.qmc文件转为MP3/FLAC 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder 你是否曾在QQ音乐下载了心爱的歌曲,却发现它…...

终极免费Steam创意工坊下载器:WorkshopDL完整指南
终极免费Steam创意工坊下载器:WorkshopDL完整指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你是否在Epic Games Store或GOG平台购买了游戏,却发现…...