【C++模拟实现】手撕AVL树
【C++模拟实现】手撕AVL树
目录
- 【C++模拟实现】手撕AVL树
- AVL树的介绍(百度百科)
- AVL树insert函数的实现代码
- 验证是否为AVL树
- AVL树模拟实现的要点
- 易忘点
- AVL树的旋转思路
作者:爱写代码的刚子
时间:2023.9.10
前言:本篇博客将会介绍AVL树的模拟实现(模拟AVL树的插入),以及如何去验证是否为AVL树
AVL树的介绍(百度百科)
AVL树本质上还是一棵二叉搜索树,它的特点是:
-
本身首先是一棵二叉搜索树。
-
带有平衡条件:每个结点的左右子树的高度之差的绝对值(平衡因子)最多为1。
也就是说,AVL树,本质上是带了平衡功能的二叉查找树(二叉排序树,二叉搜索树)。
AVL树insert函数的实现代码
template<class K,class V>
class AVLTreeNode
{
public:AVLTreeNode(const pair<K,V>& kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0){}AVLTreeNode* _left;AVLTreeNode* _right;AVLTreeNode* _parent;//需要设立父节点指针pair<K,V> _kv;int _bf;
};template<class K,class V>
class AVLTree
{typedef AVLTreeNode<K,V> Node;
public:AVLTree():_root(nullptr){}bool insert(const pair<K,V>& kv){if(_root==nullptr){_root=new Node(kv);return true;}else{Node* cur=_root;Node* parent=nullptr;//设计parent指针是必要的while(cur){if(cur->_kv.first>kv.first){parent=cur;cur=cur->_left;}else if(cur->_kv.first<kv.first){parent=cur;cur=cur->_right;}else{return false;}}cur=new Node(kv);//判断新加入的节点是父节点的左子树还是右子树if(parent->_kv.first>kv.first){parent->_left=cur;}else{parent->_right=cur;}cur->_parent=parent;while(parent){//及时调整父节点的平衡因子if(parent->_left==cur){--parent->_bf;}else{++parent->_bf;}if(parent->_bf==0)//当父节点的平衡因子为0时停止调整{break;}else if(parent->_bf==-1||parent->_bf==1){cur=parent;parent=parent->_parent;}else if(parent->_bf==2||parent->_bf==-2)//处理异常情况{//出现问题的情况if(parent->_bf==-2&&cur->_bf==-1){_RotateR(parent);//右单旋}else if(parent->_bf==2&&cur->_bf==1){_RotateL(parent);//左单旋}else if(parent->_bf==-2&&cur->_bf==1){ _RotateLR(parent);//左右双旋}else if(parent->_bf==2&&cur->_bf==-1){_RotateRL(parent);//右左双旋}else{assert(false);}break;}else{assert(false);}}}return true;} void _RotateR(Node* parent)//右单旋的实现{Node*cur=parent->_left;Node*curRight=cur->_right;Node*ppnode=parent->_parent;cur->_right=parent;parent->_left=curRight;if(curRight)//curRight可能是nullptr{curRight->_parent=parent;}parent->_parent=cur;//处理ppnodeif(parent==_root)//parent为头节点时需要单独处理{_root=cur;cur->_parent=nullptr;}else{if(ppnode->_left==parent){ppnode->_left=cur;}else{ppnode->_right=cur;}cur->_parent=ppnode;}parent->_bf=cur->_bf=0;}void _RotateL(Node* parent){Node* cur=parent->_right;Node* curLeft=cur->_left;Node* ppnode=parent->_parent;cur->_left=parent;parent->_right=curLeft;if(curLeft){curLeft->_parent=cur;}parent->_parent=cur;if(parent==_root){_root=cur;cur->_parent=nullptr;}else{if(ppnode->_left==parent){ppnode->_left=cur;}else{ppnode->_right=cur;}cur->_parent=ppnode;}parent->_bf=cur->_bf=0;}void _RotateLR(Node* parent){Node* cur=parent->_left;Node* curRight=cur->_right;int bf=curRight->_bf;_RotateL(cur);_RotateR(parent);//最好再处理一下平衡因子,减少耦合度if(bf==0)//单链情况下{parent->_bf=0;cur->_bf=0;curRight->_bf=0;}else if(bf==-1){parent->_bf=1;curRight->_bf=0;cur->_bf=0;}else if(bf==1){parent->_bf=-1;curRight->_bf=0;cur->_bf=0;}else{assert(false);}}void _RotateRL(Node* parent){Node* cur=parent->_right;Node* curLeft=cur->_left;int bf=curLeft->_bf;_RotateR(cur);_RotateL(parent);if(bf==0){parent->_bf=0;curLeft->_bf=0;cur->_bf=0;}else if(bf==1){parent->_bf=0;curLeft->_bf=-1;cur->_bf=0;}else if(bf==-1){parent->_bf=0;curLeft->_bf=1;cur->_bf=0;}else{assert(false);}}private:Node* _root;
};验证是否为AVL树
int _Height(Node* root){if(root==nullptr){return 0;}int leftHeight=_Height(root->_left);int rightHeight=_Height(root->_right);return leftHeight>rightHeight?leftHeight+1:rightHeight+1;}bool _Isbalance(){return _Isbalance(_root);}bool _Isbalance(Node* root){if(root==nullptr){return true;}int right=_Height(root->_right);int left=_Height(root->_left);if(root->_bf!=right-left){cout<<"平衡因子异常"<<root->_bf<<" "<<right<<" "<<left<<endl;return false;}return abs(right-left)<2&&_Isbalance(root->_left)&&_Isbalance(root->_right);}
-
根据AVL树的特性引入两个成员函数_Height函数用于计算二叉树的高度
-
以下为验证结果:

AVL树模拟实现的要点
易忘点
一定要时刻注意_parent指针的修改!尤其旋转函数中需要判断旋转后的二叉树的根节点是否还有父亲节点,如果有,需要在旋转前先保存,之后再链接上。
AVL树的旋转思路
- 新增在左,parent平衡因子减减
- 新增在右,parent平衡因子加加
- 更新后parent平衡因子 == 0,说明parent所在的子树的高度不变,不会再影响祖先,不用再继续沿着到eot的路径往上更新
- 更新后parent平衡因子 == 1 0r -1,说明parent所在的子树的高度变化,会再影响祖先,需要继续沿着到root的路径往上更新更新后
- 更新后parent平衡因子 == 2 or -2,说明parent所在的子树的高度变化且不平衡,对parent所在子树进行旋转,让他平衡
- 更到根节点,插入结束
由于AVL树画图较为麻烦,作者先不画了,可以看看其他大佬的博客,一些需要注意的地方已经写在代码注释里了,AVL树的删除之后有机会可以模拟实现一下。
AVL树的调试较为麻烦,模拟实现可以提高自己的调试能力。
相关文章:
【C++模拟实现】手撕AVL树
【C模拟实现】手撕AVL树 目录 【C模拟实现】手撕AVL树AVL树的介绍(百度百科)AVL树insert函数的实现代码验证是否为AVL树AVL树模拟实现的要点易忘点AVL树的旋转思路 作者:爱写代码的刚子 时间:2023.9.10 前言:本篇博客将…...

如何重置 docker中的mariadb的root
停止 Mariadb 容器:运行以下命令停止正在运行的 Mariadb 容器: docker stop <container_name>将 <container_name> 替换为你的 Mariadb 容器的名称或容器ID。 删除 Mariadb 容器:运行以下命令删除已停止的 Mariadb 容器&#x…...

设计模式系列-原型模式
一、上篇回顾 上篇创建者模式中,我们主要讲述了创建者的几类实现方案,和创建者模式的应用的场景和特点,创建者模式适合创建复杂的对象,并且这些对象的每 个组成部分的详细创建步骤可以是动态的变化的,但是每个对象的组…...

家用电脑可以用做服务器吗
家用电脑的结构与服务器的结构是相同的,家用电脑是可以用来搭建服务器使用。但使用家用电脑做服务器在稳定性会比服务器差很多 1.家用电脑没有公网IP,网络运营商分配的IP重启路由之后是会变化,不固定。服务器运行是需要有固定IP让人连接访问。…...

CRM软件管理系统的基本功能
CRM管理系统是企业运营的重要工具,它可以帮助企业管理客户关系,提升销售效率,大幅提高客户转化率,实现业绩增长。那么,CRM管理系统一般包含哪些功能呢?下面我们就来说说。 1、销售自动化 销售自动化顾名思…...

手机喊话应用实现思路
手机要是动一下,就喊话“摇摇零线,摇摇零线”,是不是比较酷, 这里实现一下手机翻转一下,播放声音的效果, 通过sensor识别到手机的运动状况,然后播放音频, public class MainActivi…...

【ARM CoreLink 系列 3 -- CCI-550 控制器介绍 】
文章目录 CCI FamilyCCI-550 简介CCI-550 功能CCI-550 Interfaces Snoop filter 使用背景CCI-550 Snoop filter 上篇文章:ARM CoreLink 系列 2 – CCI-400 控制器简介 CCI Family CCI-550 简介 Arm CoreLink CCI-550 Cache Coherent Interconnect 扩展了 CoreLink…...

最长递增子序列 -- 动规
300. 最长递增子序列 注意「⼦序列」和「⼦串」的区别,⼦串⼀定是连续的,⽽⼦序列不⼀定是连续的。 class LengthOfLIS:"""300. 最长递增子序列https://leetcode.cn/problems/longest-increasing-subsequence/description/""&q…...

linux 进程管理命令
进程管理命令 查看进程命令 ps命令 显示系统上运行的进程列表 # 查看系统中所有正在运行的系统ps aux# 获取占用内存资源最多的10个进程,可以使用如下命令组合:ps aux|head -1;ps aux|grep -v PID|sort -rn -k 4|head# 获取占用CPU资源最多的10个进程&am…...

第一章:计算机网络和因特网
什么是因特网 具体构成描述 互联网是一个世界范围的计算机网络,即一个互联了遍及世界数十亿计算机设备的网络,这些被连接的设备被称为主机或者端系统。端系统通过通信链路(communication link)和分组交换机(packet s…...
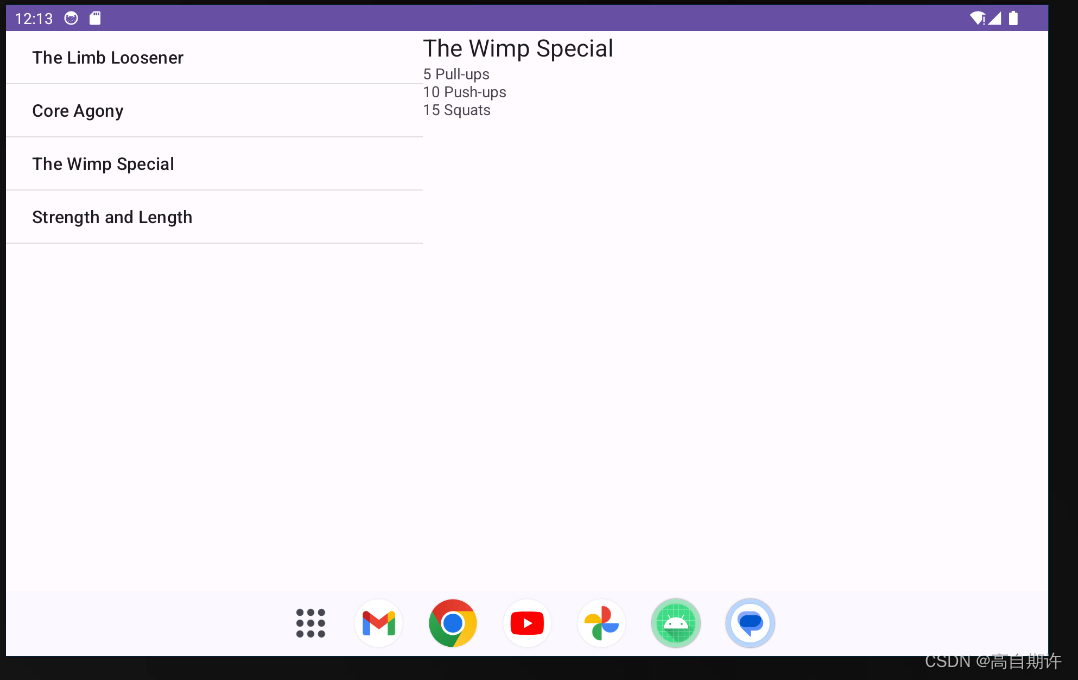
Android后退堆栈
修改代码 现在的ItemClick使得用户单击其中一个项目时就会跳转,现在要修改其使得在一个小屏幕设备上才会这样做,在一个大屏幕设备上运行用户选择一个训练项目时在右边的片段显示响应的信息。 希望片段处理后退的方式:假设用户在手机上运行这…...
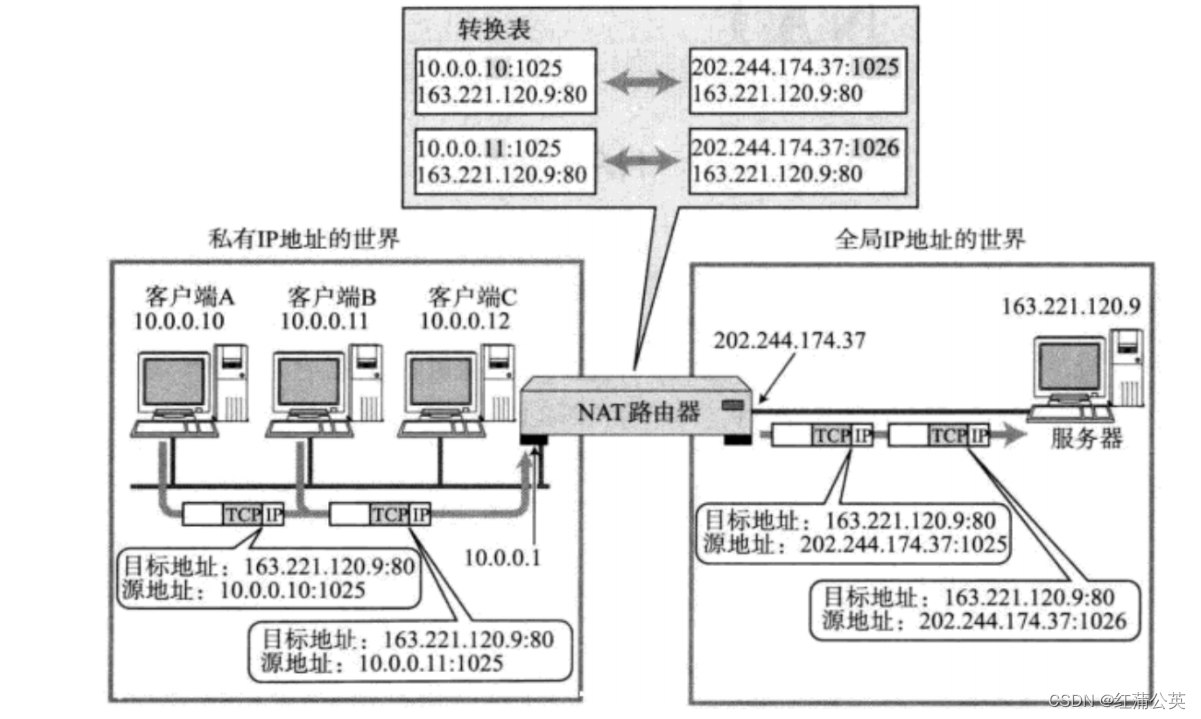
网络原理(一)网络基础,包括IP ,网络相关的定义
网络基础,包括IP ,网络相关的定义 网络基础冲突域广播域DNSNATNAPT 网络基础 以下图片是书上的网图。 什么是IP地址? IP地址(Internet Protocol Address)是指互联网协议地址,又译为网际协议地址。P地址是…...

Python语义分割与街景识别(2):环境搭建
前言 本文主要用于记录我在使用python做图像识别语义分割训练集的过程,由于在这一过程中踩坑排除BUG过多,因此也希望想做这部分内容的同学们可以少走些弯路。 本文是python语义分割与街景识别的第二篇,关于环境搭建的内容。这个部分是整个流…...
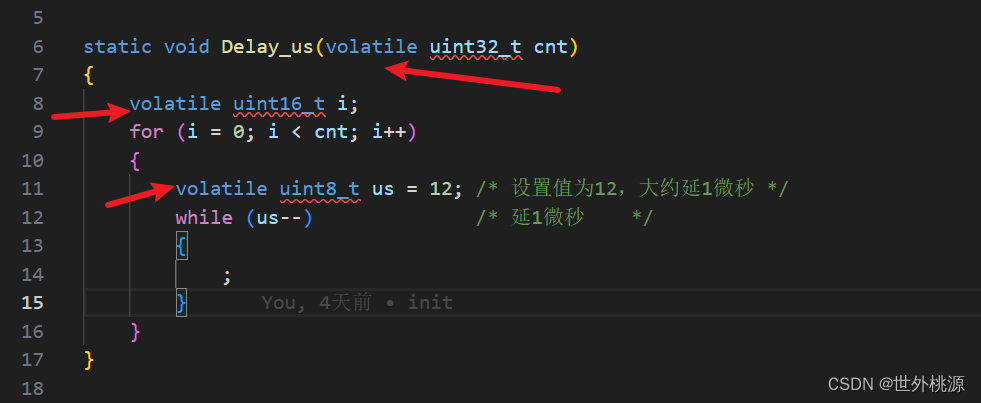
stm32(GD32,apm32),开优化后需要特别注意的地方
提到优化就不得不提及 volatile 使用场景 1:中断服务程序中修改的供其它程序检测的变量,需要加volatile; : 2:多任务环境下各任务间共享的标志,应该加volatile; 3:并行设备的硬件寄存器&#x…...
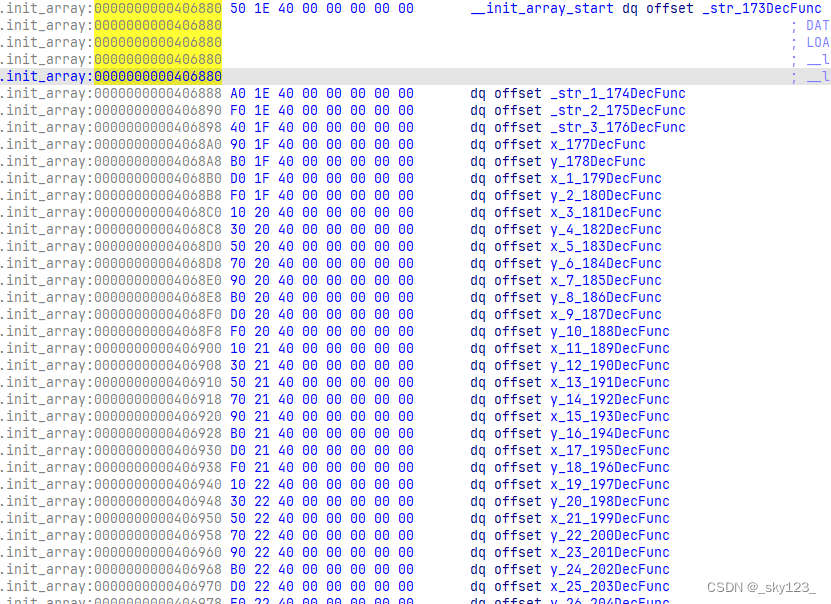
LLVM 与代码混淆技术
项目源码 什么是 LLVM LLVM 计划启动于2000年,开始由美国 UIUC 大学的 Chris Lattner 博士主持开展,后来 Apple 也加入其中。最初的目的是开发一套提供中间代码和编译基础设施的虚拟系统。 LLVM 命名最早源自于底层虚拟机(Low Level Virtu…...

R语言---使用runway进行机器学习模型性能的比较
R语言—使用runway进行机器学习模型性能的比较 #dataloadrm(list=ls())#librarylibrary(dcurves)library(gtsummary)library(tidyverse)library(mlr3verse)library(tidyverse)library(data.table)</...

C++斩题录|递归专题 | leetcode50. Pow(x, n)
个人主页:平行线也会相交 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 平行线也会相交 原创 收录于专栏【手撕算法系列专栏】【LeetCode】 🍔本专栏旨在提高自己算法能力的同时,记录一下自己的学习过程,希望…...

详解Redis之Lettuce实战
摘要 是 Redis 的一款高级 Java 客户端,已成为 SpringBoot 2.0 版本默认的 redis 客户端。Lettuce 后起之秀,不仅功能丰富,提供了很多新的功能特性,比如异步操作、响应式编程等,还解决了 Jedis 中线程不安全的问题。 …...

【3】单着色器文件读取
Basic.shader文件,可以发现顶点着色器和片段着色器是写在一个文件里的,这里我们将他们读取出来,而不是上一篇使用string的方式。 #shader vertex #version 330 corelayout(location 0) in vec4 position;void main() {gl_Position positio…...
祝贺埃文科技入选河南省工业企业数据安全技术支撑单位
近日,河南省工业信息安全产业发展联盟公布了河南省工业信息安全应急服务支撑单位和河南省工业企业数据安全技术支撑单位遴选结果,最终评选出19家单位作为第一届河南省工业信息安全应急服务支撑单位和河南省工业企业数据安全技术支撑单位。 埃文科技凭借自身技术优势…...

基于Kubernetes Lease构建分布式部署锁:解决CI/CD环境下的资源竞争
1. 项目概述:从“clawfight”看一场被遗忘的社区技术博弈看到“2019-02-18/clawfight”这个标题,很多人的第一反应可能是困惑。它不像一个标准的软件项目名,没有清晰的版本号,也没有指明具体的技术栈。但恰恰是这种看似随意的命名…...

基于MCP与Apify构建AI驱动的投资另类数据研究工具
1. 项目概述:当投资研究遇上AI代理如果你是一名量化研究员、对冲基金分析师,或者只是一个对金融市场充满好奇、希望用数据驱动决策的独立投资者,那么你肯定对“另类数据”这个词不陌生。传统的财报、股价、宏观经济指标,这些“传统…...

基于CircuitPython与加速度计的魔法9号球:嵌入式交互项目实践
1. 项目概述:当硬件遇上玄学,用代码打造你的专属“决策神器”在嵌入式开发的世界里,我们常常与传感器、显示屏和逻辑代码打交道,构建着一个个解决实际问题的智能设备。但谁说硬件项目就一定要严肃刻板?今天,…...

MedAgentBench:大模型临床决策能力评估基准详解与应用
1. 项目概述:当大模型成为医疗决策的“实习生” 最近在医疗AI的圈子里,一个名为“MedAgentBench”的开源项目引起了不小的讨论。这个由斯坦福机器学习组(Stanford ML Group)发布的项目,其核心目标非常明确:…...

量子误差缓解:Bhattacharyya距离与保形预测的应用
1. 量子噪声与误差缓解的核心挑战在当前的NISQ(Noisy Intermediate-Scale Quantum)时代,量子计算机面临的最大障碍就是噪声和误差问题。这些噪声主要来源于量子比特与环境之间的相互作用、门操作的不完美性以及测量误差等。以一个典型的超导量…...

RTX 5090功耗600W:高功耗显卡的系统级挑战与实战装机指南
1. 项目概述:从一则功耗新闻到显卡生态的深度解构最近,一则关于英伟达下一代旗舰显卡RTX 5090功耗可能高达600W的消息,在硬件圈和AI计算领域激起了不小的波澜。对于普通玩家而言,这或许只是一个“电老虎”又升级了的谈资ÿ…...

AI Agent无障碍审查:自动化集成WCAG标准与axe-core实践
1. 项目概述:一个为AI助手打造的“无障碍”审查官最近在折腾AI应用开发,特别是那些能自动处理任务的智能体(AI Agent),发现一个挺有意思但容易被忽略的问题:我们费尽心思让AI能写代码、分析数据、生成报告&…...

SQL学习指南——背景知识
关系型数据库中每个数据表都包含能够唯一标识某一行的信息(称为主键 primary key),以及完整描述实体所需的额外信息 一些数据表中还包含了导航到其他数据表的信息,这些列称为外键(foreign key) 术语术语定义实体数据库…...

低多边形风出图总显廉价?揭秘Midjourney v6中--stylize、--polarize与--no纹理干扰的黄金配比公式
更多请点击: https://intelliparadigm.com 第一章:低多边形风出图的视觉认知陷阱与Midjourney v6风格断层解析 低多边形(Low-Poly)风格在AI图像生成中常被误认为“简约即可控”,实则构成一类典型的视觉认知陷阱&#…...

PPO 原理与应用
1. PPO 在 RLHF 里到底是干什么的? 在 RLHF 里,我们通常已经有了一个经过 SFT 的模型。这个模型已经比较会回答问题了,但还不一定最符合人类偏好。 于是我们再训练一个 奖励模型 Reward Model,让它模仿人类判断: 这个回…...