[X3m]ros交叉编译
ros需要安装以下包
PYTHON_PACKAGE_LIST="lark lark-parser netifaces pyyaml ifcfg pyunicodedata "
TogetheROS.Bot | TogetheROS.Bot用户手册
编译tros.b
1 使用docker文件
该部分操作均在开发机的docker内完成。
## 创建目录
cd /mnt/data/kairui.wang/test
mkdir -p cc_ws/tros_ws/src
## 获取交叉编译用docker
wget http://archive.sunrisepi.tech/TogetheROS/cross_compile_docker/pc_tros_v1.0.5.tar.gz
## 加载docker镜像
sudo docker load --input pc_tros_v1.0.5.tar.gz
## 查看pc_tros对应的image ID
sudo docker images
## 启动docker挂载目录
sudo docker run -it --entrypoint="/bin/bash" -v PC本地目录:docker目录 imageID,这里以 sudo docker run -it --entrypoint="/bin/bash" -v /mnt/data/kairui.wang/test:/mnt/test 9c2ca340973e 为例2 获取tros.b源码
该部分操作均在开发机的docker内完成。
这里以docker中/mnt/test目录为例。
cd /mnt/test/cc_ws/tros_ws
## 获取配置文件
git clone https://github.com/HorizonRDK/robot_dev_config.git -b develop
## 执行cd robot_dev_config,使用 git tag --list 命令查看可用的发布版本
## 使用 git reset --hard [tag号] 命令指定发布版本。详细说明参考本页面 编译指定版本tros.b 内容
## 拉取代码
vcs-import src < ./robot_dev_config/ros2_release.repos 整个工程目录结构如下
├── cc_ws
│ ├── sysroot_docker
│ │ ├── etc
│ │ ├── lib -> usr/lib
│ │ ├── opt
│ │ └── usr
│ └── tros_ws
│ ├── robot_dev_config
│ └── src其中tros_ws/robot_dev_config路径包含代码拉取、编译、打包等功能所需要的配置、脚本文件;tros_ws/src路径存放拉取的代码;sysroot_docker路径包含交叉编译依赖的头文件和库,和地平线RDK的/目录对应。例如媒体库在sysroot_docker中的路径为sysroot_docker/usr/lib/hbmedia/,在地平线RDK中的路径为/usr/lib/hbmedia/。
编译时,在robot_dev_config/aarch64_toolchainfile.cmake编译脚本中通过CMAKE_SYSROOT宏指定sysroot_docker的安装路径。
3 交叉编译
该部分操作均在开发机的docker内完成。
## 拷贝create_soft_link.py
mkdir -p install && cp ./robot_dev_config/create_soft_link.py install/## 使用build.sh编译X3版本tros.b
bash ./robot_dev_config/build.sh -p X3## 使用build.sh编译RDK Ultra版本tros.b
bash ./robot_dev_config/build.sh -p Rdkultra编译成功后会提示总计N packages编译通过。
若使用minimal_build.sh进行最小化编译,还可通过执行./minimal_deploy.sh -d “install_path”,进一步压缩部署包大小。
安装tros.b
将编译生成的install目录拷贝至地平线RDK中并重命名为tros,这里我们将部署包放在/opt/tros目录下与deb安装目录保持一致
编译指定版本tros.b
在本章节编译tros.b小节第2步获取tros.b源码中,默认是获取的最新版本tros.b源码。如果需要获取某个指定发布版本源码,该步骤需要做如下修改
## 获取配置文件
git clone https://github.com/HorizonRDK/robot_dev_config.git -b develop
cd robot_dev_config
## 查看可用的发布版本
git tag --list
## 切换至指定版本号,这里以tros.b 2.0.0为例
git reset --hard tros_2.0.0
cd ..
## 拉取代码
vcs-import src < ./robot_dev_config/ros2_release.repos相关文章:

[X3m]ros交叉编译
ros需要安装以下包 PYTHON_PACKAGE_LIST"lark lark-parser netifaces pyyaml ifcfg pyunicodedata " TogetheROS.Bot | TogetheROS.Bot用户手册 编译tros.b 1 使用docker文件 该部分操作均在开发机的docker内完成。 ## 创建目录 cd /mnt/data/kairui.wang/…...
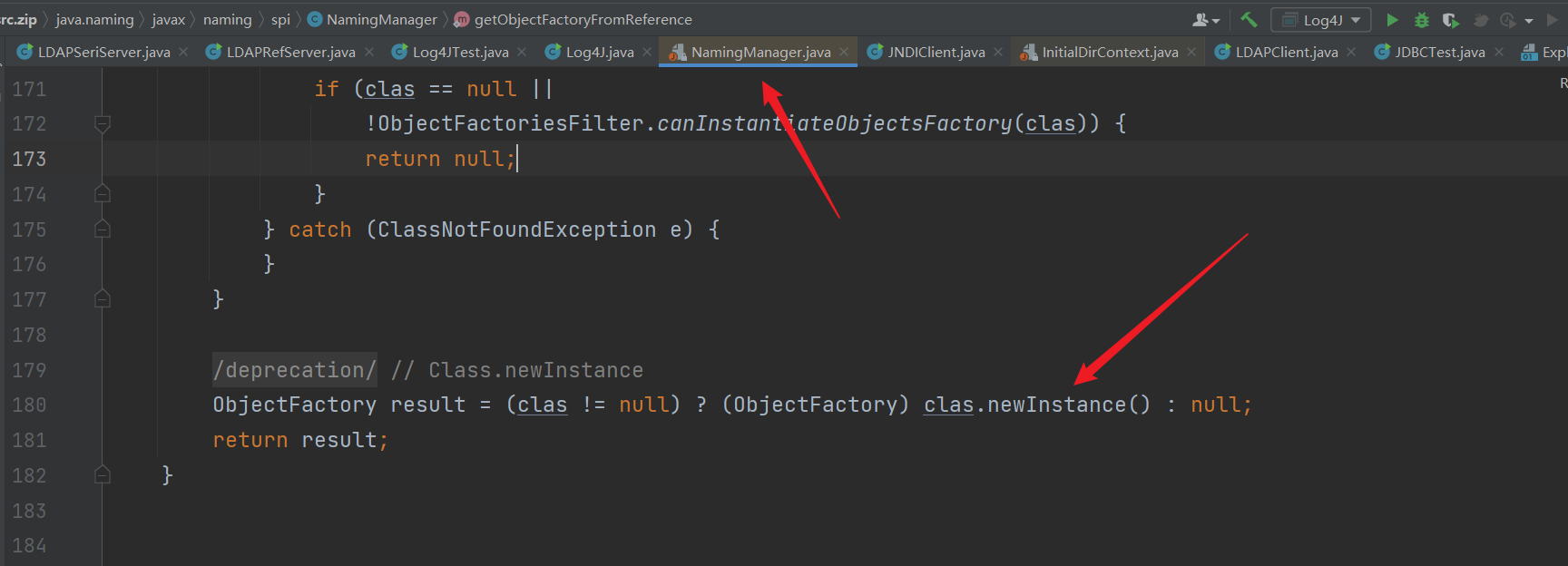
【漏洞库】Fastjson_1.2.47_rce
文章目录 漏洞描述漏洞编号漏洞评级影响版本漏洞复现- 利用工具- 漏洞环境- 漏洞扫描- 漏洞验证- 深度利用- GetShell- EXP 编写 漏洞挖掘- 寻找入口点- 指纹信息 修复建议- 漏洞修复 漏洞原理 漏洞描述 Fastjson是阿里巴巴公司开源的一款json解析器,其性能优越&am…...
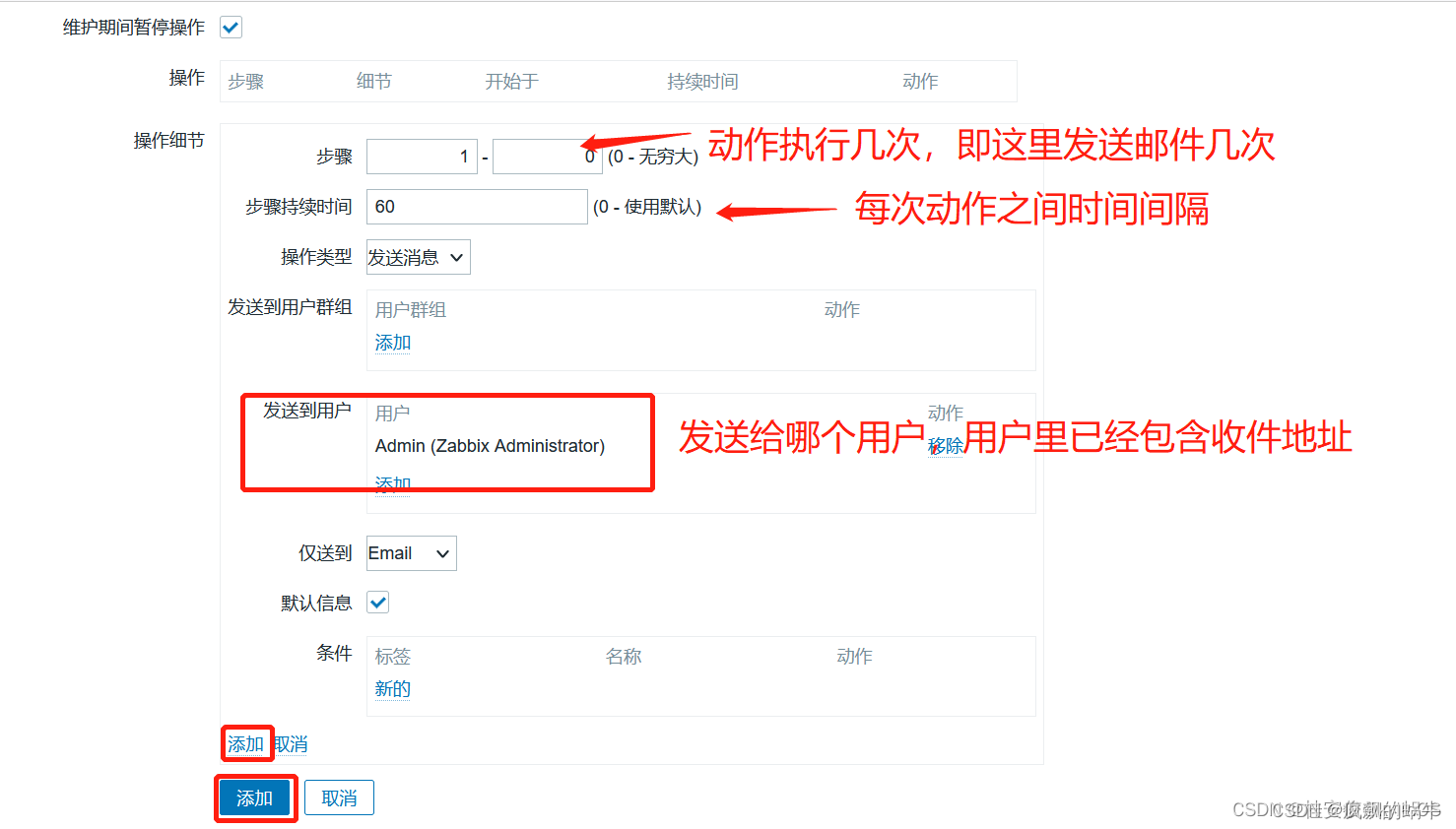
zabbix 钉钉微信企微告警(动作操作消息内容模板)
一、环境配置 1、配置zabbix服务端 2、配置监控主机&监控项&监控模板 zabbix配置安装_this page is used to test the proper operation of _疯飙的蜗牛的博客-CSDN博客 二、触发器 触发器的本质就是一个条件判断,对于不同的监控数据来说,我…...

阿里云国际站云服务器数据备份方法有哪些?
阿里云国际站云服务器是一种根据云计算技术的虚拟服务器,它能够经过互联网提供计算资源和服务。在运用云服务器的过程中,数据备份是非常重要的一个环节。本文将介绍云服务器数据备份的办法,包含手动备份、主动备份和数据同步。 一、手动备份 …...

游戏笔记本电脑可以进行 3D 建模和渲染吗?有哪些优势与缺点?
3D 建模和渲染是创建令人惊叹的数字艺术、动画和游戏体验的最流行和最广泛使用的工具之一。随着技术的进步,对运行这些模型的强大计算机的需求呈指数级增长。对于那些寻求强大机器来处理 3D 建模任务的人来说,游戏笔记本电脑已成为一个可行的选择。 游戏…...

【AI】推理系统和推理引擎的整体架构
本文主要是对 B 站 Up 主 ZOMI酱 推理系统系列视频 的理解,可以认为是重点笔记。 一、深度学习模型的全生命周期 相信很多人和我一样,刚看到深度学习模型中的推理系统或推理引擎时是一头雾水,因为学习 DL 时通常关注于模型的设计和训练。下图…...

k8s集群中流水线部署微服务
k8s集群中流水线发布微服务 一、流水线部署微服务部署流程 二、微服务发布流程 pipeline {agent {node {label maven}}parameters {string(name: PROJECT_VERSION, defaultValue: v1.0, description: )string(name: PROJECT_NAME, defaultValue: , description: )}environment…...

Socks5代理与网络安全:保护您的隐私与数据
在今天数字化的世界中,隐私和网络安全已经成为至关重要的话题。Socks5代理作为一种强大的工具,不仅为用户提供了隐私保护,还在网络安全和爬虫领域发挥着关键作用。本文将深入探讨Socks5代理的工作原理、其在网络安全中的应用,以及…...

2024年山东高企申报注意事项
1、分析企业技术及财务报表 分析财务数据及企业主营产品和技术点。用以确定申报材料的撰写方向。一般耗时1周左右。(纺织厂、服装厂等传统行业面临申报中的面临研发人员比例不达标,研发费用不达标,高新技术产品比例不达标等难题。)…...
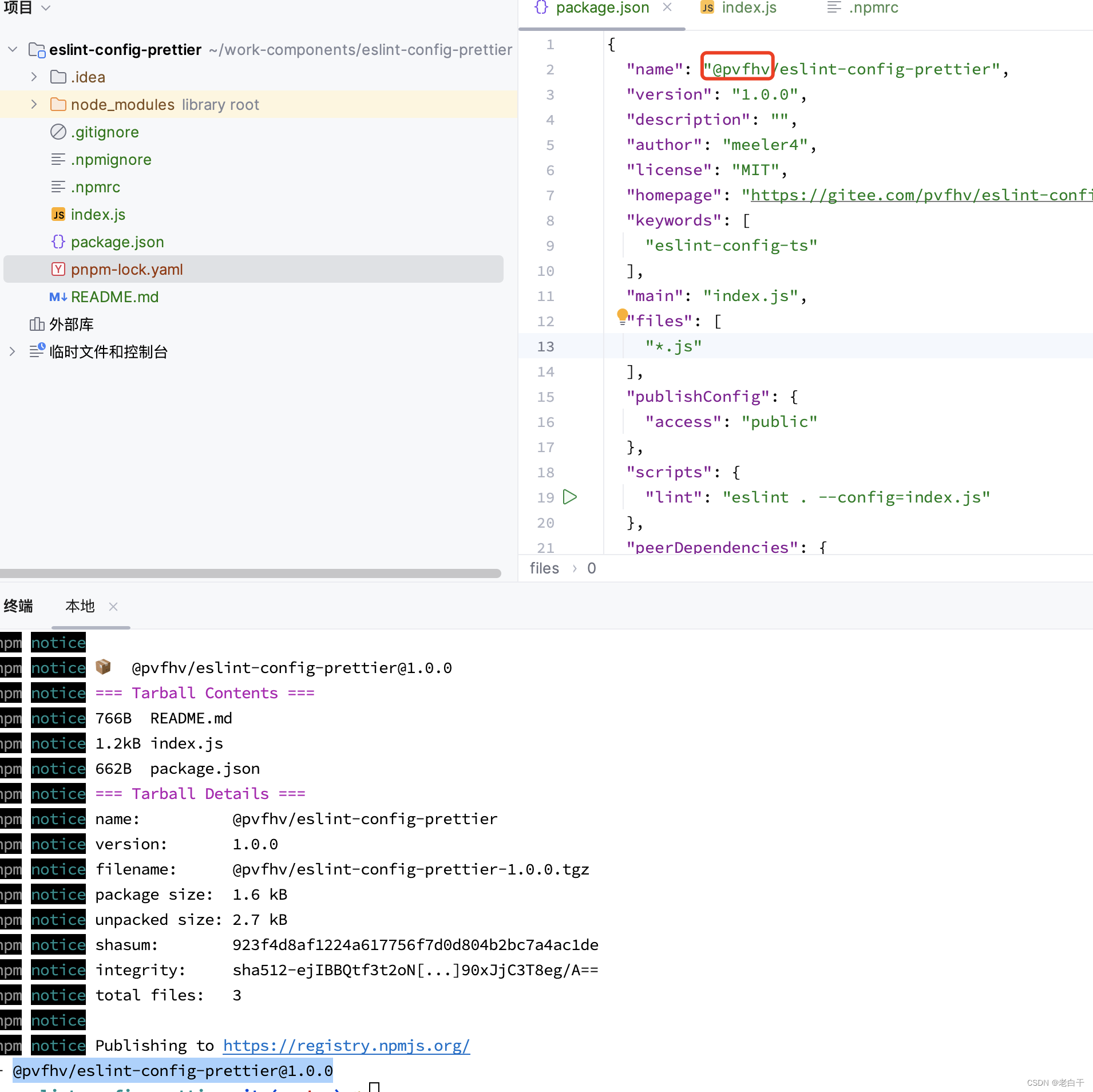
npm publish包报404,is not in the npm registry错误
1. 指定发布目标2. 登录npm,使用登录名发布包,包名命名原则“登录名/包名”,或 “包名” 3. 删除某一个版本npm unpublish pvfhv/eslint-config-prettier1.0.1 --force 删除后的版本不能重复使用,正式解释: Unfortun…...

pytest-基础
一.使用pytest,默认的测试用例的规则以及基础应用 1.模块名字必须已test_开头或者_test结尾 2.测试类必须以Test开头,并且不能有init方法 3.测试方法必须以test开头 示例代码 test_001.py import pytest class TestCase:def test_case(self):print("执行测试用例&quo…...

在openSUSE上开启护眼模式
色温 色温是用来衡量光源色彩时所用到的一个概念,单位为开尔文。热黑体辐射体与光源温度相同时的温度,就是该光源的色温。 显而易见,色温越低时,光源看起来越黄;色温越高时,光源看起来越蓝。下面是一些常见…...
vue基础知识十:Vue中组件和插件有什么区别?
一、组件是什么 回顾以前对组件的定义: 组件就是把图形、非图形的各种逻辑均抽象为一个统一的概念(组件)来实现开发的模式,在Vue中每一个.vue文件都可以视为一个组件 组件的优势 降低整个系统的耦合度,在保持接口不…...

Arthas是一个Java诊断工具 的入门使用
Arthas是一个Java诊断工具,可以帮助开发人员在运行时快速诊断和解决线上应用故障。 以下是Arthas的入门步骤: 安装Arthas 你可以在Arthas Github页面中找到安装指南,根据操作系统选择相应的安装方式。 启动Arthas 在安装完成后ÿ…...

数据结构——排序算法——桶排序
桶排序的思想是: 1.将区间划分为 n 个相同大小的子区间,每个子区间称为一个桶 2.遍历数组,将每个数字装入桶中 3.对每个桶内的数字单独排序,这里需要采用其他排序算法,如插入、归并、快排等 4.最后按照顺序将所有桶内的…...

Kafka消息发送可靠性分析
Apache Kafka是一种高吞吐量的分布式发布订阅消息系统,它可以处理消费者和生产者之间的所有实时数据。Kafka的主要特性包括:高吞吐量、可扩展性、持久性、分布式、可容错等。这些特性使得Kafka成为大规模数据处理和实时数据分析的理想选择。然而…...

如何将一个字符串转换为驼峰命名法(camel case)?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ 思路⭐ 示例⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那些对Web开发感兴趣、刚刚踏入前端领…...

牛客网项目-第一章-笔记
牛客网项目-第一章 环境配置 java maven idea Spring Intializr 搜索jar包的网站:https://mvnrepository.com/ https://start.spring.io/ 缺少的aop包,手动在pom.xml中加入依赖 <dependency><groupId>org.springframework.boot</gro…...

CISP汇总
0x00 前言 CTF 加解密合集CTF Web合集网络安全知识库溯源相关 文中工具皆可关注 皓月当空w 公众号 发送关键字 工具 获取 本文用来整理相关CISP知识笔记 0x01 汇总...
模块的使用)
KALILINUX MSF中kiwi(mimikatz)模块的使用
一、简介: kiwi模块: mimikatz模块已经合并为kiwi模块;使用kiwi模块需要system权限,所以我们在使用该模块之前需要将当前MSF中的shell提升为system。 二、前权: 提权到system权限: 1.1 提到system有…...

终极指南:如何用UMA模型快速预测催化吸附能,节省90%计算时间
终极指南:如何用UMA模型快速预测催化吸附能,节省90%计算时间 【免费下载链接】ocp Open Catalyst Projects library of machine learning methods for catalysis 项目地址: https://gitcode.com/GitHub_Trending/oc/ocp 在催化材料研究中&#x…...
)
保姆级教程:用PyTorch 1.13+Win11搞定MSTAR数据集分类(附完整代码)
从零实现MSTAR数据集分类:PyTorch全卷积网络实战指南 1. 环境配置与工具准备 在Windows 11系统上搭建PyTorch开发环境需要特别注意版本兼容性问题。以下是经过验证的稳定组合: PyTorch 1.13.0 CUDA 11.6 cuDNN 8.3.2Python 3.8-3.10(推荐…...
)
Harmonyos应用实例233:数独逻辑教练 (综合与实践)
5. 数独逻辑教练 (综合与实践) 功能介绍: 提供一个 4x4 或 6x6 的入门级数独游戏,专为训练逻辑推理设计。系统随机生成题目,用户点击格子填入数字。如果填入错误,系统会给予红色高亮提示。包含“提示”功能,自动填入一个正确数字,帮助学生理解排除法和唯一性原理。 //…...

HoloPart:当3D模型学会自我解剖,深度学习的“X光眼“如何看透一切
HoloPart:当3D模型学会自我解剖,深度学习的"X光眼"如何看透一切 【免费下载链接】HoloPart Generative 3D Part Amodal Segmentation 项目地址: https://gitcode.com/gh_mirrors/ho/HoloPart 你是否曾对着一个复杂的3D模型感到困惑——…...

Stable-Diffusion-v1-5-Archive 插件生态入门:十大必备插件安装与使用指南
Stable-Diffusion-v1-5-Archive 插件生态入门:十大必备插件安装与使用指南 刚开始接触 Stable-Diffusion-v1-5-Archive 时,你可能觉得它功能已经很强大了。但用久了就会发现,社区里那些大神们开发的插件,才是真正把创作效率提升到…...

VDisk技术详解:原理、应用与优化实践指南
VDisk技术详解:原理、应用与优化实践指南传统的桌面运维管理面临效率和成本控制的双重挑战,例如操作系统和应用部署繁琐、维护更新困难、资源利用率低等。VDisk(虚拟磁盘)技术通过将操作系统、应用程序和用户数据集中存储在服务器…...

AI 模型推理性能瓶颈与优化方向
AI模型推理性能瓶颈与优化方向 随着AI技术在各行业的广泛应用,模型推理性能成为影响落地效果的关键因素。无论是实时交互场景还是大规模数据处理,推理效率直接决定了用户体验和成本控制。受限于计算资源、算法复杂度及硬件适配性等因素,AI模…...
)
Vant4移动端电商实战:用Card和Cell组件打造订单详情页(附完整代码)
Vant4移动端电商实战:用Card和Cell组件打造订单详情页(附完整代码) 在移动电商应用开发中,订单详情页是用户查看购买信息的重要界面。Vant4作为轻量、可靠的移动端组件库,其Card和Cell组件能够快速构建清晰、美观的订单…...

告别‘OSError‘:手把手教你为transformers库设置离线/代理模式,稳定加载预训练模型
构建稳定高效的Hugging Face模型加载环境:从原理到实践 当你在深夜赶项目进度时,突然遇到那个令人窒息的红色报错——"OSError: Couldnt connect to https://huggingface.co",这感觉就像在马拉松终点线前被绊倒。作为现代NLP开发的…...
)
零成本体验软路由:京东云AX1800 Pro刷iStoreOS OpenWrt的完整教程(含空间扩容技巧)
京东云AX1800 Pro软路由改造全指南:从刷机到空间优化的实战手册 在智能家居和高速网络需求激增的今天,一台性能出色的路由器已成为家庭数字生活的核心枢纽。京东云AX1800 Pro作为一款性价比极高的Wi-Fi 6路由器,其硬件配置远超同价位产品——…...