games101 作业2
题目
光栅化一个三角形
1. 创建三角形的 2 维 bounding box。
2. 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中心的屏幕空间坐标来检查中心点是否在三角形内。
3. 如果在内部,则将其位置处的插值深度值 (interpolated depth value) 与深度缓冲区 (depth buffer) 中的相应值进行比较。
4. 如果当前点更靠近相机,请设置像素颜色并更新深度缓冲区 (depth buffer)。
题解
本次作业需要实现代码框架中的两个接口:
void rst::rasterizer::rasterize_triangle(const Triangle& t);
static bool insideTriangle(int x, int y, const Vector3f* _v);
1. 在2D空间中,计算一个三角形的轴对称boundbox
只需要计算出三角形的三个顶点坐标中,x最大最小值,y最大最小值。即 ( x m i n , y m i n ) , ( x m a x , y m a x ) (x_{min},y_{min}),(x_{max},y_{max}) (xmin,ymin),(xmax,ymax)
使用<math.h>库实现如下:
int xMin, yMin, xMax, yMax;xMin = std::floor(std::min(std::min(v[0].x(),v[1].x()),v[2].x()));yMin = std::floor(std::min(std::min(v[0].y(), v[1].y()), v[2].y()));xMax = std::ceil(std::max(std::max(v[0].x(), v[1].x()), v[2].x()));yMax = std::ceil(std::max(std::max(v[0].y(), v[1].y()), v[2].y()));
注意:顶点坐标都是浮点数,但是我们计算出的包围盒必须是整型。左上角下取整,右下角上去整。
2. 判断像素的中心点是否在三角形内部
其实方法有很多种,具体可以参考这个博客。
最常用最高效的有两种:重心坐标法和向量叉积。
本次作业选用向量叉积法:
代码如下
static bool insideTriangle(int x, int y, const Vector3f* _v)
{ // TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]auto v0_v1 = _v[1] - _v[0];auto v1_v2 = _v[2] - _v[1];auto v2_v0 = _v[0] - _v[2];auto v0_P = Vector3f(x, y, _v[0].z()) - _v[0];auto v1_P = Vector3f(x, y, _v[1].z()) - _v[1];auto v2_P = Vector3f(x, y, _v[2].z()) - _v[2];auto v0pCross = v0_v1.cross(v0_P);auto v1pCross = v1_v2.cross(v1_P);auto v2pCross = v2_v0.cross(v2_P);if (v0pCross.dot(v1pCross) >= 0 && v0pCross.dot(v2pCross) >= 0)return true;return false;
}
因为我们判断的是一个像素的中心点是否在三角形内部,所以需要给x,y 分别加0.5,即insideTriangle(x+0.5,y+0.5,t.v)
注意:Vector3f Triangle::v[3] 中存放的就是三角形的三个顶点。
3.根据插值得到的深度值和深度缓冲的深度值比较。
插值运算使用代码框架,所以这块比较简单。
代码如下
for (int i = xMin; i <= xMax; i++){for (int j = yMin; j <= yMax; j++){if (insideTriangle(i+0.5f, j+0.5f,t.v)){auto[alpha, beta, gamma] = computeBarycentric2D(i, j, t.v);float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();z_interpolated *= w_reciprocal;int index = get_index(i, j);if (depth_buf[index] > z_interpolated){depth_buf[index] = z_interpolated; // 更新深度缓冲区set_pixel(Vector3f(i,j,z_interpolated),t.getColor());}}}}
注意:如果当前z值小于深度缓冲区的深度值,一定要更新深度缓冲区。
结果
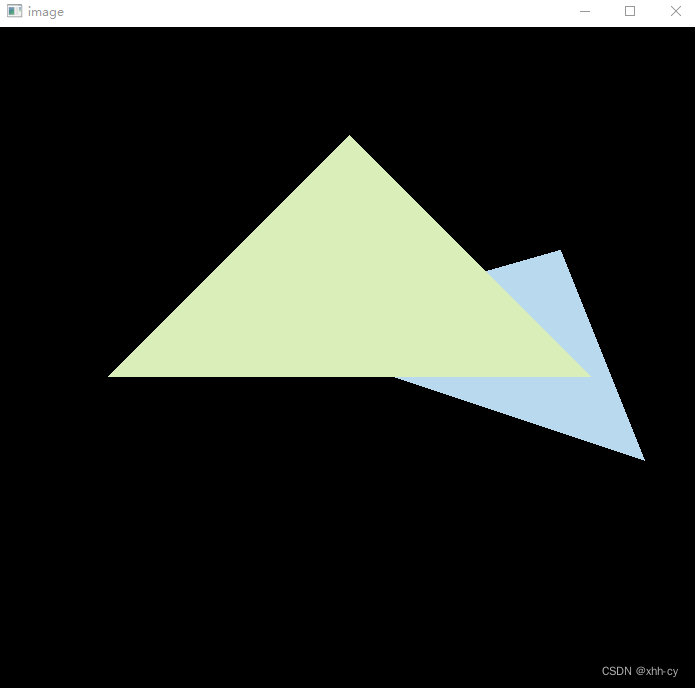
代码:
static bool insideTriangle(int x, int y, const Vector3f* _v)
{ // TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]auto v0_v1 = _v[1] - _v[0];auto v1_v2 = _v[2] - _v[1];auto v2_v0 = _v[0] - _v[2];auto v0_P = Vector3f(x, y, _v[0].z()) - _v[0];auto v1_P = Vector3f(x, y, _v[1].z()) - _v[1];auto v2_P = Vector3f(x, y, _v[2].z()) - _v[2];auto v0pCross = v0_v1.cross(v0_P);auto v1pCross = v1_v2.cross(v1_P);auto v2pCross = v2_v0.cross(v2_P);if (v0pCross.dot(v1pCross) >= 0 && v0pCross.dot(v2pCross) >= 0)return true;return false;
}void rst::rasterizer::rasterize_triangle(const Triangle& t) {auto v = t.toVector4();int xMin, yMin, xMax, yMax;xMin = std::floor(std::min(std::min(v[0].x(),v[1].x()),v[2].x()));yMin = std::floor(std::min(std::min(v[0].y(), v[1].y()), v[2].y()));xMax = std::ceil(std::max(std::max(v[0].x(), v[1].x()), v[2].x()));yMax = std::ceil(std::max(std::max(v[0].y(), v[1].y()), v[2].y()));for (int i = xMin; i <= xMax; i++){for (int j = yMin; j <= yMax; j++){if (insideTriangle(i+0.5f, j+0.5f,t.v)){auto[alpha, beta, gamma] = computeBarycentric2D(i, j, t.v);float w_reciprocal = 1.0/(alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());float z_interpolated = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();z_interpolated *= w_reciprocal;int index = get_index(i, j);if (depth_buf[index] > z_interpolated){depth_buf[index] = z_interpolated;set_pixel(Vector3f(i,j, z_interpolated),t.getColor());}}}}
}参考文献
判断点是否在三角形内
相关文章:
games101 作业2
题目 光栅化一个三角形 1. 创建三角形的 2 维 bounding box。 2. 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中心的屏幕空间坐标来检查中心点是否在三角形内。 3. 如果在内部,则将其位置处的插值深度值 (…...

二叉树链式存储结构
目录 1.二叉树链式存储结构 2.二叉树的遍历 2.1 前、中、后序遍历 2.2 层序遍历 3.二叉树的其他递归问题 3.1 二叉树的结点个数 3.2 二叉树的叶子结点个数 3.3 二叉树第k层结点个数 3.4 二叉树的深度 3.5 二叉树查找 3.6 二叉树销毁 4.二叉树的基础OJ题 4.1 单值…...

Claude 使用指南 | 可与GPT-4媲美的语言模型
本文全程干货,让你轻松使用上claude,这也是目前体验cluade的唯一途径!废话不多说,直接上教程,cluade的能力不逊于GPT4,号称是ChatGPT4.0最强竞品。相对Chatgpt来说,Claude不仅是完全免费的&…...

【汇编】微处理器
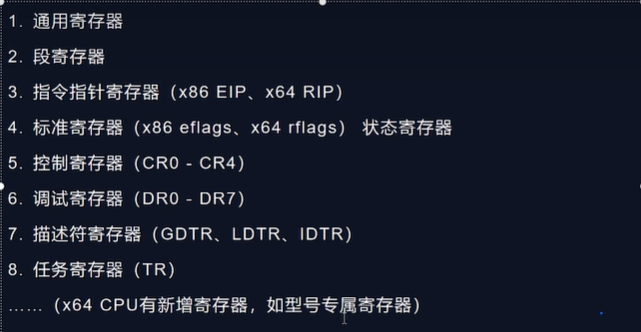
【汇编】微处理器 文章目录 【汇编】微处理器1、微处理器概念1.1 关键词1.2 分类 2、微处理器结构2.1 寄存器2.2 寄存器&汇编助记符2.3 寄存器组成结构 3、地址空间3.1 存储空间3.1.1 虚拟空间(编程空间)3.1.2 线性空间 3.2 I/O空间 4、工作模式4.1 …...
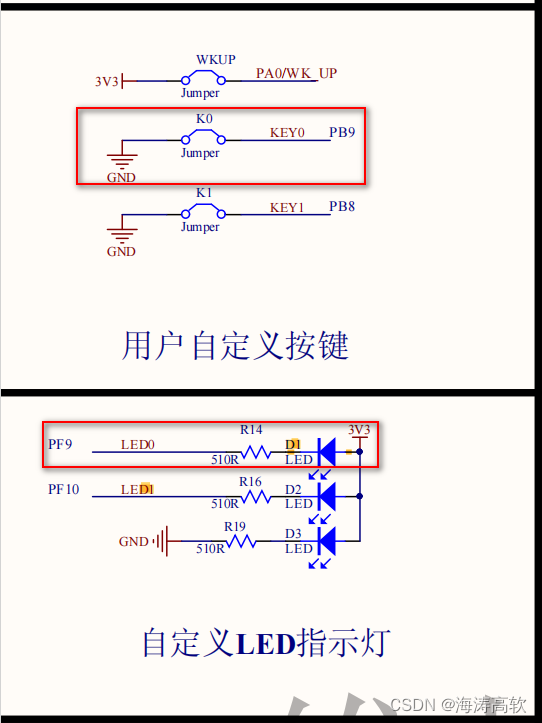
按键点亮led灯
原理图: K0这个按键按下时,开发板D1这个灯亮,松开,灯灭 代码如下: #include "stm32f4xx.h" void LED_Init(void) {//1.定义一个GPIO外设的结构体变量 GPIO_InitTypeDef GPIO_InitStructure;//RCC_AHB1PeriphClockCmd(RCC_AHB1Pe…...

Java常见面试题
目录 1、mysql并发事务会带来哪些问题,如何解决?2、请详细描述Redis持久化机制?3、简述Redis缓存雪崩和缓存穿透的问题和解决方案?4、RabbitMQ消息丢失及对应解决方案5、什么叫线程安全?举例说明6、举例说明常用的加密…...
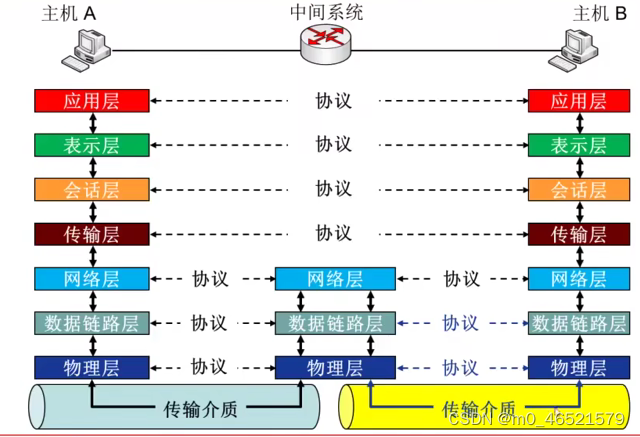
笔记1.5:计算机网络体系结构
从功能上描述计算机网络结构 分层结构 每层遵循某个网络协议完成本层功能 基本概念 实体:表示任何可发送或接收信息的硬件或软件进程。 协议是控制两个对等实体进行通信的规则的集合,协议是水平的。 任一层实体需要使用下层服务,遵循本层…...

【Python】Python 连接字符串应优先使用 join 而不是 +
Python 连接字符串应优先使用 join 而不是 简介 字符串处理在大多数编程程序语言中都不可避免,字符串的连接也是在编程过程中经常需要面对的问题。 Python中的字符串与其他一些程序语言如C、Java有一些不同,它为不 可变对象。 一旦创建便不能改变&…...

uniapp 小程序 父组件调用子组件方法
答案:配合小程序API > this.selectComponent(""),来选择组件,再使用$vm选择组件实例,再调用方法,或者data 1 设置组件的id,如果你的多端,请跟据情况设置ref,class,id,以便通过小…...
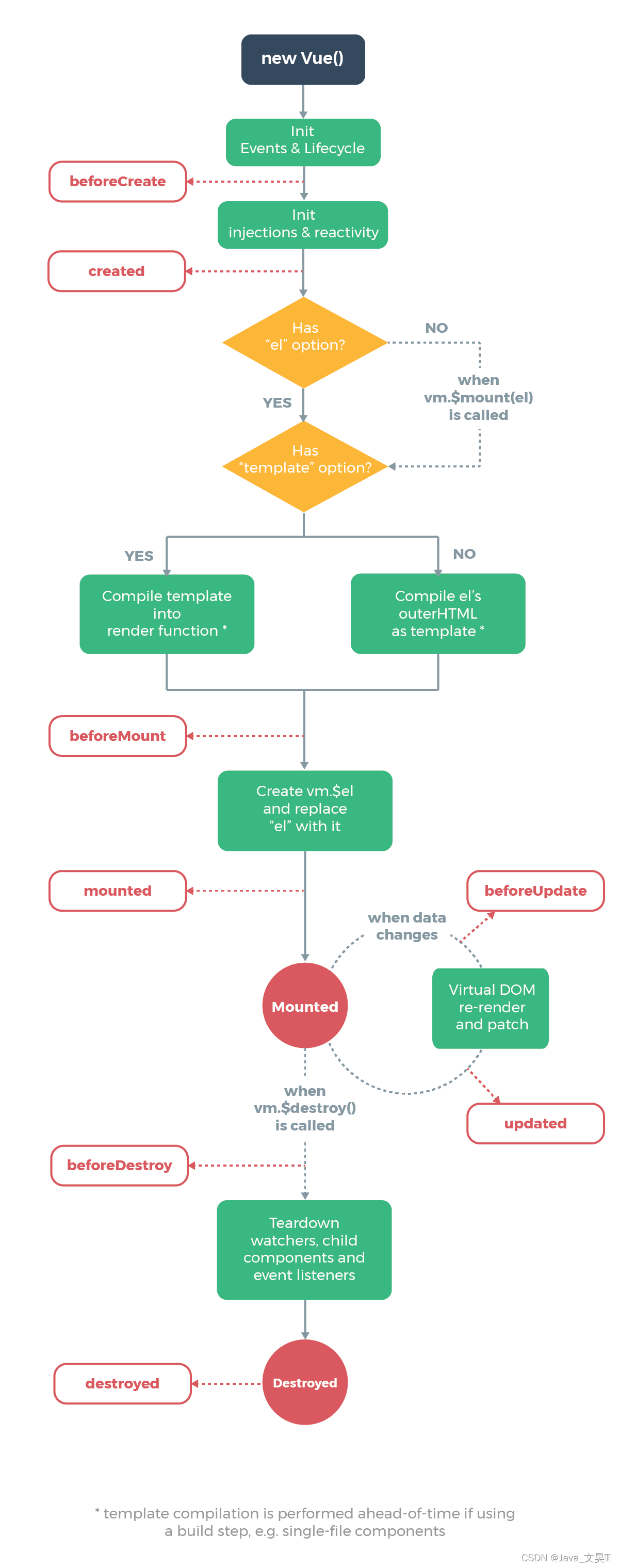
Vue-01:MVVM数据双向绑定与Vue的生命周期
一、Vue介绍 1.1 什么是Vue ? Vue是一个渐进式的JavaScript框架,用于构建用户界面。"渐进式"意味着Vue的设计理念是逐步增强应用的功能和复杂性,而不是一次性地引入所有功能。这使得开发者可以根据项目需求选择性地使用Vue的不同特…...
数据通信网络之OSPFv3基础
文章及资源归档至【AIShareLab】,回复 通信系统与网络 可获取。 文章目录 一、目的二、拓扑三、需求四、步骤 一、目的 掌握路由器的IPv6 基础配置。掌握OSPFv3(单区域)的基础配置。 二、拓扑 如图1 所示,三台路由器R1、R2 和R…...
:串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive)
FPGA-结合协议时序实现UART收发器(五):串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive
FPGA-结合协议时序实现UART收发器(五):串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive 串口顶层模块UART_TOP、例化PLL、UART_FIFO、uart_drive,功能实现。 文章目录 FPGA-结合协议时序实现UART收发器(五&…...

我学编程全靠B站了,真香-国外篇(第三期)
你好,我是Martin。 今天来点猛料,给大家推荐点我的压箱收藏-国外知名大学的公开课。 我推荐的不多,本着少就是多的原则,只给大家推荐我看过最好的五门视频,主要是来自两所国外高校:MIT美国麻省理工、CMU卡…...

c++ 变量常量指针练习题
Q1:在win32 x86模式下,int *p; int **pp; double *q; 请说明p、pp、q各占几个字节的内存单元。 p 占 4 个字节 pp 占 4 个字节 q 占 4 个字节 Q2常量1、1.0、“1”的数据类型是什么? 1 是 整形 int 1.0 是 浮点型 double “1” 是 const char * Q3 语句&…...
Linux底层基础知识
一.汇编,C语言,C,JAVA之间的关系 汇编,C语言,C可以通过不同的编译器,编译成机器码。而java只能由Java虚拟机识别。Java虚拟机可以看成一个操作系统,Java虚拟机是由汇编,C,…...
JUC并发编程--------线程安全篇
目录 什么是线程安全性问题? 如何实现线程安全? 1、线程封闭 2、无状态的类 3、让类不可变 4、加锁和CAS 并发环境下的线程安全问题有哪些? 1、死锁 2、活锁 3、线程饥饿 什么是线程安全性问题? 我们可以这么理解&#…...
机器视觉之Basler工业相机使用和配置方法(C++)
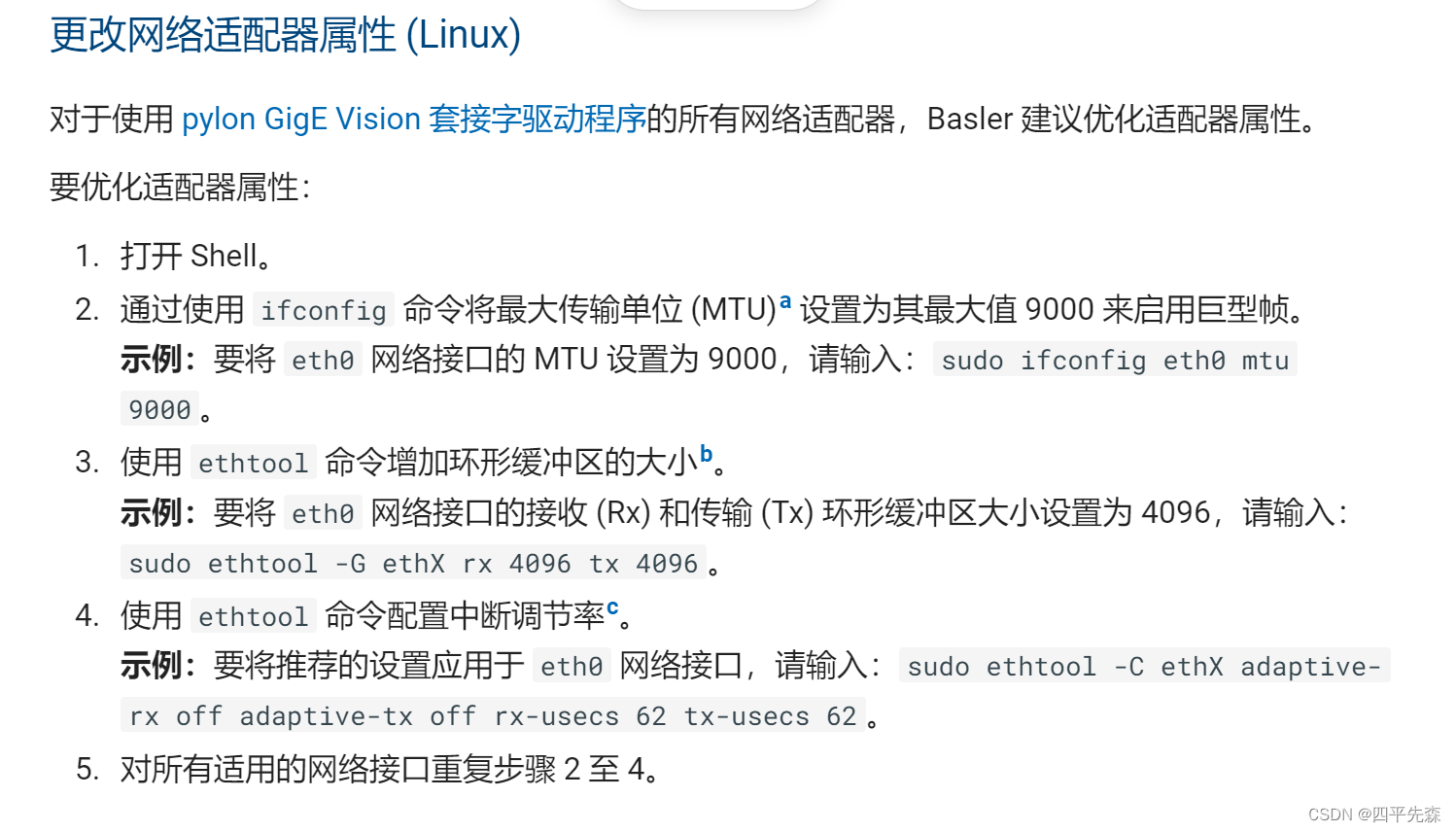
basler工业相机做双目视觉用,出现很多问题记录一下: 首先是多看手册:https://zh.docs.baslerweb.com/software 手册内有所有的源码和参考示例,实际上在使用过程中,大部分都是这些源码,具体项目选择对应的…...
Centos nginx配置文档
1、安装nginx: yum install nginx 2、Nginx常用命令 查看版本:nginx -v 启动:nginx -c /etc/nginx/nginx.conf 重新加载配置:nginx -s reload 停止:nginx -s stop 3、Nginx反向代理配置 nginx配置详解 1、Nginx配置图 详情可以查看:http://nginx.org/ru/docs/example…...
2023/9/14 -- C++/QT
作业: 仿照Vector实现MyVector,最主要实现二倍扩容 #include <iostream>using namespace std;template <typename T> class MyVector { private:T *data;size_t size;size_t V_capacity; public://无参构造MyVector():data(nullptr),size(…...

golang在goland编译时获取环境变量失效
在golang中, 我们通常使用os包来获取环境变量,如: os.Getenv() os.LookupEnv() 等。 但如果我们使用goland编译器,在编译是,这时操作环境变量,会发现os包读取到的环境变量值不变: 新增后&am…...

【Perplexity PubMed医学搜索实战指南】:3大颠覆性技巧让临床研究效率提升300%
更多请点击: https://intelliparadigm.com 第一章:Perplexity PubMed医学搜索实战指南概述 Perplexity AI 作为新一代推理型搜索引擎,其“学术模式”深度集成 PubMed 元数据与语义理解能力,可显著提升临床研究者、循证医学实践者…...

当AI开始写代码,测试工程师的挑战才刚刚开始
最近,我让五款主流的AI编程工具完成了同一个开发需求,结果让我这个做了八年测试的老兵深受震撼。不是为了比较谁写的代码更“优雅”,而是从测试的角度,我看到了未来五年软件质量保障工作的全新图景。 我们测试从业者正站在一个十…...

ZYNQ UltraScale+ MPSoC实战:基于PL端AXI_UART16550 IP核与PS端中断机制,实现RS485多帧长数据可靠接收
1. 工业通信场景下的ZYNQ UltraScale MPSoC实战 在工业自动化领域,RS485总线因其抗干扰能力强、传输距离远等优势,成为设备间通信的主流选择。而ZYNQ UltraScale MPSoC凭借其独特的PSPL架构,能够完美应对工业通信中对实时性和可靠性的严苛要求…...

OpenClaw-Zulip桥接器:实现AI Agent与团队协作工具的无缝集成
1. 项目概述:一个为AI Agent打造的Zulip消息桥梁如果你正在构建一个基于OpenClaw的AI Agent系统,并且你的团队恰好使用Zulip作为内部沟通工具,那么你很可能面临一个痛点:如何让Agent无缝地融入团队的日常对话流?是让团…...

DevOps 与 CI/CD 实战心得:静态网站的自动化部署
背景 自己做了一个独立站项目,访问地址是:https://www.wslwf.com 通过这次实践,对 DevOps 和 CI/CD 在静态网站场景中的应用有了更深的理解。 核心体会 1. 工具链选择至关重要 这次项目使用了 GitHub Actions GitHub Pages,这个组…...
:复制带随机指针的链表)
用100道题拿下你的算法面试(链表篇-7):复制带随机指针的链表
一、面试问题 给定一个链表的头节点,链表中每个节点都包含两个指针:一个指向下一个节点的 next 指针,以及一个指向链表中任意节点的 random 指针。请复制该链表,并返回新链表的头节点。 二、【朴素解法】使用哈希表 —— 时间复杂…...

利用Taotoken模型广场为不同AI应用场景挑选合适模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken模型广场为不同AI应用场景挑选合适模型 面对文本生成、代码审查、智能对话、翻译等多样化的AI应用场景,如…...

OpenClaw狂欢暗藏安全隐患,深圳机密计算科技端云一体方案筑牢AI Agent安全基座
AI Agent时代,安全信任的崩塌2026年初,OpenClaw横空出世,仅用60天打破React保持十年的GitHub Star纪录,成为当年热度最高的现象级开源项目。2026年3月,在英伟达GTC全球开发者大会上,黄仁勋直言称“OpenClaw…...

Java的Random类
在Java中,java.util.Random 类是日常开发中最常用的伪随机数生成器。它基于线性同余算法生成随机数,只要给定相同的初始值(种子 seed),就能生成完全相同的随机数序列。 🎲 Random 类的基础使用 使用 Random…...

基于Godot与Roslyn构建现代化.NET IDE:SharpIDE架构解析与实践
1. 项目概述:一个为.NET开发者打造的现代IDE如果你是一个.NET开发者,尤其是长期使用C#进行开发,那么你肯定对Visual Studio和Visual Studio Code这两款工具又爱又恨。Visual Studio功能强大但略显笨重,VS Code轻快但针对.NET的原生…...