计算机竞赛 深度学习 opencv python 公式识别(图像识别 机器视觉)
文章目录
- 0 前言
- 1 课题说明
- 2 效果展示
- 3 具体实现
- 4 关键代码实现
- 5 算法综合效果
- 6 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 基于深度学习的数学公式识别算法实现
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:4分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
1 课题说明
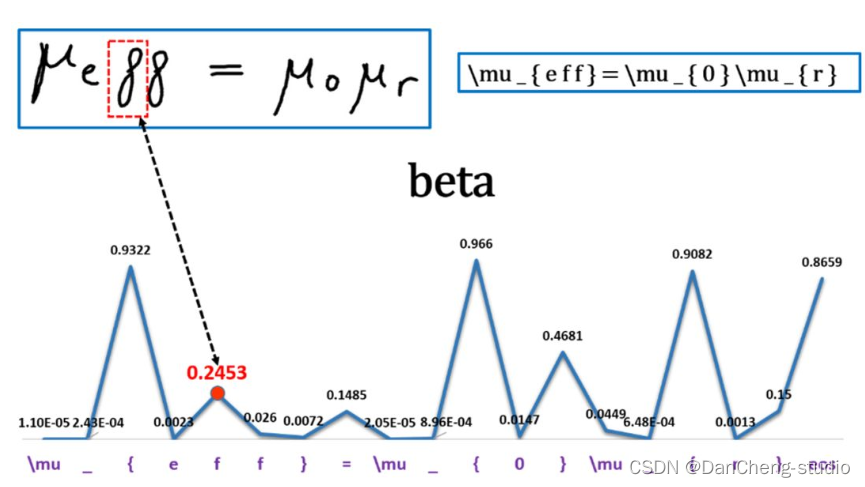
手写数学公式识别较传统OCR问题而言,是一个更复杂的二维手写识别问题,其内部复杂的二维空间结构使得其很难被解析,传统方法的识别效果不佳。随着深度学习在各领域的成功应用,基于深度学习的端到端离线数学公式算法,并在公开数据集上较传统方法获得了显著提升,开辟了全新的数学公式识别框架。然而在线手写数学公式识别框架还未被提出,论文TAP则是首个基于深度学习的端到端在线手写数学公式识别模型,且针对数学公式识别的任务特性提出了多种优化。
公式识别是OCR领域一个非常有挑战性的工作,工作的难点在于它是一个二维的数据,因此无法用传统的CRNN进行识别。
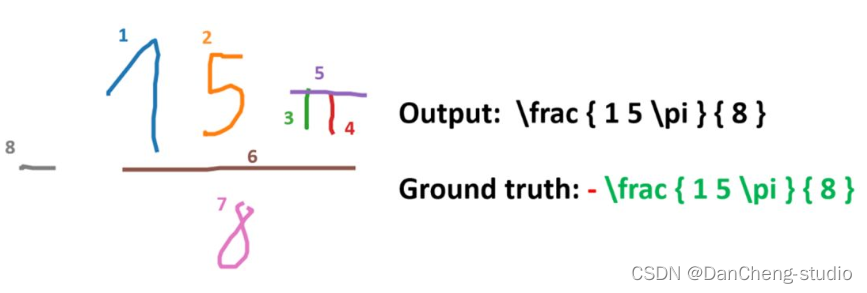
2 效果展示
这里简单的展示一下效果


3 具体实现
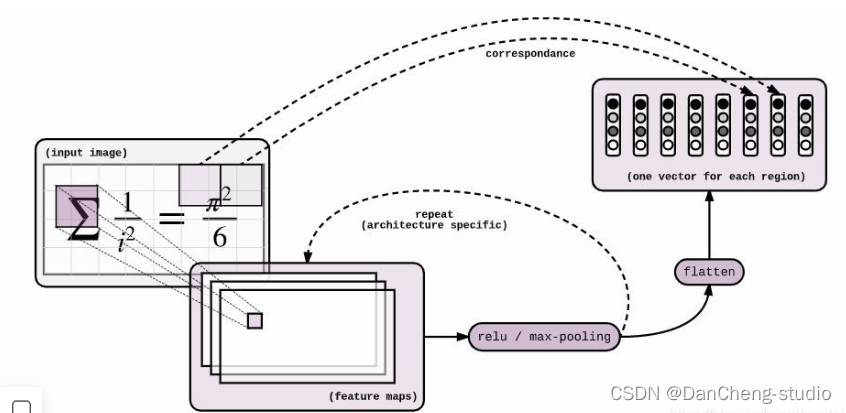
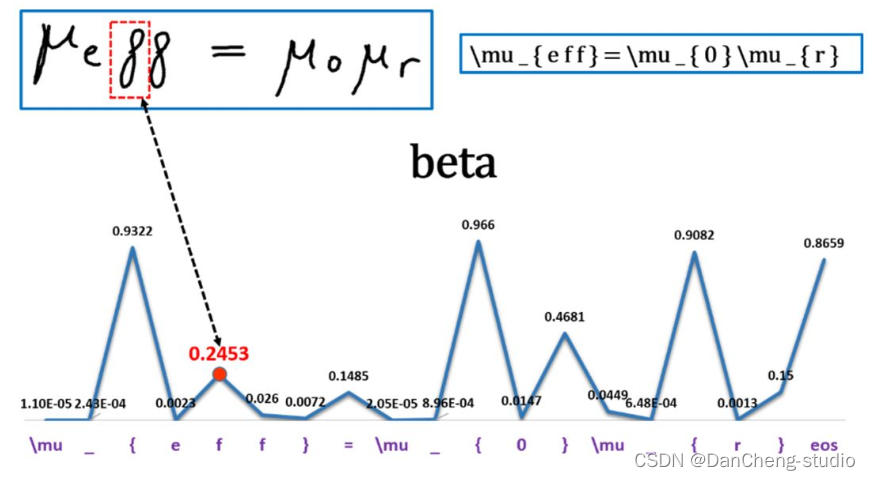
神经网络模型是 Seq2Seq + Attention + Beam
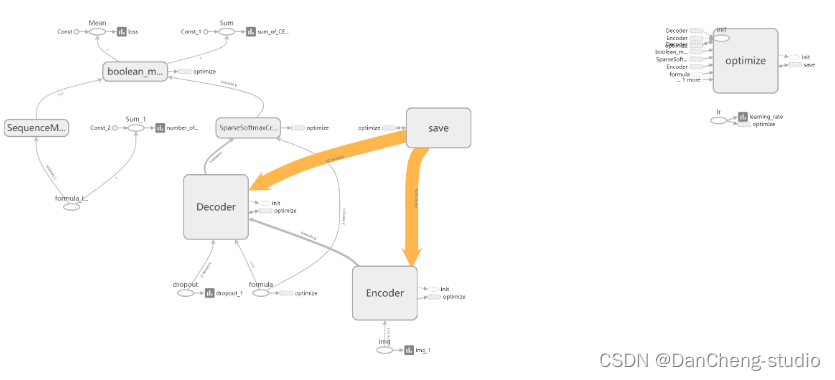
Search。Seq2Seq的Encoder是CNN,Decoder是LSTM。Encoder和Decoder之间插入Attention层,具体操作是这样:Encoder到Decoder有个扁平化的过程,Attention就是在这里插入的。具体模型的可视化结果如下
4 关键代码实现
class Encoder(object):"""Class with a __call__ method that applies convolutions to an image"""def __init__(self, config):self._config = configdef __call__(self, img, dropout):"""Applies convolutions to the imageArgs:img: batch of img, shape = (?, height, width, channels), of type tf.uint8tf.uint8 因为 2^8 = 256,所以元素值区间 [0, 255],线性压缩到 [-1, 1] 上就是 img = (img - 128) / 128Returns:the encoded images, shape = (?, h', w', c')"""with tf.variable_scope("Encoder"):img = tf.cast(img, tf.float32) - 128.img = img / 128.with tf.variable_scope("convolutional_encoder"):# conv + max pool -> /2# 64 个 3*3 filters, strike = (1, 1), output_img.shape = ceil(L/S) = ceil(input/strike) = (H, W)out = tf.layers.conv2d(img, 64, 3, 1, "SAME", activation=tf.nn.relu)image_summary("out_1_layer", out)out = tf.layers.max_pooling2d(out, 2, 2, "SAME")# conv + max pool -> /2out = tf.layers.conv2d(out, 128, 3, 1, "SAME", activation=tf.nn.relu)image_summary("out_2_layer", out)out = tf.layers.max_pooling2d(out, 2, 2, "SAME")# regular conv -> idout = tf.layers.conv2d(out, 256, 3, 1, "SAME", activation=tf.nn.relu)image_summary("out_3_layer", out)out = tf.layers.conv2d(out, 256, 3, 1, "SAME", activation=tf.nn.relu)image_summary("out_4_layer", out)if self._config.encoder_cnn == "vanilla":out = tf.layers.max_pooling2d(out, (2, 1), (2, 1), "SAME")out = tf.layers.conv2d(out, 512, 3, 1, "SAME", activation=tf.nn.relu)image_summary("out_5_layer", out)if self._config.encoder_cnn == "vanilla":out = tf.layers.max_pooling2d(out, (1, 2), (1, 2), "SAME")if self._config.encoder_cnn == "cnn":# conv with stride /2 (replaces the 2 max pool)out = tf.layers.conv2d(out, 512, (2, 4), 2, "SAME")# convout = tf.layers.conv2d(out, 512, 3, 1, "VALID", activation=tf.nn.relu)image_summary("out_6_layer", out)if self._config.positional_embeddings:# from tensor2tensor lib - positional embeddings# 嵌入位置信息(positional)# 后面将会有一个 flatten 的过程,会丢失掉位置信息,所以现在必须把位置信息嵌入# 嵌入的方法有很多,比如加,乘,缩放等等,这里用 tensor2tensor 的实现out = add_timing_signal_nd(out)image_summary("out_7_layer", out)return out学长编码的部分采用的是传统的卷积神经网络,该网络主要有6层组成,最终得到[N x H x W x C ]大小的特征。
其中:N表示数据的batch数;W、H表示输出的大小,这里W,H是不固定的,从数据集的输入来看我们的输入为固定的buckets,具体如何解决得到不同解码维度的问题稍后再讲;
C为输入的通道数,这里最后得到的通道数为512。
当我们得到特征图之后,我们需要进行reshape操作对特征图进行扁平化,代码具体操作如下:
N = tf.shape(img)[0]
H, W = tf.shape(img)[1], tf.shape(img)[2] # image
C = img.shape[3].value # channels
self._img = tf.reshape(img, shape=[N, H*W, C])
当我们在进行解码的时候,我们可以直接运用seq2seq来得到我们想要的结果,这个结果可能无法达到我们的预期。因为这个过程会相应的丢失一些位置信息。
位置信息嵌入(Positional Embeddings)
通过位置信息的嵌入,我不需要增加额外的参数的情况下,通过计算512维的向量来表示该图片的位置信息。具体计算公式如下:

其中:p为位置信息;f为频率参数。从上式可得,图像中的像素的相对位置信息可由sin()或cos表示。
我们知道,sin(a+b)或cos(a+b)可由cos(a)、sin(a)、cos(b)以及sin(b)等表示。也就是说sin(a+b)或cos(a+b)与cos(a)、sin(a)、cos(b)以及sin(b)线性相关,这也可以看作用像素的相对位置正、余弦信息来等效计算相对位置的信息的嵌入。
这个计算过程在tensor2tensor库中已经实现,下面我们看看代码是怎么进行位置信息嵌入。代码实现位于:/model/components/positional.py。
def add_timing_signal_nd(x, min_timescale=1.0, max_timescale=1.0e4):static_shape = x.get_shape().as_list() # [20, 14, 14, 512]num_dims = len(static_shape) - 2 # 2channels = tf.shape(x)[-1] # 512num_timescales = channels // (num_dims * 2) # 512 // (2*2) = 128log_timescale_increment = (math.log(float(max_timescale) / float(min_timescale)) /(tf.to_float(num_timescales) - 1)) # -0.1 / 127inv_timescales = min_timescale * tf.exp(tf.to_float(tf.range(num_timescales)) * -log_timescale_increment) # len == 128 计算128个维度方向的频率信息for dim in range(num_dims): # dim == 0; 1length = tf.shape(x)[dim + 1] # 14 获取特征图宽/高position = tf.to_float(tf.range(length)) # len == 14 计算x或y方向的位置信息[0,1,2...,13]scaled_time = tf.expand_dims(position, 1) * tf.expand_dims(inv_timescales, 0) # pos = [14, 1], inv = [1, 128], scaled_time = [14, 128] 计算频率信息与位置信息的乘积signal = tf.concat([tf.sin(scaled_time), tf.cos(scaled_time)], axis=1) # [14, 256] 合并两个方向的位置信息向量prepad = dim * 2 * num_timescales # 0; 256postpad = channels - (dim + 1) * 2 * num_timescales # 512-(1;2)*2*128 = 256; 0signal = tf.pad(signal, [[0, 0], [prepad, postpad]]) # [14, 512] 分别在矩阵的上下左右填充0for _ in range(1 + dim): # 1; 2signal = tf.expand_dims(signal, 0)for _ in range(num_dims - 1 - dim): # 1, 0signal = tf.expand_dims(signal, -2)x += signal # [1, 14, 1, 512]; [1, 1, 14, 512]return x
得到公式图片x,y方向的位置信息后,只需要要将其添加到原始特征图像上即可。
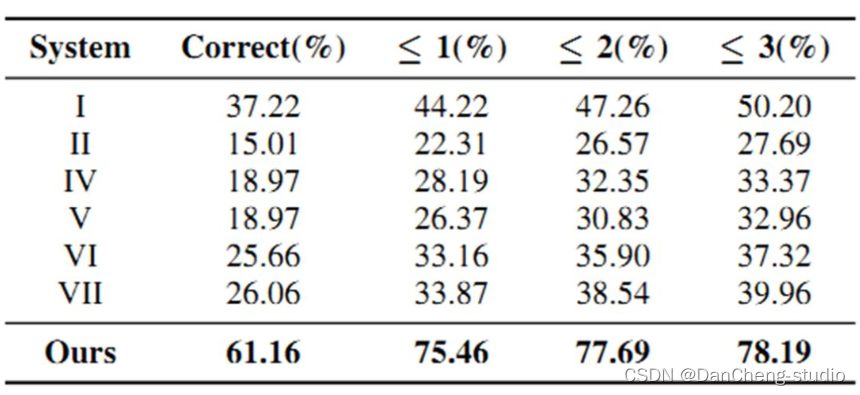
5 算法综合效果

6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机竞赛 深度学习 opencv python 公式识别(图像识别 机器视觉)
文章目录 0 前言1 课题说明2 效果展示3 具体实现4 关键代码实现5 算法综合效果6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 基于深度学习的数学公式识别算法实现 该项目较为新颖,适合作为竞赛课题方向,学…...

KPM算法
概念 KMP(Knuth–Morris–Pratt)算法是一种字符串匹配算法,用于在一个主文本字符串中查找一个模式字符串的出现位置。KMP算法通过利用模式字符串中的重复性,避免无意义的字符比较,从而提高效率。 KMP算法的核心思想是…...
全流程GMS地下水数值模拟及溶质(包含反应性溶质)运移模拟技术教程
详情点击公众号链接:全流程GMS地下水数值模拟及溶质(包含反应性溶质)运移模拟技术教程 前言 GMS三维地质结构建模 GMS地下水流数值模拟 GMS溶质运移数值模拟与反应性溶质运移模 详情 1.GMS的建模数据的收集、数据预处理以及格式等ÿ…...

GE D20 EME 10BASE-T电源模块产品特点
GE D20 EME 10BASE-T 电源模块通常是工业自动化和控制系统中的一个关键组件,用于为系统中的各种设备和模块提供电源。以下是可能包括在 GE D20 EME 10BASE-T 电源模块中的一些产品特点: 电源输出:D20 EME 模块通常提供一个或多个电源输出通道…...
游戏工作时d3dcompiler_47.dll缺失怎么修复?5种修复方法分享
游戏提示 d3dcompiler_47.dll 缺失的困扰,相信许多玩家都遇到过。这种情况通常会导致游戏无法正常运行,给玩家带来很大的不便。那么,该如何解决这个问题呢?小编将为大家介绍几种解决方法,希望对大家有所帮助。 首先&am…...
关于激光探测器光斑质心算法在FPGA硬件的设计
目录 0引言 1CCD采集图像质心算法 2基于FPGA的图像质心算法 3仿真结果与分析 4结论 0引言 在一些姿态检测的实际应用中,需要在被测对象上安装激光探测器[1],利用CCD相机捕捉激光光斑来检测观测对象的实际情况,光斑图像质心坐标的提取是图…...

理清SpringBoot CURD处理逻辑、顺序
💗wei_shuo的个人主页 💫wei_shuo的学习社区 🌐Hello World ! 理清SpringBoot CURD处理逻辑、顺序 Controller(控制器): 控制器接收来自客户端的请求,并负责处理请求的路由和参数解析…...

缓存读写淘汰算法W-TinyLFU算法
在W-TinyLFU中,每个缓存项都会被赋予一个权重。这个权重可以表示缓存项的大小、使用频率、是否是热数据等因素。每次需要淘汰缓存时,W-TinyLFU会选择小于一定阈值的权重的缓存项进行淘汰,以避免淘汰热数据。 另外,W-TinyLFU也会根…...
C++中的 throw详解
在《C++异常处理》一节中,我们讲到了 C++ 异常处理的流程,具体为: 抛出(Throw)--> 检测(Try) --> 捕获(Catch) 异常必须显式地抛出,才能被检测和捕获到;如果没有显式的抛出,即使有异常也检测不到。在 C++ 中,我们使用 throw 关键字来显式地抛出异常,它的用…...

vue 封装Table组件
基于element-plus UI 框架封装一个table组件 在项目目录下的components新建一个Table.vue <template><section class"wrap"><el-tableref"table":data"tableData" v-loading"loading" style"width: 100%":…...

MySQL主从复制错误
当在MySQL的多线程复制中遇到错误时,你可能会看到上述的错误信息。错误的核心在于从服务器上的工作线程在尝试执行一个特定的事务时遇到了问题。 为了解决这个问题,你可以采取以下步骤: 查看MySQL的错误日志:错误日志可能会提供更…...

Redis群集
目录 1、redis群集三种模式 2、Redis 主从复制 2.1 主从复制的作用 2.2 主从复制流程 2.3 搭建Redis 主从复制 3、Redis 哨兵模式 3.1 哨兵模式的作用 3.2 故障转移机制 3.3 主节点的选举 4、Redis 群集模式 4.1 集群的作用 4.2 Redis集群的数据分片 4.3 搭建Redis…...
Spring AOP以及统一处理
一.Spring AOP 1.什么是Spring AOP AOP(Aspect Oriented Programming):面向切面编程,它是一种思想,它是对某一类事情的集中处理。 2.AOP的作用 想象一个场景,我们在做后台系统时,除了登录…...
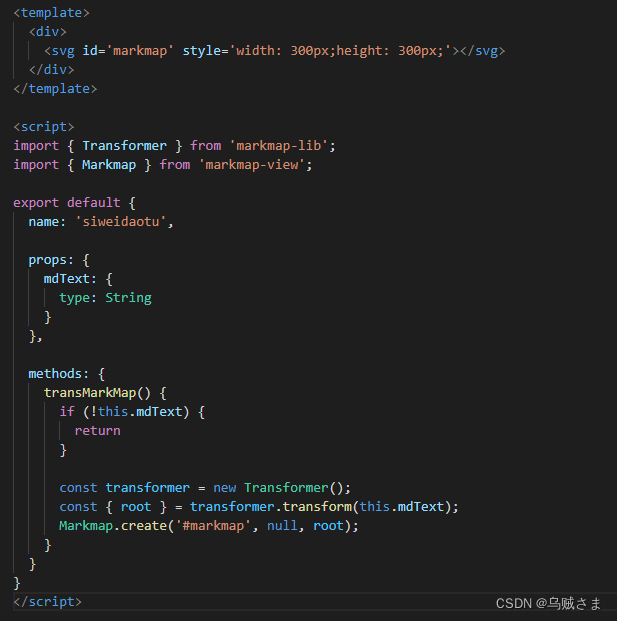
vue2markdown转思维导图
官网 http://markmap.js.org 按照官网安装markmap-lib,markmap-view两个依赖外,还需要安装markmap-common 如果报错提示vuePdfNoSss相关问题,需要安装vue-pdf 如果报错can’t import the named export ‘xxx’ from non EcmaScript module,需…...

docker下redis备份文件dump.rdb获取
1.查看镜像 docker ps -a 2.进入redis客户端 docker exec -it redis redis-cli 3.保存备份文件 save 4.查看文件存放位置 CONFIG GET dir 5.将docker中文件拷出 docker cp id或name:容器中文件的路径 目标目录地址...
二十一、MySQL(多表)内连接、外连接、自连接实现
1、多表查询 (1)基础概念: (2)多表查询的分类: 2、内连接 (1)基础概念: (2)隐式内连接: 基础语法: select 表1.name,…...

Zookeeper运维
我是一个目录 1. 参数说明2. Zookeeper优化建议3. Zookeeper性能查看4. 建议 1. 参数说明 工作节点瞬间压力大,导致和集群通信出现延迟,被踢出节点,瞬间释放的连接立即又连接到另外节点,最终集群挂掉。加了一些延迟配置后…...

uniapp 点击事件-防重复点击
uniapp 点击事件-防重复点击 1、common文件并创建anti-shake.js文件 // 防止处理多次点击 function noMoreClicks(methods, info) {// methods是需要点击后需要执行的函数, info是点击需要传的参数let that this;if (that.noClick) {// 第一次点击that.noClick f…...

推进“数智+数治”,中期科技智慧公厕驱动城市公厕更新升级发展
随着城市化的快速发展和人口的不断增加,公共厕所这一基础设施的更新升级成为了亟待解决的问题。过去的传统公厕往往存在着环境脏乱差、无法保证使用者的舒适度等诸多问题。而智慧公厕则能够通过互联网和物联网的技术手段,实现智能化的运行管理࿰…...
)
4、模板(二叉树,红黑树,STL的实现)
1. 泛型编程 2. 模板:参数类型化 3. 模板分类 3.1 函数模板 概念 实例化:隐式实例化,显式实例化 3.2 类模板 4. 在模板参数列表中:class和typename 5.模板参数列表:template <class T , size_t N> 类型参数&#x…...

Windows安卓子系统终极指南:从基础配置到专业开发全流程
Windows安卓子系统终极指南:从基础配置到专业开发全流程 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA 想要在Windows 11上无缝运行安卓应用吗&…...

基于GAN的端到端ISP:用AI学习从RAW到RGB的图像处理革命
1. 项目概述:从“拍”到“算”的ISP革命在计算机视觉和图像处理领域,图像信号处理器(ISP)一直扮演着“幕后英雄”的角色。它负责将相机传感器捕捉到的原始、未经处理的RAW Bayer数据,转换为我们手机相册里那些色彩鲜艳…...

中小团队如何利用 Taotoken 统一管理多个大模型 API 调用与成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 中小团队如何利用 Taotoken 统一管理多个大模型 API 调用与成本 对于需要同时调用多种 AI 模型的中小开发团队而言,技术…...
)
别再复制粘贴了!手把手教你用MATLAB/Simulink把低通滤波器写成C代码(附避坑指南)
从MATLAB到嵌入式C:低通滤波器工程化实现全指南 在嵌入式系统开发中,数字滤波器的实现往往成为算法落地的关键瓶颈。许多工程师能够熟练使用MATLAB设计出完美的滤波器模型,却在将其转化为实际可用的C代码时频频碰壁——仿真曲线平滑优美&…...

当1000A牵引电流遇上微安级信号:高铁轨道电路中扼流变压器的‘抗干扰’实战解析
高铁轨道电路中扼流变压器的抗干扰设计与工程实践 电气化铁路的轨道电路系统面临着前所未有的电磁兼容挑战——如何在承载1000A级牵引电流的钢轨上,同时可靠传输微安级的信号电流?这个看似矛盾的需求,正是现代高铁信号系统设计的核心难题之一…...

2026 AI大模型API加速网站推荐
在AI开发领域,一个现实问题始终困扰着开发者:如何接入模型厂商的官方API?在海外,注册、绑卡、调用这三个步骤就能轻松解决。然而,国内开发者面临着跨境网络波动、外币支付门槛、发票合规需求以及多厂商Key碎片化管理等…...

Super IO插件终极指南:5分钟掌握Blender文件处理革命
Super IO插件终极指南:5分钟掌握Blender文件处理革命 【免费下载链接】super_io blender addon for copy paste import / export 项目地址: https://gitcode.com/gh_mirrors/su/super_io Super IO是一款彻底改变Blender工作流程的革命性插件,它通…...

Windows APK安装工具终极指南:轻松在电脑上安装Android应用
Windows APK安装工具终极指南:轻松在电脑上安装Android应用 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 您是否曾经希望在Windows电脑上直接安装Android…...

别再折腾了!STM32CubeMX+Keil 5+Proteus 8.9保姆级联调配置,一次搞定
STM32开发环境联调实战:从零搭建CubeMXKeilProteus高效工作流 第一次接触STM32开发时,我被各种工具链的配置折磨得焦头烂额——CubeMX生成的工程在Keil里报错、Proteus仿真时芯片毫无反应、Debug选项神秘消失...如果你也经历过这种绝望,这篇文…...
)
从继电器到边缘计算:拆解PAC控制器里的‘智能手机’架构(以Codesys/倍福为例)
从继电器到边缘计算:拆解PAC控制器里的‘智能手机’架构 在工业自动化领域,PAC(可编程自动化控制器)正逐渐取代传统PLC,成为智能制造的核心大脑。这种转变类似于功能手机向智能手机的进化——从单一功能到开放平台&…...