驱动DAY9
驱动文件
#include <linux/init.h>
#include <linux/module.h>
#include <linux/of.h>
#include <linux/of_gpio.h>
#include <linux/gpio.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/slab.h>
#include <linux/platform_device.h>
#include <linux/mod_devicetable.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>//获取资源结构体
struct resource *res;
//中断号
unsigned int irqno;
//gpio信息结构体
struct gpio_desc *gpiono;
//字符设备驱动对象空间首地址
struct cdev *cdev;
char kbuf[128] = {0};
//主设备号
unsigned int major = 0;
//次设备号
unsigned int minor = 0;
//设备号
dev_t devno;
module_param(major,uint,0664); //方便在命令行传递major的值
//用于保存目录信息
struct class *cls;
//用于保存设备节点信息
struct device *dev;
int number = 0;
unsigned int condition = 0;
wait_queue_head_t wq_head;//中断处理函数
irqreturn_t key_handler(int irq,void *dev)
{gpiod_set_value(gpiono,!(gpiod_get_value(gpiono)));number = !number;condition = 1;wake_up_interruptible(&wq_head);return IRQ_HANDLED;
}int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}
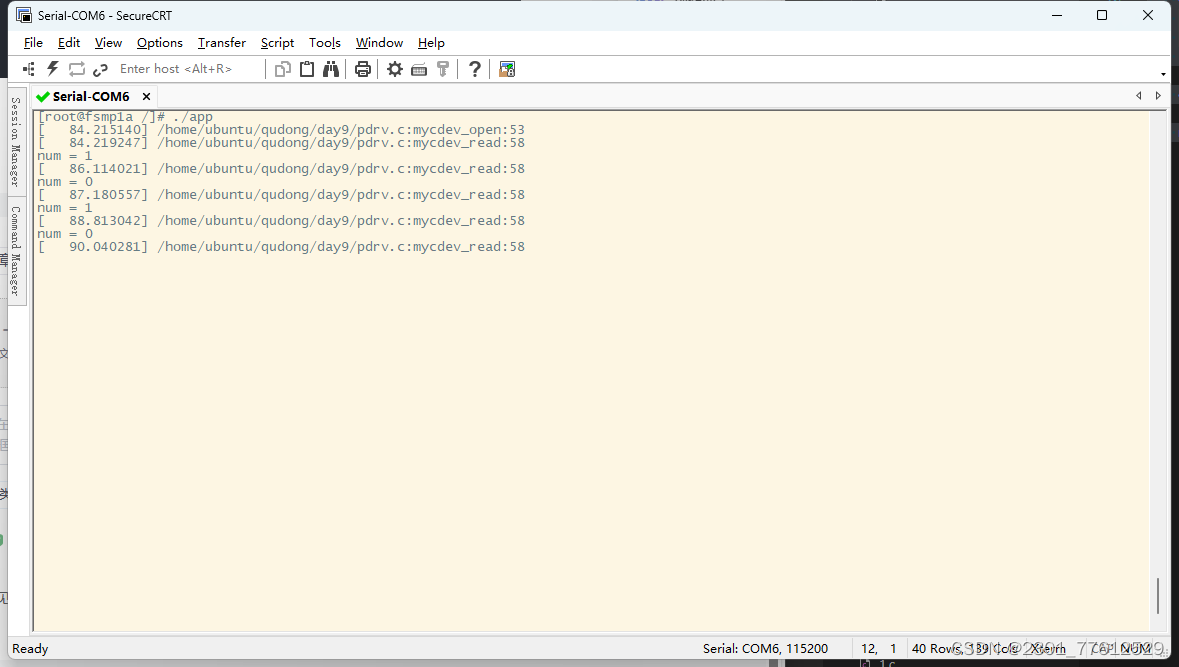
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);int ret;//向用户空间读取拷贝if(size>sizeof(number))//用户空间期待读取的大小内核满足不了,那就给内核支持的最大大小size=sizeof(number);//切换进程为休眠态wait_event_interruptible(wq_head,condition);ret=copy_to_user(ubuf,&number,size);if(ret)//拷贝失败{printk("copy_to_user filed\n");return ret;}condition = 0;return 0;
}int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}//定义操作方法结构体变量并赋值
struct file_operations fops={.open=mycdev_open,.read=mycdev_read,.release=mycdev_close,
};
//封装probe函数
int pdrv_probe(struct platform_device *pdev)
{int ret;// 为字符设备驱动对象申请空间cdev = cdev_alloc();if (cdev == NULL){printk("字符设备驱动对象申请空间失败\n");ret = -EFAULT;goto out1;}printk("申请对象空间成功\n");// 初始化字符设备驱动对象cdev_init(cdev, &fops);// 申请设备号if (major > 0) // 静态指定设备号{ret = register_chrdev_region(MKDEV(major, minor), 3, "myplatform");if (ret){printk("静态申请设备号失败\n");goto out2;}}else if (major == 0) // 动态申请设备号{ret = alloc_chrdev_region(&devno, minor, 3, "myplatform");if (ret){printk("动态申请设备号失败\n");goto out2;}major = MAJOR(devno); // 获取主设备号minor = MINOR(devno); // 获取次设备号}printk("申请设备号成功\n");// 注册字符设备驱动对象ret = cdev_add(cdev, MKDEV(major, minor), 3);if (ret){printk("注册字符设备驱动对象失败\n");goto out3;}printk("注册字符设备驱动对象成功\n");// 向上提交目录信息cls = class_create(THIS_MODULE, "myplatform");if (IS_ERR(cls)){printk("向上提交目录失败\n");ret = -PTR_ERR(cls);goto out4;}printk("向上提交目录成功\n");// 向上提交设备节点信息int i;for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myplatform%d", i);if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");ret = -PTR_ERR(dev);goto out5;}}printk("向上提交设备信息成功\n");//初始化等待队列头init_waitqueue_head(&wq_head);//获取MEM类型的资源res = platform_get_resource(pdev,IORESOURCE_MEM,0);if(res == NULL){printk("获取MEM类型资源失败\n");return -ENXIO;}//获取中断类型的资源irqno = platform_get_irq(pdev,0);if(irqno < 0){printk("获取中断类型资源失败\n");return -ENXIO;}//注册中断int ret1 = request_irq(irqno,key_handler,IRQF_TRIGGER_FALLING,"key_int",NULL);if(ret1<0){printk("注册按键1中断失败\n");return ret1;}printk("注册按键1中断成功\n");printk("mem资源%llx\n",res->start);printk("irq资源%d\n",irqno);printk("%s;%s:%d\n",__FILE__,__func__,__LINE__);//设备树匹配成功后,设备树节点指针可以通过pdev->dev.of_node获取//基于设备树节点信息获取gpio_desc对象指针gpiono = gpiod_get_from_of_node(pdev->dev.of_node,"led1-gpio",0,GPIOD_OUT_LOW,NULL);if(IS_ERR(gpiono)){printk("解析GPIO管脚信息失败\n");return -ENXIO;}printk("解析GPIO管脚信息成功\n");return 0;
out5:// 释放前一次提交成功的设备信息for (--i; i >= 0; i--){device_destroy(cls, MKDEV(major, i));}class_destroy(cls); // 释放目录
out4:cdev_del(cdev);
out3:unregister_chrdev_region(MKDEV(major, minor), 3);
out2:kfree(cdev);
out1:return ret;
}
//封装remove函数
int pdrv_remove(struct platform_device *pdev)
{//关灯gpiod_set_value(gpiono,0);//释放GPIO信息gpiod_put(gpiono);//注销中断free_irq(irqno,NULL);// 释放节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 销毁目录class_destroy(cls);// 注销驱动对象cdev_del(cdev);// 释放设备号unregister_chrdev_region(MKDEV(major, minor), 3);// 释放对象空间kfree(cdev);printk("%s;%s:%d\n",__FILE__,__func__,__LINE__);return 0;
}
//构建设备树匹配表
struct of_device_id oftable[] = {{ .compatible = "hqyj,myplatform"},{ /* end node */ },//防止数组越界
};
//定义驱动信息对象并初始化
struct platform_driver pdrv = {.probe = pdrv_probe,.remove = pdrv_remove,.driver = {.name = "bbbbb",.of_match_table=oftable,//用于设备树匹配 },
};//一键注册宏
module_platform_driver(pdrv);MODULE_LICENSE("GPL");应用程序
#include<stdlib.h>
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include<unistd.h>
#include<string.h>int main(int argc, char const *argv[])
{int num;int fd=open("/dev/myplatform0",O_RDWR);if(fd<0){printf("打开设备文件失败\n");exit(-1);}while(1){read(fd,&num,sizeof(num));printf("num = %d\n",num);}close(fd);return 0;
}
相关文章:
驱动DAY9
驱动文件 #include <linux/init.h> #include <linux/module.h> #include <linux/of.h> #include <linux/of_gpio.h> #include <linux/gpio.h> #include <linux/fs.h> #include <linux/io.h> #include <linux/device.h> #incl…...

03贪心:摆动序列
03贪心:摆动序列 376. 摆动序列 局部最优:删除单调坡度上的节点(不包括单调坡度两端的节点),那么这个坡度就可以有两个局部峰值。 整体最优:整个序列有最多的局部峰值,从而达到最长摆动序列。…...

javascript获取元素在浏览器中工作区域的左、右、上、下距离,或带滚动条的元素在页面中的大小
//获取元素在包含元素框中的大小 //第1个函数为获取元素在包含元素中左内边框的距离 function getELementLeft(element){//获取元素在包含元素左边距离var actualeftelement.offsetLeft;//获取元素的上级包含元素var currentelement.offsetParent;//循环到一直没有包含元素whil…...
VSCode 安装使用教程 环境安装配置 保姆级教程
一个好用的 IDE 不仅能提升我们的开发效率,还能让我们保持愉悦的心情,这样才是非常 Nice 的状态 ^_^ 那么,什么是 IDE 呢 ? what IDE(Integrated Development Environment,集成开发环境)是含代码…...
c盘中temp可以删除吗?appdata\local\temp可以删除吗?
http://www.win10d.com/jiaocheng/22594.html C盘AppData文件夹是一个系统文件夹,里面存储着临时文件,各种应用的自定义设置,快速启动文件等。近期有用户发现appdata\local\temp占用了大量的空间,那么该文件可以删除吗?…...

Java手写聚类算法
Java手写聚类算法 1. 算法思维导图 以下是聚类算法的实现原理的思维导图,使用Mermanid代码表示: #mermaid-svg-AK9EgYRS38PkRJI4 {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-AK9EgYRS38…...
解密Java多线程中的锁机制:CAS与Synchronized的工作原理及优化策略
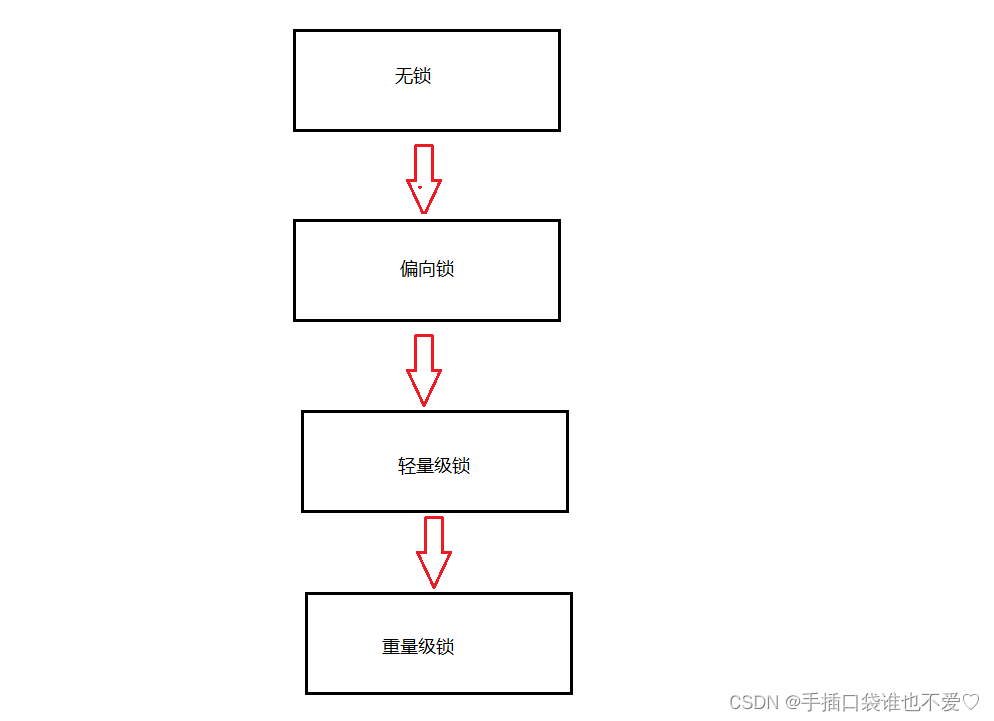
目录 CAS什么是CASCAS的应用ABA问题异常举例 Synchronized 原理基本特征加锁过程偏向锁轻量级锁重量级锁 其他优化操作锁消除锁粗化 CAS 什么是CAS CAS: 全称Compare and swap,字面意思:”比较并交换“,CAS涉及如下操作: 假设内存中的原数据…...
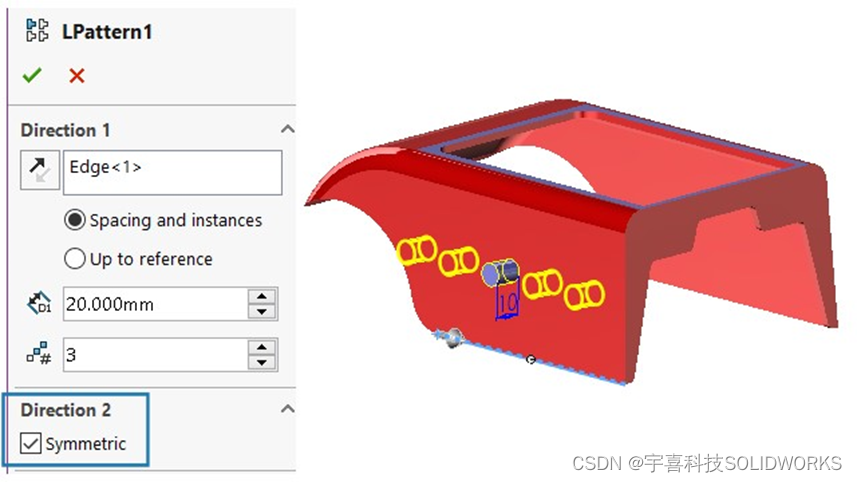
solid works草图绘制与设置零件特征的使用说明
(1)草图绘制 • 草图块 在 FeatureManager 设计树中,您可以隐藏和显示草图的单个块。您还可以查看块是欠定义 (-)、过定义 () 还是完全定义。 要隐藏和显示草图的单个块,请在 FeatureManager 设计树中右键单击草图块,…...
页面跳转后,该页面不刷新问题)
vue3使用router.push()页面跳转后,该页面不刷新问题
文章目录 原因分析最优解决 原因分析 这是一个常见问题,当使用push的时候,会向history栈添加一个新记录,这个时候,再添加一个完全相同的路由时,就不会再次刷新了 最优解决 在页面跳转时加上params参数时间 router.…...

如何理解数字工厂管理系统的本质
随着科技的飞速发展和数字化转型的推动,数字工厂管理系统逐渐成为工业4.0时代的重要工具。数字工厂系统旨在整合和优化工厂运营的各个环节,通过实时数据分析和处理,提升生产效率,降低成本,并增强企业的整体竞争力。为了…...
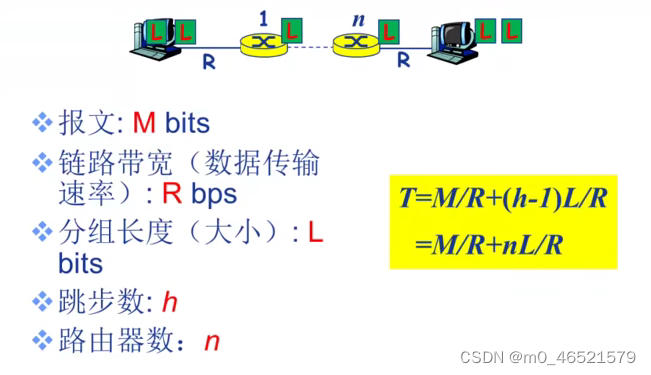
笔记1.3 数据交换
如何实现数据通过网络核心从源主机到达目的主机? 数据交换 交换网络: 动态转接动态分配传输资源 数据交换类型: (1)电路交换 (2)报文交换 (3)分组交换 电路交换的特…...
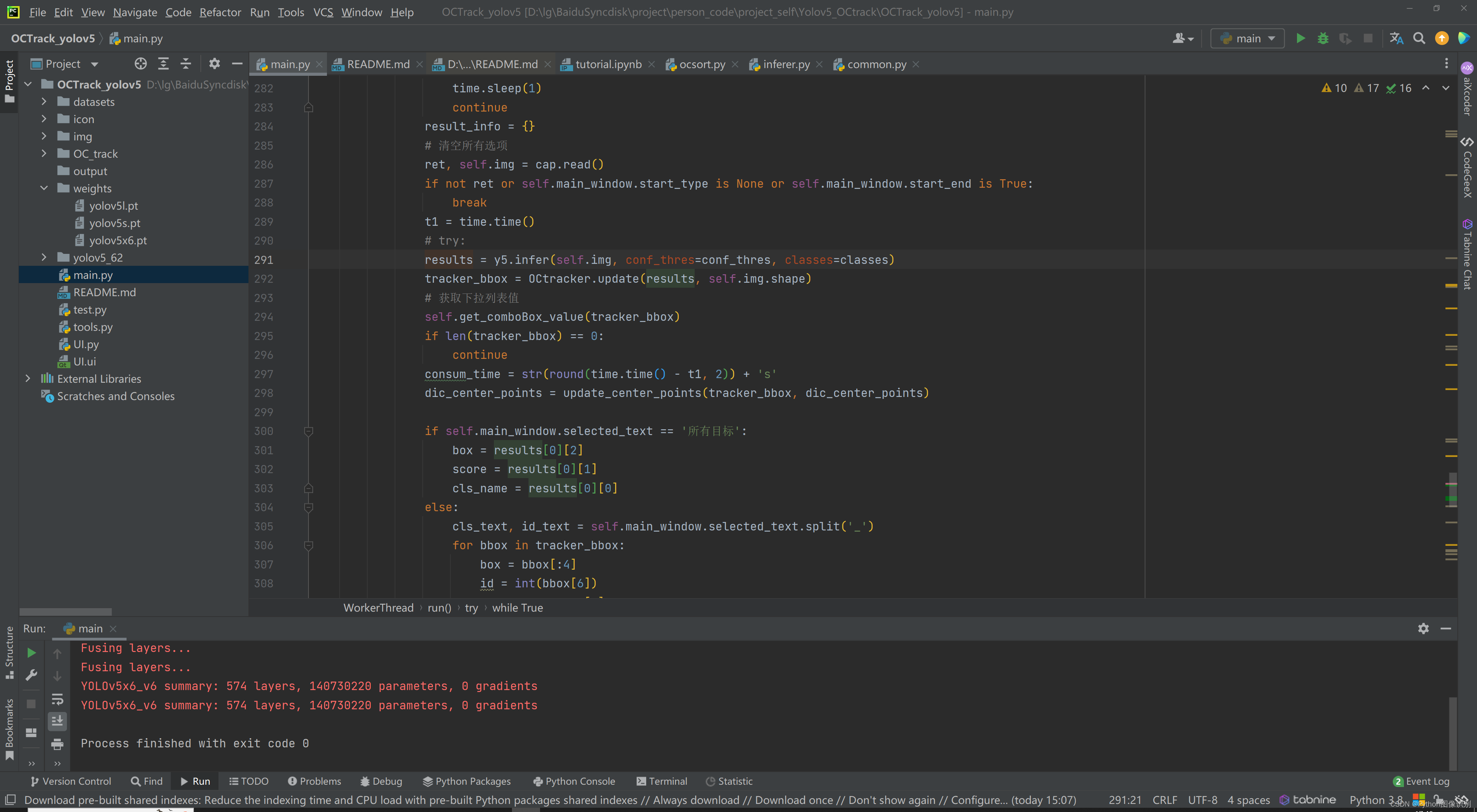
实时车辆行人多目标检测与跟踪系统(含UI界面,Python代码)
算法架构: 目标检测:yolov5 目标跟踪:OCSort其中, Yolov5 带有详细的训练步骤,可以根据训练文档,训练自己的数据集,及其方便。 另外后续 目标检测会添加 yolov7 、yolox,目标跟踪会…...

谷歌AI机器人Bard发布强大更新,支持插件功能并增强事实核查;全面整理高质量的人工智能、机器学习、大数据等技术资料
🦉 AI新闻 🚀 谷歌AI机器人Bard发布强大更新,支持插件功能并增强事实核查 摘要:谷歌的人工智能聊天机器人Bard发布了一项重大更新,增加了对谷歌应用的插件支持,包括 Gmail、Docs、Drive 等,并…...
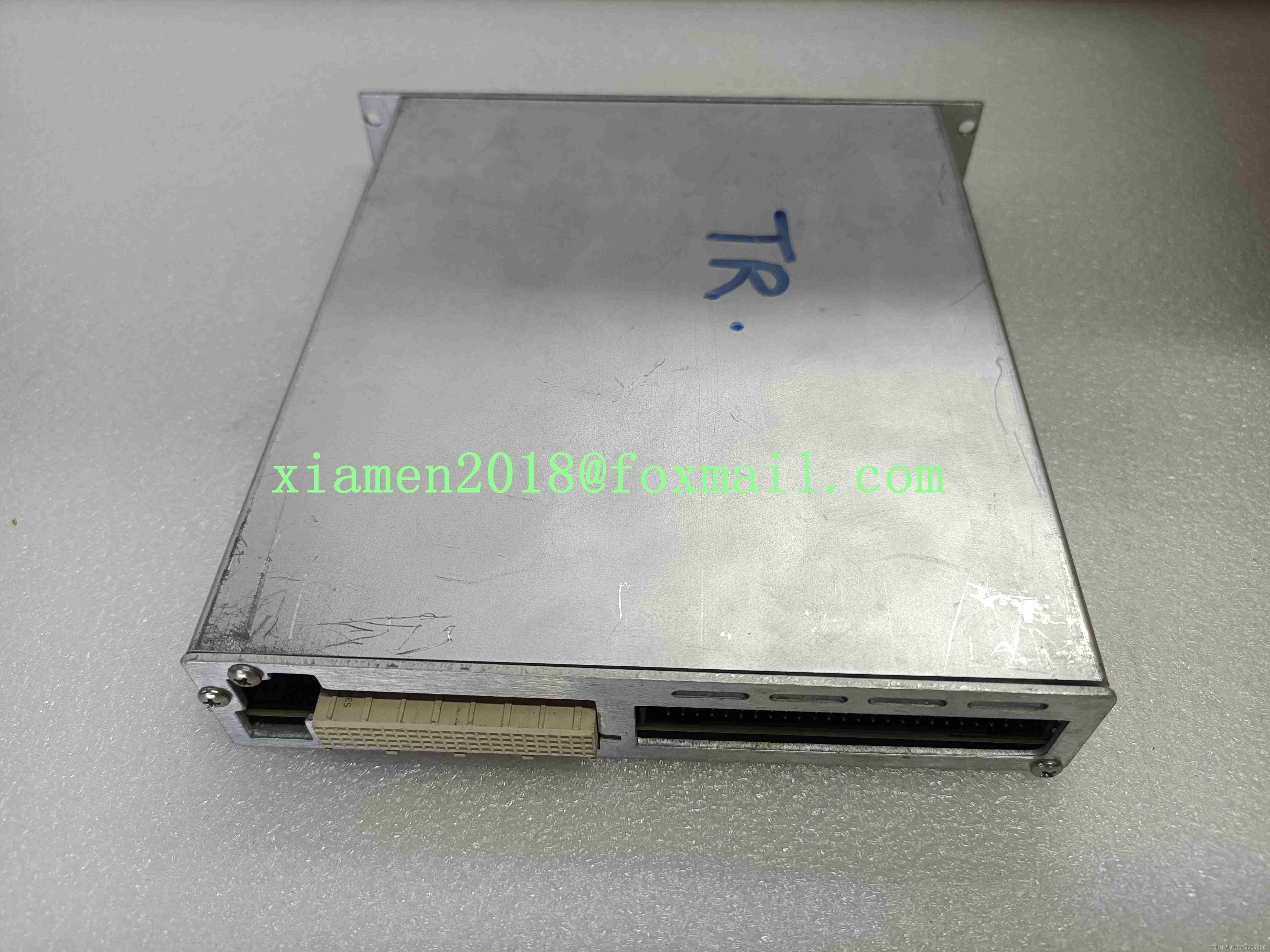
NI SCXI-1125 数字量控制模块
NI SCXI-1125 是 NI(National Instruments)生产的数字量控制模块,通常用于工业自动化和控制系统中,以进行数字输入和输出控制。以下是该模块的一些主要产品特点: 数字量输入:SCXI-1125 模块通常具有多个数字…...
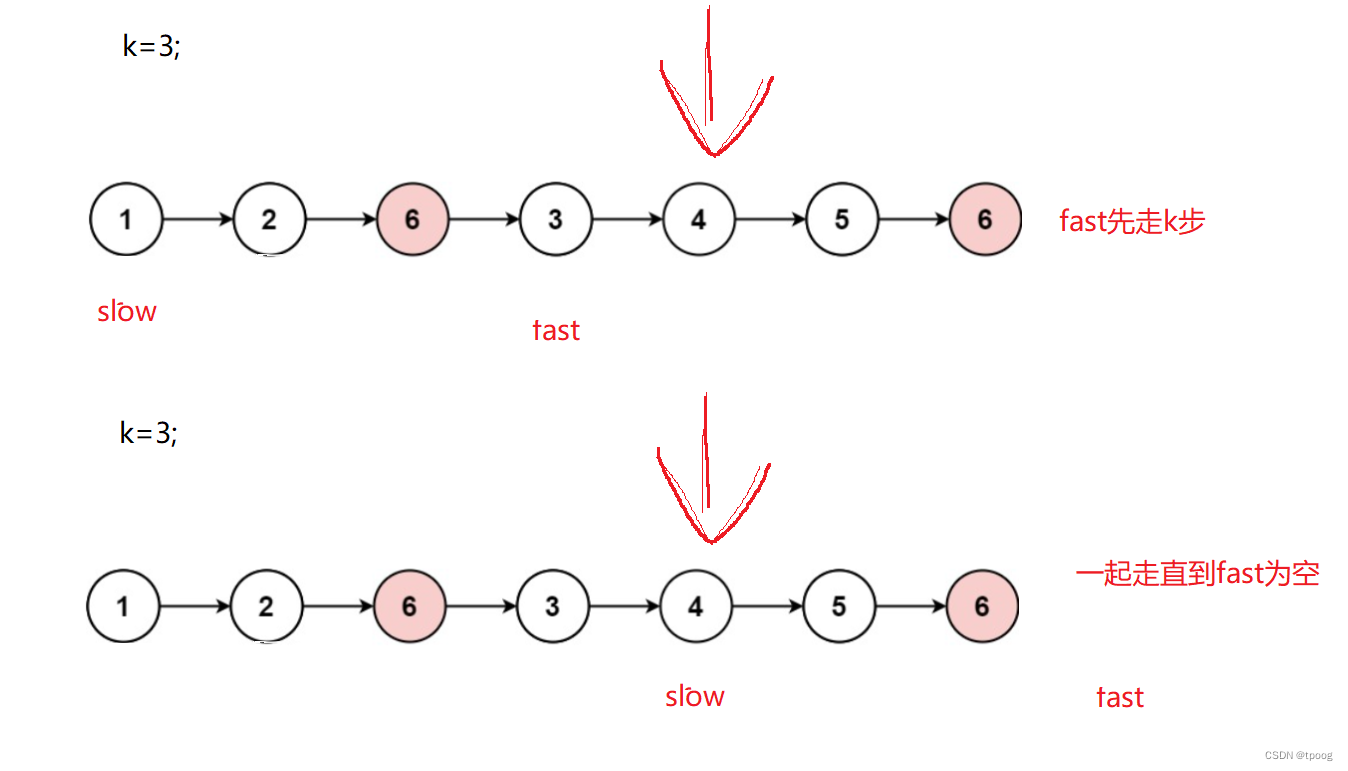
链表oj题1(Leetcode)——移除链表元素,反转链表,链表的中间节点,
链表OJ 一,移除链表元素1.1分析1.2代码 二,找到链表的中间节点2.1分析2.2代码 三,反转链表3.1分析3.2代码 四,找到链表中倒数第k个节点4.1分析4.2代码 一,移除链表元素 移除链表元素 1.1分析 这里的删除要分成两种…...
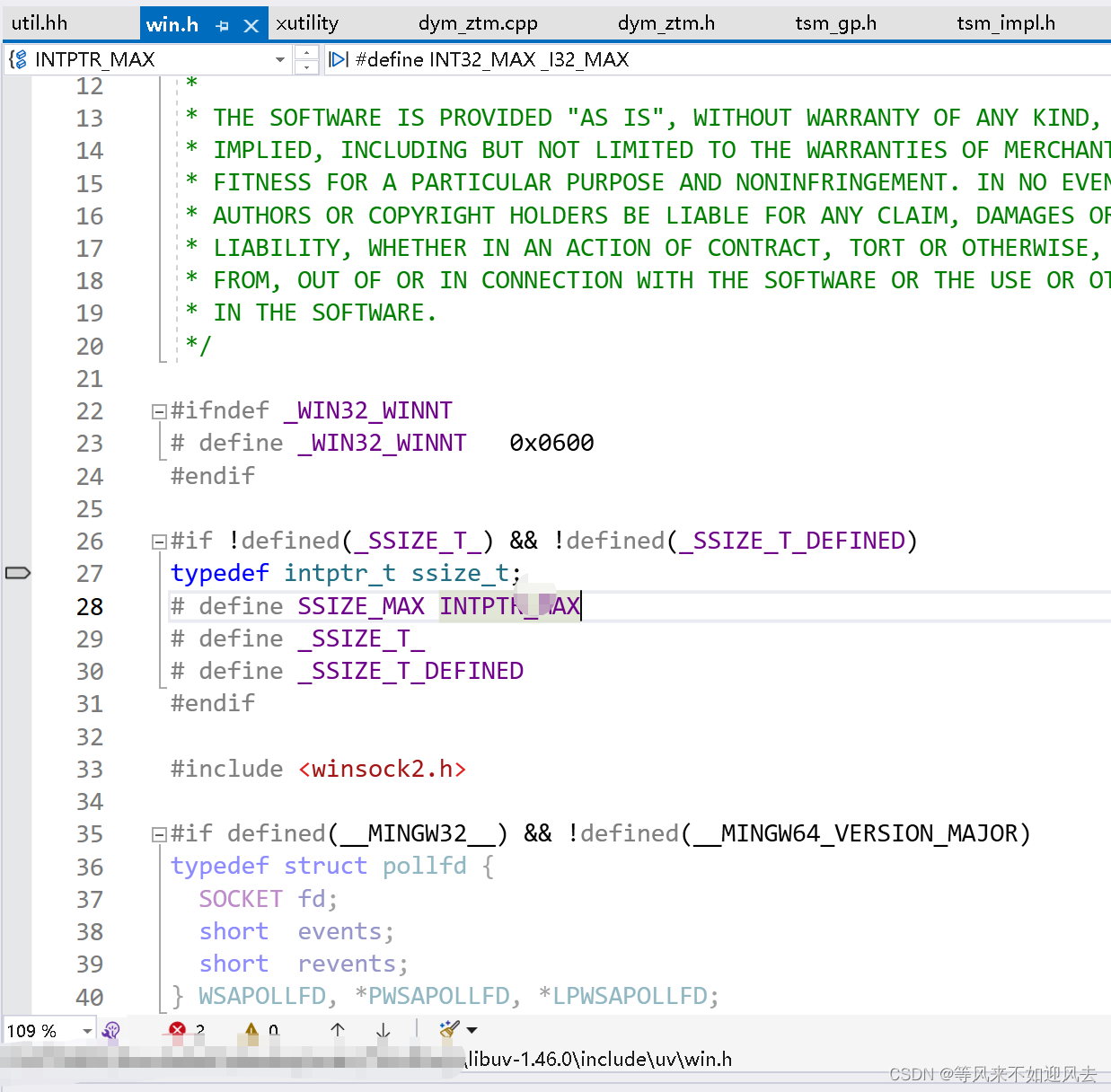
【libuv】与uvgrtrp的_SSIZE_T_定义不同
libuv的 #if !defined(_SSIZE_T_) && !defined(_SSIZE_T_DEFINED) typedef intptr_t ssize_t;...

安卓ROM定制 修改必备常识-----初步了解system系统分区文件夹的基本含义 【二】
安卓修改rom 固件 修改GSI 移植rom 必备常识 lib--**so文件基本解析 一起来了解system目录相应文件的用途吧。(rom版本不同里面的app也会不一样) 简单打开img格式后缀文件 给大家说下最简单的方法提取img里面的文件,对于后缀img格式的文件可…...

GPT会统治人类吗
一 前言 花了大概两天时间看完《这就是ChatGPT》,触动还是挺大的,让我静下来,认真地想一想,是否真正理解了ChatGPT,又能给我们以什么样的启发。 二 思考 在工作和生活中,使用ChatGPT或文心一言,…...
win系统环境搭建(六)——Windows安装nginx
windows环境搭建专栏🔗点击跳转 win系统环境搭建(六)——Windows安装nginx 本系列windows环境搭建开始讲解如何给win系统搭建环境,本人所用系统是腾讯云服务器的Windows Server 2022,你可以理解成就是你用的windows10…...

Java中使用BigDecimal类相除保留两位小数
问题 遇到2个数相除,需要保留2位小数的结果。 解决 BigDecimal sum ...; BigDecimal yearValue ...;MathContext mathContext new MathContext(2, RoundingMode.DOWN); yearValue.divide(sum, mathContext);...

硅应变计与Σ-Δ ADC协同设计及温度补偿技术
1. 硅应变计与Σ-Δ ADC的协同优势解析硅基应变计在现代传感器领域占据重要地位,其核心原理基于压阻效应——当硅材料发生机械形变时,晶格结构变化导致载流子迁移率改变,从而引起电阻值变化。与传统金属箔应变计相比,硅应变计的灵…...

Windows系统mfc140.dll文件丢失无法启动程序解决
在使用电脑系统时经常会出现丢失找不到某些文件的情况,由于很多常用软件都是采用 Microsoft Visual Studio 编写的,所以这类软件的运行需要依赖微软Visual C运行库,比如像 QQ、迅雷、Adobe 软件等等,如果没有安装VC运行库或者安装…...

Spring Boot 2026教育技术演示项目全栈架构与工程实践解析
1. 项目概述:一个面向未来的教育技术演示 最近在整理开源项目时,我注意到了 holzerjm/GACEP-Spring-2026-demo 这个仓库。乍一看,这个标题信息量不小,它像是一个技术演示,但前缀 GACEP 和 Spring-2026 又透露出…...

i.MX 6UL/6ULL开发环境配置与驱动开发实战
1. i.MX 6UL/6ULL开发环境配置实战1.1 虚拟机环境搭建要点对于Windows平台下的i.MX开发,VirtualBox虚拟机是最经济实惠的选择。根据实际项目经验,建议配置如下:内存至少4GB(复杂项目推荐8GB)硬盘空间预留100GB…...
:核心抽象层 —— 块 、分区 、inode 从原理到实操)
【Linux 指南】文件系统系列(二):核心抽象层 —— 块 、分区 、inode 从原理到实操
上一篇我们吃透了磁盘的底层原理,搞懂了磁盘通过 CHS/LBA 寻址定位扇区,也知道扇区是磁盘硬件的最小读写单位(512 字节)。但随之而来的两个核心问题摆在眼前:一是逐个扇区读写磁盘效率极低,磁头的寻道和旋转…...
)
别再只用memcpy了!手把手教你用memcpy_s写出更安全的C语言代码(附VS2022实战)
从memcpy到memcpy_s:现代C语言安全编程实战指南 在Visual Studio 2022的编译输出窗口中,那个刺眼的C4996警告已经成为许多C语言开发者的"老朋友"。当看到"error C4996: memcpy: This function or variable may be unsafe"时…...

LangGraph大模型脚手架实战:揭秘6种爆款智能体设计模式,玩转生产级Agent开发!
最近Herness大火,我就在反思,我们在日常进行智能体开发的过程中,是否也在做类似的事,我们用过claude code sdk、codex sdk、copilot cli等通用agent做封装,也用过dify或者coze搭工作流,也用过langchain做过…...

十大类型学系统性阐释:自感痕迹论的发生学分类体系
十大类型学系统性阐释:自感痕迹论的发生学分类体系引言:类型学作为公理的微分展开一个完备的发生学体系,不应满足于对单一现象的孤立分类。它应当从少数基本公设出发,在不同分析层面自然衍生出互相关联又各具独立性的类型学。自感…...

Go语言匿名函数如何写_Go语言匿名函数和闭包教程【对比】
Go匿名函数写作func(参数)返回类型{函数体},需完整声明;闭包是匿名函数引用外层局部变量并逃逸出作用域时形成的行为结果,捕获变量引用而非值。Go 里匿名函数怎么写,直接上手就用Go 的匿名函数就是没名字的函数字面量,…...
 - Android 反编译器和调试器)
JEB Pro 5.40 (macOS, Linux, Windows) - Android 反编译器和调试器
JEB Pro 5.40 (macOS, Linux, Windows) - 逆向工程平台 Reverse Engineering for Professionals. 请访问原文链接:https://sysin.org/blog/jeb/ 查看最新版。原创作品,转载请保留出处。 作者主页:sysin.org JEB Decompiler JEB 是逆向工程…...