图像处理与计算机视觉--第一章-计算机视觉简介-10问
| 第一章-计算机视觉简介-10问 |
| 1.CV与AI的关系是什么? |
CV(Computer Vision)是Al的子领域,它致力于使计算机能够理解和解释图像和数据,CV借助AI技术,比如深度学习/机器学习,实现目标识别,分析和处理任务。AI提供了CV所需要的算法和模型,使得计算机能够自动从图像和视频中提取信息,对于自动化,智能化以及自主系统的实现有着非常重要的作用。
| 2.Marr教授把CV划分 为哪三阶段? |
Marr理论把视觉过程划分为三个阶段:
第一阶段将输入的图像作原始的处理,抽取图像中诸如角点、边缘、纹理、线条、边界等基本特征,这些特征的集合称为基元图。
第二阶段在以观测者为观测坐标的中心,由输入图像和基元图恢复场景可见部分的深度、法线方向、轮廓等,这些信息的包含了深度信息,但不是真正的物体三维表示,因此,称为二维半图(2.5D)。
第三阶段在以物体为中心的坐标系中,由输入图像、基元图、二维半图来恢复、表示和识别三维物体
| 3.21 世纪CV快速发展得益于哪些方法或技术的运用?请列出两个以上 |
1.深度学习:深度神经网络的出现以及广泛的应用在图像处理任务上,特别是CNN(卷积神经网络)的出现,大大提高了计算机视觉的性能,开源的深度学习框架如TensorFlow和PyTorch的兴起,使得越来越多的人开始接触深度学习的领域。
2.计算能力:图形处理单元GPU和专用硬件的发展加速了CV算法的训练和推断速度。
3.大规模数据集:互联网上可用的大规模图像和视频数据集使CV模型能够更好地学习和泛化。
| 4.CV领域尚未解决的关键问题有哪些?请列出三个以上。 |
1.物体遮挡:如何处理部分遮挡的物体,以更好地理解场景,目前CV领域对于物体遮挡类的问题还是无从下手,如何更好的去还原和模拟物体遮挡的场景,CV领域在这个方面还有很长的路要去走。
2.视觉推理:如何使计算机进行更深层次的视觉推理,例如理解物体之间的因果关系,对于复杂场景上的模型,CV领域仍然不能如同人眼那般去做处理,对于视觉的推断不够智能呢个,只能做简单场景的推断。
3.不确定性处理:如何更好地处理不确定性,特别是在复杂环境中的目标跟踪和场景理解。
| 5.请列出三个CV的主要应用领域。 |
1.图像分类和物体识别:将图像中的物体分类为预定义的类别。
2.目标检测和跟踪:检测和跟踪视频中的特定物体或目标。
3.人脸识别和生物特征识别:识别人脸或生物特征以进行身份验证和安全应用,这是计算机视觉最为广泛的应用场景了。
4.机器人视觉处理: 机器人的兴起和发展离不开计算机视觉的发展和进步,准确来说,失去了计算机视觉的帮助,机器人就会像无头苍蝇一样,所以计算机视觉在机器人的发展中起到至关重要的作用。
| 6.请列出人眼视觉结构与成像系统结构的区别与联系? |
1.视觉结构与系统结构的区别:人眼视觉结构是生物系统,包括眼球、视网膜、神经系统等,用于感知和理解视觉信息。成像系统结构是工程系统,如摄像机、传感器和处理器,用于捕获和处理图像信息。
2.视觉结构与系统结构的联系:成像系统的设计受到人眼视觉的启发,例如,摄像机的镜头和传感器安排模仿了眼睛的结构。同时,CV领域的研究也借鉴了人眼视觉的一些特性,如边缘检测和色彩感知。
| 7.机器人按照功能可以划分为哪三类? |
机器人按功能分被分为以下3类:
1.工业机器人:这类机器人用于执行物理任务和基本的工程任务,如现实生活执行简单物品的安装和工厂内的加工型机器人。
2.服务机器人:这类机器人的涵盖范围非常广泛,目前比较多的用途有:物流配送性机器人,人机交互性机器人(迎宾机器人和引导机器人较多),以及安防巡逻机器人。
3.特种机器人:国内一般会把这类机器人单独列出,因为这一部分的机器人我们通常都是见不到的,其常常用到在特定的领域以及特定的场景之下,用途非常的单一,比如核电检修机器人,月球车机器人等等,这种机器人千差万别,通用性很差。
| 8.主动视觉与被动视觉区别是什么? |
主动视觉(Active Vision):主动视觉涉及机器或系统主动选择视觉信息,并采取措施来改变视点或获取更多信息。例如,一个机器人可以移动其摄像头以查看不同角度的场景。
被动视觉(Passive Vision):被动视觉是指系统接收来自外部世界的视觉信息,而不采取主动措施来改变视点或获取信息。例如,一个普通的摄像机只能记录其视野中的内容。
结合PPT内容的回答:
主动视觉在识别方面采用投射结构光向测量目标的表面贴上人造的纹理来解决对应点匹配问题,而被动视觉则是采用输入视点或者图像的数目来处理识别问题的这样的方法在处理单目视觉的问题上还能够行的通,但是在处理立体视觉的问题上,容易受到纹理/关照/反射率等因素的影响。
| 9.请尝试回答VR与AR的区别与联系? |
•VR (Virtual Reality,虚拟现实):是一种通过计算机模拟真实感的图像,声音和其他感觉,从而复制出一个真实或者假想的场景,并且让人觉得身处这个场景之中,还能够与这个场景发生交互。
•AR (Augmented Reality, 增强现实):是一种直接或间接地观察真实场景,但其内容通过计算机生成的组成部分被增强,计算机生成的部分包括图像,声音,视频或其他类型的信息。
综上所述,AR和VR的最为本质的区别就是AR需要尽可能与现实相结合而VR需要极可能多的隔绝现实。同时两者对于硬件的要求也不一样,AR需要对于场景进行理解,对于CPU的要求高,对于GPU的要求反而低了,而VR需要涉及丰富的图形资源,所以对于GPU的要求高,对于CPU的要求较低。同时AR和VR的联系是两者都是通过计算机信息技术来绘制虚拟图像。
| 10.请列出与CV关系密切的三个研究领域 |
•图像识别:图像处理领域时计算机视觉研究最多的开端,如何更为高效的研究器图像识别是发展计算机视觉的第一环节。
•图像处理:图像处理领域时计算机视觉研究和应用最多的领域,对于图像进行更好的处理,获取更多有用的信心组合是支撑计算机视觉在其他领域广泛应用的关键。
•机器学习:CV领域广泛使用机器学习技术,尤其是深度学习,来训练和优化图像识别和分析模型。CV领域广泛使用机器学习技术,尤其是深度学习,来训练和优化图像识别和分析模型。
相关文章:

图像处理与计算机视觉--第一章-计算机视觉简介-10问
第一章-计算机视觉简介-10问 1.CV与AI的关系是什么? CV(Computer Vision)是Al的子领域,它致力于使计算机能够理解和解释图像和数据,CV借助AI技术,比如深度学习/机器学习,实现目标识别,分析和处理任务。AI提供了CV所需要的算法…...

LeetCode 80. 删除有序数组中的重复项 II
文章目录 一、题目二、Java 题解 一、题目 给你一个有序数组 nums,请你 原地 删除重复出现的元素,使得出现次数超过两次的元素只出现两次 ,返回删除后数组的新长度。 不要使用额外的数组空间,你必须在 原地 修改输入数组 并在使用…...

【前端面试题】浏览器面试题
文章目录 前言一、浏览器面试问题1.cookie sessionStorage localStorage 区别2.如何写一个会过期的localStorage,说说想法2.如何定时删除localstorage数据2.localStorage 能跨域吗2.memory cache 如何开启2.localstorage的限制2.浏览器输入URL发生了什么2.浏览器如何…...

PHP 生成 PDF文件
参考官网 Example 009 : Image() TCPDF laravel 可以使用 composer 安装 tecnickcom/tcpdf 进行使用 //require_once("../app/Extend/tcpdf/tcpdf.php"); $pdf new TCPDF();// 设置文档信息$pdf->SetCreator(懒人开发网);$pdf->SetAuthor(懒人开发网);$…...
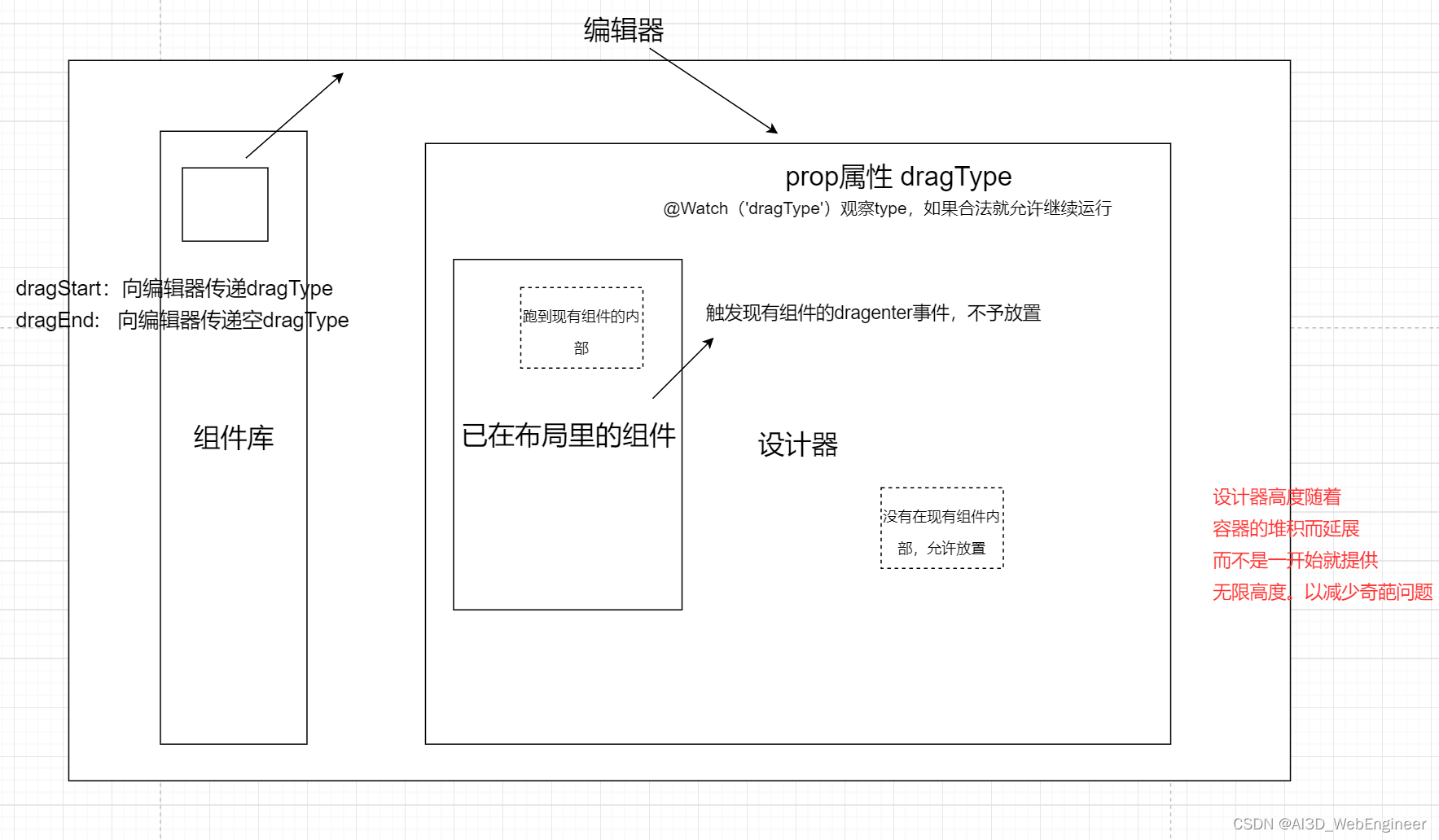
讲讲项目里的仪表盘编辑器(一)
需求 要做一个仪表盘系统,要求有: ① 设计功能(包括布局、大小、排列) ② 预览功能 ③ 运行功能 布局选择 做编辑器,肯定要先选择布局。 前端有几种常用布局。 静态布局 也叫文档布局。默认的网页形式…...

解决方案 | 如何构建市政综合管廊安全运行监测系统?
如何构建市政综合管廊安全运行监测系统?WITBEE万宾城市生命线智能监测仪器,5年免维护设计,集成10多项结构与气体健康监测指标,毫秒级快速响应,时刻感知综合管廊运行态势...
JCEF中js与java交互、js与java相互调用
jcef中js与java相互调用,java与js相互调用,chrome与java相互调用,java与chrome相互调用、jcef与java相互调用 前提:https://blog.csdn.net/weixin_44480167/article/details/133170970(java内嵌浏览器CEF-JAVA、jcef、…...

9.20 校招 实习 内推 面经
绿泡*泡: neituijunsir 交流裙 ,内推/实习/校招汇总表格 1、校招丨智行者2024年校园招聘正式启动啦 校招丨智行者2024年校园招聘正式启动啦 2、校招 | 乐动机器人2024校园招聘 校招 | 乐动机器人2024校园招聘 3、校招丨小天才2024届秋季校园招聘 …...
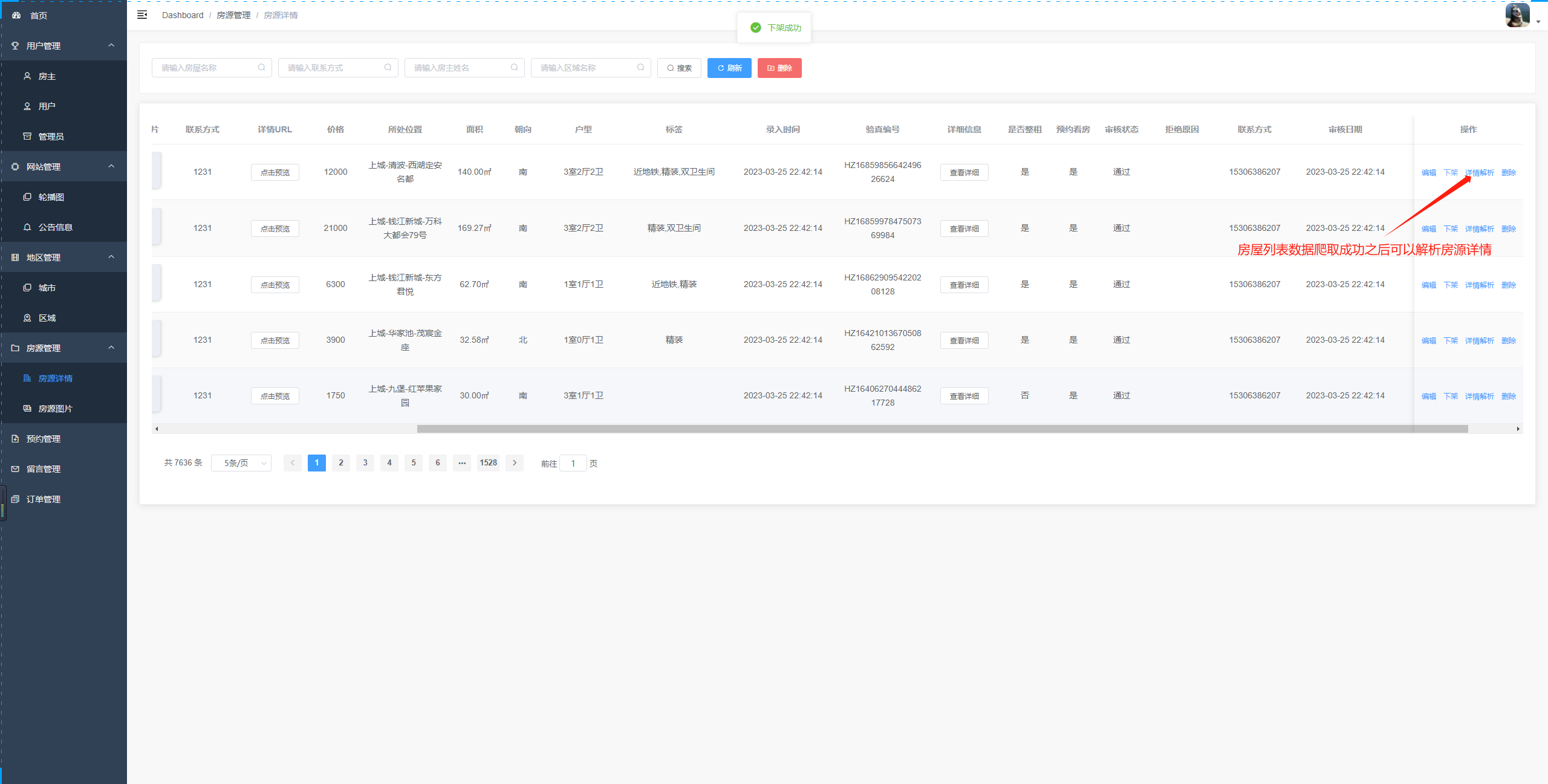
基于JAVA+SpringBoot+Vue+协同过滤算法+爬虫的前后端分离的租房系统
✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取项目下载方式🍅 一、项目背景介绍: 随着城市化进程的加快…...
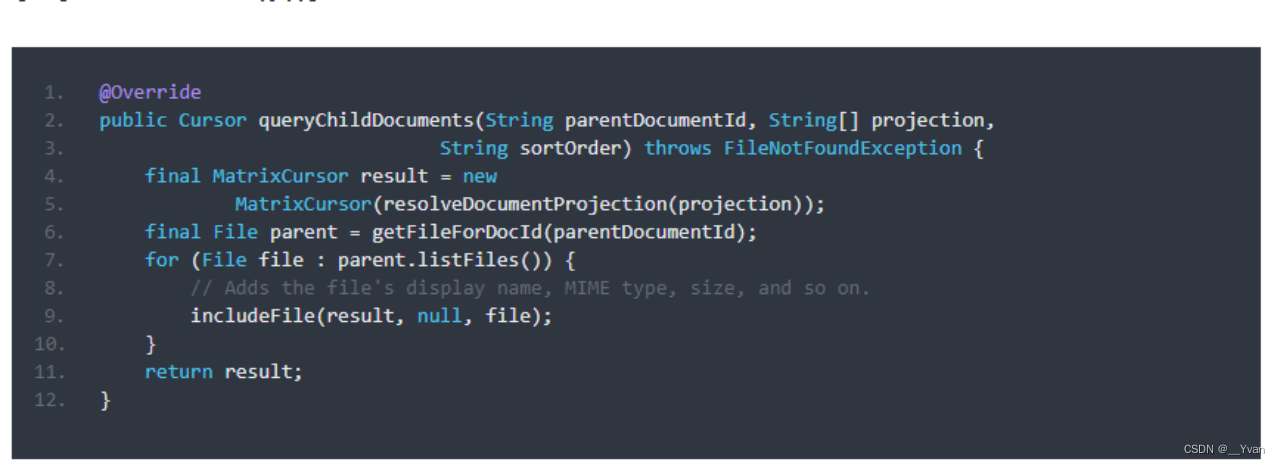
【Android Framework系列】第16章 存储访问框架 (SAF)
1 概述 Android 4.4(API 级别 19)引入了存储访问框架 (Storage Access Framework)。SAF让用户能够在其所有首选文档存储提供程序中方便地浏览并打开文档、图像以及其他文件。 用户可以通过易用的标准 UI,以统一方式在所有应用和提供程序中浏…...
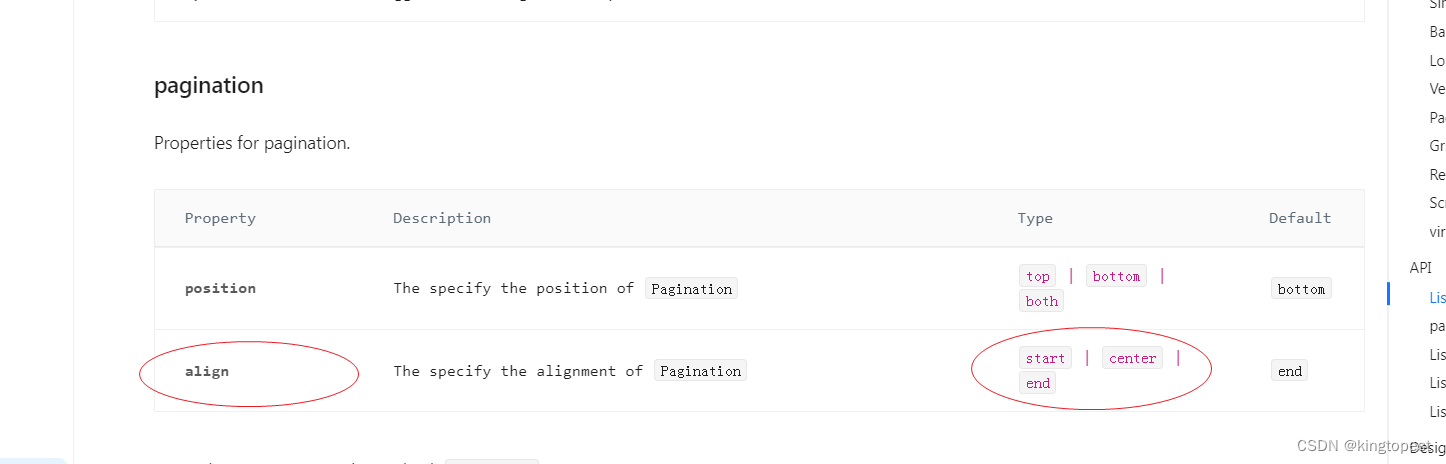
Antdesign 4中让分页组件居中显示的方法
在Ant Design 4中分页组件默认是最右边显示的,而这个没有设置位置的属性的 解决办法: 在pagination的属性中增加: style: {textAlign: "center"} 在Ant Design 5中可以让pagination使用align: center来实现分页组件居中...
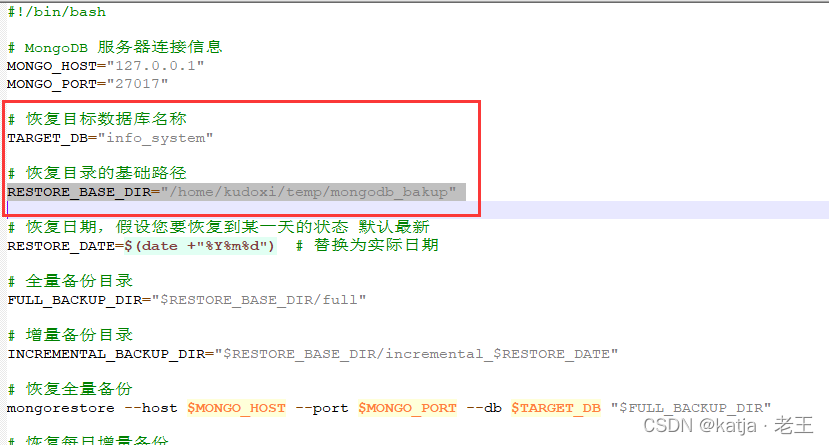
【笔记】ubuntu 20.04 + mongodb 4.4.14定时增量备份脚本
环境 ubuntu 20.04mongodb 4.4.14还没实际使用(20230922)后续到10月底如果有问题会修改 原理 只会在有新增数据时生成新的备份日期目录备份恢复时,如果恢复的数据库未删除,则会覆盖数据 准备 准备一个文件夹,用于…...

c++实现的一个定时器实例
/* * author: hjjdebug * date : 2023年 09月 23日 星期六 11:52:29 CST * description: 用std::thread 实现了一个定时器,深刻理解一下定时器是怎样工作的. * 参考Timer.h, Timer.cpp */ $ cat main.cpp #include "Timer.h" #include <unis…...
Python线程和进程
1、深度解析Python线程和进程 一篇文章带你深度解析Python线程和进程 - 知乎使用Python中的线程模块,能够同时运行程序的不同部分,并简化设计。如果你已经入门Python,并且想用线程来提升程序运行速度的话,希望这篇教程会对你有所帮…...
)
算法 寻找峰值-(二分查找+反向双指针)
牛客网: BM19 题目: 寻找数组峰值,可能多个返回任一个,每个值满足nums[i] ! nums[i 1] 思路: 双指针 left 0, right n-1, 相向而行,取中间位置mid, nums[mid]与nums[mid1]比较,如果nums[mid] < nums[mid1],说明…...

【数据结构】—交换排序之快速排序究极详解,手把手带你从简单的冒泡排序升级到排序的难点{快速排序}(含C语言实现)
食用指南:本文在有C基础的情况下食用更佳 🔥这就不得不推荐此专栏了:C语言 ♈️今日夜电波:靴の花火—ヨルシカ 0:28━━━━━━️💟──────── 5:03 …...
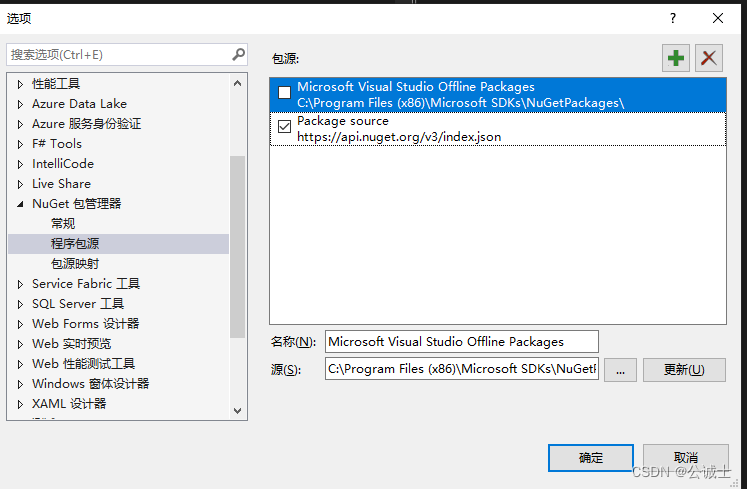
【c#-Nuget 包“在此源中不可用”】 Nuget package “Not available in this source“
标题c#-Nuget 包“在此源中不可用”…但 VS 仍然知道它吗? (c# - Nuget package “Not available in this source”… but VS still knows about it?) 背景: 今日从公司svn 上拉取很久很久以前的代码,拉取下来200报错,进一步发…...
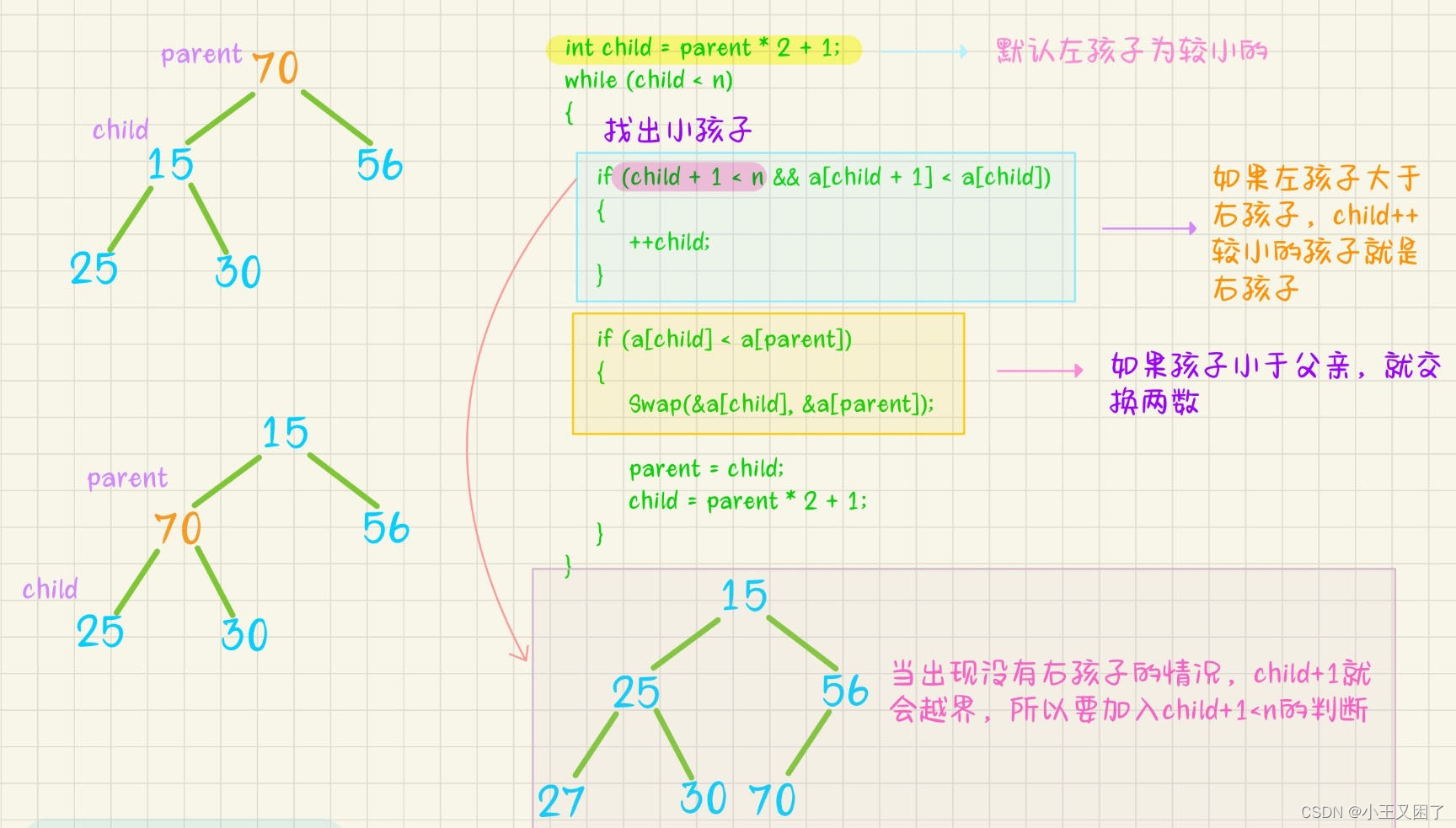
【数据结构】二叉树之堆的实现
🔥博客主页:小王又困了 📚系列专栏:数据结构 🌟人之为学,不日近则日退 ❤️感谢大家点赞👍收藏⭐评论✍️ 目录 一、二叉树的顺序结构 📒1.1顺序存储 📒1.2堆的性质…...
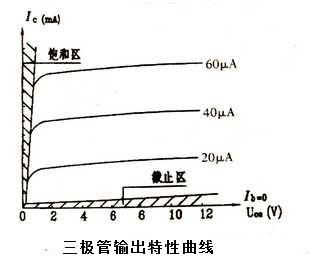
电工-三极管输入输出特性曲线讲解
三极管特性曲线是反映三极管各电极电压和电流之间相互关系的曲线,是用来描述晶体三极管工作特性曲线,常用的特性曲线有输入特性曲线和输出特性曲线。这里以下图所示的共发射极电路来分析三极管的特性曲线。 输入特性曲线 该曲线表示当e极与c极之间的电…...
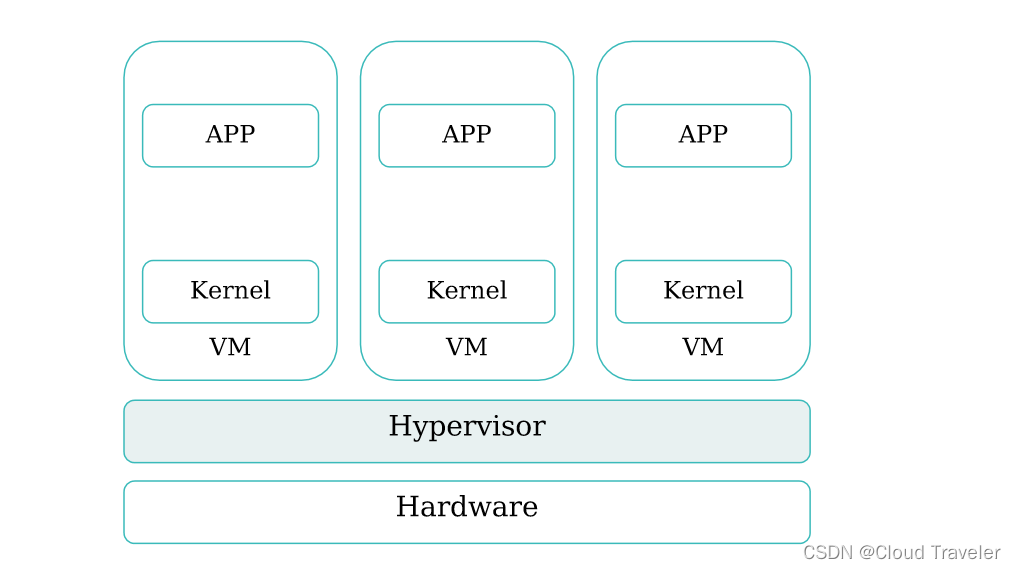
深入解析容器与虚拟化:技术、对比与生态
深入解析容器与虚拟化:技术、对比与生态 文章目录 深入解析容器与虚拟化:技术、对比与生态容器和虚拟化的基本概念和原理容器的定义和特点虚拟化的定义和特点 容器使用场景容器和虚拟机的对比虚拟化技术的四个特点容器实现虚拟化的原理常见容器引擎和容器…...

从编码到网络:GLM模型在图论分析中的实战指南
1. GLM模型与图论分析的完美结合 第一次接触GLM模型是在分析脑网络数据时,当时手头有一批健康人和患者的脑功能连接数据,需要找出两组间的差异。传统方法只能逐个节点比较,效率低下且容易漏掉整体网络特征。直到发现GLM模型可以完美融入图论分…...

告别SkewT斜温图:用Python的metpy库手把手绘制国内气象局标准T-LnP探空图
用Python的metpy库绘制符合国内气象标准的T-LnP探空图全指南 气象数据可视化是天气分析和预报中不可或缺的一环。在国内气象业务和教学中,T-LnP图(温度-对数压力图)作为探空分析的标准工具已有数十年历史。然而,许多气象工作者在使…...

基于Mac Studio搭建本地AI协作环境:从Ollama到LangChain的完整实践
1. 项目概述:当Mac Studio遇上本地AI协作如果你手头有一台Mac Studio,无论是M1 Ultra还是M2 Max,大概率是冲着它强悍的媒体处理能力或者流畅的开发体验去的。但你可能没意识到,这台性能怪兽,正是一个搭建个人或小团队私…...

三步解锁Chrome浏览器中的Markdown阅读新体验
三步解锁Chrome浏览器中的Markdown阅读新体验 【免费下载链接】markdownReader markdownReader is a extention for chrome, used for reading markdown file. 项目地址: https://gitcode.com/gh_mirrors/ma/markdownReader 在Chrome浏览器中直接打开Markdown文件时&…...
为你的云盘文件打造精细到‘行’的访问控制)
告别简单门禁:用KP-ABE(密钥策略属性基加密)为你的云盘文件打造精细到‘行’的访问控制
告别简单门禁:用KP-ABE为云盘文件打造精细到"行"的访问控制 想象一下这样的场景:一份包含市场预算、产品路线图和财务数据的项目文档,需要让市场团队查看营销章节但隐藏成本细节,允许产品经理编辑技术方案但仅能阅读财务…...

遗传算法混合动力汽车控制策略【附代码】
✨ 长期致力于混合动力汽车、能量管理策略、模糊控制、遗传算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)多目标分层编码与种群初始化策略&…...

收藏必备!小白程序员轻松入门大模型:RAG效果调优全攻略
收藏必备!小白程序员轻松入门大模型:RAG效果调优全攻略 本文深入解析RAG(检索增强生成)效果调优,强调上下文质量对大模型回答的关键作用。文章指出,上下文召回率和准确率是调优的关键指标,分别对…...

从‘ylim auto’到‘ylim manual’:深入理解Matlab坐标轴范围管理机制与性能优化
从‘ylim auto’到‘ylim manual’:深入理解Matlab坐标轴范围管理机制与性能优化 在数据可视化领域,Matlab作为一款强大的科学计算工具,其图形系统的精细控制能力常常被低估。当我们处理静态数据时,坐标轴范围的自动调整ÿ…...

在华为云鲲鹏ARM服务器上,从零编译ClickHouse v20.3.19.4的完整踩坑实录
在华为云鲲鹏ARM服务器上从零构建ClickHouse的实战指南 当企业级数据分析需求遇上ARM架构的云服务器,传统x86环境下的经验往往不再适用。作为一款开源的列式数据库管理系统,ClickHouse凭借其卓越的OLAP性能吸引了众多开发者,但在华为云鲲鹏AR…...

基于Docker Compose的容器化配置管理:从基础设施即代码到可观测性实践
1. 项目概述:一个为“懒人”准备的容器化配置管理工具如果你和我一样,经常需要部署和维护各种基于容器的服务,比如家庭媒体服务器、个人开发环境,或者是一些小型项目的后端,那你一定对重复的配置工作深恶痛绝。每次新开…...