二十,镜面IBL--打印BRDF积分贴图
比起以往,这节应该是最轻松的了,
运行结果如下
代码如下:
#include <osg/TextureCubeMap>
#include <osg/TexGen>
#include <osg/TexEnvCombine>
#include <osgUtil/ReflectionMapGenerator>
#include <osgDB/ReadFile>
#include <osgViewer/Viewer>
#include <osg/NodeVisitor>
#include <osg/ShapeDrawable>
#include <osg/Texture2D>
#include <osgDB/WriteFile>
static const char * vertexShader =
{
“in vec3 aPos;\n”
“in vec2 texcoord;”
“varying vec2 TexCoords;\n”
“void main(void)\n”
“{\n”
“TexCoords = texcoord;\n”
“gl_Position = ftransform();\n”
//“gl_Position = view * view * vec4(aPos,1.0);”
“}\n”
};
static const char psShader =
{
“#version 330 core \n”
“out vec2 FragColor; \n”
“in vec2 TexCoords; \n”
" \n"
“const float PI = 3.14159265359; \n”
“// ---------------------------------------------------------------------------- \n”
“// http://holger.dammertz.org/stuff/notes_HammersleyOnHemisphere.html \n”
“// efficient VanDerCorpus calculation. \n”
“float RadicalInverse_VdC(uint bits) \n”
“{ \n”
" bits = (bits << 16u) | (bits >> 16u); \n"
" bits = ((bits & 0x55555555u) << 1u) | ((bits & 0xAAAAAAAAu) >> 1u); \n"
" bits = ((bits & 0x33333333u) << 2u) | ((bits & 0xCCCCCCCCu) >> 2u); \n"
" bits = ((bits & 0x0F0F0F0Fu) << 4u) | ((bits & 0xF0F0F0F0u) >> 4u); \n"
" bits = ((bits & 0x00FF00FFu) << 8u) | ((bits & 0xFF00FF00u) >> 8u); \n"
" return float(bits) * 2.3283064365386963e-10; // / 0x100000000 \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“vec2 Hammersley(uint i, uint N) \n”
“{ \n”
" return vec2(float(i) / float(N), RadicalInverse_VdC(i)); \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“vec3 ImportanceSampleGGX(vec2 Xi, vec3 N, float roughness) \n”
“{ \n”
" float a = roughnessroughness; \n"
" \n"
" float phi = 2.0 * PI * Xi.x; \n"
" float cosTheta = sqrt((1.0 - Xi.y) / (1.0 + (aa - 1.0) * Xi.y)); \n"
" float sinTheta = sqrt(1.0 - cosThetacosTheta); \n"
" \n"
" // from spherical coordinates to cartesian coordinates - halfway vector \n"
" vec3 H; \n"
" H.x = cos(phi) * sinTheta; \n"
" H.y = sin(phi) * sinTheta; \n"
" H.z = cosTheta; \n"
" \n"
" // from tangent-space H vector to world-space sample vector \n"
" vec3 up = abs(N.z) < 0.999 ? vec3(0.0, 0.0, 1.0) : vec3(1.0, 0.0, 0.0); \n"
" vec3 tangent = normalize(cross(up, N)); \n"
" vec3 bitangent = cross(N, tangent); \n"
" \n"
" vec3 sampleVec = tangent * H.x + bitangent * H.y + N * H.z; \n"
" return normalize(sampleVec); \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“float GeometrySchlickGGX(float NdotV, float roughness) \n”
“{ \n”
" // note that we use a different k for IBL \n"
" float a = roughness; \n"
" float k = (a * a) / 2.0; \n"
" \n"
" float nom = NdotV; \n"
" float denom = NdotV * (1.0 - k) + k; \n"
" \n"
" return nom / denom; \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“float GeometrySmith(vec3 N, vec3 V, vec3 L, float roughness) \n”
“{ \n”
" float NdotV = max(dot(N, V), 0.0); \n"
" float NdotL = max(dot(N, L), 0.0); \n"
" float ggx2 = GeometrySchlickGGX(NdotV, roughness); \n"
" float ggx1 = GeometrySchlickGGX(NdotL, roughness); \n"
" \n"
" return ggx1 * ggx2; \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“vec2 IntegrateBRDF(float NdotV, float roughness) \n”
“{ \n”
" vec3 V; \n"
" V.x = sqrt(1.0 - NdotV*NdotV); \n"
" V.y = 0.0; \n"
" V.z = NdotV; \n"
" \n"
" float A = 0.0; \n"
" float B = 0.0; \n"
" \n"
" vec3 N = vec3(0.0, 0.0, 1.0); \n"
" \n"
" const uint SAMPLE_COUNT = 1024u; \n"
" for (uint i = 0u; i < SAMPLE_COUNT; ++i) \n"
" { \n"
" // generates a sample vector that’s biased towards the \n"
" // preferred alignment direction (importance sampling). \n"
" vec2 Xi = Hammersley(i, SAMPLE_COUNT); \n"
" vec3 H = ImportanceSampleGGX(Xi, N, roughness); \n"
" vec3 L = normalize(2.0 * dot(V, H) * H - V); \n"
" \n"
" float NdotL = max(L.z, 0.0); \n"
" float NdotH = max(H.z, 0.0); \n"
" float VdotH = max(dot(V, H), 0.0); \n"
" \n"
" if (NdotL > 0.0) \n"
" { \n"
" float G = GeometrySmith(N, V, L, roughness); \n"
" float G_Vis = (G * VdotH) / (NdotH * NdotV); \n"
" float Fc = pow(1.0 - VdotH, 5.0); \n"
" \n"
" A += (1.0 - Fc) * G_Vis; \n"
" B += Fc * G_Vis; \n"
" } \n"
" } \n"
" A /= float(SAMPLE_COUNT); \n"
" B /= float(SAMPLE_COUNT); \n"
" return vec2(A, B); \n"
“} \n”
“// ---------------------------------------------------------------------------- \n”
“void main() \n”
“{ \n”
" vec2 integratedBRDF = IntegrateBRDF(TexCoords.x, TexCoords.y); \n"
" FragColor = integratedBRDF; \n"
“} \n”
};
osg::ref_ptrosg::Texture2D createFloatRectangleTexture(int width, int height)
{
osg::ref_ptrosg::Texture2D tex2D = new osg::Texture2D;
tex2D->setTextureSize(width, height);
tex2D->setInternalFormat(GL_RGBA16F_ARB);
tex2D->setSourceFormat(GL_RGBA);
tex2D->setSourceType(GL_FLOAT);
tex2D->setFilter(osg::Texture2D::MIN_FILTER, osg::Texture2D::LINEAR);
tex2D->setFilter(osg::Texture2D::MAG_FILTER, osg::Texture2D::LINEAR);
tex2D->setWrap(osg::Texture::WRAP_S, osg::Texture::CLAMP_TO_EDGE);
tex2D->setWrap(osg::Texture::WRAP_T, osg::Texture::CLAMP_TO_EDGE);
return tex2D.release();
}
osg::ref_ptrosg::Geode createTexturePanelGeode()
{
osg::ref_ptrosg::Vec3Array vertices = new osg::Vec3Array;
vertices->push_back(osg::Vec3(-1.0f, -1.0f, 0.0f));
vertices->push_back(osg::Vec3(1.0f, -1.0f, 0.0f));
vertices->push_back(osg::Vec3(1.0f, 1.0f, 0.0f));
vertices->push_back(osg::Vec3(-1.0f, 1.0f, 0.0f));
osg::ref_ptr<osg::Vec2Array> texCoord = new osg::Vec2Array;
texCoord->push_back(osg::Vec2(0.0, 0.0));
texCoord->push_back(osg::Vec2(1.0, 0.0));
texCoord->push_back(osg::Vec2(1.0, 1.0));
texCoord->push_back(osg::Vec2(0.0, 1.0));osg::ref_ptr<osg::Geometry> geom = new osg::Geometry;
geom->setVertexArray(vertices);
geom->setTexCoordArray(0, texCoord);
geom->addPrimitiveSet(new osg::DrawArrays(GL_QUADS, 0, 4));geom->setVertexAttribArray(1, vertices, osg::Array::BIND_PER_VERTEX);
geom->setVertexAttribArray(2, texCoord, osg::Array::BIND_PER_VERTEX);osg::ref_ptr<osg::Geode> geode = new osg::Geode;
geode->addDrawable(geom);
return geode;
}
int main()
{
//std::string strHDRImageName = “D:/tutorial/LearnOpenGL-master/LearnOpenGL-master/resources/textures/hdr/newport_loft.hdr”;
//osg::ref_ptrosg::Image image = osgDB::readImageFile(strHDRImageName);
//
//int imageWidth = image->s();
//int imageHeight = image->t();
int texWidth = 512;
int texHeight = 512;
osg::ref_ptrosg::Texture2D tex = createFloatRectangleTexture(texWidth, texHeight);
osg::ref_ptrosg::Geode panelGeode = createTexturePanelGeode();
osg::ref_ptr<osg::Camera> finalCamera = new osg::Camera;osg::ref_ptr<osg::StateSet> stateset = finalCamera->getOrCreateStateSet();
stateset->setTextureAttributeAndModes(0, tex);
finalCamera->addChild(panelGeode);
finalCamera->setReferenceFrame(osg::Camera::ABSOLUTE_RF);finalCamera->setViewport(new osg::Viewport(0, 0, 512, 512));
osg::ref_ptr<osg::Image> printImage = new osg::Image;
printImage->allocateImage(512, 512, 1, GL_RGBA, GL_UNSIGNED_BYTE);
finalCamera->attach(osg::Camera::COLOR_BUFFER0, printImage); //关联采样贴图//shaderosg::ref_ptr<osg::Shader> vs1 = new osg::Shader(osg::Shader::VERTEX, vertexShader);
osg::ref_ptr<osg::Shader> ps1 = new osg::Shader(osg::Shader::FRAGMENT, psShader);
osg::ref_ptr<osg::Program> program1 = new osg::Program;
program1->addShader(vs1);
program1->addShader(ps1);
program1->addBindAttribLocation("aPos", 1);
program1->addBindAttribLocation("texcoord", 2);osg::ref_ptr<osg::Uniform> tex0Uniform = new osg::Uniform("tex0", 0);
stateset->addUniform(tex0Uniform);
stateset->setAttribute(program1, osg::StateAttribute::ON);osgViewer::Viewer viewer;
viewer.setSceneData(finalCamera.get());bool bPrinted = false;
while (!viewer.done())
{viewer.frame();if (!bPrinted){bPrinted = true;std::string strBRDFLUTImageName = "e:/hdr/lut/brdflut.bmp";osgDB::writeImageFile(*printImage, strBRDFLUTImageName);}
}
return 0;
}
相关文章:
二十,镜面IBL--打印BRDF积分贴图
比起以往,这节应该是最轻松的了, 运行结果如下 代码如下: #include <osg/TextureCubeMap> #include <osg/TexGen> #include <osg/TexEnvCombine> #include <osgUtil/ReflectionMapGenerator> #include <osgDB/Re…...

自动驾驶:未来的道路上的挑战与机遇
自动驾驶:未来的道路上的挑战与机遇 文章目录 引言安全与道路事故的减少交通拥堵的缓解城市规划的变革技术和法律挑战结语 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,…...

Go 语言 iota 的神奇力量
前言 当你深入研究官网库、开源库或者任何一个 Go 项目时,你都会发现 iota 这个神奇的标识符无处不在。它扮演着一种重要的角色,让代码变得更加简洁、清晰,并提高了可读性和可维护性。它的应用范围广泛,从枚举类型到位运算&#…...
前端开发和后端开发的一些建议
前端开发和后端开发是Web开发的两个方向 前端开发主要负责实现用户在浏览器上看到的界面和交互体验,包括HTML、CSS和JavaScript等技术。后端开发主要负责处理服务器端的逻辑和数据,包括数据库操作、服务器配置和接口开发等技术。 前端开发 前端开发需…...

基于 SpringBoot+Vue 的教室人事档案管理系统
1 简介 教师人事档案管理系统利用信息的合理管理,动态的、高效的、安全的实现了教师的各种需求,改变了传统的网上查看方式,使教师可以足不出户的在线查看最适合自己个人档案、奖惩信息、档案变动、培训报名或者新闻资讯。 1、教师后台功能模…...

Lua学习笔记:require非.lua拓展名的文件
前言 本篇在讲什么 Lua的require相关的内容 本篇需要什么 对Lua语法有简单认知 对C语法有简单认知 依赖Visual Studio工具 本篇的特色 具有全流程的图文教学 重实践,轻理论,快速上手 提供全流程的源码内容 ★提高阅读体验★ 👉 ♠…...

Python 编程基础 | 第三章-数据类型 | 3.3、浮点数
一、浮点数...
beego---ORM相关操作
Beego框架是go语言开发的web框架。 **那什么是框架呢?**就是别人写好的代码,我们可以直接使用!这个代码是专门针对某一个开发方向定制的,例如:我们要做一个网站,利用 beego 框架就能非常快的完成网站的开发…...
【网络原理】初始网络,了解概念
文章目录 1. 网络通信1.1 局域网LAN1.2 广域网WAN 2. 基础概念2.1 IP2.2 端口号 3. 认识协议4. 五元组5. 协议分层5.1 分层的作用5.2 OSI七层模型5.3 TCP/IP五层(四层)模型 6. 封装和分用 1. 网络通信 计算机与计算机之间是互相独立,是独立模…...
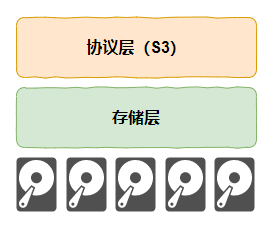
对象存储,从单机到分布式的演进
关于数据存储的相关知识,请大家关注“数据存储张”,各大平台同名。 通过《什么是云存储?从对象存储说起》我们对对象存储的历史、概念和基本使用有了一个大概的认识。而且我们以Minio为例,通过单机部署的模式实际操作了一下对象存储的GUI,感受了一下对象存储的用法。 在上…...
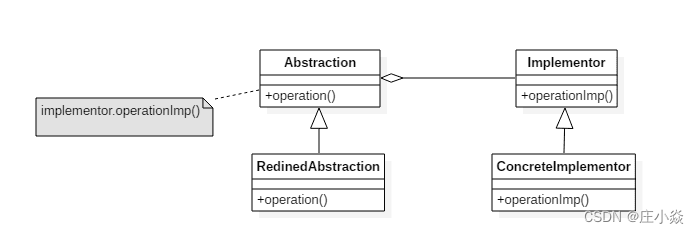
结构型设计模式——桥接模式
摘要 桥接模式(Bridge pattern): 使用桥接模式通过将实现和抽象放在两个不同的类层次中而使它们可以独立改变。 一、桥接模式的意图 将抽象与实现分离开来,使它们可以独立变化。 二、桥接模式的类图 Abstraction: 定义抽象类的接口Implementor: 定义实现类接口 …...

keepalived的vip实现nginx节点的主备
nginx wget http://nginx.org/download/nginx-1.18.0.tar.gz tar zxvf nginx-1.18.0.tar.gzyum install -y gcc gcc-c pcre pcre-devel zlib zlib-devel openssl openssl-devel libnl3-develcd nginx-1.18.0 mkdir -p /usr/local/nginx #需要使用https,在编译时启用…...

C++之std::atomic解决多线程7个问题(二百四)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 人生格言: 人生…...

tailwindcss 如何在 uniapp 中使用
直接使用https://tailwindcss.com/docs/guides/vite这篇官方教程的写法是跑不通的,摸索以后整理了一下,最关键的是第6步 npm install -D tailwindcss postcss autoprefixernpx tailwindcss init -p在 tailwind.config.js 中写入 export default {conten…...

oracle-使用PLSQL工具自行修改用户密码
1、使用PLSQL工具,输入用户名和原密码登录,如下图 2、登录后,在会话下拉菜单中找到”Change password..” 3、在跳出的窗口中配置新密码,修改完成后单击”确认”,后退出PLSQL 4、重新打开PLSQL,使用新密码登…...

自动驾驶技术:现状与未来
自动驾驶技术:现状与未来 文章目录 引言自动驾驶技术的现状自动驾驶技术的挑战自动驾驶技术的未来结论结论 2023星火培训【专项营】Apollo开发者社区布道师倾力打造,包含PnC、新感知等的全新专项课程上线了。理论与实践相结合,全新的PnC培训不…...
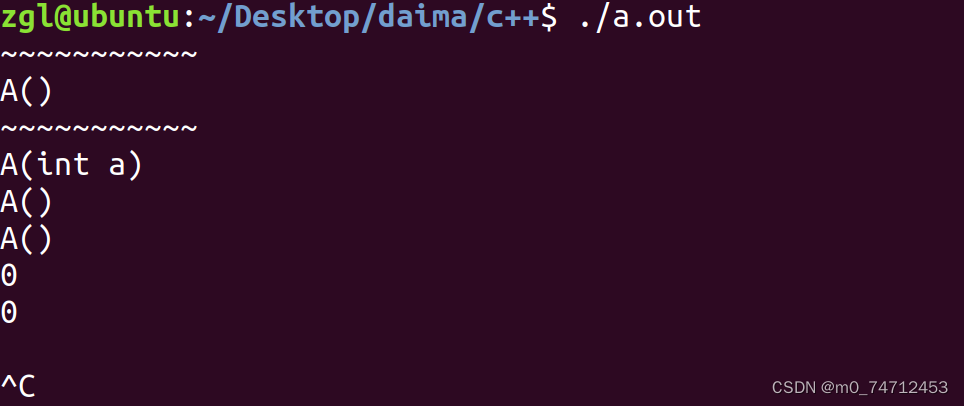
C++ 类构造函数 析构函数
类的构造函数 类的构造函数是类的一种特殊的成员函数,它会在每次创建类的新对象时执行。 构造函数的名称与类的名称是完全相同的,并且不会返回任何类型,也不会返回 void。构造函数可用于为某些成员变量设置初始值。 下面的实例有助于更好地…...
- 输入/输出操纵符-(std::get_time,std::put_time))
C++标准模板(STL)- 输入/输出操纵符-(std::get_time,std::put_time)
操纵符是令代码能以 operator<< 或 operator>> 控制输入/输出流的帮助函数。 不以参数调用的操纵符(例如 std::cout << std::boolalpha; 或 std::cin >> std::hex; )实现为接受到流的引用为其唯一参数的函数。 basic_ostream::…...

蓝桥等考Python组别九级004
第一部分:选择题 1、Python L9 (15分) 运行下面程序,可以输出几行“*”?( ) for i in range(3): for j in range(4): print(*, end = ) print() 2345正确答案:B 2、Python L9...

gitee 远程仓库操作基础(二)
(1)clone远端仓库,本地建立分支推送 (基于远程仓库版本库 本地建立分支开发新功能) git clone gitgitee.com:xxxxx/alsa_test.git git remote add origin gitgitee.com:xxxxx/alsa_test.git进入clone过后路径代码,查看本地分支,发现该项目远程仓库有很多分支 基于…...

星火动漫 × 火山引擎:用Seedance重构创作链路加速释放AI漫剧生产力
20 天能做什么?在传统动漫制作的管线里,这点时间或许只够画完一套分镜稿。但就是在这短短 20 天内,一部名为《西游:五指山上贴瓷砖》的漫剧不仅完成了全流程制作,更一路杀出重围,连续多日霸榜。若按常规路径…...

监区越界预警革命:UWB单点局限,无感定位全域穿透式风控
监区越界预警革命:UWB单点局限,无感定位全域穿透式风控一、行业现状:传统UWB定位管控的单点式致命短板当前国内绝大多数智慧监区、看守所、戒毒所的人员越界预警与区域管控体系,仍高度依赖UWB穿戴式定位技术,依托定位基…...
)
保姆级教程:在Ubuntu 22.04上从源码编译RISC-V SPIKE模拟器(含libboost报错解决)
从零构建RISC-V开发环境:Ubuntu 22.04下SPIKE模拟器深度编译指南 当第一次接触RISC-V生态时,搭建可靠的开发环境往往成为新手面临的第一个挑战。作为RISC-V官方推荐的指令集模拟器,SPIKE以其轻量级和准确性成为学习RISC-V架构的理想工具。本文…...

Creality Print:从新手到专家的完整3D打印切片软件指南
Creality Print:从新手到专家的完整3D打印切片软件指南 【免费下载链接】CrealityPrint 项目地址: https://gitcode.com/gh_mirrors/cr/CrealityPrint 在3D打印的世界里,切片软件是连接数字模型与物理实体的关键桥梁。无论您刚刚接触3D打印&…...

math 7 [parallel lines] 2026.05.22
math 7 [parallel lines] 2026.05.22 平行线练习...

技术文档_车辆智能监测系统
车辆智能监测系统 - 技术文档 1. 系统概述 1.1 项目背景 本系统是一套基于海康威视SDK和RKNN模型的车辆智能监测系统,主要用于车辆年检场景中的黑烟检测和车牌识别。 1.2 核心功能功能模块说明状态车牌识别通过海康SDK接收车牌抓拍报警✅ 已实现黑烟检测使用RKNN模型…...
)
2026年主流AI论文写作软件全攻略(含保姆级操作教程)
以下是当前学术圈口碑TOP的6款AI写论文工具,覆盖从选题、开题到降重、答辩的论文全流程,剔除冗余工具,每款均附分步骤实操指南场景适配技巧,重点突出中文论文适配性,新手也能快速上手,效率翻倍。一、全流程…...

监区越界预警技术革命:基于纯视觉无感全域风控体系,重构智慧监所时空管控范式
监区越界预警技术革命:基于纯视觉无感全域风控体系,重构智慧监所时空管控范式当前国内智慧监所越界预警领域,传统管控方案高度依赖UWB超宽带单点定位技术,整体技术架构以硬件堆叠为核心,依托标签穿戴、单点锚定、局部电…...
)
保姆级教程:在Vue3项目中用ZLMediaKit+WebRTC实现超低延迟监控直播(附完整代码)
Vue3WebRTC超低延迟监控直播实战指南 在实时视频监控领域,延迟是衡量系统性能的核心指标之一。传统RTSP流媒体方案在Web端实现时,往往面临秒级甚至更长的延迟,这在对实时性要求极高的安防监控、工业检测等场景中成为致命短板。本文将深入探讨…...

CSerialPort 4.3.2 保姆级集成指南:5分钟让你的QT/MFC/Electron项目拥有稳定串口功能
CSerialPort 4.3.2 全栈集成实战:从QT到Electron的跨平台串口方案 在工业控制、物联网设备调试和嵌入式系统开发中,串口通信作为最基础也最可靠的数据传输方式之一,至今仍发挥着不可替代的作用。然而,不同操作系统提供的串口API差…...