18_FreeRTOS任务通知
目录
任务通知的简介
任务通知值的更新方式
任务通知的优势
任务通知的劣势
任务通知值和通知状态
发送通知相关API函数
接收通知相关API函数
任务通知模拟信号量实验
任务通知模拟消息邮箱实验
任务通知模拟事件标志组实验
任务通知的简介
任务通知:用来通知任务的,任务控制块中的结构体成员变量 ulNotifiedValue就是这个通知值。
使用队列、信号量、事件标志组时都需另外创建一个结构体,通过中间的结构体进行间接通信!

使用任务通知时,任务结构体TCB中就包含了内部对象,可以直接接收别人发过来的"通知"

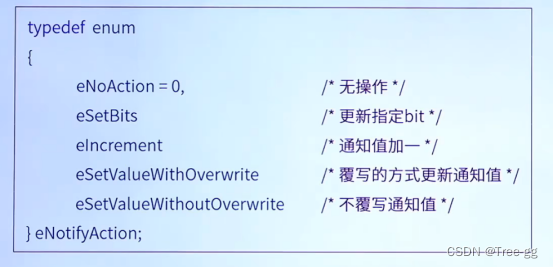
任务通知值的更新方式
不覆盖接受任务的通知值、覆盖接受任务的通知值、更新接受任务通知值的一个或多个bit、增加接受任务的通知值。
只要合理,灵活的利用任务通知的特点,可以在一些场合中替代队列、信号量、事件标志组!
任务通知的优势
效率更高:使用任务通知向任务发送事件或数据比使用队列、事件标志组或信号量快得多
使用内存更小:使用其他方法时都要先创建对应的结构体,使用任务通知时无需额外创建结构体
任务通知的劣势
无法发送数据给ISR:ISR没有任务结构体,所以无法给ISR发送数据。但是ISR可以使用任务通知的功能,发数据给任务。
无法广播给多个任务:任务通知只能是被指定的一个任务接收并处理
无法缓存多个数据:任务通知是通过更新任务通知值来发送数据的,任务结构休中只有一个任务通知值,只能保持一个数据。
发送受阻不支持阻塞:发送方无法进入阻塞状态等待
任务通知值和通知状态
任务都有一个结构体:任务控制块TCB,它里边有两个结构体成员变量:
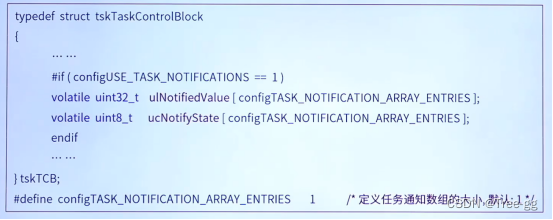
一个是 uint32_t类型,用来表示通知值
一个是 uint8_t 类型,用来表示通知状态
任务通知值
任务通知值的更新方式有多种类型:
计数值(数值累加,类似信号量)
相应位置一(类似事件标记组)
任意数值(支持覆写和不覆写,类似队列)
任务通知状态
其中任务通知状态共有3种取值:
#definetaskNOT_WAITING_NOTIFICATION ((uint8_t) 0) /* 任务未等待通知*/#definetaskWAITING_NOTIFICATION ((uint8_t) 1) /* 任务在等待通知*/#definetaskNOTIFICATION_RECEIVED ((uint8_t) 2) /* 任务在等待接收*/任务未等待通知:任务通知默认的初始化状态
等待通知:接收方已经准备好了(调用了接收任务通知函数) ,等待发送方给个通知
等待接收:发送方已经发送出去(调用了发送任务通知函数) ,等待接收方接收
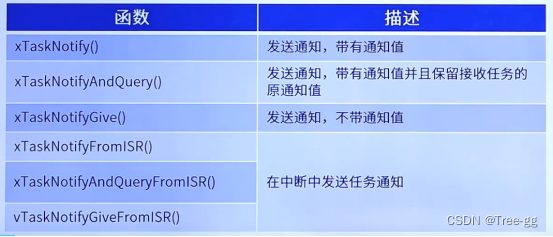
发送通知相关API函数
任务通知API函数主要有两类:发送通知,接收通知。
注意:发送通知API函数可以用于任务和中断服务函数中;接收通知API函数只能用在任务中。
发送通知,带有通知值并保留接收任务原通知值函数
#define xTaskNotifyAndQuery (xTaskToNotify, ulValue, eAction, pulPreviousNotifyValue) \xTaskGenericNotify( (xTaskToNotify),
(tskDEFAULT_INDEX_TO_NOTIFY),
(ulValue),
(eAction),
(pulPreviousNotifyValue))发送通知,带有通知值函数
#define xTaskNotify (xTaskToNotify, ulValue, eAction )xTaskGenericNotify( (xTaskToNotify),(tskDEFAULT_INDEX_TO_NOTIFY),(ulValue), (eAction),NULL)发送通知,不带通知值函数
#define xTaskNotifyGive( xTaskToNotify )xTaskGenericNotify( (xTaskToNotify),(tskDEFAULT_INDEX_TO_NOTIFY),(0), elncrement,NULL)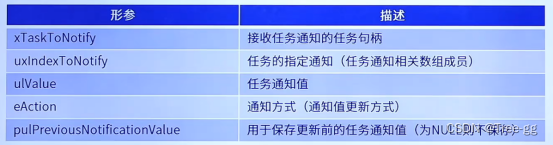
任务通知方式共有以下几种:
接收通知相关API函数
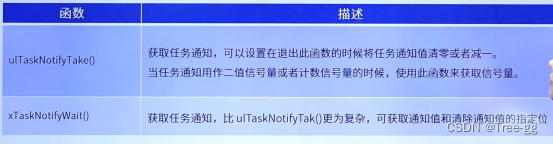
当任务通知用作于信号量时,使用函数获取信号量: ulTaskNotifyTake()
当任务通知用作于事件标志组或队列时,使用此函数来获取: xTaskNotifyWait()
此函数用于接收任务通知值,可以设置在退出此函数的时候将任务通知值清零或者减一
#define ulTaskNotifyTake( xClearCountOnExit ,xTicksToWait )ulTaskGenericNotifyTake ( (tskDEFAULT_INDEX_TO_NOTIFY),(xClearCountOnExit),(xTicksToWait))
此函数用于获取通知值和清除通知值的指定位值,适用于模拟队列和事件标志组,使用该函数来获取任务通知。
#define xTaskNotifyWait( ulBitsToClearOnEntry,ulBitsToClearOnExit,pulNotificationValue,xTicksToWait)xTaskGenericNotifyWait( tskDEFAULT_INDEX_TO_NOTIFY,(ulBitsToClearOnEntry),(ulBitsToClearOnExit),(pulNotificationValue),(xTicksToWait)
任务通知模拟信号量实验
任务通知功能模拟二值信号量和计数型信号量将设计三个任务: start_task、 task1、task2
start_task:用来创建task1和task2任务
task1:用于按键扫描,当检测到按键KEYO被按下时,将发送任务通知
task2:用于接收任务通知,并打印相关提示信息
/********************************************************************************* @file : user_mian.h* @brief : V1.00******************************************************************************* @attention********************************************************************************//* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "user_key.h"
#include "queue.h"
#include "event_groups.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*///任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define TASK1_PRIO 4
//任务堆栈大小
#define TASK1_STK_SIZE 100
//任务句柄
TaskHandle_t TASK1_Handler;
//任务函数
void task1(void *pvParameters);//任务优先级
#define TASK2_PRIO 3
//任务堆栈大小
#define TASK2_STK_SIZE 100
//任务句柄
TaskHandle_t TASK2_Handler;
//任务函数
void task2(void *pvParameters);int main(void){ /*配置系统中断分组为4位抢占*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);/*延时函数初始化*/delay_init();/*RCC配置*/Rcc_config();/*GPIO初始化*/ Gpio_Init();/*USART1初始化*/Uart1_Init(9600);/*创建开始任务*/xTaskCreate((TaskFunction_t )start_task, //任务函数(const char* )"start_task", //任务名称(uint16_t )START_STK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度}/*!\brief 开始任务函数\param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建高优先级任务xTaskCreate((TaskFunction_t )task1, (const char* )"task1", (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_PRIO, (TaskHandle_t* )&TASK1_Handler); //创建中优先级任务xTaskCreate((TaskFunction_t )task2, (const char* )"task2", (uint16_t )TASK2_STK_SIZE, (void* )NULL,(UBaseType_t )TASK2_PRIO,(TaskHandle_t* )&TASK2_Handler); vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}/*!\brief 任务1发送任务通知\param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void task1(void *pvParameters)
{uint8_t key = 0;while(1){ key = Key_Scan(0);if(key == KEY0_PRES){taskENTER_CRITICAL(); //进入临界区//printf("任务通知模拟二值信号量释放\r\n\r\n");printf("任务通知模拟计数型信号量释放\r\n\r\n");taskEXIT_CRITICAL(); //退出临界区/*发送任务通知给任务2信号量*/xTaskNotifyGive(TASK2_Handler);}vTaskDelay(10);}
} /*!\brief 任务2接收通知并打印 \param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void task2(void *pvParameters)
{uint32_t Value = 0;while(1){ /*接受信号量,pdTRUE接收成功后通知值清零(二值)pdFALSE(计数型),死等*/ Value = ulTaskNotifyTake(pdFALSE,portMAX_DELAY);if(Value != 0){
// taskENTER_CRITICAL(); //进入临界区
// printf("任务通知模拟二值信号量接受成功\r\n\r\n");
// taskEXIT_CRITICAL(); //退出临界区 taskENTER_CRITICAL(); //进入临界区printf("任务通知模拟计数信号量接受成功值为%d\r\n\r\n",Value);taskEXIT_CRITICAL(); //退出临界区 }vTaskDelay(1000);}
}/************************************************************** END OF FILE ****/
任务通知模拟消息邮箱实验
任务通知功能模拟模拟消息邮箱将设计三个任务: start_task、 task1、task2
start_task:用来创建task1和task2任务
task1:用于按键扫描,将按下的按键键值通过任务通知发送给指定任务
task2:用于接收任务通知,并根据接收到的数据做相应动作
/********************************************************************************* @file : user_mian.h* @brief : V1.00******************************************************************************* @attention********************************************************************************//* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "user_key.h"
#include "queue.h"
#include "event_groups.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*///任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define TASK1_PRIO 4
//任务堆栈大小
#define TASK1_STK_SIZE 100
//任务句柄
TaskHandle_t TASK1_Handler;
//任务函数
void task1(void *pvParameters);//任务优先级
#define TASK2_PRIO 3
//任务堆栈大小
#define TASK2_STK_SIZE 100
//任务句柄
TaskHandle_t TASK2_Handler;
//任务函数
void task2(void *pvParameters);int main(void){ /*配置系统中断分组为4位抢占*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);/*延时函数初始化*/delay_init();/*RCC配置*/Rcc_config();/*GPIO初始化*/ Gpio_Init();/*USART1初始化*/Uart1_Init(9600);/*创建开始任务*/xTaskCreate((TaskFunction_t )start_task, //任务函数(const char* )"start_task", //任务名称(uint16_t )START_STK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度}/*!\brief 开始任务函数\param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建高优先级任务xTaskCreate((TaskFunction_t )task1, (const char* )"task1", (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_PRIO, (TaskHandle_t* )&TASK1_Handler); //创建中优先级任务xTaskCreate((TaskFunction_t )task2, (const char* )"task2", (uint16_t )TASK2_STK_SIZE, (void* )NULL,(UBaseType_t )TASK2_PRIO,(TaskHandle_t* )&TASK2_Handler); vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}/*!\brief 任务1发送任务通知\param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void task1(void *pvParameters)
{uint8_t key = 0;while(1){ key = Key_Scan(0);if((key != 0) && (TASK2_Handler != NULL)){taskENTER_CRITICAL(); //进入临界区printf("任务通知模拟消息邮箱发送,发送的键值为:%d\r\n\r\n",key);taskEXIT_CRITICAL(); //退出临界区/*发送任务通知给任务2消息邮箱,按键值,覆写方式*/xTaskNotify(TASK2_Handler,key,eSetValueWithoutOverwrite);}vTaskDelay(10);}
} /*!\brief 任务2接收通知并打印 \param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void task2(void *pvParameters)
{uint32_t Value = 0;while(1) { /*接受任务通知,初始化时不清0,接受成功后全部清零,死等方式*/ xTaskNotifyWait(0,0xFFFFFFFF,&Value,portMAX_DELAY);if(Value != 0){taskENTER_CRITICAL(); //进入临界区printf("任务通知模拟消息邮箱接受成功值为%d\r\n\r\n",Value);taskEXIT_CRITICAL(); //退出临界区 }vTaskDelay(1000);}
}/************************************************************** END OF FILE ****/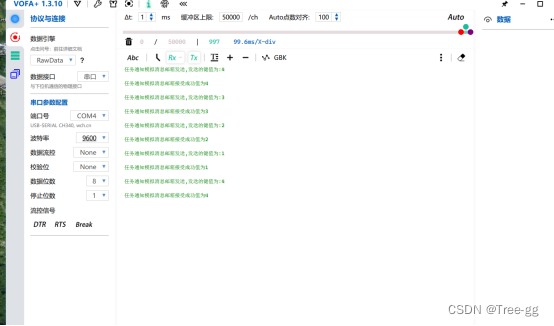
任务通知模拟事件标志组实验
任务通知功能模拟模拟事件标志组将设计三个任务: start_task、 task1、task2
start_task:用来创建task1和task2任务
task1:用于按键扫描,当检测到按键按下时,发送任务通知设置不同标志位
task2:用于接收任务通知,并打印相关提示信息
/********************************************************************************* @file : user_mian.h* @brief : V1.00******************************************************************************* @attention********************************************************************************//* Include 包含---------------------------------------------------------------*/
#include "stm32f10x.h"
#include <stdbool.h>
#include "user_gpio.h"
#include "user_delay.h"
#include "user_rcc_config.h"
#include "user_uart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
#include "user_key.h"
#include "queue.h"
#include "event_groups.h"
/* Typedef 类型----------------------------------------------------------------*/
/* Define 定义----------------------------------------------------------------*/
/* Macro 宏------------------------------------------------------------------*/
/* Variables 变量--------------------------------------------------------------*/
/* Constants 常量--------------------------------------------------------------*/
/* Function 函数--------------------------------------------------------------*///任务优先级
#define START_TASK_PRIO 1
//任务堆栈大小
#define START_STK_SIZE 128
//任务句柄
TaskHandle_t StartTask_Handler;
//任务函数
void start_task(void *pvParameters);//任务优先级
#define TASK1_PRIO 4
//任务堆栈大小
#define TASK1_STK_SIZE 100
//任务句柄
TaskHandle_t TASK1_Handler;
//任务函数
void task1(void *pvParameters);//任务优先级
#define TASK2_PRIO 3
//任务堆栈大小
#define TASK2_STK_SIZE 100
//任务句柄
TaskHandle_t TASK2_Handler;
//任务函数
void task2(void *pvParameters);int main(void){ /*配置系统中断分组为4位抢占*/NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);/*延时函数初始化*/delay_init();/*RCC配置*/Rcc_config();/*GPIO初始化*/ Gpio_Init();/*USART1初始化*/Uart1_Init(9600);/*创建开始任务*/xTaskCreate((TaskFunction_t )start_task, //任务函数(const char* )"start_task", //任务名称(uint16_t )START_STK_SIZE, //任务堆栈大小(void* )NULL, //传递给任务函数的参数(UBaseType_t )START_TASK_PRIO, //任务优先级(TaskHandle_t* )&StartTask_Handler); //任务句柄 vTaskStartScheduler(); //开启任务调度}/*!\brief 开始任务函数\param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void start_task(void *pvParameters)
{taskENTER_CRITICAL(); //进入临界区//创建高优先级任务xTaskCreate((TaskFunction_t )task1, (const char* )"task1", (uint16_t )TASK1_STK_SIZE, (void* )NULL, (UBaseType_t )TASK1_PRIO, (TaskHandle_t* )&TASK1_Handler); //创建中优先级任务xTaskCreate((TaskFunction_t )task2, (const char* )"task2", (uint16_t )TASK2_STK_SIZE, (void* )NULL,(UBaseType_t )TASK2_PRIO,(TaskHandle_t* )&TASK2_Handler); vTaskDelete(StartTask_Handler); //删除开始任务taskEXIT_CRITICAL(); //退出临界区
}/*!\brief 任务1发送任务通知\param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void task1(void *pvParameters)
{uint8_t key = 0;while(1){ key = Key_Scan(0);if(key == KEY0_PRES){taskENTER_CRITICAL(); //进入临界区printf("任务通知模拟事件更新bit0位\r\n\r\n");taskEXIT_CRITICAL(); //退出临界区/*发送任务通知给任务2事件标志组bit0置一*/xTaskNotify(TASK2_Handler,0x01,eSetBits);}else if(key == KEY1_PRES){taskENTER_CRITICAL(); //进入临界区printf("任务通知模拟事件更新bit1位\r\n\r\n");taskEXIT_CRITICAL(); //退出临界区/*发送任务通知给任务2事件标志组bit1置一*/xTaskNotify(TASK2_Handler,0x02,eSetBits);}vTaskDelay(10);}
} /*!\brief 任务2接收通知并打印 \param[in] 传递形参,创建任务时用户自己传入\param[out] none\retval none
*/
void task2(void *pvParameters)
{uint32_t Value = 0;uint32_t Event = 0;while(1) { /*接受任务通知,初始化时不清0,接受成功后全部清零,死等方式*/ xTaskNotifyWait(0,0xFFFFFFFF,&Value,portMAX_DELAY);if(Value & 0x01){Event |= 0x01;}if(Value & 0x02){Event |= 0x02;}if(Event == 0x03){Event = 0; taskENTER_CRITICAL(); //进入临界区printf("按键0和按键1按下打印提示语句\r\n\r\n");taskEXIT_CRITICAL(); //退出临界区 }vTaskDelay(1000);}
}/************************************************************** END OF FILE ****/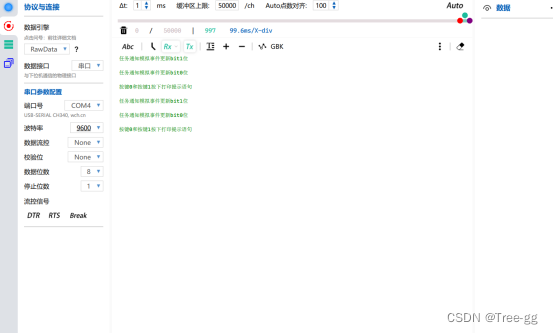
相关文章:
18_FreeRTOS任务通知
目录 任务通知的简介 任务通知值的更新方式 任务通知的优势 任务通知的劣势 任务通知值和通知状态 发送通知相关API函数 接收通知相关API函数 任务通知模拟信号量实验 任务通知模拟消息邮箱实验 任务通知模拟事件标志组实验 任务通知的简介 任务通知:用来通知任务的…...

【华为OD机试模拟题】用 C++ 实现 - 整理扑克牌(2023.Q1)
最近更新的博客 华为OD机试 - 入栈出栈(C++) | 附带编码思路 【2023】 华为OD机试 - 箱子之形摆放(C++) | 附带编码思路 【2023】 华为OD机试 - 简易内存池 2(C++) | 附带编码思路 【2023】 华为OD机试 - 第 N 个排列(C++) | 附带编码思路 【2023】 华为OD机试 - 考古…...
mysql lesson1
常用命令 1:exit 退出mysql 2:uroot pENTER键,再输入密码,不被别人看见 3:完美卸载:双击安装包,手动删除program file中的mysql,手动删除Programedate里的mysql 4:use mysql 使用数据库 5:…...
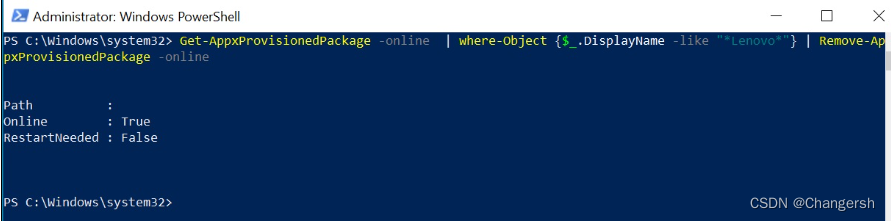
联想笔记本无法下载 Lenovo Vantage
状况 在 Microsoft Store 下载时发生错误,可能是如下代码:0x80070005, 0x80073D05, or 0x80070017. 解决方法 1.在“开始”菜单搜索栏中输入PowerShell 2.当Windows PowerShell出现在“开始”菜单中,右键点击此图标,然后选择以…...

功能性材料深入超级赛道,赋能多行业迭代升级
中国国际胶粘剂及密封剂展览会深耕胶粘剂、密封剂和胶粘带行业26年,是行业认可的、优质的贸易与技术交流平台。展会连接了十几个行业的买家和卖家,包括汽车、电子、新能源、轨道交通、工业等重要领域,为客户提供封装、粘合、散热、装配制造等…...
【项目精选】jsp企业快信系统(论文+视频+源码)
点击下载源码 计算机网络的出现到现在已经经历了翻天覆地的重大改变。因特网也从最早的供科学家交流心得的简单的文本浏览器发展成为了商务和信息的中心。到了今天,互联网已经成为了大量应用的首选平台,人们已经渐渐习惯了网络交易,渐渐对网络…...

通信算法之112:载波同步及comm.CarrierSynchronizer
1. 2. 载波同步是基于锁相环技术使本地获取和载波同频同相的参考信号,用来解调信号。载波同步就是对本地参考信号进行频率和相位偏差的补偿,进而实现本地参考信号和载波信号同频同相。 载波同步只适用于单载波调制系统,载波同步算法对于BPSK、…...
)
【C. Build Permutation】(整数理论、构造、思维)
链接 理论基础 结论:在区间[n,2n]上,至少存在一个完全平方数。结论:在区间[n,2n]上,至少存在一个完全平方数。结论:在区间[n,2n]上,至少存在一个完全平方数。 构造⌈n⌉2构造\lceil \sqrt{n}\rceil^2构造⌈…...
)
前端面试题:事件循环(Eventloop)
什么是事件循环?如何理解事件循环?事件循环原理如何描述?事件循环涉及了很多知识点,想要彻底掌握JS事件循环原理必须要掌握以下知识点:同步任务、异步任务、宏任务、微任务、任务队列、执行栈、js运行机制、EventLoop。 1.事件循…...

jmeter接口自动化测试框架
接口测试可以分为两部分: 一是线上接口(生产环境)自动化测试,需要自动定时执行,每5分钟自动执行一次,相当于每5分钟就检查一遍线上的接口是否正常,有异常能够及时发现,不至于影响用…...
树莓派CM4基础设置
安装系统1.1 软件和硬件准备硬件:CM4(4GB DDR32GB EMMC 板载WIFI和蓝牙)CM4-to-Pi4-Adapter软件:Raspberry Pi或者 Win32DiskImagerRaspberry Pi下载链接:点击直接下载Win32DiskImager下载链接:链接&#x…...

JS 合并数组的三大方式
1. 数组的不可变合并 1.1使用扩展运算符进行合并 如果您想知道一种在JavaScript中合并数组的好方法,那么请记住使用扩展操作符进行合并。 在数组字面量中写入两个或更多带有扩展操作符…前缀的数组,JavaScript将创建一个合并所有这些数组的新数组: co…...
30岁测试开发年薪不足50万,被面试官嘲讽混得太差?
近日,有网友发帖称:“30岁去应聘测试开发,拿不到七八十万的年薪确实有点丢人了,还被面试官diss混得太差了”,网友们看完都炸了。 来看看网友们都是怎么说的。 有网友说: 扯淡 有网友气到: 那拿…...

【C语言】多线程
多线程线程线程的优点C语言多线程创建线程终止线程连接和分离线程开启一个线程最基本的多线程实现开启两个线程多线程进行协同运算无参数传递的线程并发编程实例简单参数传递的线程并发编程实例结构体参数传递的线程并发编程实例线程的连接编程实例信号量同步进行写入互斥信号量…...

CDGA|浅谈“以治促用,以用促治”的数据治理战略
数据治理夯实企业数字化转型基础。采取“以治促用,以用促治”的数据治理战略,可以充分释放了企业核心运行要素的活力。 “以治促用”是指通过建立在数据治理链路及用户多维评估系统的基础上,对数据资产重新进行价值识别,推进高价值…...
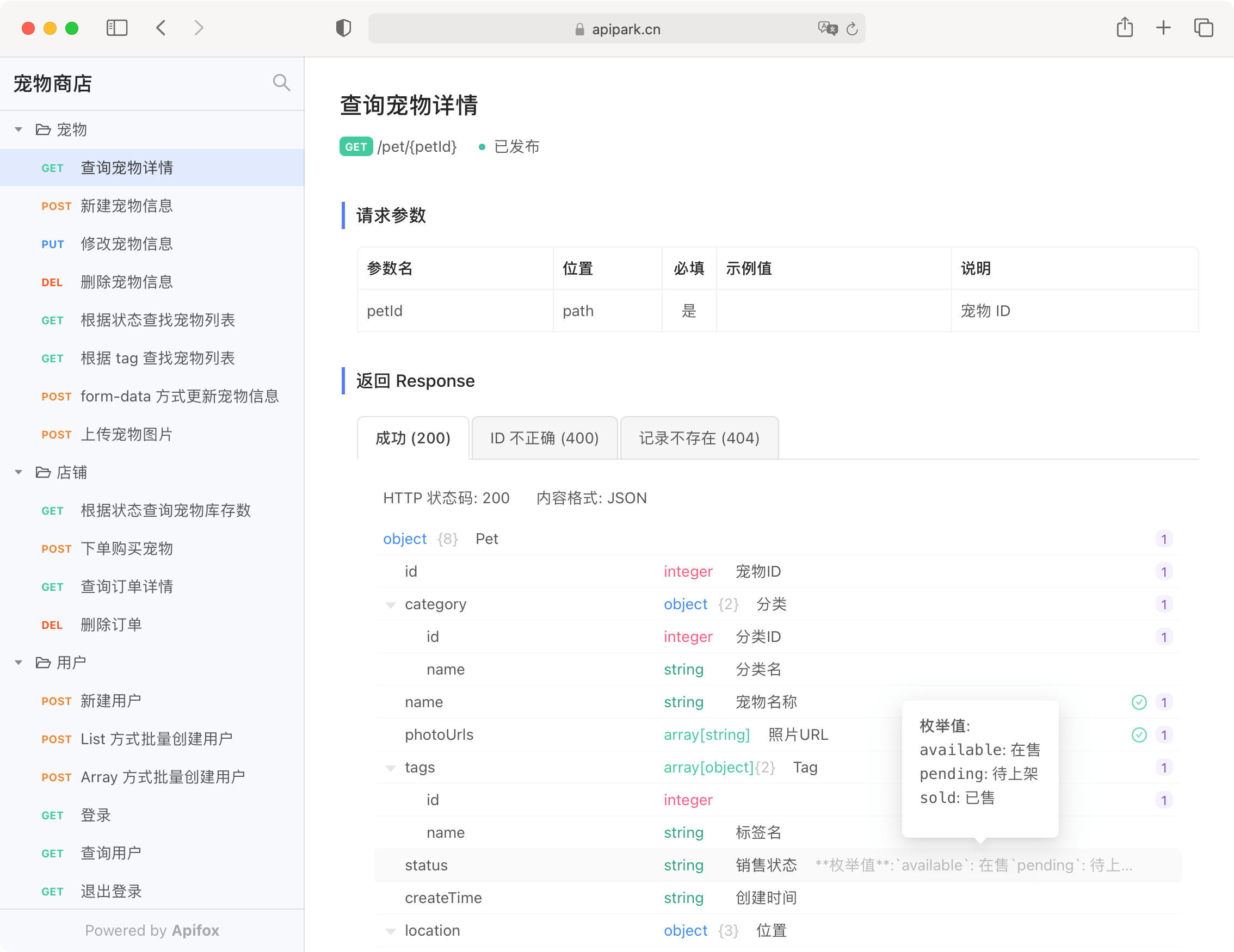
Apifox-比postman更优秀的接口自动化测试平台
一、Apifox介绍 Apifox 是 API 文档、API 调试、API Mock、API 自动化测试一体化协作平台,定位 Postman Swagger Mock JMeter。通过一套系统、一份数据,解决多个系统之间的数据同步问题。只要定义好 API 文档,API 调试、API 数据 Mock、A…...
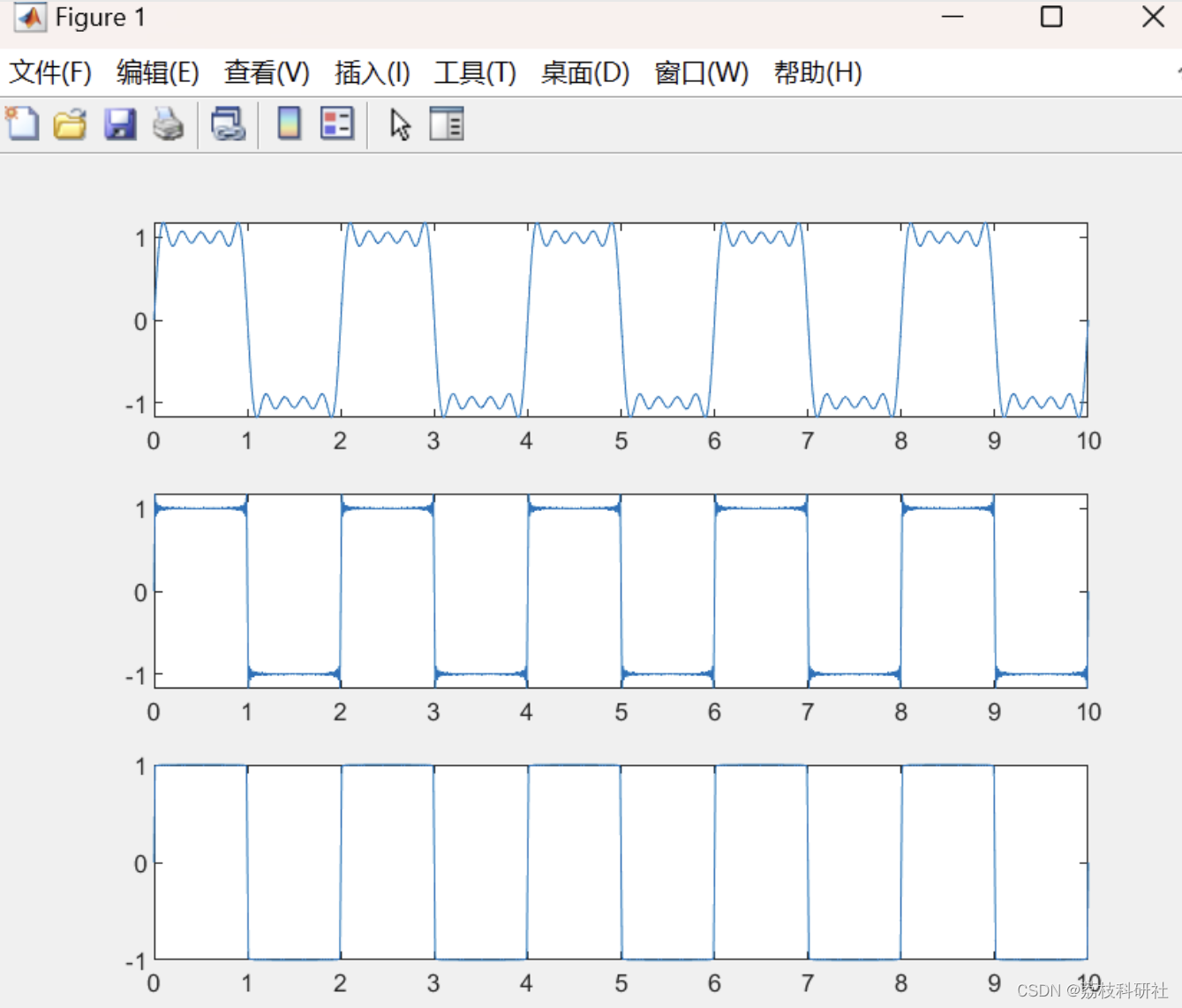
周期矩形波的傅里叶级数展开(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

前端预防XSS攻击全攻略
如何防止XSS攻击 一、是撒子 XSS攻击(跨站点脚本攻击),就是黑客恶意篡改你网页的前端代码,在里面注入一些恶意的 htmljavascript的脚本,并在你的浏览器内运行,获取你的信息,或者进行一些恶意操…...
)
JUC(一)
1.AQS原理 1.1.概述 1>.AQS全称是 AbstractQueuedSynchronizer,是阻塞式锁和相关的同步器工具的框架; 2>.特点: ①.用state属性来表示资源的状态(分独占模式和共享模式),子类需要定义如何维护这个状态,控制如何获取锁和释放锁; getState: 获取state状态;setStata: 设置…...

API接口——睡眠带开放能力
本文介绍睡眠带相关接口。 API 列表 请求方法API描述GET/v1.0/devices/{device_id}/sleep/daily-reports获取日睡眠报告。GET/v1.0/devices/{device_id}/sleep/monthly-reports获取月睡眠报告。GET/v1.0/devices/{device_id}/sleep/24h-reports获取 24 小时睡眠报告。GET/v1.…...

Arduino ADC自检:用RC电路诊断模数转换器故障
1. 项目概述:当你的体重秤开始“说谎”你有没有遇到过这样的情况:站上家里的电子体重秤,屏幕上跳出来的数字让你瞬间怀疑人生?要么是轻得离谱,要么是重得吓人,更诡异的是,它可能只在两个固定的、…...

Lovable电商网站搭建:如何用不到3人技术团队,72小时内上线PCI-DSS合规MVP版本?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署能力。本章将指导你从零开始搭建一个具备商品展示、…...

利用Taotoken多模型聚合能力为AIGC应用提供备选方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken多模型聚合能力为AIGC应用提供备选方案 在构建AIGC内容生成应用时,开发者通常会选择一个主流模型作为服务…...

FM广播高精度预加重模块设计:解决传统电路缺陷,提升音质与信噪比
1. 项目概述:为什么FM广播需要高精度预加重?如果你玩过FM广播发射,或者对音频处理链路有点研究,大概率听说过“预加重”这个词。简单说,它就是在发射端人为提升高频信号电平的一个处理环节。欧洲标准是50微秒ÿ…...

UE5 UMG界面开发避坑指南:WidgetComponent的ZOrder和图层管理到底怎么用?
UE5 UMG界面开发避坑指南:WidgetComponent的ZOrder和图层管理实战解析在虚幻引擎5的UMG界面开发中,WidgetComponent的渲染层级管理是一个看似简单却暗藏玄机的技术点。许多开发者在处理复杂UI系统时,常常会遇到控件遮挡混乱、图层顺序失控的问…...

机器学习赋能分子模拟:从数据驱动CV到自适应采样破解采样瓶颈
1. 项目概述与核心价值在分子模拟的世界里,我们常常面临一个根本性的困境:我们想理解一个复杂系统(比如一个蛋白质如何折叠,或者一个催化剂表面如何发生反应)的微观机理,但系统的相空间维度高得吓人——动辄…...

Beyond Compare 5密钥生成终极指南:从RSA原理到实战激活
Beyond Compare 5密钥生成终极指南:从RSA原理到实战激活 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen Beyond Compare 5是一款功能强大的文件对比工具,但30天评估期后的…...

3步快速上手:AMD Ryzen性能调试工具SMUDebugTool完全指南
3步快速上手:AMD Ryzen性能调试工具SMUDebugTool完全指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https:/…...

UI-TARS Desktop 深度解析:字节跳动 34K Star 的多模态 AI Agent 栈
🖥️ UI-TARS Desktop 深度解析:字节跳动 34K Star 的多模态 AI Agent 栈 字节跳动 Bytedance 出品 | 34.3K GitHub Stars | Apache 2.0 | 超越 Claude Computer Use 🔥 前言:当 AI 学会操作电脑 2025 年 1 月,字节跳…...
)
告别Visual Studio:在Mac上用VSCode打造高效Unity工作流(插件、终端、工具链整合)
告别Visual Studio:在Mac上用VSCode打造高效Unity工作流(插件、终端、工具链整合) 当Unity开发者从Windows转向Mac平台时,往往会面临开发工具链的重构。Visual Studio在Mac上的体验远不如Windows版本流畅,而VSCode凭借…...