矩阵的相似性度量的常用方法
矩阵的相似性度量的常用方法
1,欧氏距离
欧式距离是最易于理解的一种距离计算方法,源自欧式空间中两点间的距离公式。
(1)二维平面上的点 a ( x 1 , y 1 ) a(x_1,y_1) a(x1,y1)和点 b ( x 2 , y 2 ) b(x_2,y_2) b(x2,y2)的欧式距离为
d = ( x 1 − x 2 ) 2 + ( y 1 − y 2 ) 2 d=\sqrt{(x_1-x_2)^2+(y_1-y_2)^2} d=(x1−x2)2+(y1−y2)2
(2)三维平面上的点 a ( x 1 , y 1 , z 1 ) a(x_1,y_1,z_1) a(x1,y1,z1)和点 b ( x 2 , y 2 , z − 2 ) b(x_2,y_2,z-2) b(x2,y2,z−2)的欧式距离为
d = ( x 1 − x 2 ) 2 + ( y 1 − y 2 ) 2 + ( z 1 − z 2 ) 2 d=\sqrt{(x_1-x_2)^2+(y_1-y_2)^2+(z_1-z_2)^2} d=(x1−x2)2+(y1−y2)2+(z1−z2)2
不失一般性:
D ( X i , X j ) = ∑ l = 1 d ( x i l − x j l ) 2 D(X_i,X_j)=\sqrt{\sum_{l=1}^d(x_{il}-x_{jl})^2} D(Xi,Xj)=∑l=1d(xil−xjl)2
其中:D表示样本间的距离, X i , X j X_i,X_j Xi,Xj代表一个向量,或称为样本点或者样本;l是样本特征的维数, x i l , x j l x_{il},x_{jl} xil,xjl表示一个变量,或成为属性;d表示样本的总维数,即样本特征的总数量(下同)。
2,切比雪夫距离
在二维空间中,切比雪夫距离的典型应用是解决国际象棋中的国王从一个格子走到另一个格子最少需要几步的问题。这种距离在模糊C-Means方法中得到了有效应用。切比雪夫距离的公式可以表示为:
D ( X i , X j ) = m a x l ( ∣ x i l − x j l ∣ ) D(X_i,X_j)=max_l(|x_{il}-x_{jl}|) D(Xi,Xj)=maxl(∣xil−xjl∣)
此公式的另一种表示形式为:
D ( X i , X j ) = lim p → + ∞ ∑ l = 1 d ( x i l − x j l ) 2 p D(X_i,X_j)=\lim_{p\rightarrow+\infty}\sqrt[p]{\sum_{l=1}^d(x_{il}-x_{jl})^2} D(Xi,Xj)=limp→+∞p∑l=1d(xil−xjl)2
3,曼哈顿距离
在城市生活中,只能沿着街道从一个地方走到另一个地方,为此,人们将生活中熟悉的城市街区距离形象地称为曼哈顿距离。该距离的表示公式为:
D ( X i , X j ) = ∑ l = 1 d ( ∣ x i l − x j l ∣ ) D(X_i,X_j)=\sum_{l=1}^d(|x_{il}-x_{jl}|) D(Xi,Xj)=∑l=1d(∣xil−xjl∣)
曼哈顿距离在基于自适应谐振理论的同步聚类中有较好的应用;但是需要注意的是这种距离不再符合在特征空间中的转化和旋转的不变性。
4,闵可夫斯基距离
闵可夫斯基距离是一种p范数的形式,公式可以表示为:
D ( X i , X j ) = ∑ l = 1 d ( x i l − x j l ) 2 p D(X_i,X_j)=\sqrt[p]{\sum_{l=1}^d(x_{il}-x_{jl})^2} D(Xi,Xj)=p∑l=1d(xil−xjl)2
从式中可以看出,若p为无穷大时,这种距离可以称为切比雪夫距离;若p=2时就是欧几里得距离;那么当p=1时就是曼哈顿距离。
5,马氏距离
马氏距离是一种关于协方差矩阵的距离度量表示方法,其公式为:
D ( X i , X j ) = ( X i − X j ) T S − 1 ( X i − X j ) D(X_i,X_j)=\sqrt{(X_i-X_j)^TS^{-1}(X_i-X_j)} D(Xi,Xj)=(Xi−Xj)TS−1(Xi−Xj)
其中T表示转置,S为样本协方差矩阵。马氏距离的优点是距离与属性的量纲无关,并排除了属性之间的相关性干扰,若各个属性之间独立同分布,则协方差矩阵为单位矩阵。这样,平方马氏距离也就转化成了欧氏距离。
6,对称点距离
当聚类存在对称模式时,就可以使用对称点距离。其距离公式为:
D ( X i , X r ) = m a x j = 1 , 2 , … , N , j ≠ i ∣ ∣ ( X i − X r ) + ( X j − X r ) ∣ ∣ ∣ ∣ ( X i − X r ) ∣ ∣ + ∣ ∣ ( X j − X r ) ∣ ∣ D(X_i,X_r)=max_{j=1,2,…,N,j≠i}\frac{||(X_i-X_r)+(X_j-X_r)||}{||(X_i-X_r)||+||(X_j-X_r)||} D(Xi,Xr)=maxj=1,2,…,N,j=i∣∣(Xi−Xr)∣∣+∣∣(Xj−Xr)∣∣∣∣(Xi−Xr)+(Xj−Xr)∣∣
对称点距离就是该点到对称点和其他点距离的最小值。
7,相关系数
距离度量也可以源于相关系数,如皮尔逊相关系数的定义为:
ρ x i x j = C o v ( X i , X j ) D ( X i ) D ( X j ) ρ_{x_ix_j}=\frac{Cov(X_i,X_j)}{\sqrt{D(X_i)}\sqrt{D(X_j)}} ρxixj=D(Xi)D(Xj)Cov(Xi,Xj)
8,余弦相似度
最后一种直接计算相似性的方法是余弦相似度。其表示形式为:
S ( X i , X j ) = c o s α = X i T X j ∣ ∣ X i ∣ ∣ ∣ ∣ X j ∣ ∣ S(X_i,X_j)=cosα=\frac{X_i^TX_j}{||X_i||\ ||X_j||} S(Xi,Xj)=cosα=∣∣Xi∣∣ ∣∣Xj∣∣XiTXj
这里,S表示样本之间的相似性(以下同)。在特征空间中,两个样本越相似,则他们越趋向于平行,那么他们的余弦值也就越大。
(附:为什么大模型每个层之间要加入Layer Normalization?原因就是因为神经网络的基本计算就是点积相似度计算,而点积相似度的取值范围是没有约束的,这导致神经网络结构很难学习,因为variance太大了。所以引入Layer Normalization之后,可以让点积相似度变成了余弦相似度。当然中间有一个系数就是根号的输入向量的维度,这也就是为什么transformer架构中为什么要除以根号的输入向量的维度的原因,因为除以根号的输入向量的维度之后,Norm之后的向量,神经元的点积相似度就等于余弦相似度了。所以,让没有取值范围约束的点积相似度有了约束,【-1,1】,从而可以让神经网络稳定的训练。)
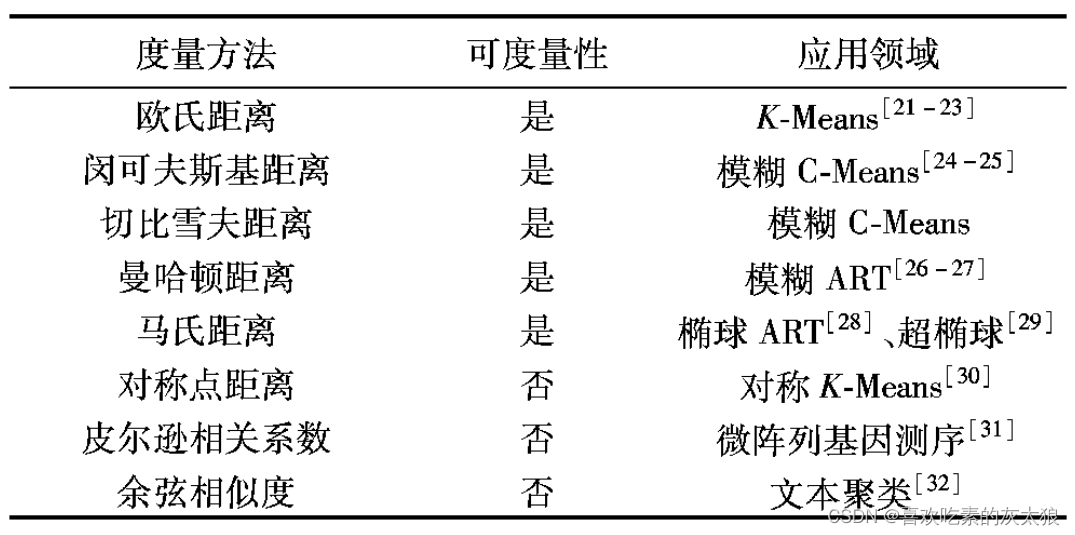
需要注意的是最后三类相似度计算方法不再符合对称性,非负性与反身性的要求,即属于非可度量的范畴。连续性变量的相似性度量方法在不同聚类算法中的应用如下图所示。
相关文章:
矩阵的相似性度量的常用方法
矩阵的相似性度量的常用方法 1,欧氏距离 欧式距离是最易于理解的一种距离计算方法,源自欧式空间中两点间的距离公式。 (1)二维平面上的点 a ( x 1 , y 1 ) a(x_1,y_1) a(x1,y1)和点 b ( x 2 , y 2 ) b(x_2,y_2) b(x2,y2)的欧式距离为 d ( x …...

Java之TCP,UDP综合小练习一
4. 综合练习 练习一:多发多收 需求: 客户端:多次发送数据 服务器:接收多次接收数据,并打印 代码示例: public class Client {public static void main(String[] args) throws IOException {//客户端&…...
Docker 日志管理 - ELK
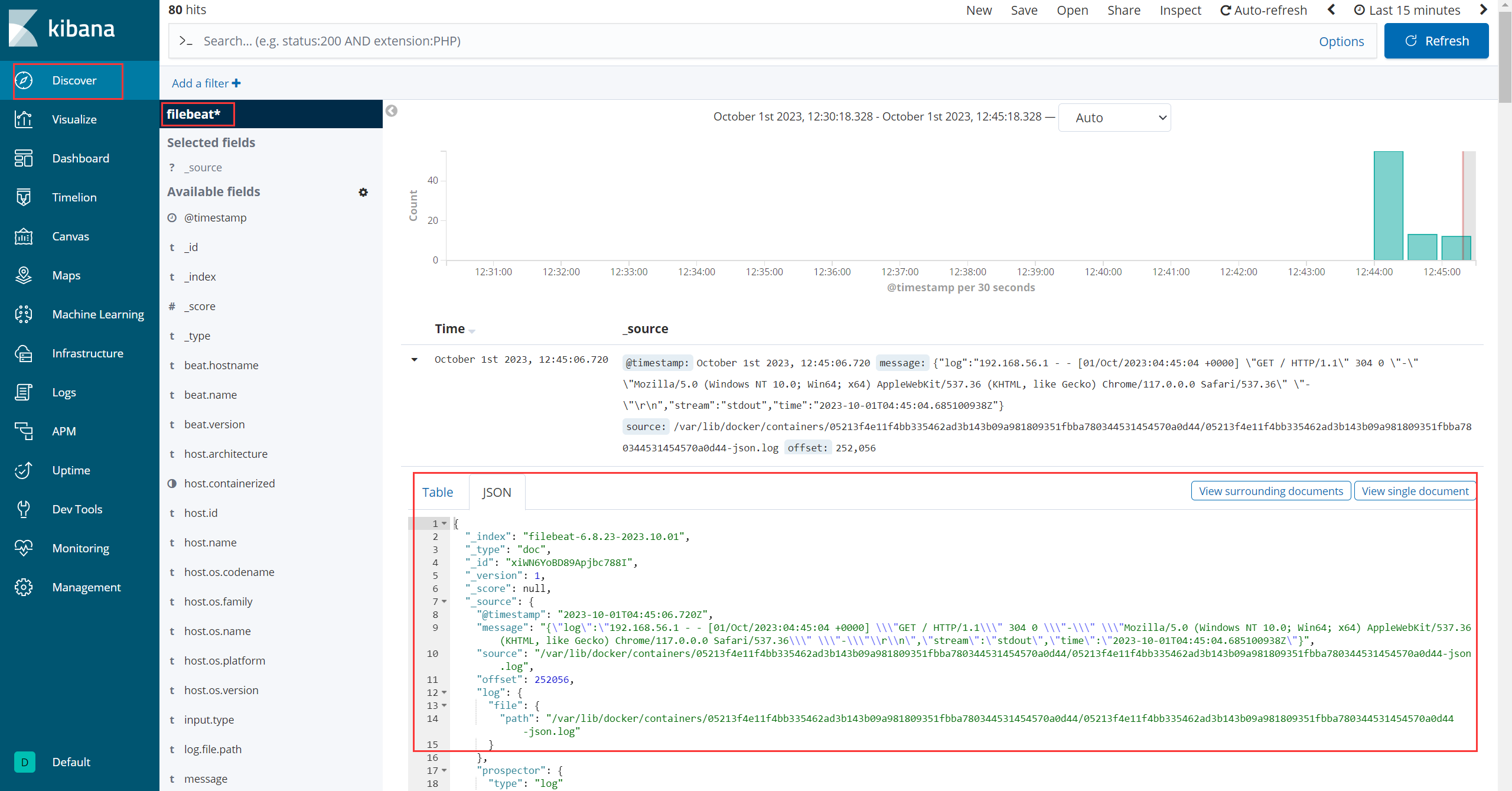
Author:rab 目录 前言一、Docker 日志驱动二、ELK 套件部署三、Docker 容器日志采集3.1 部署 Filebeat3.2 配置 Filebeat3.3 验证采集数据3.4 Kibana 数据展示3.4.1 创建索引模式3.4.2 Kibana 查看日志 总结 前言 如何查看/管理 Docker 运行容器的日志?…...
windows系统下利用python对指定文件夹下面的所有文件的创建时间进行修改
windows系统下利用python对指定文件夹下面的所有文件的创建时间进行修改 不知道其他的朋友们有没有这个需求哈,反正咱家是有这个需求 需求1、当前有大量的文件需要更改文件生成的时间,因为不可告知的原因,当前的文件创建时间是不能满足使用的…...

线性表的链式表示——单链表;头插,尾插,按值查找,按序号查找,插入,删除;
#include <iostream> #include <algorithm>//fill() #define InitSize 5using namespace std;/*线性表:链式表示——单链表;头插,尾插,按值查找,按序号查找,插入,删除*/ typedef st…...

【Spring Cloud系统】- Zookeer特性与使用场景
【Spring Cloud系统】- Zookeer特性与使用场景 一、概述 Zookeeper是一个分布式服务框架,是Apache Hadoop的一个子项目,它主要是用来解决分布式应用中经常遇到的一些数据管理问题。如:统一命名服务、状态同步服务、集群管理、分布式应用配置…...

最新AI智能创作系统源码SparkAi系统V2.6.3/AI绘画系统/支持GPT联网提问/支持Prompt应用/支持国内AI模型
一、智能AI创作系统 SparkAi创作系统是基于OpenAI很火的ChatGPT进行开发的Ai智能问答系统,已支持OpenAIGPT全模型国内AI全模型,已支持国内AI模型 百度文心一言、微软Azure、阿里云通义千问模型、清华智谱AIChatGLM、科大讯飞星火大模型等。本期针对源码…...
R | R包默认安装路径的查看及修改
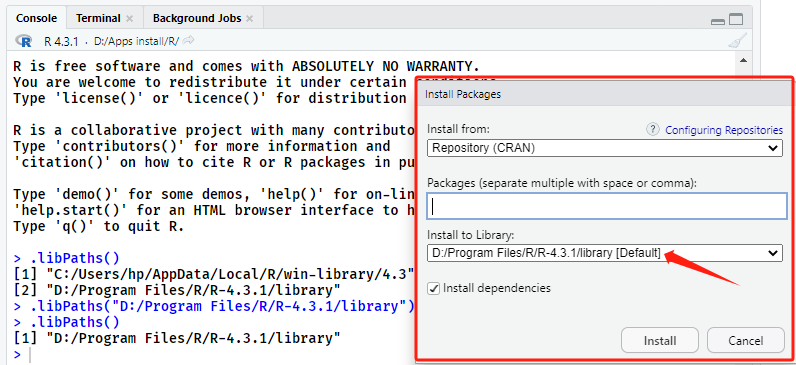
R | R包默认安装路径的查看及修改 一、R包安装位置查看二、已安装R包查询三、R包安装位置修改四、R包安装位置永久修改 在【R: R package安装的几种方式】【R: R版本更新及R包迁移(详细步骤)】两篇文章中介绍过R包的常见安装方式,以及在不同R…...

将conda虚拟环境打包并集成到singularity镜像中
1. 使用yml文件打包 conda activate your_env conda env export > environment.yml编写cond.def文件 Bootstrap: dockerFrom: continuumio/miniconda3%filesenvironment.yml%post/opt/conda/bin/conda env create -f environment.yml%runscriptexec /opt/conda/envs/$(hea…...

Android Studio 是如何和我们的手机共享剪贴板的
背景 近期完成了target33的项目适配升级,随着AGP和gradle的版本升级,万年老版本Android Studio(后文简称AS)也顺便升级到了最新版Android Studio Giraffe | 2022.3.1,除了新UI外,最让我好奇的是这次的Running Devices功能(官方也称为Device mirroring)可以控制真机了. 按照操…...

大数据面试题:Spark和MapReduce之间的区别?各自优缺点?
面试题来源: 《大数据面试题 V4.0》 大数据面试题V3.0,523道题,679页,46w字 可回答: 1)spark和maprecude的对比;2)mapreduce与spark优劣好处 问过的一些公司:阿里云…...

【开发篇】十八、SpringBoot整合ActiveMQ
文章目录 1、安装ActiveMQ2、整合3、发送消息到队列4、使用消息监听器对消息队列监听5、流程性业务消息消费完转入下一个消息队列6、发布订阅模型 1、安装ActiveMQ docker安装 docker pull webcenter/activemqdocker run -d --name activemq -p 61616:61616 -p 8161:8161 webce…...

QTcpSocket 接收数据实时性问题
一、开发背景 使用 Qt 的 QTcpSocket 接收数据的时候发现数据接收出现粘包的现象,并且实时性很差,通过日志的时间戳发现数据接收的误差在 100ms 以内。 二、开发环境 Qt5.12.2 QtCreator4.8.2 三、实现步骤 在 socket 连接的槽函数设置接收延时时间&…...

前端el-select 单选和多选
el-select单选 <el-form-item label"部门名称" prop"departId"><el-select v-model"dataForm.departId" placeholder"请选择" clearable:style{ "width": "100%" } :multiple"false" filtera…...
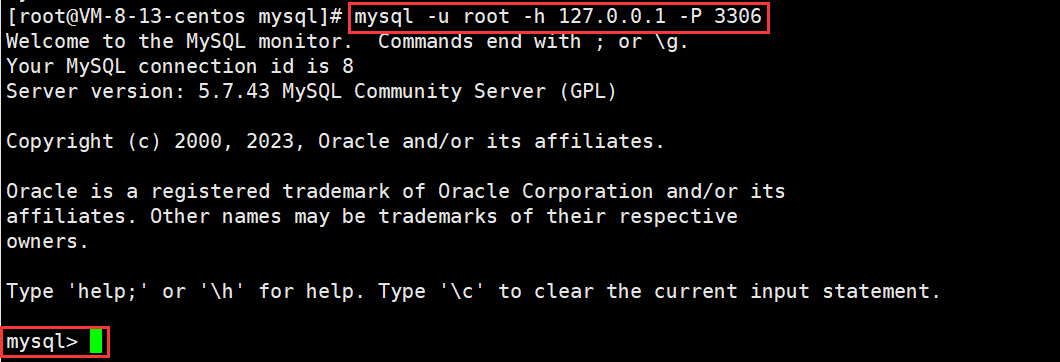
【MySQL】Linux 中 MySQL 环境的安装与卸载
文章目录 Linux 中 MySQL 环境的卸载Linux 中 MySQL 环境的安装 Linux 中 MySQL 环境的卸载 在安装 MySQL 前,我们需要先将系统中以前的环境给卸载掉。 1、查看以前系统中安装的 MySQL rpm -qa | grep mysql2、卸载这些 MySQL rpm -qa | grep mysql | args yum …...
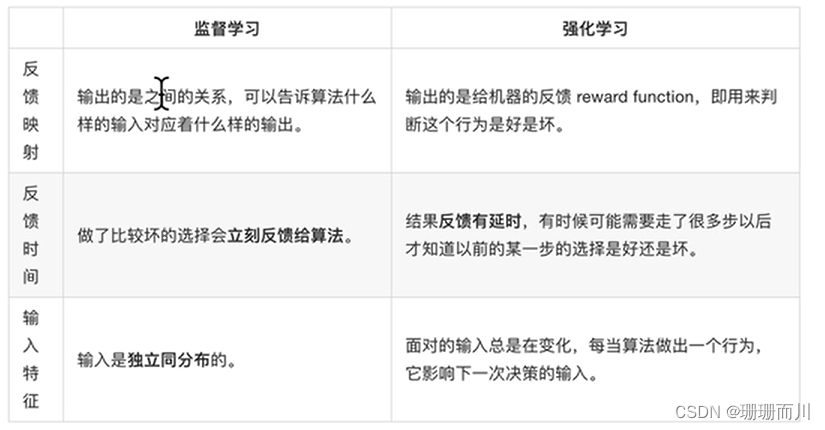
机器学习算法分类
学习视频黑马程序员 监督学习 无监督学习 半监督学习 强化学习...
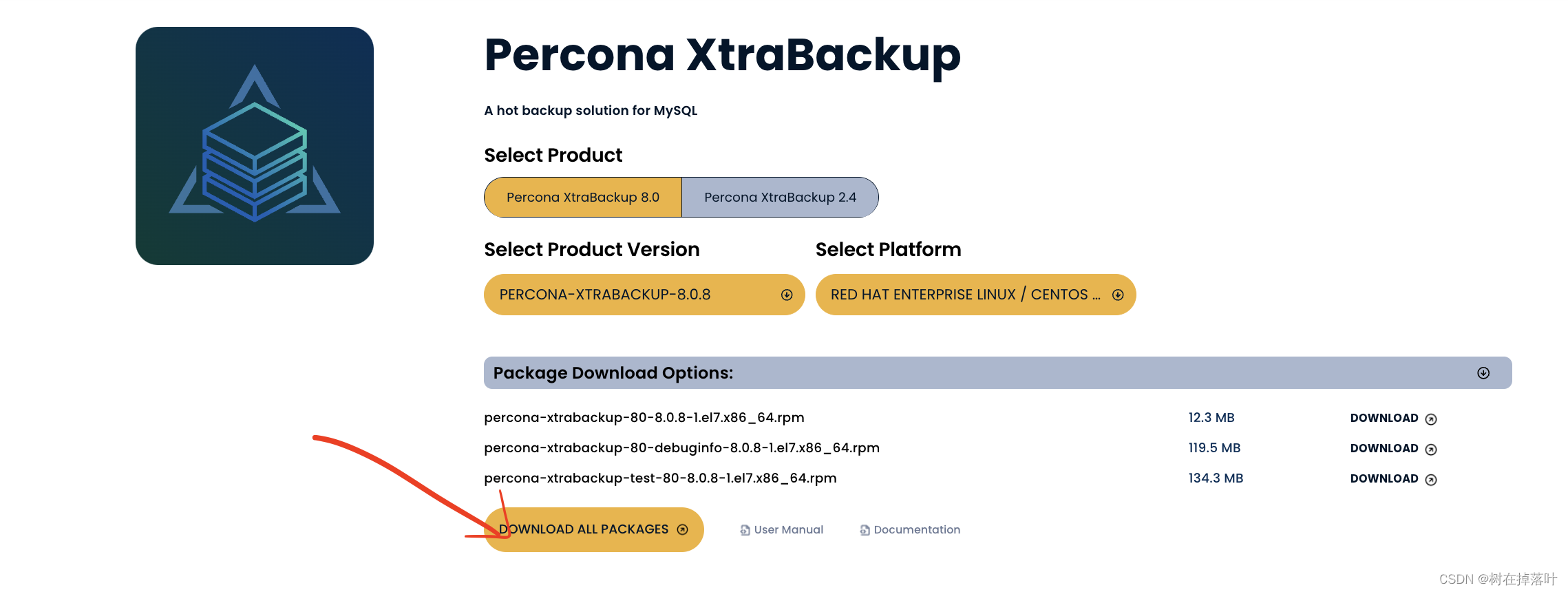
Mysql bin-log日志恢复数据与物理备份-xtrabackup
主打一个数据备份与恢复 binlog与xtarbackup bin-log日志恢复开启bin-log配置bin-log日志恢复 物理备份-xtrabackup三种备份方式安装xtrabackup备份全量备份增量备份差异备份 bin-log日志恢复 bin-log 日志,就记录对数据库进行的操作,什么增删改的操作全…...
JAVA 学习笔记 2年经验
文章目录 基础String、StringBuffer、StringBuilder的区别jvm堆和栈的区别垃圾回收标记阶段清除阶段 异常类型双亲委派机制hashmap和hashtable concurrentHashMap 1.7和1.8的区别java的数据结构排序算法,查找算法堆排序 ThreadLocal单例模式常量池synchronizedsynch…...
网络安全--安全认证、IPSEC技术
目录 1. 什么是数据认证,有什么作用,有哪些实现的技术手段? 2. 什么是身份认证,有什么作用,有哪些实现的技术手段? 3. 什么是VPN技术? 4. VPN技术有哪些分类? 5. IPSEC技术能够…...

Mysql——创建数据库,对表的创建及字段定义、数据录入、字段增加及删除、重命名表。
一.创建数据库 create database db_classics default charsetutf8mb4;//创建数据库 use db_classics;//使用该数据库二.对表的创建及字段定义 create table if not exists t_hero ( id int primary key auto_increment, Name varchar(100) not null unique, Nickname varchar(1…...
【玩转PB级数仓GaussDB(DWS)】)
windows系统下操作GaussDB(DWS)【玩转PB级数仓GaussDB(DWS)】
数据仓库服务GaussDB(DWS) 是一种基于华为云基础架构和平台的在线数据处理数据库,提供即开即用、可扩展且完全托管的分析型数据库服务。GaussDB(DWS)是基于华为融合数据仓库GaussDB产品的云原生服务 ,兼容标准ANSI SQL 99和SQL 2003,同时兼容…...
)
Midjourney提示词工程终极护城河:基于CLIP文本嵌入空间的向量对齐技术(附Python可视化调试工具)
更多请点击: https://intelliparadigm.com 第一章:Midjourney提示词工程终极护城河:基于CLIP文本嵌入空间的向量对齐技术(附Python可视化调试工具) 在生成式AI实践中,提示词质量差异常导致图像语义漂移——…...

TCRT5000循迹小车总跑偏?一份给STM32新手的硬件调试与软件滤波避坑指南
TCRT5000循迹小车调试实战:从硬件校准到软件滤波的完整解决方案 当你的STM32循迹小车在赛道上左右摇摆、频繁跑偏时,问题往往不只是代码逻辑那么简单。作为嵌入式开发新手,你可能已经尝试过调整PID参数、修改转向算法,但效果依然不…...

终极PT资源管理指南:如何用auto_feed_js实现100+站点一键转载
终极PT资源管理指南:如何用auto_feed_js实现100站点一键转载 【免费下载链接】auto_feed_js PT站一键转载脚本 项目地址: https://gitcode.com/gh_mirrors/au/auto_feed_js 在PT(Private Tracker)社区中,资源分享是核心价值…...
别再傻等下载了!手把手教你用wget离线搞定sentence_transformers模型(以all-MiniLM-L6-v2为例)
高效离线部署sentence_transformers模型:wget实战指南 1. 为什么需要离线下载方案 在自然语言处理领域,预训练模型已成为各类文本理解任务的基础设施。然而,当我们需要在生产环境或受限网络条件下部署这些模型时,直接通过Python库…...

Degrees of Lewdity中文本地化完全指南:解决游戏语言障碍的3个实用技巧
Degrees of Lewdity中文本地化完全指南:解决游戏语言障碍的3个实用技巧 你是否因Degrees of Lewdity英文界面而无法深入体验游戏?是否曾因汉化步骤繁琐而放弃尝试?本指南将通过模块化解决方案,帮助你快速完成游戏汉化,…...

AI代码库分析:用大模型自动生成项目教程与架构图
1. 项目概述:用AI将陌生代码库变成你的专属教程 你有没有过这样的经历?接手一个新项目,或者想学习一个热门的开源库,打开GitHub仓库,面对成百上千个文件、错综复杂的目录结构,瞬间感觉无从下手。README.md可…...
)
面试题:文本表示方法详解——One-hot、Word2Vec、上下文表示、BERT词向量全解析(NLP基础高频考点)
1. 为什么面试官总爱问“文本表示方法”?1.1 这个问题的本质是什么任何 NLP 系统,不管是情感分析、文本分类、搜索推荐、智能客服,还是今天的大模型应用,本质上都绕不开一个前提:机器并不真正认识“文字”,…...

AI模型评估资源精选:从标准基准到定制化实践指南
1. 项目概述:为什么我们需要一个AI评估资源精选集?如果你最近也在折腾大语言模型,无论是想自己微调一个,还是想评估市面上哪个模型更适合你的业务场景,大概率会遇到一个头疼的问题:评估标准太多了ÿ…...

HoRain云--Lua协程
🎬 HoRain云小助手:个人主页 🔥 个人专栏: 《Linux 系列教程》《c语言教程》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个超棒的服务器购买网站,性价比超高,大内存超划算!…...