C/C++ 进程间通信system V IPC对象超详细讲解(系统性学习day9)
目录
前言
一、system V IPC对象图解
1.流程图解:
编辑
2.查看linux内核中的ipc对象:
二、消息队列
1.消息队列的原理
2.消息队列相关的API
2.1 获取或创建消息队列(msgget)
实例代码如下:
2.2 发送消息到消息队列中
实例代码如下:
2.3 从消息队列中获取消息
实例代码如下:
2.4 消息队列相关的命令
2.5 管理消息队列
实例代码如下:
三、共享内存
1.概念
2.原理图解
3.相关的api函数
3.1 创建共享内存对象
实例代码如下:
3.2 映射共享内存
3.3 取消映射
实例代码reader.c如下:
实例代码writer.c如下:
实例代码shm.h 如下:
3.4 管理共享内存
实例代码如下:
四、信号灯 (信号量)
1.概念
2.信号灯相关的api函数
2.1 创建或获取信号灯对象
实例代码如下:
2.2 实现P操作和V操作
实例代码如下:
2.3 管理信号灯
实例代码如下:
总结
前言
System V IPC(Inter-Process Communication)对象是一种用于在不同进程之间进行通信的机制。它包括三种类型的对象:消息队列(Message Queue)、信号量(Semaphore)和共享内存(Shared Memory)。
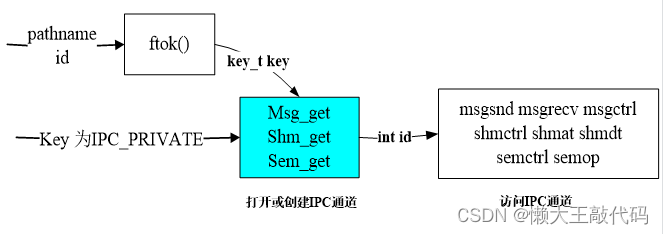
一、system V IPC对象图解
1.流程图解:
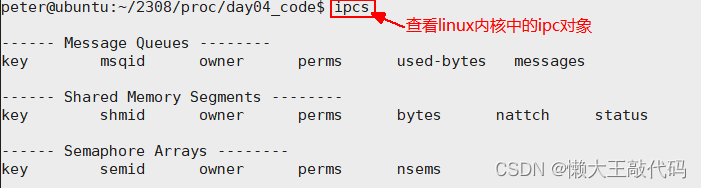
2.查看linux内核中的ipc对象:
二、消息队列
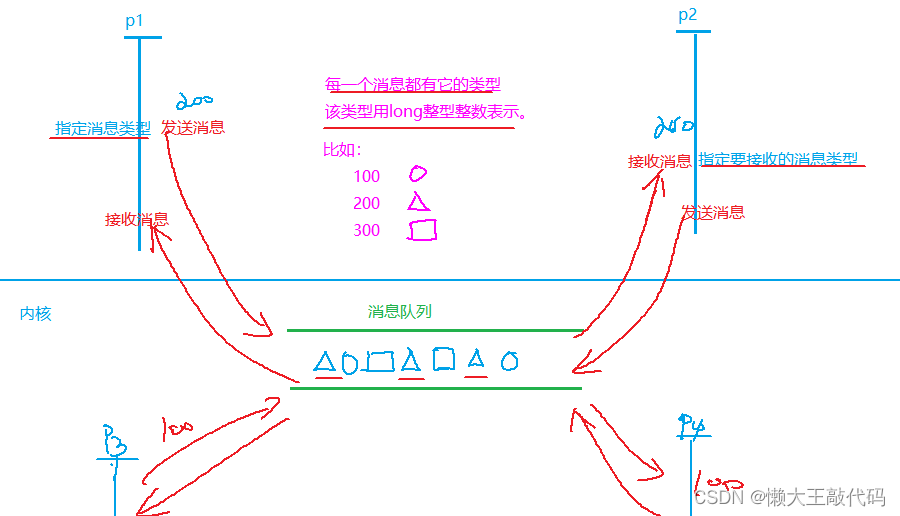
1.消息队列的原理
2.消息队列相关的API
2.1 获取或创建消息队列(msgget)
头文件:
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>int msgget(key_t key, int msgflg);
//参数1 ----- key :
动态获取key: ftok()
#include <sys/types.h>
#include <sys/ipc.h>
key_t ftok(const char *pathname, int proj_id);
//参数1 ---- 工程目录
//参数2 ---- 工程编号
//返回值 ----- 成功,返回key值,失败:-1
静态分配: IPC_PRIVATE
//参数2 ------ msgflg:如果消息队列不存在,需要给出创建的关键字,并设置权限 IPC_CREAT | 0666
//返回值 ----- 成功:消息队列的ID,失败:-1
实例代码如下:
int main(void)
{key_t key;int msg_id;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取消息对象msg_id = msgget(key,IPC_CREAT|0666);if(msg_id < 0){perror("msgget");exit(1);}return 0;
}2.2 发送消息到消息队列中
int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg);
//参数1 ----- 消息队列的id
//参数2 ----- 指向struct msgbuf结构体的指针,该结构体需要自己定义,如下:
struct msgbuf {
long mtype; /* message type, must be > 0 消息类型*/
char mtext[1]; /* message data 消息正文*/
};
//参数3 ---- 要发送的消息的长度
//参数4 ---- msgflg值如下:
IPC_NOWAIT 消息没有发送完成函数也会立即返回。
0:直到发送完成函数才返回
//返回值 --- 成功:0,失败:-1
实例代码如下:
int main(void)
{key_t key;int msg_id;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取消息对象msg_id = msgget(key,IPC_CREAT|0666);if(msg_id < 0){perror("msgget");exit(1);}//向消息队列中发送消息while(1){bzero(&buf,sizeof(buf));printf("请输入消息的类型:");scanf("%ld",&buf.mtype);printf("请输入消息:");while(getchar() != '\n'); //清空输入缓冲区fgets(buf.mtext,sizeof(buf.mtext),stdin);buf.mtext[strlen(buf.mtext)-1] = '\0';if(msgsnd(msg_id,&buf,strlen(buf.mtext),0) < 0){perror("msgsnd");exit(1);}}return 0;
}2.3 从消息队列中获取消息
ssize_t msgrcv(int msqid, void *msgp, size_t msgsz, long msgtyp, int msgflg);
//参数1 ----- 消息队列的id
//参数2 ----- 指向struct msgbuf结构体的指针,该结构体需要自己定义,如下:
struct msgbuf {
long mtype; /* message type, must be > 0 消息类型*/
char mtext[1]; /* message data 消息正文*/
};
//参数3 ---- mtext的长度
//参数4 ---- msgtyp:要接收的消息类型
msgtyp > 0 ,表示接收指定类型的消息
msgtyp = 0 ,按先后顺序依次接收不同类型消息
msgtyp < 0 ,优先接收消息类型不大于|msgtyp|的最小类型的消息
//参数5 ---- msgflg值如下:
IPC_NOWAIT 消息没有发送完成函数也会立即返回。
0:直到发送完成函数才返回
//返回值 --- 成功:0,失败:-1
实例代码如下:
int main(void)
{key_t key;int msg_id;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取消息对象msg_id = msgget(key,IPC_CREAT|0666);if(msg_id < 0){perror("msgget");exit(1);}//从消息队列中获取消息while(1){bzero(&buf,sizeof(buf));printf("请输入消息的类型:");scanf("%ld",&buf.mtype);if(msgrcv(msg_id,&buf,sizeof(buf.mtext),buf.mtype,0) < 0){perror("msgsnd");exit(1);}printf("msg:%s\n",buf.mtext);}return 0;
}2.4 消息队列相关的命令
peter@ubuntu:~/2308/proc/day04_code$ ipcs -q
------ Message Queues --------
key msqid owner perms used-bytes messages
0x0a010356 0 peter 666 61 5peter@ubuntu:~/2308/proc/day04_code$ ipcrm -q 0
peter@ubuntu:~/2308/proc/day04_code$ ipcs -q------ Message Queues --------
key msqid owner perms used-bytes messages
2.5 管理消息队列
int msgctl(int msqid, int cmd, struct msqid_ds *buf);
//参数1 ---- 消息队列ID
//参数2 ---- 功能码:
IPC_STAT:读取消息队列的属性,并将其保存在buf指向的缓冲区中。
IPC_SET:设置消息队列的属性。这个值取自buf参数。
IPC_RMID:从系统中删除消息队列。
//参数3 ----struct msqid_ds 结构体指针
struct msqid_ds {
struct ipc_perm msg_perm; /* Ownership and permissions */
time_t msg_stime; /* Time of last msgsnd(2) */
time_t msg_rtime; /* Time of last msgrcv(2) */
time_t msg_ctime; /* Time of last change */
unsigned long __msg_cbytes; /* Current number of bytes in
queue (nonstandard) */
msgqnum_t msg_qnum; /* Current number of messages
in queue */
msglen_t msg_qbytes; /* Maximum number of bytes
allowed in queue */
pid_t msg_lspid; /* PID of last msgsnd(2) */
pid_t msg_lrpid; /* PID of last msgrcv(2) */
};
实例代码如下:
int main(int argc,char **argv)
{int msg_id;msg_id = atoi(argv[1]);if(msgctl(msg_id,IPC_RMID,NULL) < 0){perror("msgget");exit(1);}return 0;
}三、共享内存
1.概念
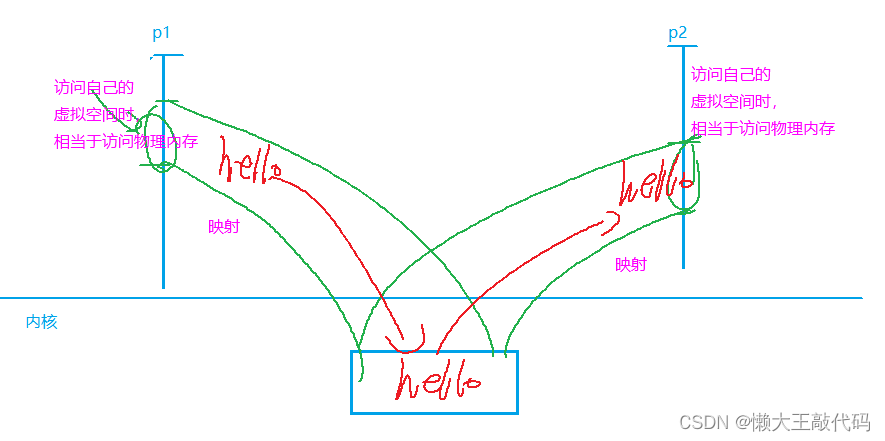
共享内存是一种最为高效的进程间通信方式,进程可以直接读写内存,而不需要任何数据的拷贝
为了在多个进程间交换信息,内核专门留出了一块内存区,可以由需要访问的进程将其映射到自己的私有地址空间
进程就可以直接读写这一内存区而不需要进行数据的拷贝,从而大大提高的效率。
由于多个进程共享一段内存,因此也需要依靠某种同步机制,如互斥锁和信号量等
2.原理图解
3.相关的api函数
3.1 创建共享内存对象
头文件:
#include <sys/ipc.h>
#include <sys/shm.h>
int shmget(key_t key, size_t size, int shmflg);
//参数1 ---- 动态获取key: ftok()
#include <sys/types.h>
#include <sys/ipc.h>
key_t ftok(const char *pathname, int proj_id);
//参数1 ---- 工程目录
//参数2 ---- 工程编号
//返回值 ----- 成功,返回key值,失败:-1
静态分配: IPC_PRIVATE
//参数2 ---- 要创建或获取的共享内存的大小
//参数3 ---- 权限:IPC_CREAT | 0666
//返回值 ---- 成功:共享内存ID,失败:-1
实例代码如下:
int main(void)
{key_t key;int shm_id;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取共享内存对象shm_id = shmget(key,SHM_SIZE, IPC_CREAT|0666);if(shm_id < 0){perror("shmget");exit(1);}return 0;
}3.2 映射共享内存
void *shmat(int shmid, const void *shmaddr, int shmflg);
//参数1 ---- 共享内存ID
//参数2 ---- 指定进程虚拟空间的映射的起始地址,一般为NULL:让系统分配一个起始地址
//参数3 ---- 访问权限:SHM_RDONLY:共享内存只读
默认0:共享内存可读写
//返回值 --- 成功:映射的虚拟空间地址,失败:-1
3.3 取消映射
int shmdt(const void *shmaddr);
//参数 ----映射的虚拟空间的起始地址
//返回值 ----成功:0,失败:-1
实例代码reader.c如下:
#include "shm.h"int main(void)
{key_t key;int shm_id;char *buf;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取共享内存对象shm_id = shmget(key,SHM_SIZE, IPC_CREAT|0666);if(shm_id < 0){perror("shmget");exit(1);}//将共享内存映射到进程的虚拟空间中buf = (char*)shmat(shm_id,NULL,0);if(buf < 0){perror("shmat");exit(1);}//打印共享内存中的数据while(1){printf("%s",buf);sleep(1);}//解除映射if(shmdt(buf) < 0){perror("shmdt");exit(1);}return 0;
}实例代码writer.c如下:
#include "shm.h"int main(void)
{key_t key;int shm_id;char *buf;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取共享内存对象shm_id = shmget(key,SHM_SIZE, IPC_CREAT|0666);if(shm_id < 0){perror("shmget");exit(1);}//将共享内存映射到进程的虚拟空间中buf = (char*)shmat(shm_id,NULL,0);if(buf < 0){perror("shmat");exit(1);}//向共享内存写数据while(1){printf("请输入字符串:");fgets(buf,SHM_SIZE,stdin);}//解除映射if(shmdt(buf) < 0){perror("shmdt");exit(1);}return 0;
}实例代码shm.h 如下:
#ifndef __SHM_H__
#define __SHM_H__#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/shm.h>#define SHM_SIZE 1024#endif
3.4 管理共享内存
int shmctl(int shmid, int cmd, struct shmid_ds *buf);
//参数1 ---- 共享内存的ID
//参数2 ---- 功能码:
IPC_STAT (获取对象属性)
IPC_SET (设置对象属性)
IPC_RMID (删除对象)
//参数3 ----struct shmid_ds 结构体指针
struct shmid_ds {
struct ipc_perm shm_perm; /* Ownership and permissions */
size_t shm_segsz; /* Size of segment (bytes) */
time_t shm_atime; /* Last attach time */
time_t shm_dtime; /* Last detach time */
time_t shm_ctime; /* Last change time */
pid_t shm_cpid; /* PID of creator */
pid_t shm_lpid; /* PID of last shmat(2)/shmdt(2) */
shmatt_t shm_nattch; /* No. of current attaches */
...
};
实例代码如下:
int main(int argc,char **argv)
{int shm_id;shm_id = atoi(argv[1]);if(shmctl(shm_id,IPC_RMID,NULL) < 0){perror("shmget");exit(1);}return 0;
}
四、信号灯 (信号量)
1.概念
信号灯(semaphore),也叫信号量。它是不同进程间或一个给定进程内部不同线程间同步的机制。
信号灯种类:
posix有名信号灯
posix基于内存的信号灯(无名信号灯)
System V信号灯(IPC对象)1》 二值信号灯:用于表示资源是否可用
值为0或1。与互斥锁类似,资源可用时值为1,不可用时值为0。2》 计数信号灯:用于表示资源的数量
值在0到n之间。用来统计资源,其值代表可用资源数3》 等待操作,也称为P操作
是等待信号灯的值变为大于0,然后将其减1;
4》 释放操作,也称为V操作
用来唤醒等待资源的进程或者线程5》System V的信号灯是一个或者多个信号灯的一个集合。其中的每一个都是单独的计数信号灯。而Posix信号灯指的是单个计数信号灯
2.信号灯相关的api函数
2.1 创建或获取信号灯对象
头文件:
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semget(key_t key, int nsems, int semflg);
//参数1 ---- 动态获取key: ftok()
#include <sys/types.h>
#include <sys/ipc.h>
key_t ftok(const char *pathname, int proj_id);
//参数1 ---- 工程目录
//参数2 ---- 工程编号
//返回值 ----- 成功,返回key值,失败:-1
静态分配: IPC_PRIVATE
//参数2 ---- 集合中信号灯的个数
//参数3 ---- 访问权限:IPC_CREAT | 0666
//返回值 ---- 成功:信号灯对象ID,失败:-1
实例代码如下:
int main(void)
{key_t key;int sem_id;//获取key值key = ftok("./",0xa);if(key < 0){perror("ftok");exit(1);}//创建或获取共享内存对象sem_id = semget(key,1, IPC_CREAT|0666);if(sem_id < 0){perror("semget");exit(1);}return 0;
}2.2 实现P操作和V操作
int semop(int semid, struct sembuf *sops, size_t nsops);
//参数1 ----- 信号灯对象的ID
//参数2 ----- 结构体指针
struct sembuf {
short sem_num; // 要操作的信号灯的编号
short sem_op; // 0 : 等待,直到信号灯的值变成0
// 1 : 释放资源,V操作
// -1 : 分配资源,P操作
short sem_flg; // 0, IPC_NOWAIT, SEM_UNDO
};//参数3 -----nops: 要操作的信号灯的个数
//返回值 ---- 成功:0,失败:-1
实例代码如下:
//1》实现P操作void sem_p(int sem_id,int index){struct sembuf buf = {index,-1,0};if(semop(sem_id,&buf,1) < 0){perror("semop");exit(1);}}
//2》实现v操作void sem_v(int sem_id,int index){struct sembuf buf = {index,1,0};if(semop(sem_id,&buf,1) < 0){perror("semop");exit(1);}}2.3 管理信号灯
int semctl(int semid, int semnum, int cmd, ...);
//参数1 ---- 信号灯对象ID
//参数2 ---- 集合中信号灯的编号
//参数3 ---- 功能码:
IPC_STAT ----获取信号灯对象属性
IPC_SET ----设置信号灯对象属性
IPC_RMID ----从内核中删除信号灯对象
SETALL ----设置集合中所有信号灯的值
SETVAL ----设置集合中编号为semnum的信号灯的值
//参数4 ---- 联合体变量,类型如下:
union semun {
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO
(Linux-specific) */
};
//返回值 -----成功:0,失败:-1
实例代码如下:
//初始化指定的信号灯
void sem_init(int sem_id,int semnum,int value)
{union semun su;su.val = value;if(semctl(sem_id,semnum,SETVAL,su) < 0){perror("semctl");exit(1);}
}
//初始化所有信号灯
void sem_init_all(int sem_id,unsigned short vals[])
{union semun su;su.array = vals;if(semctl(sem_id,0,SETALL,su) < 0){perror("semctl");exit(1);}
}总结
本篇文章针对进程间通信system V IPC对象进行详细讲解,希望能够帮到大家!
以后还会给大家展现更多关于嵌入式和C语言的其他重要的基础知识,感谢大家支持懒大王!
希望这篇博客能给各位朋友们带来帮助,最后懒大王请来过的朋友们留下你们宝贵的三连以及关注,感谢你们!
相关文章:
C/C++ 进程间通信system V IPC对象超详细讲解(系统性学习day9)
目录 前言 一、system V IPC对象图解 1.流程图解: 编辑 2.查看linux内核中的ipc对象: 二、消息队列 1.消息队列的原理 2.消息队列相关的API 2.1 获取或创建消息队列(msgget) 实例代码如下: 2.2 发送消息到消…...
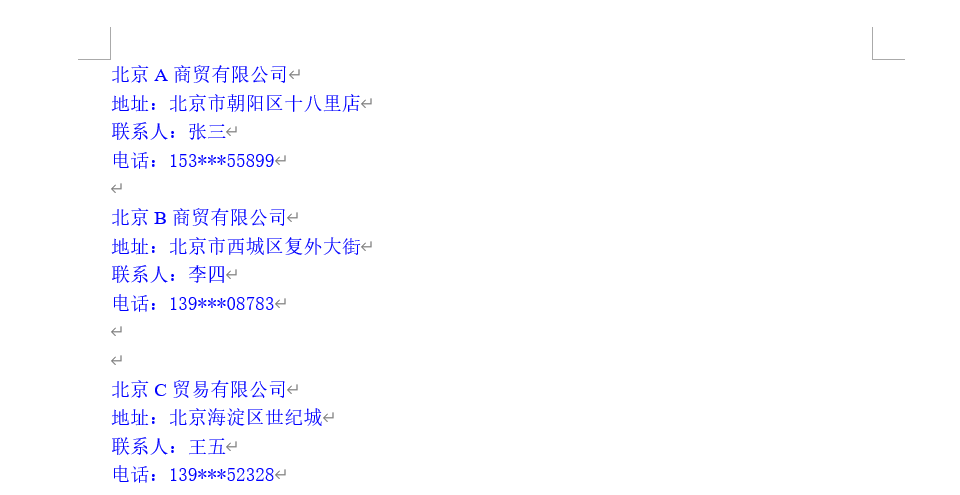
python—如何提取word中指定内容
假设有一个Word,该Word中存在 “联系人” 关键字,如何将该Word中的联系人所对应的内容提取出来呢? 该Word内容如下所示: 要在给定的Word文档中提取出与"联系人"关键字对应的内容,可以使用Python的py…...
分享几个通用个人简历模板|行业通用
Home(https://cvjury.com/) 专业设计的简历模板。 在竞争激烈的就业市场中脱颖而出的有效策略。 侧重于向招聘人员传达独特的价值主张。 帮助创建引人注目的简历、求职信和LinkedIn资料。 面向毕业生和学生的个性化简历解决方案。 添加图片注释,不超过 140 字&…...

如何正确操作封箱机
前文跟大家分享过封箱机错误操作三案例,那么封箱机到底如何才能正确操作呢?今天就和您分享一下如何正确操作封箱机。 1、确定正确的电源电压进行接入。目前国内封箱机均采用220v 50hz电源电压,但也有一些定制型设备可能使用380v电源ÿ…...
mysql面试题7:MySQL事务原理是什么?MySQL事务的隔离级别有哪些?
该文章专注于面试,面试只要回答关键点即可,不需要对框架有非常深入的回答,如果你想应付面试,是足够了,抓住关键点 面试官:MySQL事务原理是什么? MySQL事务的原理是基于ACID(原子性、一致性、隔离性、持久性)特性来实现的,具体原理如下: Atomicity(原子性):事务…...
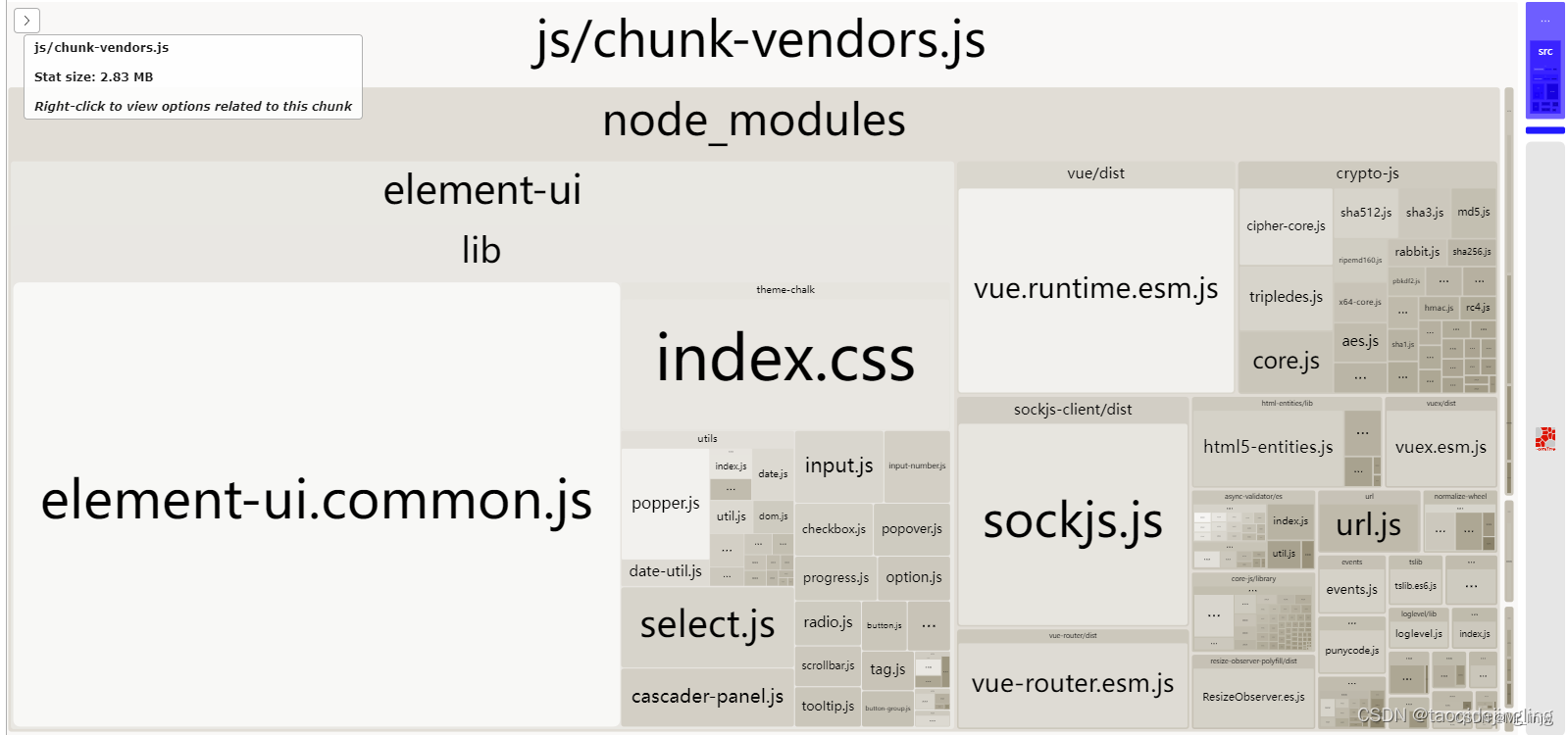
vue 项目打包性能分析插件 webpack-bundle-analyzer
webpack-bundle-analyzer 是 webpack 的插件,需要配合 webpack 和 webpack-cli 一起使用。这个插件可以读取输出文件夹(通常是 dist)中的 stats.json 文件,把该文件可视化展现,生成代码分析报告,可以直观地…...
C++ day2
1->x.mind 2->...
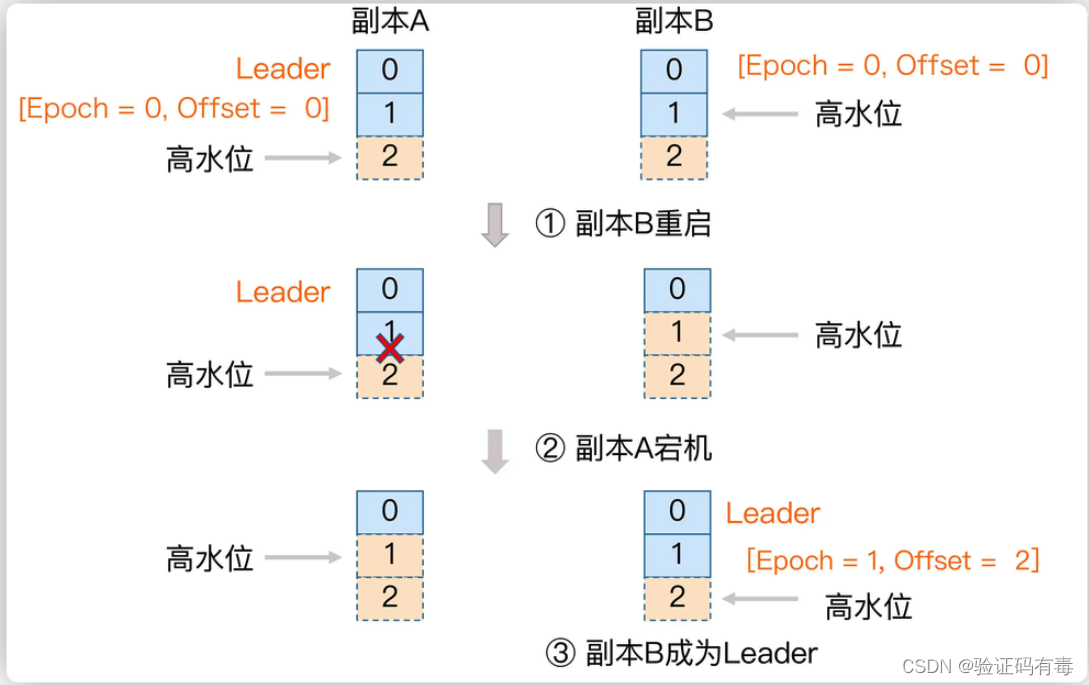
【Kafka专题】Kafka集群架构设计原理详解
目录 前言前置知识课程内容一、Kafka的Zookeeper元数据梳理1.1 zookeeper整体数据1.2 Controller Broker选举机制1.3 Leader Partition选举机制1.4 Leader Partition自动平衡机制*1.5 Partition故障恢复机制1.6 HW一致性保障-Epoch更新机制1.7 总结 学习总结感谢 前言 Kafka的…...
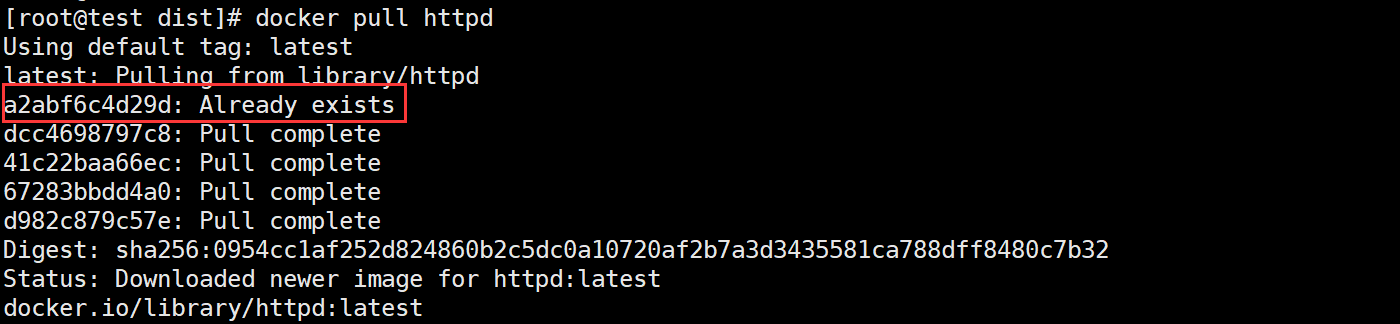
Docker 镜像的缓存特性
Author:rab 目录 前言一、构建缓存二、Pull 缓存总结 前言 首先我们要清楚,Docker 的镜像结构是分层的,镜像本身是只读的(不管任何一层),当我们基于某镜像运行一个容器时,会有一个新的可写层被…...
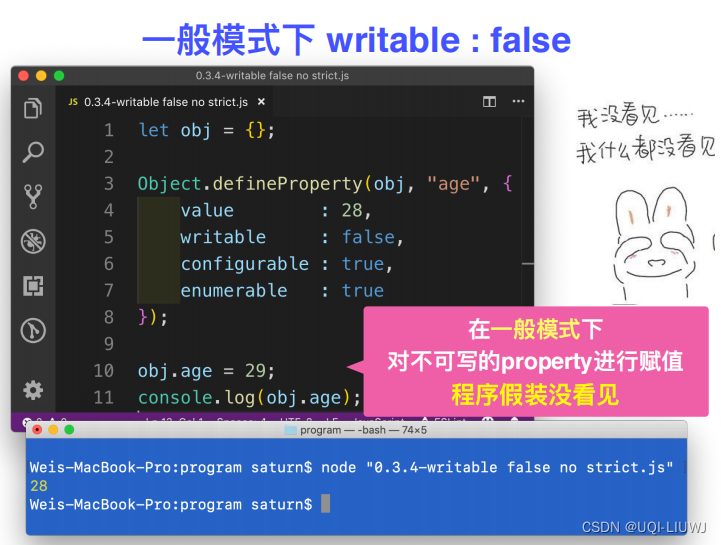
Javascript 笔记:object
一部分object可以见:JavaScript 笔记 初识JavaScript(变量)_UQI-LIUWJ的博客-CSDN博客 1 in操作符 2 hasOwnProperty 3 获取一个object所拥有的所有property 不去原型链上找 4 定义data property...

【vue3】可编辑el-table
<template><el-table:data"tableData"style"width: 100%"><el-table-columnprop"date"label"日期"width"180"><template #default"{row,$index}"><input type"text" v-mode…...

一个开源的安卓相机:OpenCamera
原网址 Open Camera download | SourceForge.net 我也上传了一个 https://github.com/quantum6/Android-OpenCamera...

分类预测 | MATLAB实现POA-CNN鹈鹕算法优化卷积神经网络多特征分类预测
分类预测 | MATLAB实现POA-CNN鹈鹕算法优化卷积神经网络多特征分类预测 目录 分类预测 | MATLAB实现POA-CNN鹈鹕算法优化卷积神经网络多特征分类预测分类效果基本描述程序设计参考资料 分类效果 基本描述 1.Matlab实现POA-CNN鹈鹕算法优化卷积神经网络多特征分类预测࿰…...
学习网络编程No.7【应用层之序列化和反序列化】
引言: 北京时间:2023/9/14/19:13,下午刚刚更完文章,是一篇很久很久以前的文章,由于各种原因,留到了今天更新,非常惭愧呀!目前在上学校开的一门网络课程,学校的课听不了一…...
小谈设计模式(10)—原型模式
小谈设计模式(10)—原型模式 专栏介绍专栏地址专栏介绍 原型模式角色分类抽象原型(Prototype)具体原型(Concrete Prototype)客户端(Client)原型管理器(Prototype Manager…...

用《斗破苍穹》的视角打开C#3 标签与反射(人物创建与斗技使用)
随着剧情的发展,主线人物登场得越来越多,时不时跳出一个大佬,对我张牙舞爪地攻击。眼花缭乱的斗技让我不厌其烦,一个不小心,我就记不清楚在哪里遇上过什么人,他会什么斗技了。这时候,我就特别希…...

c语言进阶部分详解(详细解析字符串常用函数,并进行模拟实现(下))
上篇文章介绍了一些常用的字符串函数,大家可以跳转过去浏览一下:c语言进阶部分详解(详细解析字符串常用函数,并进行模拟实现(上))_总之就是非常唔姆的博客-CSDN博客 今天接着来介绍一些&#x…...

一文看懂光模块的工作原理
你们好,我的网工朋友 光模块有很多类别,是我们经常要用到的PHY层器件。虽然封装,速率,传输距离有所不同,但是其内部组成基本是一致的。 以太网交换机常用的光模块有SFP,GBIC,XFP,X…...

基于SpringBoot的桂林旅游景点导游平台
目录 前言 一、技术栈 二、系统功能介绍 用户信息管理 景点类型管理 景点信息管理 线路推荐管理 用户注册 线路推荐 论坛交流 三、核心代码 1、登录模块 2、文件上传模块 3、代码封装 前言 随着信息技术在管理上越来越深入而广泛的应用,管理信息系统的实…...

【小程序 - 加强】自定义组件、使用npm包、全局数据共享、分包_05
目录 一、自定义组件 1. 组件的创建与引用 1.1 创建组件 1.2 引用组件 1.2.1 局部引用组件 1.2.2 全局引用组件 1.2.3 全局引用 VS 局部引用 1.2.4 组件和页面的区别 2. 样式 2.1 组件样式隔离 2.2 组件样式隔离的注意点 2.3 修改组件的样式隔离选项 2.4 styleIso…...
)
从CPU到内存:用74LS74芯片手把手教你搭建一个D边沿触发器(附波形图分析)
从面包板到示波器:用74LS74芯片实战D边沿触发器的完整指南 当你第一次在数字电路课本上看到"D边沿触发器"这个词时,是否感觉它像是一个抽象的黑盒子?教科书上的真值表和波形图虽然精确,但总缺少那么一点"触手可及&…...

开源工具优化Cursor API调用:突破限制提升开发效率的完整方案
开源工具优化Cursor API调用:突破限制提升开发效率的完整方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached y…...
)
手把手教你用Simulink和Carsim 2019搭建车辆动力学模型(附二自由度模型源码)
从零构建车辆动力学联合仿真模型:Simulink与Carsim 2019实战指南 当你第一次打开Carsim和Simulink时,面对两个庞大软件的无缝对接需求,很容易陷入"从哪开始"的困惑。本文将带你一步步搭建完整的车辆动力学仿真环境,从软…...

seq2seq-couplet错误处理与敏感词过滤:保障服务稳定性的终极指南
seq2seq-couplet错误处理与敏感词过滤:保障服务稳定性的终极指南 【免费下载链接】seq2seq-couplet Play couplet with seq2seq model. 用深度学习对对联。 项目地址: https://gitcode.com/gh_mirrors/se/seq2seq-couplet seq2seq-couplet是一个基于深度学习…...

嵌入式系统中SipHash轻量级哈希实现与优化
1. SipHash 嵌入式底层实现技术解析SipHash 是一种基于加法-循环-异或(Add-Rotate-Xor, ARX)结构的伪随机函数族,专为短输入消息设计,在嵌入式系统中广泛用于哈希表键值保护、拒绝服务(DoS)防护、安全计数器…...

CA6140车床拨叉831003加工工艺及铣左端面夹具设计【说明书+CAD图纸+SW三维】
CA6140车床拨叉831003作为机床传动系统中的关键零件,其加工质量直接影响设备运行的稳定性。该零件的加工工艺需兼顾尺寸精度与表面粗糙度要求,重点在于左端面的铣削加工。传统工艺方案多采用通用夹具定位,存在装夹效率低、重复定位精度差等问…...

3个消息保护痛点解决方案:RevokeMsgPatcher本地消息留存技术全解析
3个消息保护痛点解决方案:RevokeMsgPatcher本地消息留存技术全解析 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https:…...
)
MacBook Pro用户必看:5分钟搞定StarUML破解(M1/M2芯片专用指南)
M1/M2芯片MacBook高效配置StarUML全流程指南 当你在M1/M2芯片的MacBook上第一次打开StarUML时,可能会遇到各种兼容性问题。作为一款强大的UML建模工具,StarUML在ARM架构下的表现确实有些水土不服。但别担心,经过多次实践,我总结出…...
)
当BFD不可用时:用华为NQA+静态路由实现低成本链路监测(含ICMP测试例详解)
华为NQA静态路由:低成本链路监测的实战指南 在传统企业网络中,静态路由因其配置简单、资源消耗低的特点,常被用于小型网络或边缘设备互联。但静态路由最大的痛点在于缺乏自动检测机制——当链路出现故障时,管理员往往要等到用户投…...

ros2 跟着官方教学从零开始 CS
ros2 从零开始10 服务者和消费者C/S 前言 上节课介绍写了简单的Topic订阅模型。本章我们将要学习C/S模型,即服务者和消费者模型 背景 前面服务概念时提到过,服务是ROS2 节点的另一种通信方式。服务基于调用与响应模型,而非发布者-订阅者主题模…...