数据结构和算法(10):B-树
B-树:大数据
现代电子计算机发展速度空前,就存储能力而言,情况似乎也是如此:如今容量以TB计的硬盘也不过数百元,内存的常规容量也已达到GB量级。
然而从实际应用的需求来看,问题规模的膨胀却远远快于存储能力的增长。
在同等成本下,存储器的容量越大(小)则访问速度越慢(快)。
实践证明,分级存储是行之有效的方法。在由内存与外存(磁盘)组成的二级存储系统中,数据全集往往存放于外存中,计算过程中则可将内存作为外存的高速缓存,存放最常用数据项的复本。借助高效的调度算法,如此便可将内存的“高速度”与外存的“大容量”结合起来。
两个相邻存储级别之间的数据传输,统称I/O操作。(各级存储器的访问速度相差悬殊,故应尽可能地减少I/O操作)
以内存与磁盘为例,其单次访问延迟大致分别在纳秒(ns)和毫秒(ms)级别,相差5至6个数量级。对内存而言的一秒/一天,相当于磁盘的一星期/两千年。
多路搜索树(二叉搜索树与四路搜索树):将通常的二叉搜索树,改造为多路搜索树——在中序遍历的意义下,这也是一种等价变换。
 以两层为间隔,将各节点与其左、右孩子合并为“大节点”:原节点及其孩子的共三个关键码予以保留;孩子节点原有的四个分支也予以保留并按中序遍历次序排列;节点到左、右孩子的分支转化为“大节点”内部的搜索,在图中表示为水平分支。如此改造之后,每个“大节点”拥有四个分支,故称作四路搜索树。
以两层为间隔,将各节点与其左、右孩子合并为“大节点”:原节点及其孩子的共三个关键码予以保留;孩子节点原有的四个分支也予以保留并按中序遍历次序排列;节点到左、右孩子的分支转化为“大节点”内部的搜索,在图中表示为水平分支。如此改造之后,每个“大节点”拥有四个分支,故称作四路搜索树。
B-树:结构
所谓 m m m 阶 B-树,即 m m m 路平衡搜索树( m ≥ 2 m \geq 2 m≥2)
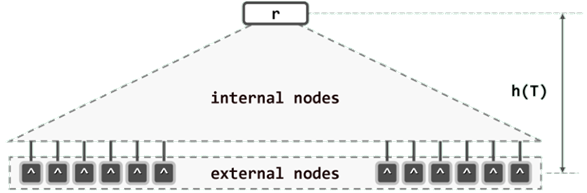
所有外部节点的深度统一相等。同时,每个内部节点都存有不超过m - 1个关键码,以及用以指示对应分支的不超过 m 个引用。
具体地,存有 n ≤ m − 1 n \leq m - 1 n≤m−1 个关键码: K 1 < K 2 < K 3 < K 4 < . . . < K n K_1 < K_2 <K_3 < K_4 < ... < K_n K1<K2<K3<K4<...<Kn 的内部节点,同时还配有 n + 1 ≤ m n+1 \leq m n+1≤m 个引用: A 0 < A 1 < A 2 < A 3 < A 4 < . . . < A n A_0 < A_1 <A_2<A_3 < A_4 <...<A_n A0<A1<A2<A3<A4<...<An。
反过来,各内部节点的分支数也不能太少。具体地,除根以外的所有内部节点,都应满足: n + 1 ≥ [ m / 2 ] n+1 \geq [m /2] n+1≥[m/2],而在非空的 B-树中,根节点应满足: n + 1 ≥ 2 n+1 \geq 2 n+1≥2。
由于各节点的分支数介于 [ m / 2 ] [m/2] [m/2] 至 m m m 之间,故 m m m 阶B-树也称作 ( m / 2 m/2 m/2, m)-树。
所有叶节点的深度统一相等。
计算B-树高度时,还需要计入其最底层的外部节点:树高 h = 外部节点的深度
实现
B-树节点
#include "../vector/vector.h"
#define BTNodePosi(T) BTNode<T>* //B-树节点位置template <typename T> struct BTNode { //B-树节点模板类
// 成员(为简化描述起见统一开放,读者可根据需要迕一步封装)BTNodePosi(T) parent; //父节点Vector<T> key; //关键码向量Vector<BTNodePosi(T)> child; //孩子向量(其长度总比key多一)
// 构造函数(注意:BTNode叧能作为根节点创建,而且初始时有0个关键码和1个空孩子指针)BTNode() { parent = NULL; child.insert ( 0, NULL ); }BTNode ( T e, BTNodePosi(T) lc = NULL, BTNodePosi(T) rc = NULL ) {parent = NULL; //作为根节点,而且初始时key.insert ( 0, e ); //叧有一个关键码,以及child.insert ( 0, lc ); child.insert ( 1, rc ); //两个孩子if ( lc ) lc->parent = this; if ( rc ) rc->parent = this;}
};
B-树
#include“BTNode.h” //引入B-树节点类template <typename T> class BTree [ //B-树模板类
protected:int _size;//存放的关键码总数int _order; //B-树的阶次,至少为3--创建时指定,一般不能修改BTNodePosi(T)_root; //根节点BTNodePosi(T)_hot; //BTree::search()最后访问的非空( 除非树空)的节点位置void solveOverflow ( BTNodePosi(T) ); //因插入而上溢之后的分裂处理void solveUnderflow ( BTNodePosi(T) ); //因删除而下溢之后的合并处理
public:BTree ( int order = 3 ): _order ( order ),_size ( ) //构造函数:默认为最低的3阶{_root = new BTNode<T>();}~BTree(){ if ( _root ) release ( _root );} //析构函数:释放所有节点int const order(){ return _order; } //阶次int const size(){ return _size; } //规模BTNodePosi(T) & root() { return_root;} //树根bool empty() const { return !_root;} //判空BTNodePosi(T) search ( const T& e ); //查找bool insert ( const T& e ); //插入bool remove ( const T& e ); //删除
}; //BTree
B-树:查找
只载入必需的节点,尽可能减少 I/O 操作。

可以将大数据集组织为 B-树并存放于外存。对于活跃的B-树,其根节点会常驻于内存;此外,任何时刻通常只有另一节点(称作当前节点)留驻于内存。
过程:
先以根节点作为当前节点,然后再逐层深入。若在当前节点(所包含的一组关键码)中能够找到目标关键码,则成功返回。否则(在当前节点中查找“失败”),则必可在当前节点中确定某一个引用(“失败”位置),并通过它转至逻辑上处于下一层的另一节点。若该节点不是外部节点,则将其载入内存,并更新为当前节点,然后继续重复上述过程。
实现
template<typename T> BTNodePosi(T) BTree<T>::search ( const T& e ) //在B-树中查找关键码eBTNodePosi(T) v =_root; _hot = NULL; //从根节点出发while ( v ){ //逐层查找Rank r = v->key.search ( e ); //在当前节点中,找到不大于e的最大关键码if ( ( 0 <= r ) && ( e == v->key[r] ) ) return v; //成功:在当前节点中命中目标关键码_hot = v; v = v->hild[r + 1]; //否则,转入对应子树(_hot指向其父)--需做I/0,最费时间}//这里在向量内是二分查找,但对通常的_order可直接顺序查找return NULL; //失败:最终抵达外部节点
}
成功时返回目标关键码所在的节点,上层调用过程可在该节点内进一步查找以确定准确的命中位置;失败时返回对应外部节点,其父节点则由变量_hot指代。
性能分析
B-树查找操作所需的时间消耗于两个方面:1.将某一节点载入内存;2.在内存中对当前节点进行查找。
对于高度为h的B-树,外存访问不超过O(h - 1)次.
若存有N个关键码的m阶B-树高度为h,则必有: log m ( N + 1 ) ≤ h ≤ l o g [ m / 2 ] [ ( N + 1 ) / 2 ] + 1 \log_m(N+1) \leq h \leq log_{[m/2]}[(N+1)/2]+1 logm(N+1)≤h≤log[m/2][(N+1)/2]+1
也就是说,存有N个关键码的m阶B-树的高度 h = Θ ( log m N ) h = \Theta (\log_m N) h=Θ(logmN)。
每次查找过程共需访问 O ( log m N ) O(\log_m N) O(logmN) 个节点,相应地需要做 O ( log m N ) O(\log_m N) O(logmN) 次外存读取操作。由此可知,对存有 N N N 个关键码的 m m m 阶B-树的每次查找操作,耗时不超过 O ( l o g m N ) O(log_m N) O(logmN)。
尽管没有渐进意义上的改进,但相对而言极其耗时的I/O操作的次数,却已大致缩减为原先的1/log2 m。
B-树:插入
关键码插入
template <typename T> boo BTree<T>::insert ( const T& e ){ //将关键码e插入B树中BTNodePosi(T) v = search ( e ); if ( v )return false; //确认目标节点不存在Rank r = _hot->key.search ( e ); //在节点_hot的有序关键码向量中查找合适的插入位置_hot->key.insert ( r + 1,e ); //将新关键码插至对应的位置_hot->child.insert ( r + 2,NULL ); //创建一个空子树指针_size++;//更新全树规模solveOverflow (_hot); //如有必要,需做分裂return true; //插入成功
}
为在B-树中插入一个新的关键码 e,首先调用search(e)在树中查找该关键码。若查找成功,则按照“禁止重复关键码”的约定不予插入,操作即告完成并返回false。
查找过程必然终止于某一外部节点v,且其父节点由变量_hot指示。当然,此时的_hot必然指向某一叶节点(可能同时也是根节点)。接下来,在该节点中再次查找目标关键码e。尽管这次查找注定失败,却可以确定e在其中的正确插入位置r。最后,只需将e插至这一位置。
至此,_hot所指的节点中增加了一个关键码。若该节点内关键码的总数依然合法(即不超过m - 1个),则插入操作随即完成。否则,称该节点发生了一次上溢(overflow),此时需要通过适当的处理,使该节点以及整树重新满足B-树的条件。
上溢与分裂
一般地,刚发生上溢的节点,应恰好含有 m m m 个关键码。若取 s = [ m / 2 ] s = [m/2] s=[m/2],则它们依次为: { k 0 , . . . , k s − 1 ; k s ; k s + 1 , . . . , k m − 1 } \{ k_0,...,k_{s-1};k_s;k_{s+1},...,k_{m-1} \} {k0,...,ks−1;ks;ks+1,...,km−1}。可见,以 k s k_s ks 为界,可将该节点分前、后两个子节点,且二者大致等长。于是,可令关键码 k s k_s ks上升一层,归入其父节点(若存在)中的适当位置,并分别以这两个子节点作为其左、右孩子。这一过程,称作节点的分裂。
实现
template<typename T> //关键码插入后若节点上溢,则做节点分裂处理
void BTree<T>::solveOverflow ( BTNodePosi(T) v ) {if (_order >= v->child.size() ) return; //递归基:当前节点并未上溢Rank s = _order / 2; //轴点(此时应有_order = key.size() = child.size() - 1)BTNodePosi(T) u = new BTNode<T>();//注意:新节点已有一个空孩子for ( Rank j= 0;j< _order - s - 1; j++ ) {//v右侧_order-s-1个孩子及关键码分裂为右侧节点uu->child.insert ( j,v->child.remove ( s +1));//逐个移动效率低u->key.insert ( j,v->key.remove ( s +1));//此策略可改进}u->child[_order - - 1] = V->child.remove ( s + );//移动v最靠右的孩子if ( u->child[e] ) //若u的孩子们非空,则for ( Rank j= ;j< _order - s; j++ ) //令它们的父节点统一u->child[j]->parent = u; //指向uBTNodePosi(T) p = v->parent; //v当前的父节点pif ( !p )[_root = p = new BTNode<T>(); p->child[0] = v; v->parent = p;} //若p空则创建之Rank r = 1 + p->key.search ( v->key[0] ); //p中指向u的指针的秩p->key.insert ( r,v->key.remove ( s ) ); //轴点关键码上升p->child.insert (r + 1,u );u->parent = p;//新节点u与父节点p互联solveOverflow ( p ); //上升一层,如有必要则继续分裂——至多递归O(logn)层
}
上溢持续传播至根的情况:原树根分裂之后,新创建的树根仅含单关键码。由此也可看出,就B-树节点分支数的下限要求而言,树根节点的确应该作为例外。
复杂度
若将B-树的阶次m视作为常数,则关键码的移动和复制操作所需的时间都可以忽略。至于solveOverflow()算法,其每一递归实例均只需常数时间,递归层数不超过B-树高度。由此可知,对于存有N个关键码的m阶B-树,每次插入操作都可在O(logm N)时间内完成。
B-树:删除
template <typename T> bool BTree<T>::remove ( const T& e ) { //从BTree树中删除关键码eBTNodePosi(T) v = search ( e ); if ( !v ) return false; //确认目标关键码存在Rank r = v->key.search ( e );//确定目标关键码在节点v中的秩(由上,肯定合法)if ( v->child[0] ) { //若v非叶子,则e的后继必属于某叶节点BTNodePosi(T) u = v->child[r+1]; //在右子树中一直向左,即可while ( u->child[0] ) u = u->child[0]; //找出e的后继v->key[r] = u->key[e]; v = u; r = 0; //并与之交换位置} //至此,v必然位于最底层,且其中第r个关键码就是待删除者v->key. remove ( r ); v->child.remove ( r + 1 ); _size--; //删除e,以及其下两个外部节点之一solveUnderflow ( v );// 如有必要,需做旋转或合并
return true;
为从 B-树中删除关键码 e,也首先需要调用 search(e) 查找 e 所属的节点。倘若查找失败,则说明关键码 e 尚不存在,删除操作即告完成:否则按照代码的出口约定,目标关键码所在的节点必由返回的位置v指示。此时,通过顺序查找,即可进一步确定e在节点v中的秩r。
不妨假定v是叶节点——否则,e的直接前驱(后继)在其左(右)子树中必然存在,而且可在O(height(v))时间内确定它们的位置,其中height(v)为节点v的高度。此处不妨选用直接后继。于是,e的直接后继关键码所属的节点u必为叶节点,且该关键码就是其中的最小者u[0]。既然如此,只要令e与u[0]互换位置,即可确保待删除的关键码e所属的节点v是叶节点。
接下来可直接将e(及其左侧的外部空节点)从v中删去。如此,节点v中所含的关键码以及(空)分支将分别减少一个。若该节点所含关键码的总数依然合法(即不少于[m/2] - 1),则删除操作随即完成。否则,称该节点发生了下溢,并需要通过适当的处置,使该节点以及整树重新满足 B-树的条件。
下溢与合并
在m阶B-树中,刚发生下溢的节点V必恰好包含[m/2] - 2个关键码和[m/2] - 1个分支。
1.V 的左兄弟 L 存在,且至少包含 [m/2] 个关键码
 将
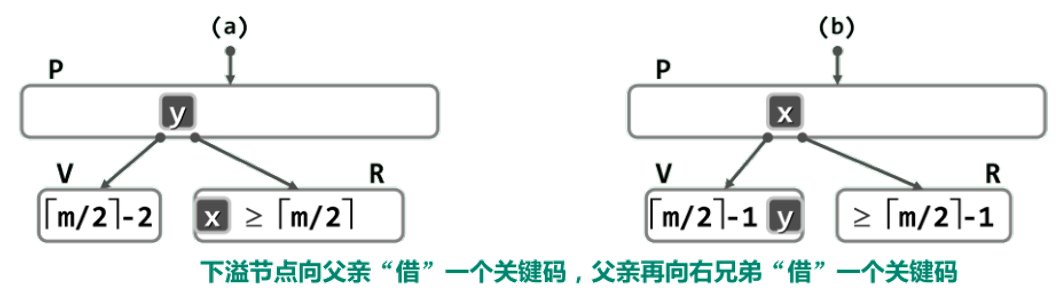
将y从节点P转移至节点V中(作为最小关键码),再将x从L转移至P中(取代原关键码y)
2.V 的右兄弟 R 存在,且至少包含 [m/2]个
3.V 的左、右兄弟 L 和R 或者不存在,或者其包含的关键码均不足 [m/2] 个
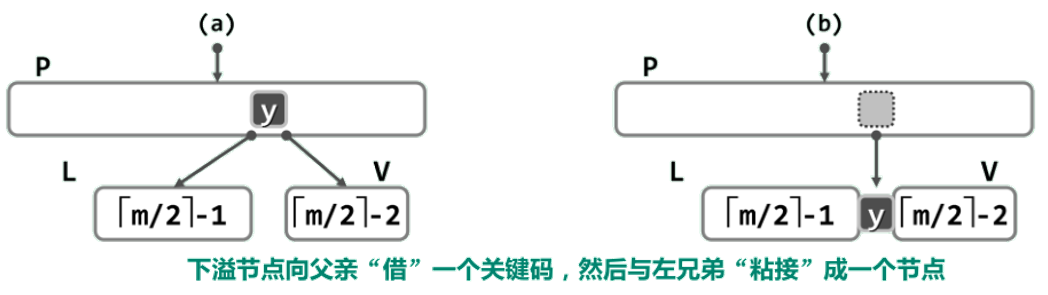
从父节点P中抽出介于L和V之间的关键码y,并通过该关键码将节点L和V“粘接”成一个节点——这一过程称作节点的合并。
在经如此合并而得新节点中,关键码总数应为:([m/2] - 1) + 1 + ([m/2] - 2) = 2*[m/2] - 2 <= m - 1
故原节点V的下溢缺陷得以修复,而且同时也不致于反过来引发上溢。
修复之后仍可能导致祖父节点以及更高层节点的下溢——这种现象称作下溢的传递。特别地,当下溢传递至根节点且其中不再含有任何关键码时,即可将其删除并代之以其唯一的孩子节点,全树高度也随之下降一层。
与上溢传递类似地,每经过一次下溢修复,新下溢节点的高度都必然上升一层。整个下溢修复的过程中至多需做O(log m N)次节点合并操作。
复杂度
与插入操作同理,在存有N个关键码的m阶 B-树中的每次关键码删除操作,都可以在O(logm N)时间内完成。另外同样地,因某一关键码的删除而导致 O ( l o g m N ) \mathcal O(log m N) O(logmN) 次合并操作的情况也极为罕见,单次删除操作过程中平均只需做常数次节点的合并。
相关文章:
数据结构和算法(10):B-树
B-树:大数据 现代电子计算机发展速度空前,就存储能力而言,情况似乎也是如此:如今容量以TB计的硬盘也不过数百元,内存的常规容量也已达到GB量级。 然而从实际应用的需求来看,问题规模的膨胀却远远快于存储能…...

VR会议:远程带看功能,专为沉浸式云洽谈而生
随着科技的不断发展,VR技术已经成为当今市场上较为热门的新型技术之一了,而VR会议远程带看功能,更是为用户提供更加真实、自然的沉浸式体验。 随着5G技术的发展,传统的图文、视频这种展示形式已经无法满足消费者对信息真实性的需求…...
实验室管理系统LIMS
在数字化浪潮中,越来越多的企业开始有数字化转型的意识。对于实验室而言,数字化转型是指运用新一代数字技术,促进实验室业务、生产、研发、管理、服务、供应链等方面的转型与升级,实现实验室业务“人、机、料、法、环”的多维度发…...
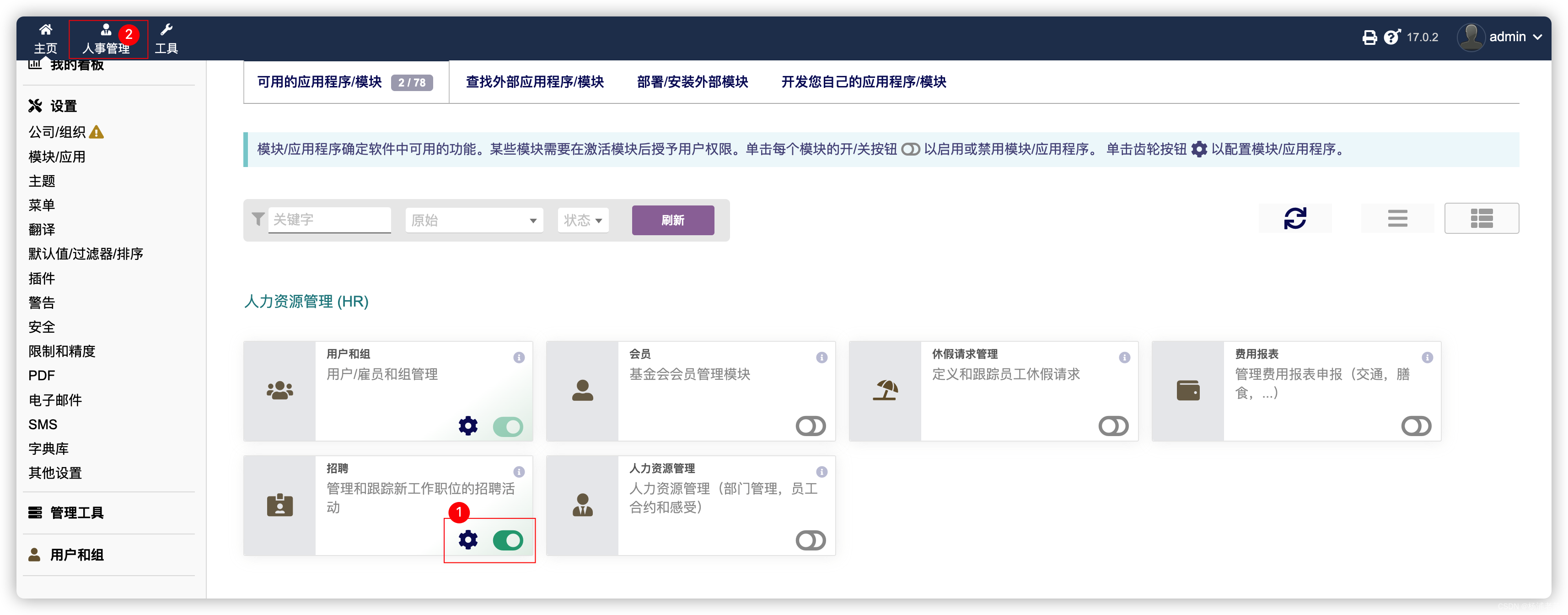
开源ERP和CRM套件Dolibarr
什么是 Dolibarr ? Dolibarr ERP & CRM 是一个现代软件包,用于管理您组织的活动(联系人、供应商、发票、订单、库存、议程…)。它是开源软件(用 PHP 编写),专为中小型企业、基金会和自由职业…...

视频号双11激励政策,快来看一看
双十一即将来临,不少平台都公布了自己的双十一政策。这篇文章,我们来看看视频号推出的激励政策,看有哪些需要准备的。...
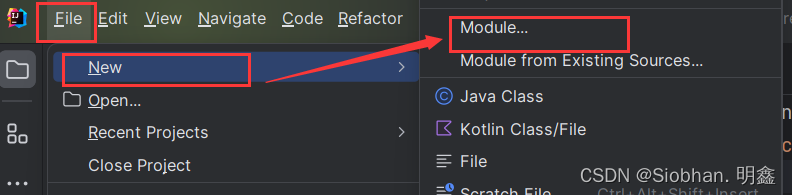
Maven最新版本安装及配置
Maven是一个Java项目管理和构建工具,它可以定义项目结构、项目依赖,并使用统一的方式进行自动化构建,是Java项目不可缺少的工具。 本章我们详细介绍如何使用Maven。 一、Maven是什么? 如果每一个项目都自己搞一套配置…...

探索ClickHouse——使用MaterializedPostgreSQL同步PostgreSQL数据库
安装PostgreSQL sudo apt install postgresql修改配置 sudo vim /etc/postgresql/14/main/postgresql.conf 解开并修改wal_level 的配置项 wal_level logical 重启服务 /etc/init.d/postgresql restartRestarting postgresql (via systemctl): postgresql.service AUTHENTI…...

《向量数据库指南》——向量数据库 有必要走向专业化吗?
向量数据库 有必要走向专业化吗? 向量数据库系统的诞生,来源于具体业务需求——想要高效处理海量的向量数据,就需要更细分、更专业的数据基础设施,为向量构建专门的数据库处理系统。 但这种路径是必须的吗? 从产品层面讲,如果传统数据库厂商不单独研发向量数据库,那么…...

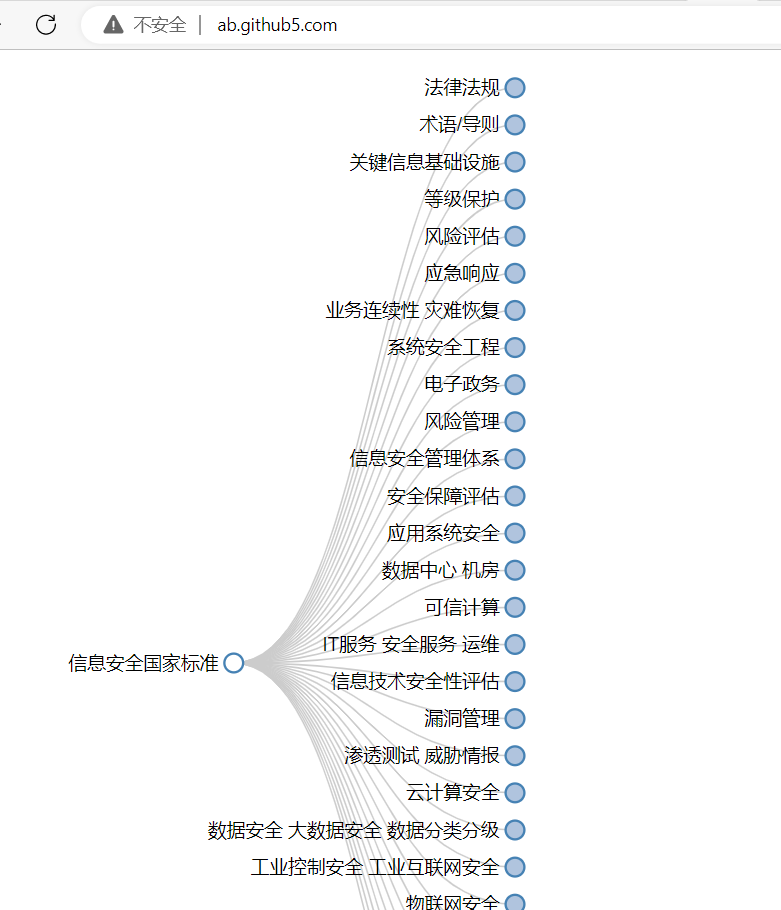
你必须知道的数据查询途径!!
在当今信息爆炸的时代,我们每天都会面临海量的数据和信息。如何在这些繁杂的信息中快速、准确地找到自己需要的内容,也是当代一个非常重要的技能。下面,我将介绍几种你必须知道的企业数据信息查找途径。 1. 搜索引擎 搜索引擎是我们日常中…...
火焰原子吸收光谱法、容量法和电感耦合等离子体发射光谱法
声明 本文是学习GB-T 1871.5-2022 磷矿石和磷精矿中氧化镁含量的测定 火焰原子吸收光谱法、容量法和电感耦合等离子体发射光谱法. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们 1 范围 本文件描述了在磷矿石和磷精矿中测定氧化镁含量的火焰原子吸收…...

亚马逊云科技 2023 柏林峰会主题演讲总结
欢迎来到我们的亚马逊云科技2023柏林峰会主题演讲全面总结!在这篇文章中,我们将深入探讨在活动期间分享的主要公告、亮点和故事。通过这里的视频格式,展示了亚马逊云科技技术如何转化为商业和行业。 每年,亚马逊云科技峰会都会汇…...

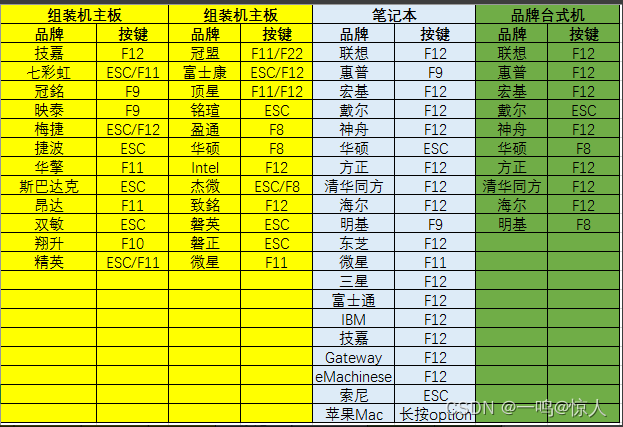
CentOS Stream9 安装远程桌面服务 Xrdp
1. 安装 XRDP 若服务器本身没有桌面则首先需要安装本地桌面: yum -y groups install "GNOME Desktop" startx配置源: dnf install epel-release安装 xrdp dnf install xrdp 2. 配置 Xrdp Xrdp 配置文件位于 /etc/xrdp 目录中。对于常规 X…...
实施运维01
一.运维实施工程师所具备的知识 1.运维工程师,实施工程师是啥? 运维工程师负责服务的稳定性,确保服务无间断的为客户提供服务. 实施工程师负责工程的实施工作,负责现场培训,一般都要出差,哪里有项目就去…...

MySQL大表直接复制文件的copy方式
看腻了就来听听视频演示吧:https://www.bilibili.com/video/BV1Bp4y1F7kd/ MyISAM引擎可单独将 *.MYD和 *.MYI 拷贝到远程服务器上InnoDB引擎受限于版本(MySQL5.5)无法直接拷贝.ibd文件,因为在ibdata1文件保存有表的字典信息&…...
Redis-集群
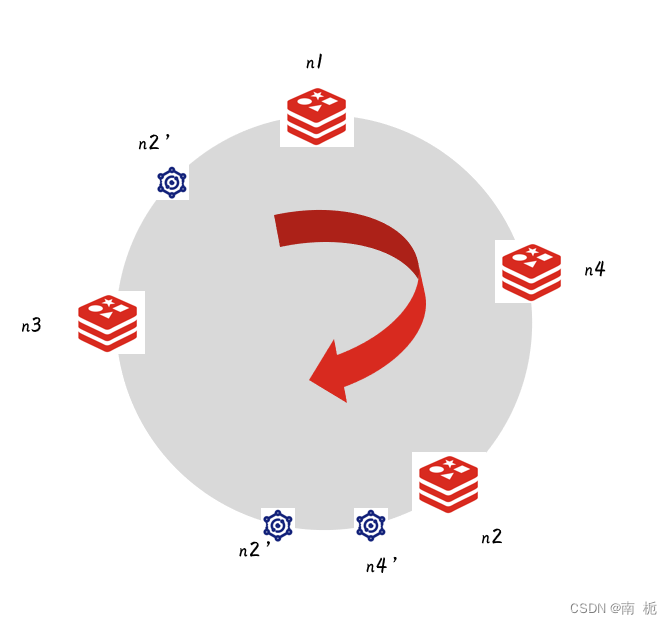
Redis-集群 主从复制和哨兵只能在主节点进行写数据,从节点读取数据,因此本质上,是进行了读写的分离,每个节点都保存了所有的数据,并不能实现一个很好的分布式效果。 1.哈希求余算法 假设有N台主机,对每台…...

使用CrawlSpider爬取全站数据。
CrawpSpider和Spider的区别 CrawlSpider使用基于规则的方式来定义如何跟踪链接和提取数据。它支持定义规则来自动跟踪链接,并可以根据链接的特征来确定如何爬取和提取数据。CrawlSpider可以对多个页面进行同样的操作,所以可以爬取全站的数据。CrawlSpid…...
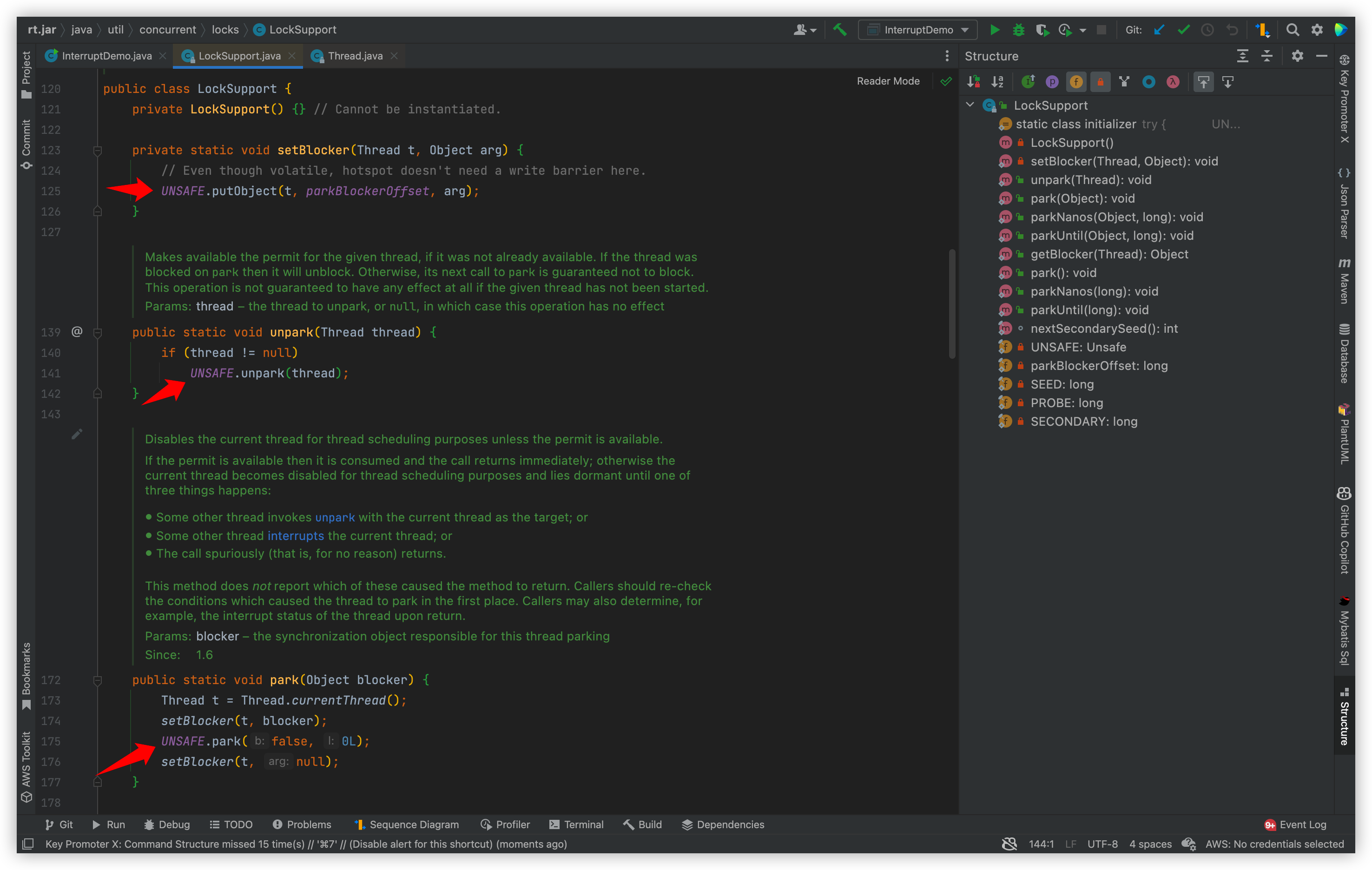
【JUC】Java并发编程从挖坑到入土全解(4-一文讲通LockSupport与线程中断->长图预警)
目录 LockSupport与线程中断 线程中断机制 什么是中断机制? 与中断相关的3个API 如何停止中断运行中的线程? 当前线程的中断标识为true,是不是线程就会立刻停止? 如何理解静态方法Thread.interrupted() LockSupport是什么…...
Springboot学习笔记——3
Springboot学习笔记——3 一、热部署1.1、手动启动热部署1.2、自动启动热部署1.3、热部署范围配置1.4、关闭热部署 二、配置高级2.1、第三方bean属性绑定2.2、松散绑定2.3、常用计量单位应用2.4、bean属性校验2.5、进制数据转换规则 三、测试3.1、加载测试专用属性3.2、加载测试…...
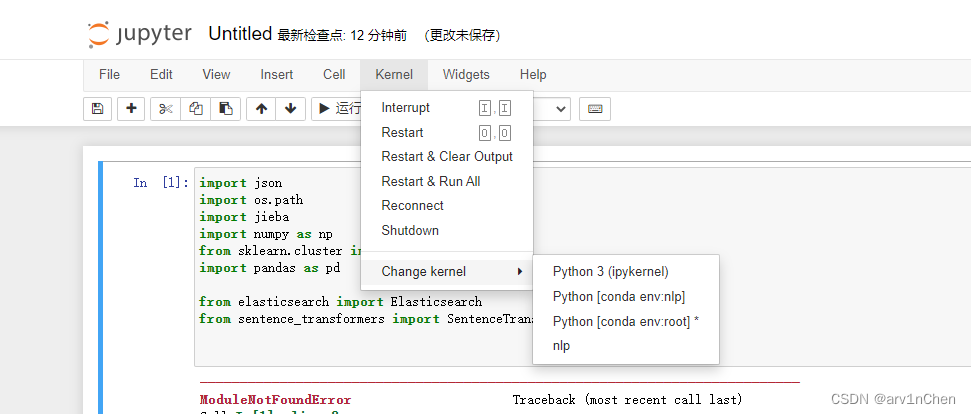
jupyter 切换虚拟环境
当前只有两个环kernel 我已经创建了很多虚拟环境,如何在notebook中使用这些虚拟环境呢?请看下面 比如说我要添加nlp 这个虚拟环境到notebook中 1. 切换到nlp环境 2. 安装如下模块 pip install ipykernel 3. 执行如下命令 python -m ipykernel install …...

如何在Apache和Resin环境中实现HTTP到HTTPS的自动跳转:一次全面的探讨与实践
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...

nv-context:开发者必备的上下文管理工具,提升开发效率与团队协作
1. 项目概述:一个为开发者量身定制的上下文管理工具 如果你是一名开发者,尤其是在处理大型项目、复杂配置或者需要频繁切换工作环境时,一定对“上下文”这个概念又爱又恨。爱的是,它能帮你隔离环境、管理配置,让项目井…...

Rust命令行工具开发实战:从架构设计到工程化发布
1. 项目概述:为什么是Rust,为什么是命令行工具?最近几年,如果你关注过系统编程或者高性能工具领域,Rust这个词出现的频率会越来越高。它不再是一个“未来之星”,而是实实在在地在重塑我们手中的工具链。我自…...

【ElevenLabs意大利文语音实战指南】:20年AI语音工程师亲授7大避坑要点与本地化发音优化秘技
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs意大利文语音技术全景概览 ElevenLabs 的意大利文语音合成(TTS)能力已覆盖标准托斯卡纳发音、自然语调建模与多情感适配,支持从新闻播报到戏剧旁白的多样化…...

游戏资源提取终极指南:如何用QuickBMS轻松解包400+格式的游戏文件
游戏资源提取终极指南:如何用QuickBMS轻松解包400格式的游戏文件 【免费下载链接】QuickBMS QuickBMS by aluigi - Github Mirror 项目地址: https://gitcode.com/gh_mirrors/qui/QuickBMS 想要从游戏中提取音乐、贴图、模型等资源吗?QuickBMS是…...
Transformer在CV领域的新秀:拆解TransWeather如何用‘天气查询’一招解决多任务难题
Transformer在CV领域的新秀:拆解TransWeather如何用‘天气查询’一招解决多任务难题 计算机视觉领域正经历一场由Transformer架构引领的革命。从最初的图像分类任务到如今的复杂场景理解,Transformer以其强大的全局建模能力不断刷新着各项基准。而在天气…...

终极指南:如何用免费软件完全掌控Windows电脑风扇噪音与散热平衡
终极指南:如何用免费软件完全掌控Windows电脑风扇噪音与散热平衡 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_T…...

向量寄存器文件优化:Register Dispersion技术解析
1. 向量寄存器文件的技术挑战与优化背景在处理器架构设计中,向量寄存器文件(Vector Register File, VRF)作为向量处理单元(VPU)的核心组件,承担着存储和管理向量数据的关键任务。传统VRF设计通常采用固定数…...

从CenterFusion到车道线检测:聊聊DLAseg模型里可变形卷积的实战调优心得
从CenterFusion到车道线检测:DLAseg模型中可变形卷积的工程实践与调优策略 在自动驾驶和计算机视觉领域,特征提取网络的设计直接影响着感知系统的性能上限。Deep Layer Aggregation (DLA) 作为特征融合的经典方法,通过层级聚合机制实现了多尺…...
)
ArcGIS实战:手把手教你拼接与裁剪全国10米建筑高度栅格数据(以武汉为例)
ArcGIS实战:全国10米建筑高度栅格数据的精准处理与武汉应用 引言:高精度建筑数据的价值与挑战 城市规划师李明最近在武汉某旧城改造项目中遇到了棘手问题——传统30米分辨率的建筑高度数据无法准确反映老城区复杂的建筑形态差异。当他尝试获取更高精度的…...

Windows 10系统瘦身实战:用Win10BloatRemover打造高效纯净系统
Windows 10系统瘦身实战:用Win10BloatRemover打造高效纯净系统 【免费下载链接】Win10BloatRemover Configurable CLI tool to easily and aggressively debloat and tweak Windows 10 by removing preinstalled UWP apps, services and more. Originally based on …...