【opencv】windows10下opencv4.8.0-cuda C++版本源码编译教程
【opencv】windows10下opencv4.8.0-cuda C++版本源码编译教程
提示:博主取舍了很多大佬的博文并亲测有效,分享笔记邀大家共同学习讨论
文章目录
- 【opencv】windows10下opencv4.8.0-cuda C++版本源码编译教程
- 前言
- 准备工具
- cuda/cudnn
- cmake
- opencv4.8.0
- opencv_contrib
- CMake编译
- VS2019编译
- 可能出现的问题
- cmake编译过程中可能出现的问题
- VS2019编译过程中可能出现的问题
- 测试使用GPU
- 总结
前言
OpenCV是一个开源的计算机视觉库,包含了核心模块和扩展模块,提供了基础的图像处理和计算机视觉算法,以及一些机器学习工具。而OpenCV Contrib是OpenCV社区贡献的一组扩展模块之一,包含了一些较为新颖和实用的算法和工具函数,提供了一些高级的图像处理和计算机视觉算法。这些功能和算法可能不适合所有用户或者还处于实验性阶段。OpenCV Contrib模块中的代码由社区贡献者开发和维护,它们提供了一些在OpenCV核心库中尚未包含的新特性和实验性功能。
准备工具
cmake、vs2019、opencv4.8.0、opencv_contrib-4.8.0、cuda、cudnn
cuda/cudnn
安装cuda、cudnn可以参考此前博主的【深度学习windows10环境配置详细教程】,因为对于新手来说,需要注意的细节比较多,这里不浪费篇幅重复讲述了。
cmake
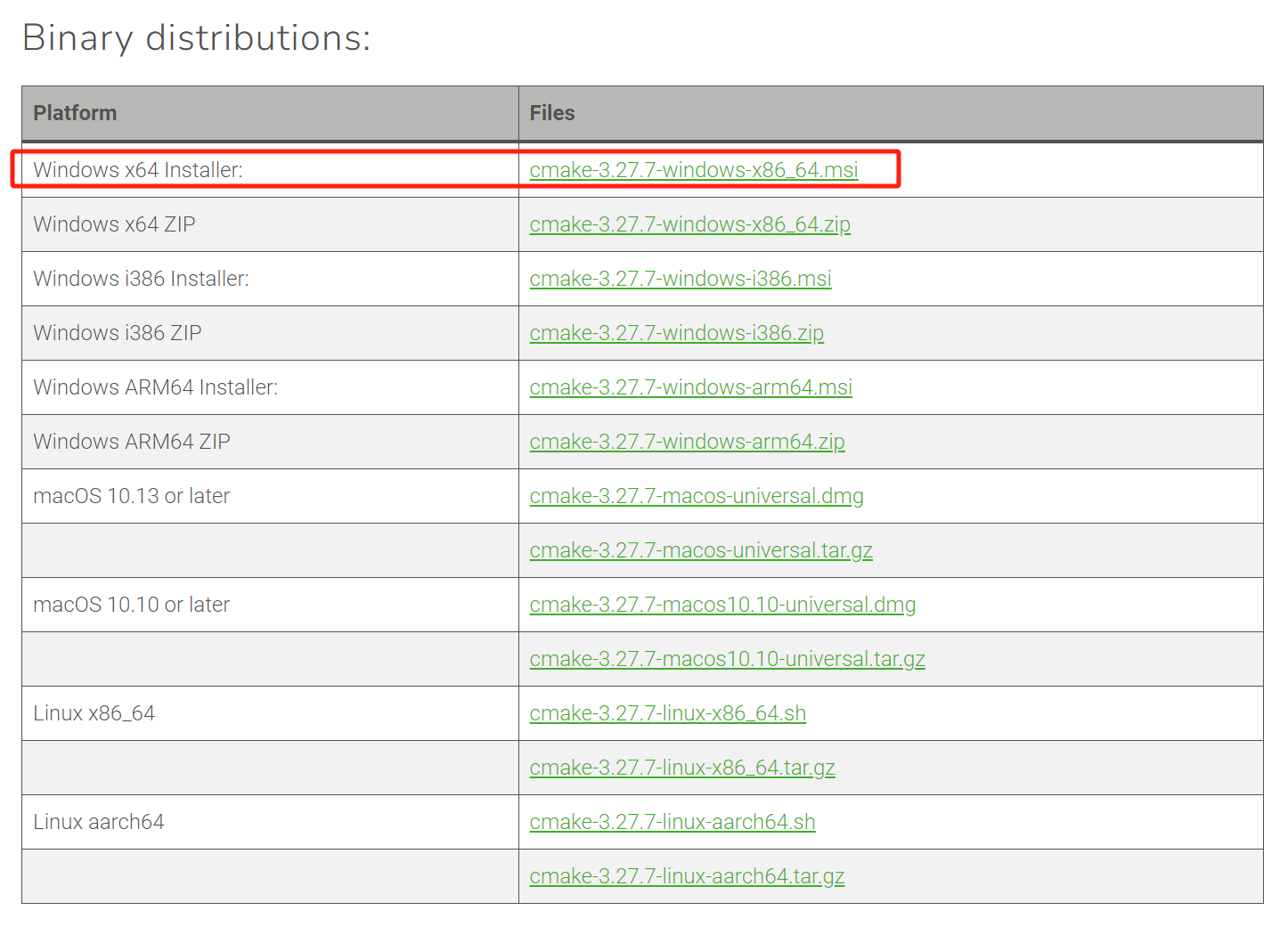
CMake官方下载地址,下载cmake-3.27.7-windows-x86_64.msi。
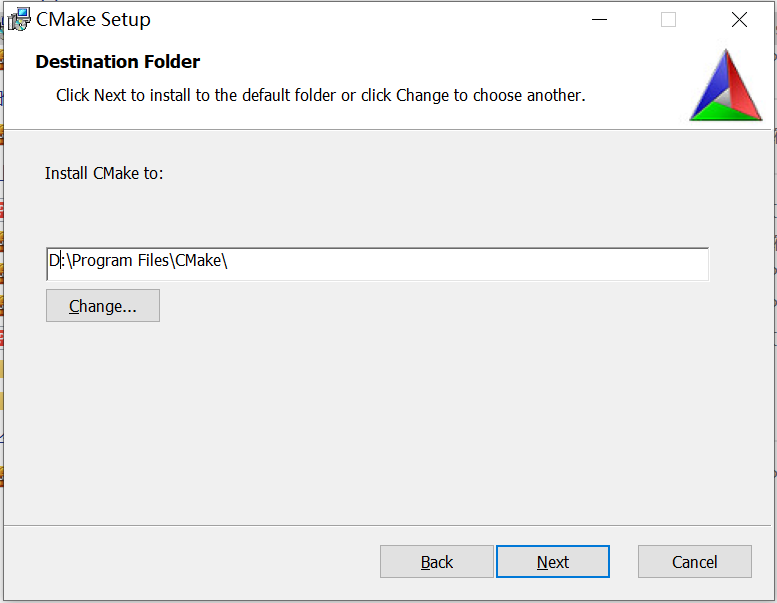
添加到环境和安装路径博主根据自身情况作出了修改,其他都是默认安装。
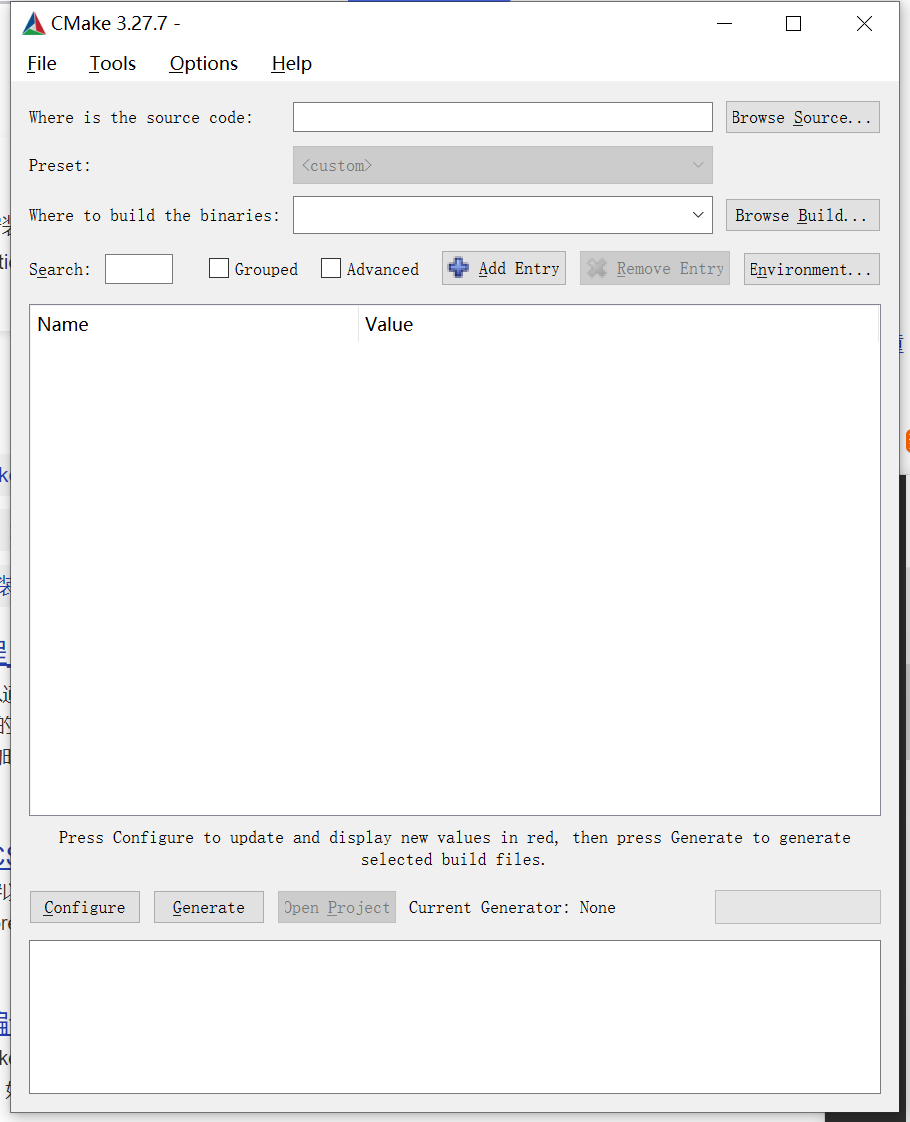
出现以下界面安装成功。
opencv4.8.0
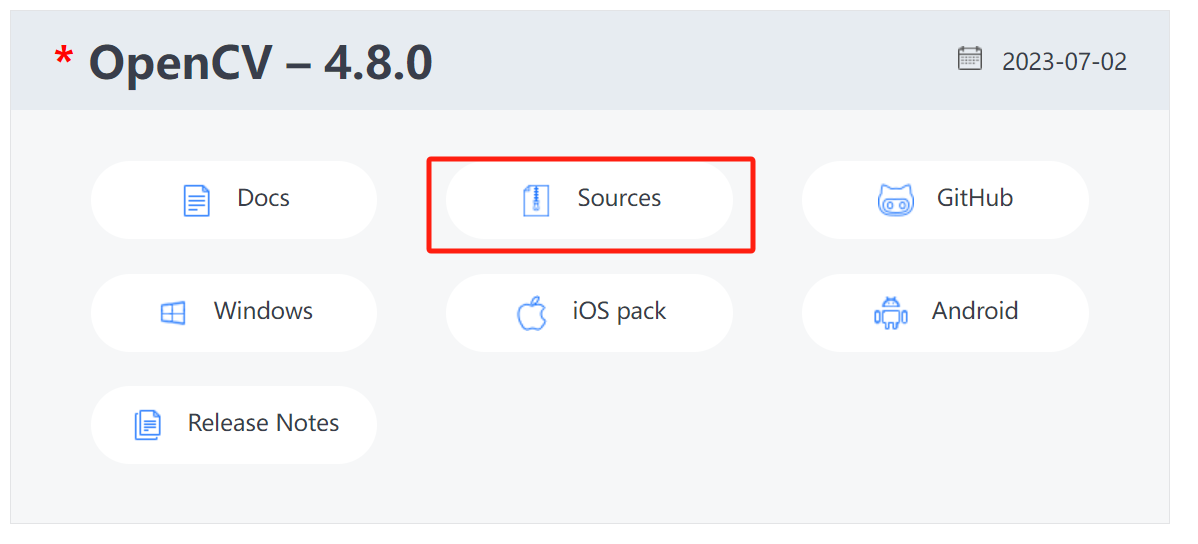
Opencv官方下载地址,下载OpenCV – 4.8.0 Sources,下载解压opencv-4.8.0.zip。
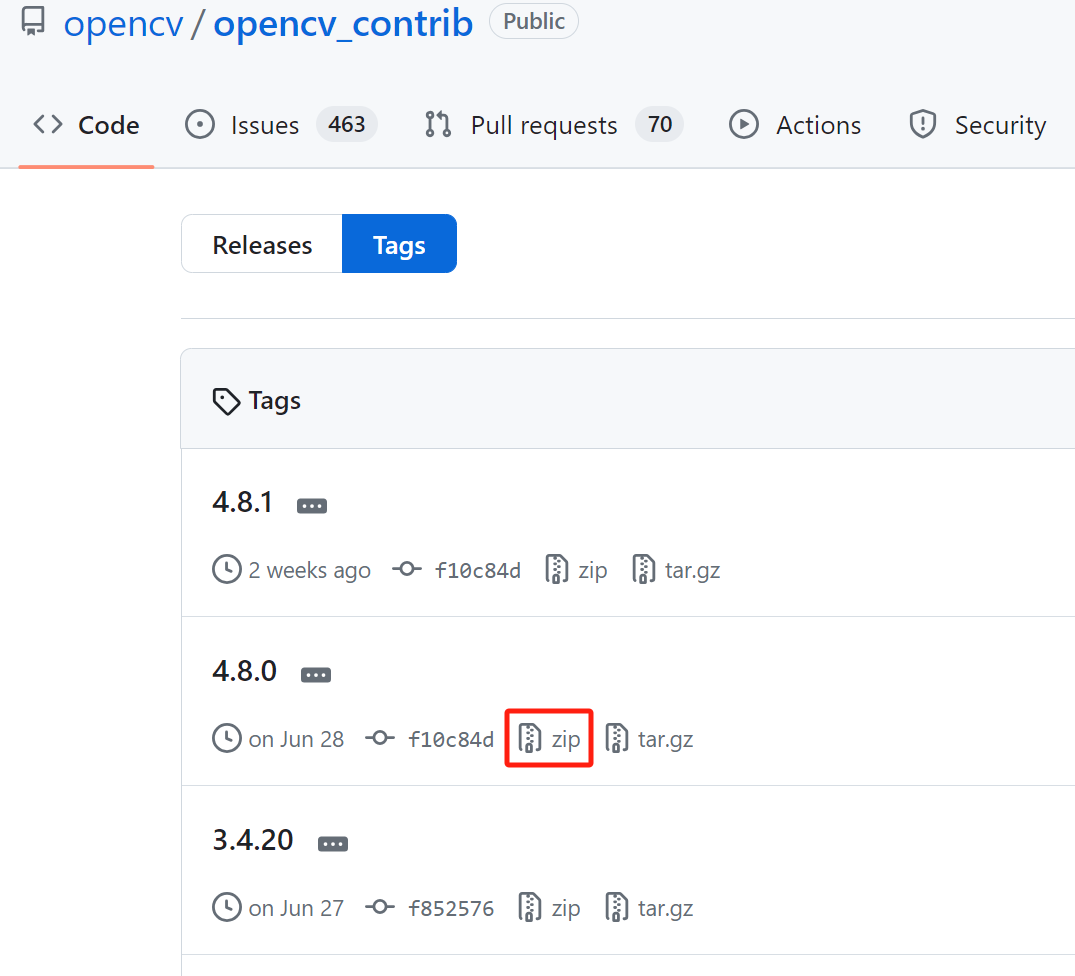
opencv_contrib
opencv_contrib官方下载地址,选择opencv对应的contrib版本,例如opencv4.8.0对应就是opencv_contrib-4.8.0.zip。下载后直接解压。
CMake编译
- 打开CMake,where is the source code是Opencv sources(博主是opencv-4.8.0)的文件夹位置,where to build the binaries是编译opencv保存的文件夹位置(自定义),在左下角第一次点击Configure。
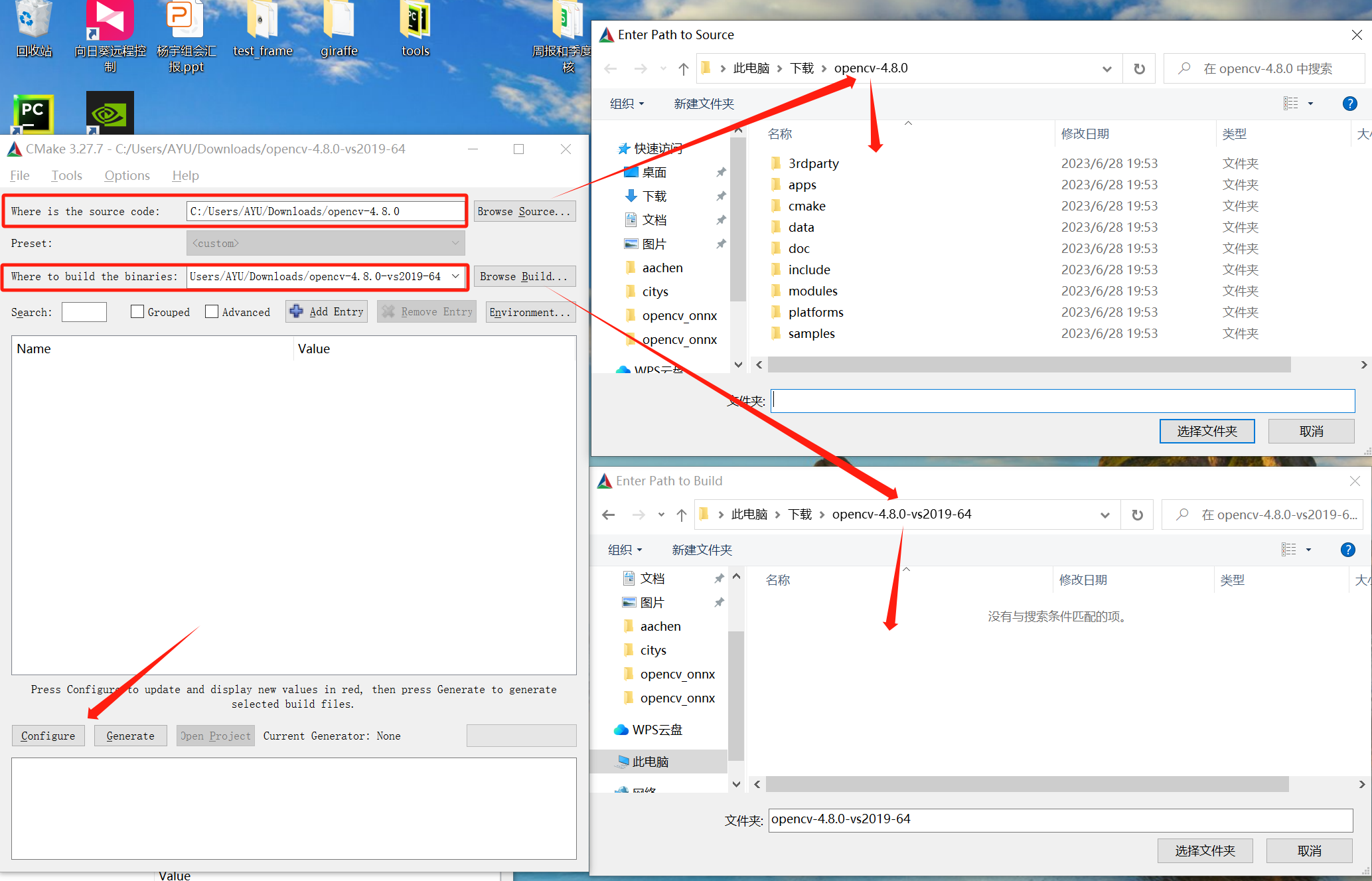
- 选择对应vs的版本(博主是vs2019),系统选择x64,最后点右下角Finish。

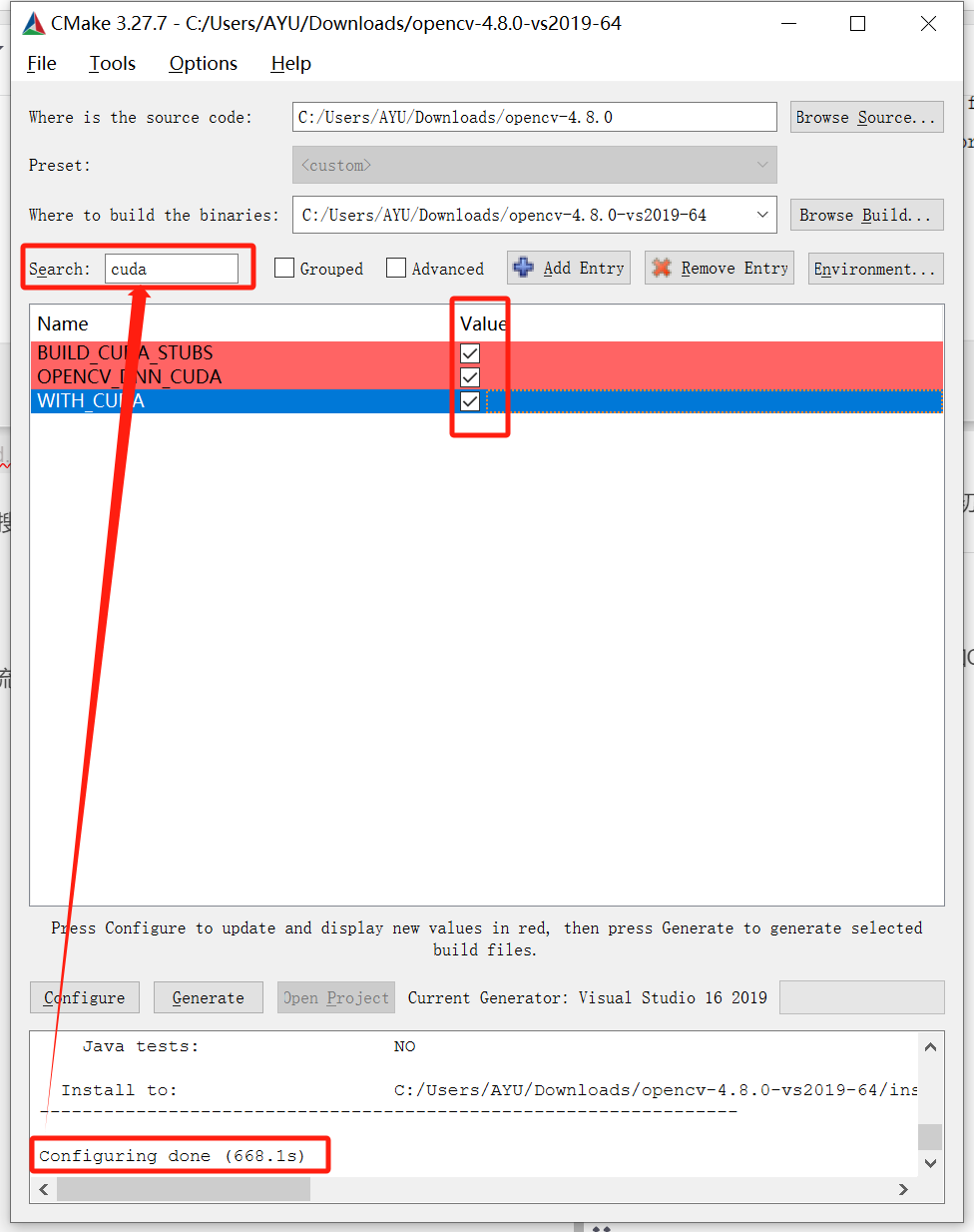
- 显示Configuring done后,在Search搜索框搜索带cuda的关键字,全部勾选。
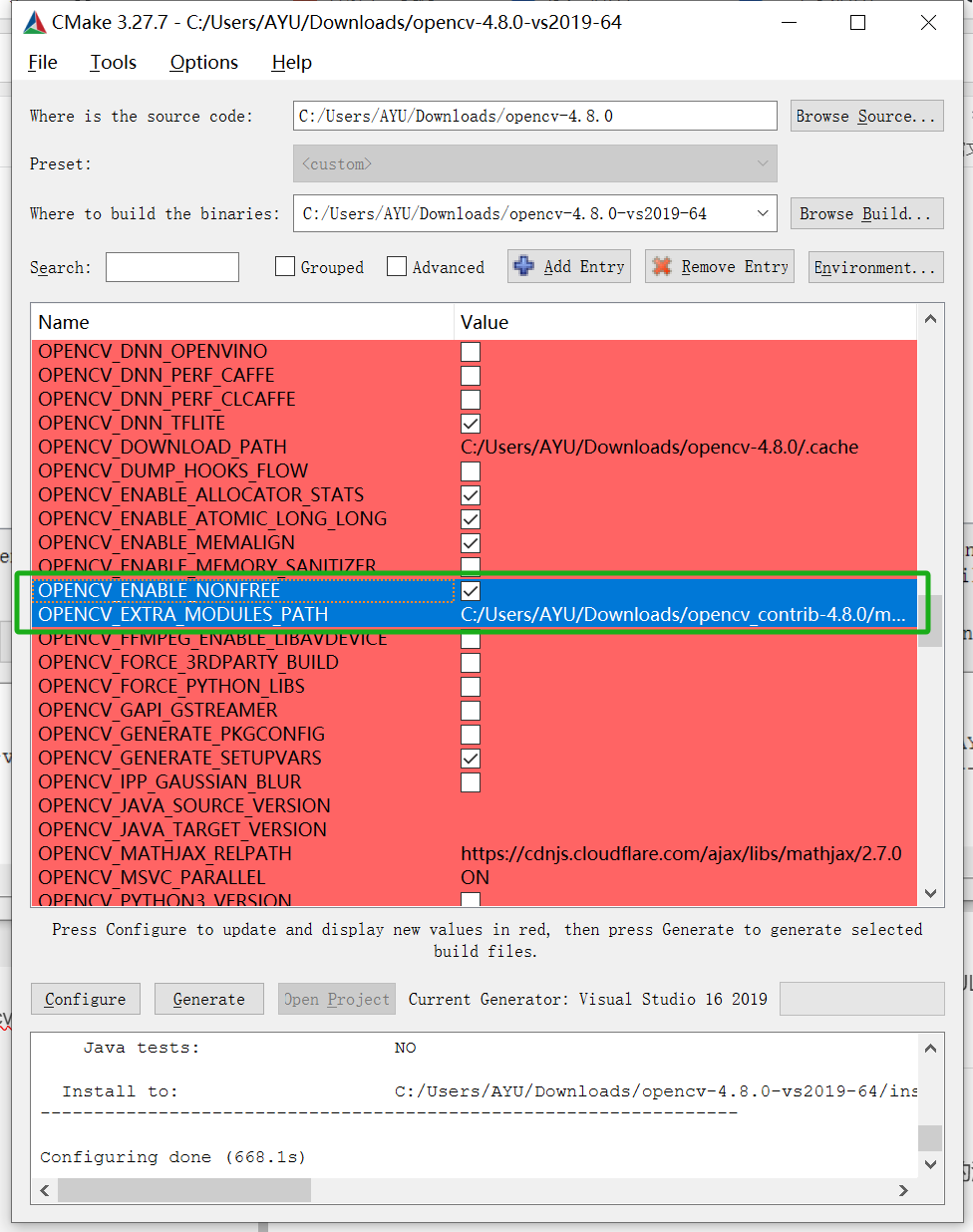
- Search搜索框搜索OPENCV_EXTRA_MODULES_PATH,添加解压的opencv_contrib中的modules的路径,再搜索并勾选OPENCV_ENABLE_NONFREE选项。
- 将build_opencv_world选上,这可以将所有opencv的库都编译在一起,不需要自己手动选择添加每个小模块,但是具体的工程又不建议这种全家桶。

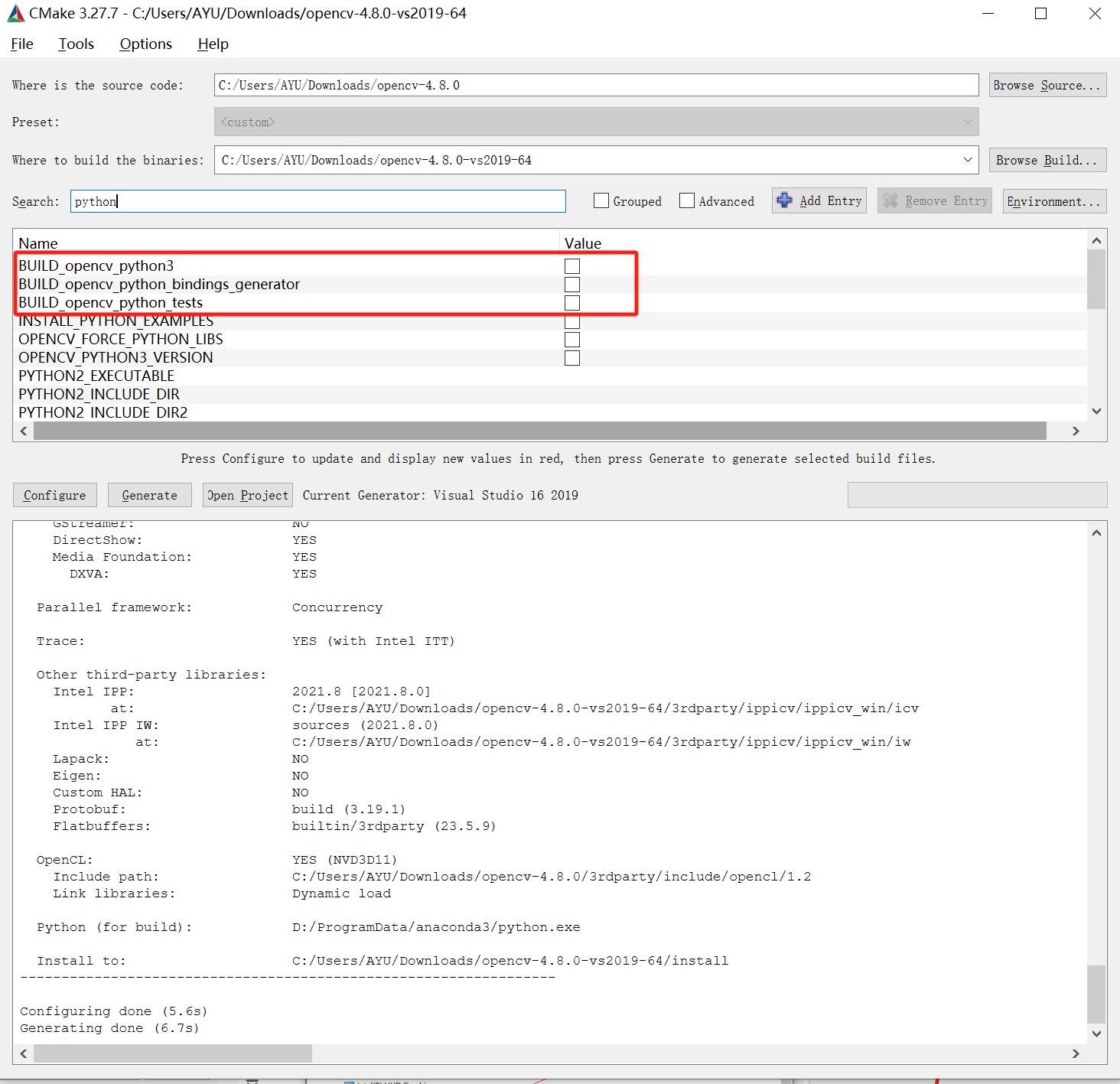
- 对于python、java、js、tests相关选项的选择,用Search搜索框分别搜索“python”,“java”,“js”,“tests”,根据需要选中和取消相关选项,默认都是选中,博主按默认都选上了,第二次点击Configure。
- 显示Configuring done后,将CUDA_ARCH_BIN显卡算力内容改成自己显卡的算力。官网查看显卡算力地址,删除小于自己显卡算力的部分,再搜索并勾选ENABLE_FAST_MATH选项,第三次点击Configure。

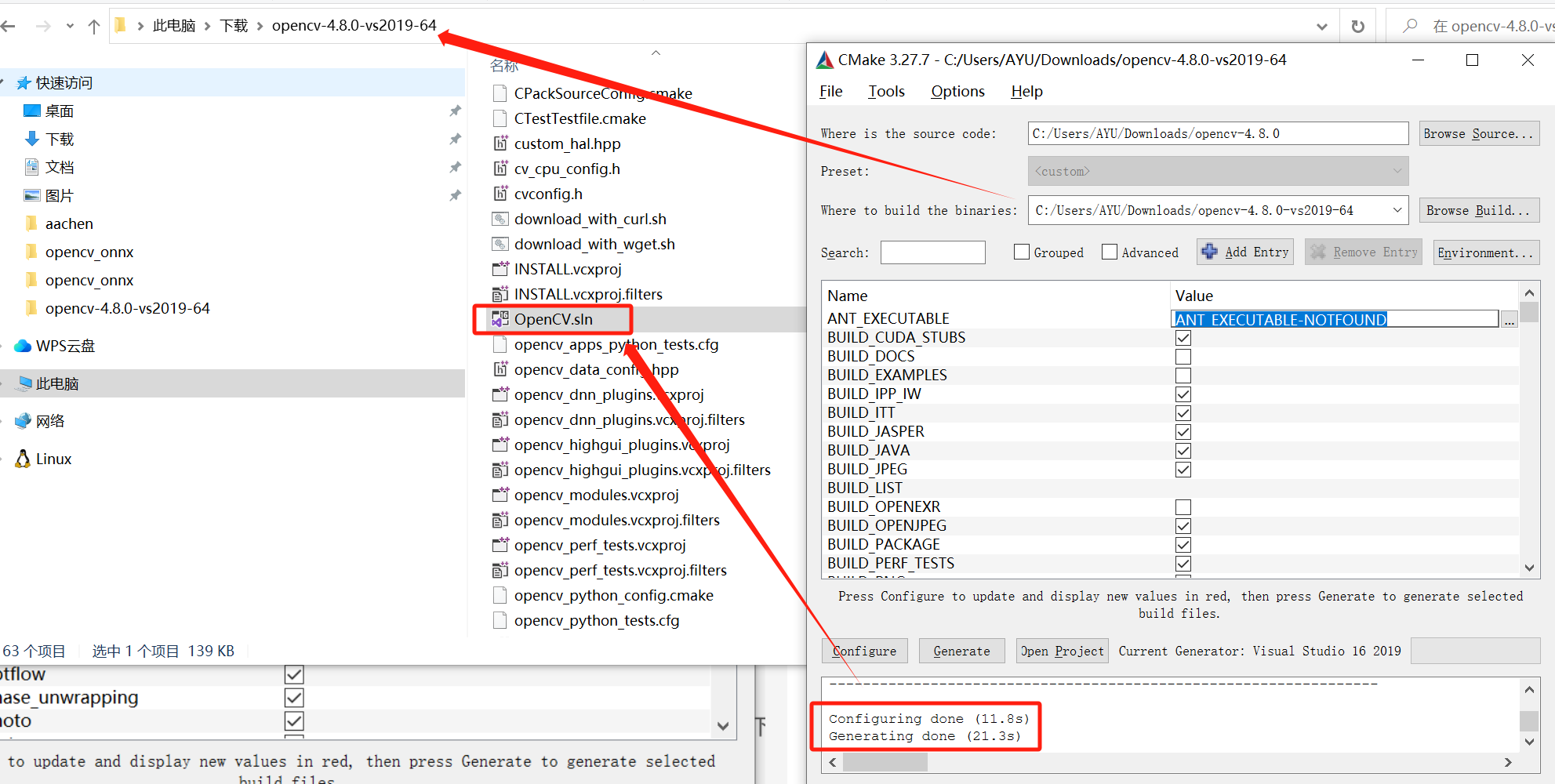
- 显示Configuring done后,点击generate,显示generating done,成功完成cmake编译,在输出的opencv保存文件夹位置中存在就生成了OpenCV.sln文件。
cmake编译过程是会从githup上下载数据,但是一般都会出现下载失败的情况,这里建议读者先跳到【可能出现的问题】这一小节,来确认是不是自己也出现了下载失败的情况。
VS2019编译
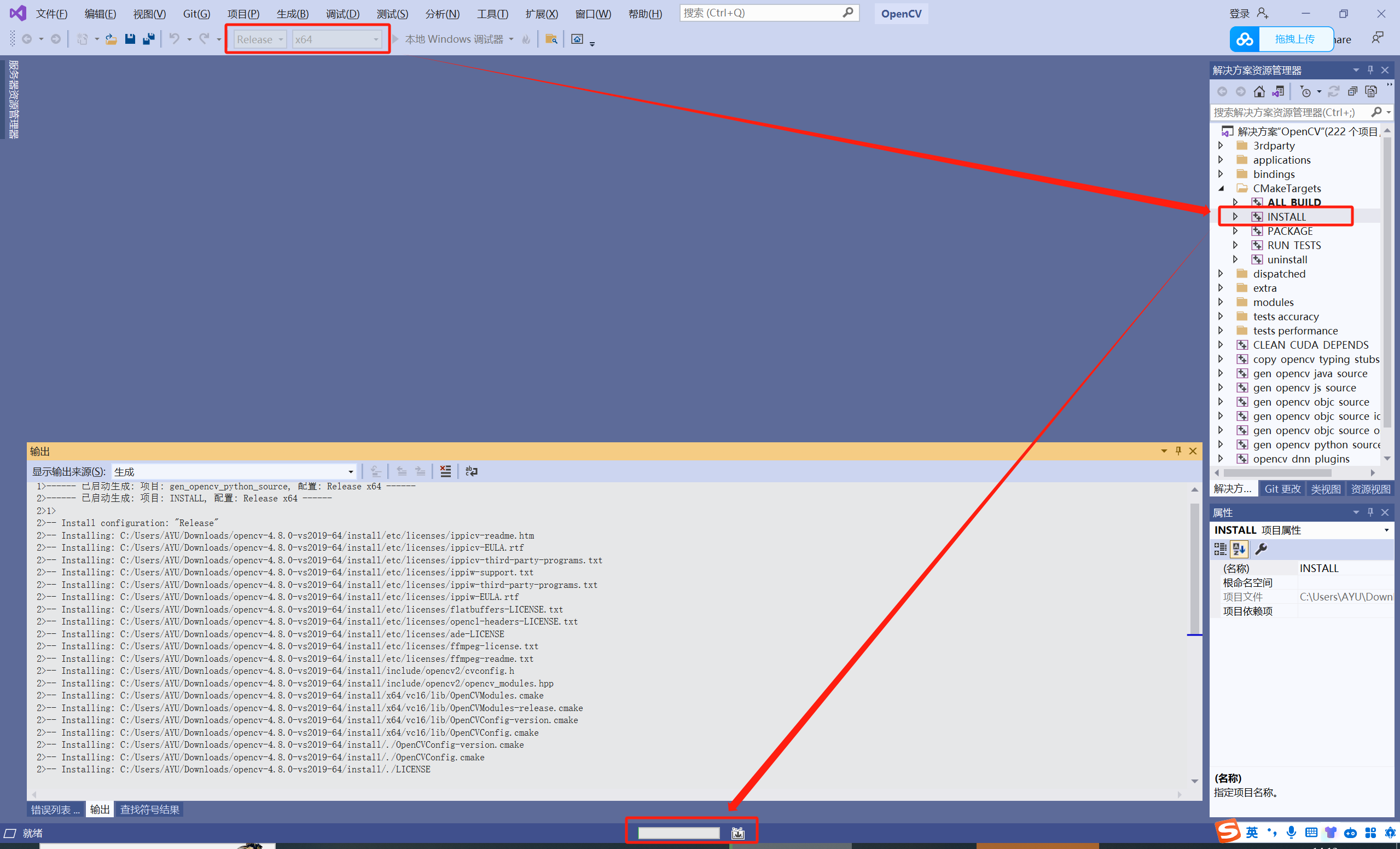
- 使用VS2019 (以管理员方式运行) 打开刚刚编译工程OpenCV.sln,在release|x64模式下,在解决方案资源管理器—>CMakeTargets—>右键点击ALL_BUILD–>生成。

- 同样在release|x64模式下,在解决方案资源管理器—>CMakeTargets—>右键点击INSTALL–>生成。
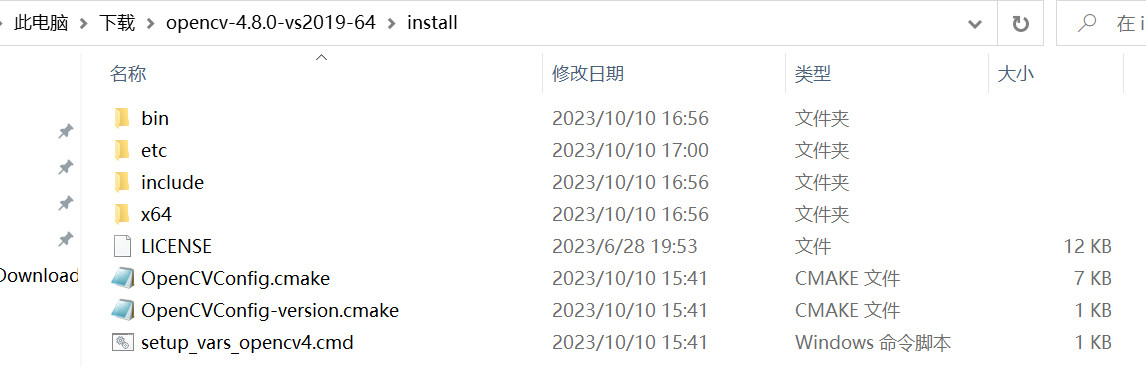
编译完成后在where to build the binaries位置的install文件夹内生成以下内容。
可能出现的问题
cmake编译过程中可能出现的问题
cmake编译出现Download failed的问题。
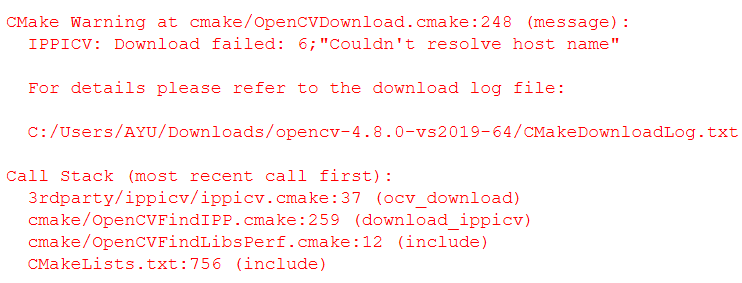
在where to build the binaries位置里面有个CMakeDownloadLog.txt,将里面下载链接复制到浏览器进行下载,

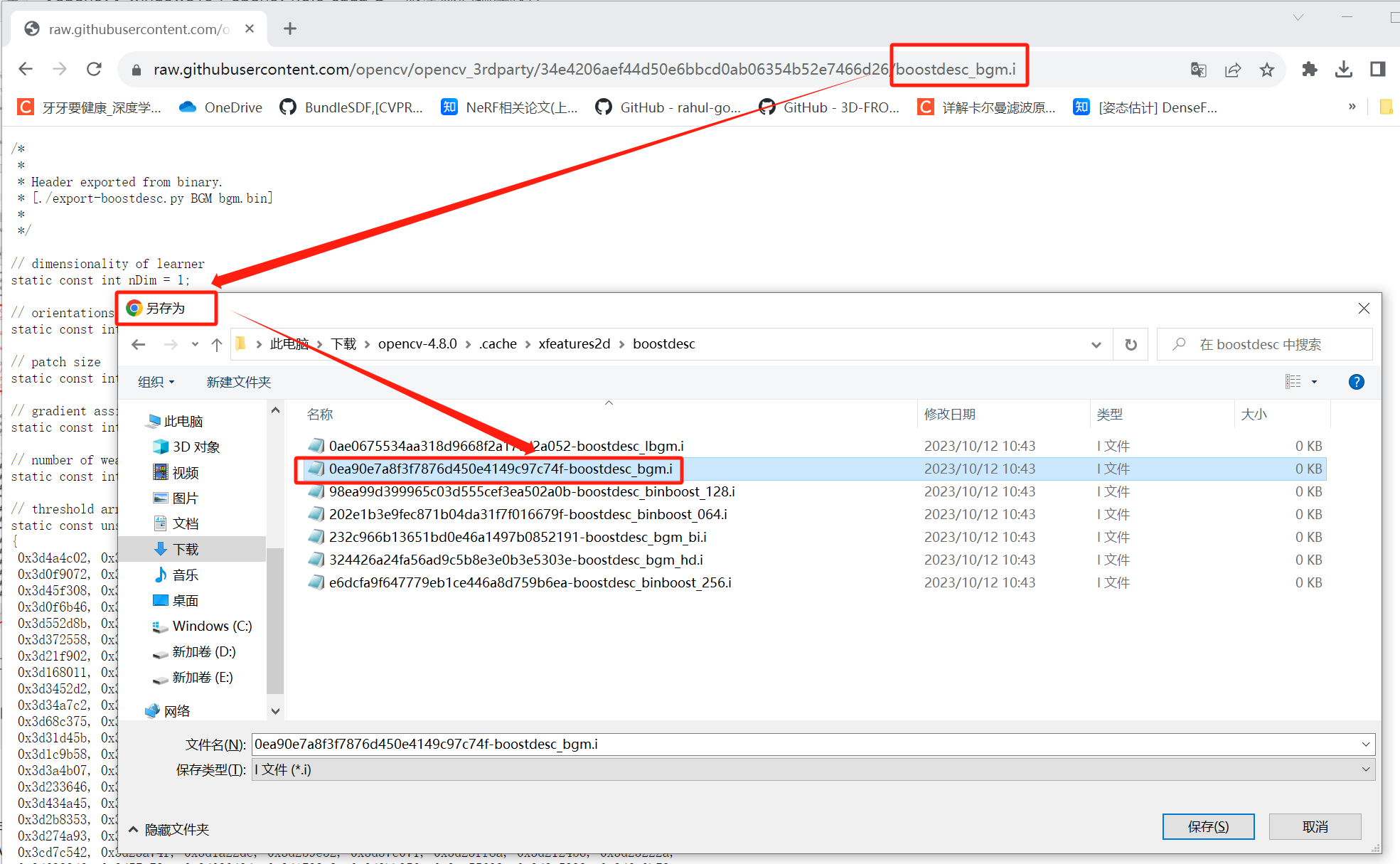
将其和where is the source code里面的.cache文件夹里面内容相对应,下图是下载失败时候,文件大小是0KB,手动下载完成后进行替换。
注意用来替换的文件的名称要与对应空文件的名称保持一致。

对于部分文件则需要将网页以另存为的方式进行替换,注意一定不要以复制网页内容粘贴到空文件的方式进行替换,这是无效的的。
将整个.cache都用同样的方式进行处理。
强调一点,出现这种问题,可以暂时先走完CMake编译过程,因为每一次Configuring都会有新的下载内容,然后再一次性将.cache的内容进行完整的替换,最后进行Configuring和Generate。
VS2019编译过程中可能出现的问题
通常是对于部分资源,vs2019没有管理员操作权限,因此只需要用管理员身份重新打开进行操作即可。

测试使用GPU
这里用一段简单的c++代码验证安装完成的opencv是否支持gpu设备。
#include <opencv2/opencv.hpp>
#include <opencv2/core/cuda.hpp>
int main() {// 检查是否支持CUDAif (cv::cuda::getCudaEnabledDeviceCount()) {std::cout << "检测到支持CUDA的设备数量" << cv::cuda::getCudaEnabledDeviceCount() <<std::endl;}else {std::cout << "未检测到支持CUDA的设备" << std::endl;}return 0;
}
验证成功,oepncv-cuda版本源码编译成功。

总结
尽可能简单、详细的介绍windows10下opencv4.8.0-cuda版本用源码进行编译的详细流程。
相关文章:
【opencv】windows10下opencv4.8.0-cuda C++版本源码编译教程
【opencv】windows10下opencv4.8.0-cuda C版本源码编译教程 提示:博主取舍了很多大佬的博文并亲测有效,分享笔记邀大家共同学习讨论 文章目录 【opencv】windows10下opencv4.8.0-cuda C版本源码编译教程前言准备工具cuda/cudnncmakeopencv4.8.0opencv_contrib CMake编译VS2019编…...
软碟通制作启动盘
一、下载并安装软碟通 二、插入U盘,打开软碟通; 三、在软碟通中选择“文件”-“打开镜像文件”,选择要制作成启动盘的ISO镜像文件; 1.打开要制作的iso文件 选择对应的iso文件 四、在软碟通中选择“启动”-“写入硬盘”ÿ…...

Tomcat和HPPT协议
1.介绍 1.Java EE 规范 JavaEE(java Enterprise Edition):java企业版 JavaEE 规范是很多的java开发技术的总称。这些技术规范都是沿用自J2EE的。一共包括了13个技术规范 2.WEB概述 WEB在计算机领域中代表的是网络 像我们之前所用的WWW&…...
)
Acwing.4736步行者(模拟)
题目 约翰参加了一场步行比赛。 比赛为期 N 天,参赛者共 M 人(包括约翰)。 参赛者编号为 1∼M,其中约翰的编号为 P。 每个参赛者的每日步数都将被赛事方记录并公布。 每日步数最多的参赛者是当日的日冠军(可以有并…...
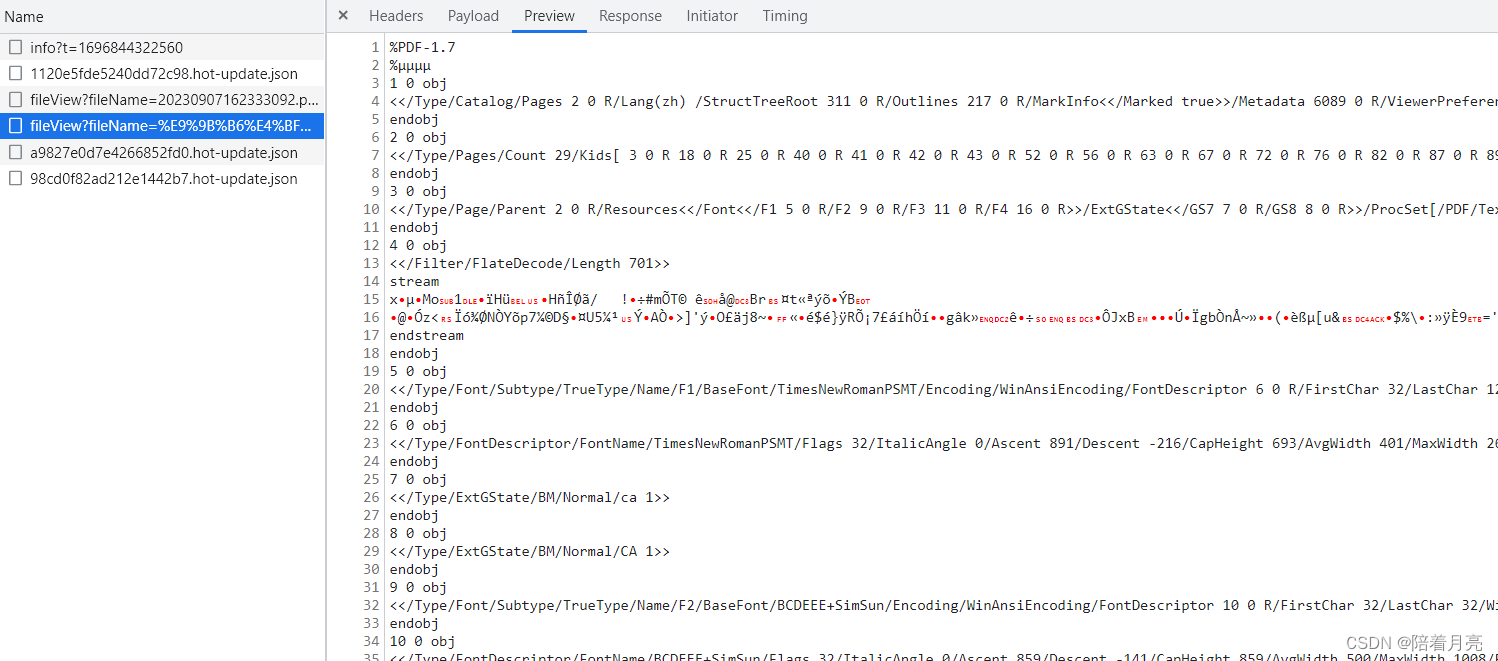
前端预览、下载二进制文件流(png、pdf)
前端请求设置 responseType: “blob” 后台接口返回的文件流如下: 拿到后端返回的文件流后: 预览 <iframe :src"previewUrl" frameborder"0" style"width: 500px; height: 500px;"></iframe>1、预览 v…...
:ESD干扰耦合路径深入分析(一))
搞定ESD(三):ESD干扰耦合路径深入分析(一)
文章目录 一、外部测试环境引发的电场耦合1.1 静电枪枪体的电场耦合1.2 垂直耦合板与水平耦合板的电场耦合二、静电电流泄放路径中的电场耦合2.1 金属平面与敏感信号之间的电场耦合2.2 参考平面与敏感信号布线之间的电场耦合2.3 芯片散热片电场耦合分析2.3.1 散热片静电耦合机理…...
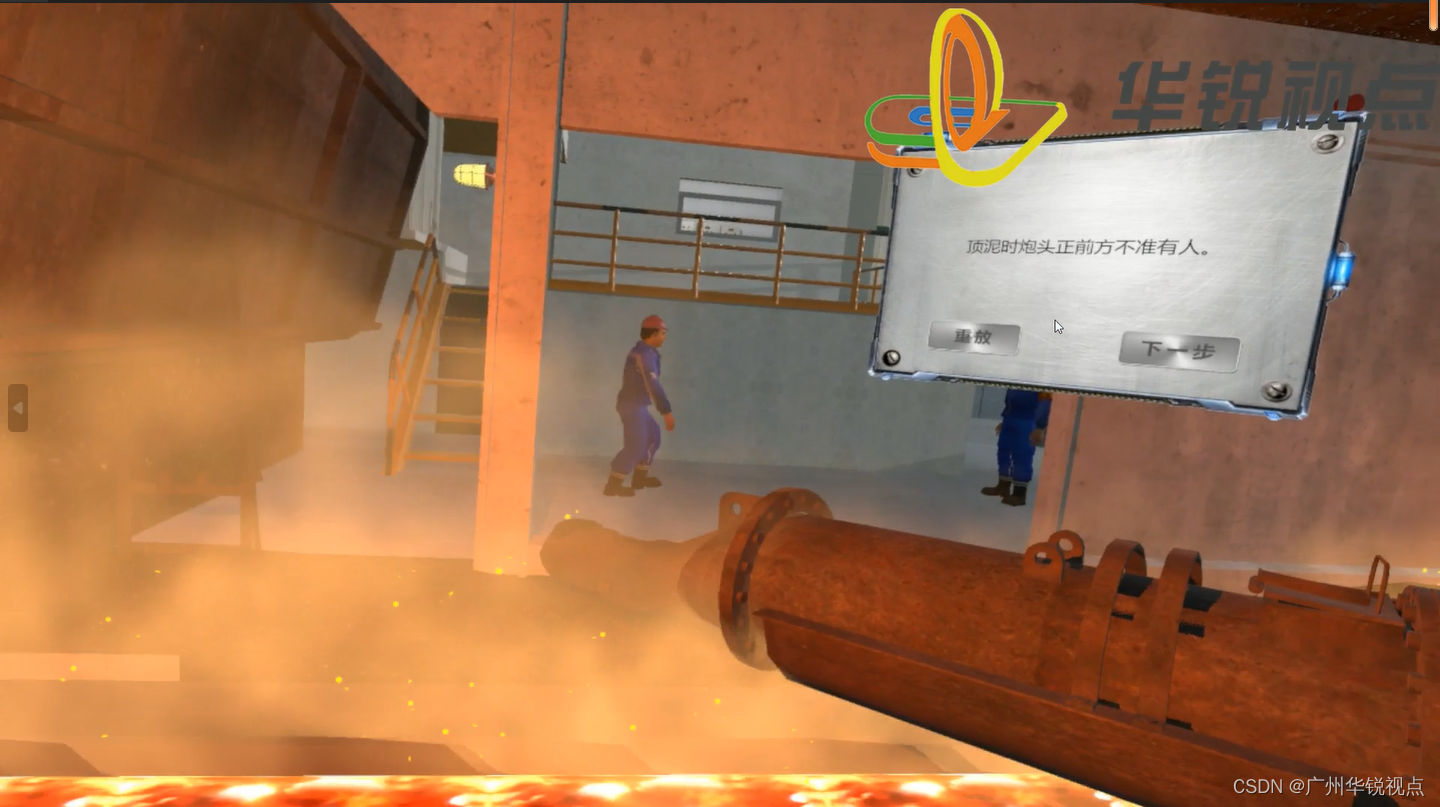
广州华锐互动:炼钢工厂VR仿真实训系统
随着科技的发展,我们的教育体系和职业培训方法也在迅速变化。其中,虚拟现实(VR)技术的出现为我们提供了一种全新的学习和培训方式。特别是在需要高度专业技能和安全性的领域,如钢铁冶炼。本文将探讨如何使用VR进行钢铁…...
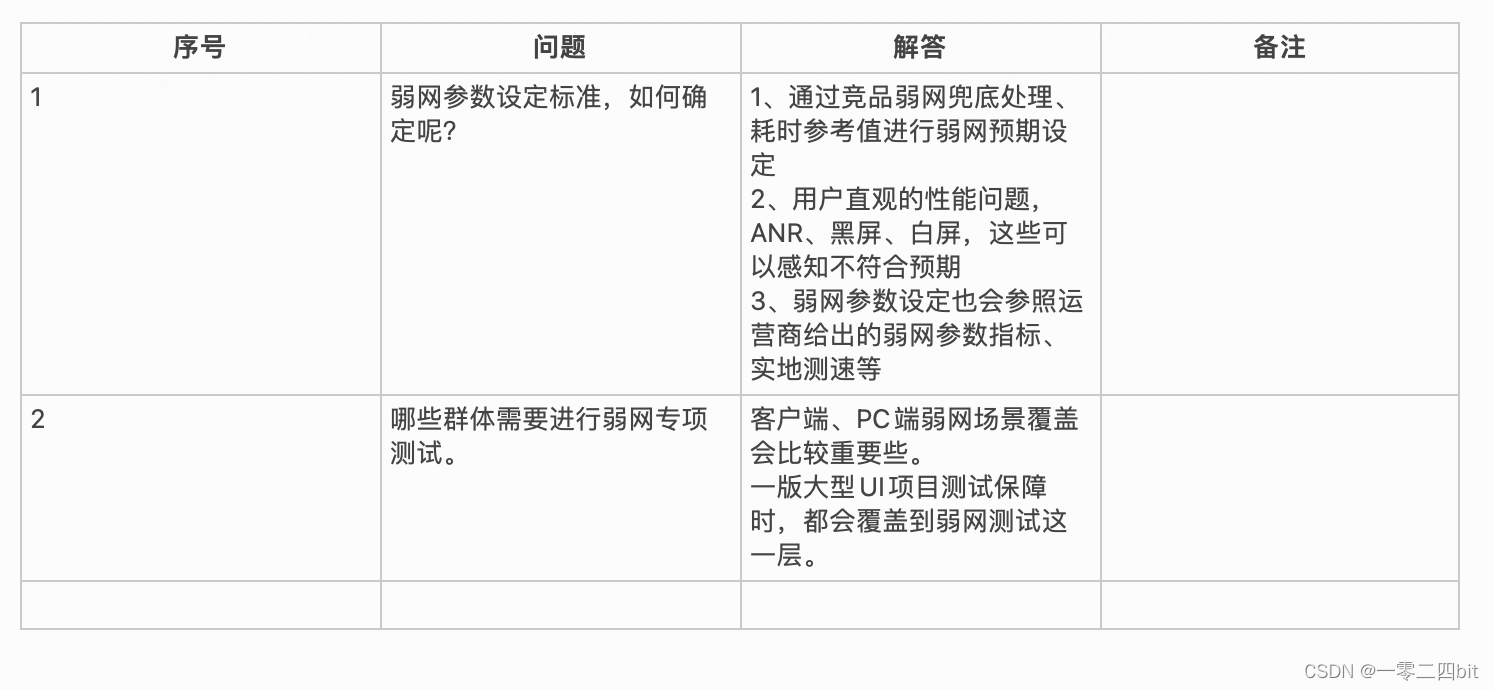
适用于音视频的弱网测试整理
一、什么是弱网环境 对于弱网的定义,不同的应用对弱网的定义是有一定的差别的,不仅要考虑各类型网络最低速率,还要结合业务场景和应用类型去划分。按照移动的特性来说,一般应用低于2G速率的都属于弱网,也可以将3G划分…...
)
【Spring MVC研究】DispatcherServlet如何处理请求(doDispatcher方法)
文章目录 1. 最经典的MVC的使用情况2. 经典情况相关的组件3. 执行3.1. 先看DispatcherServlet的总体过程3.2. 再看RequestMappingHandlerAdapter的总体过程3.2.1. RequestParamMethodArgumentResolver3.2.2. 反射调用 Controller 的方法3.2.3. RequestResponseBodyMethodProces…...
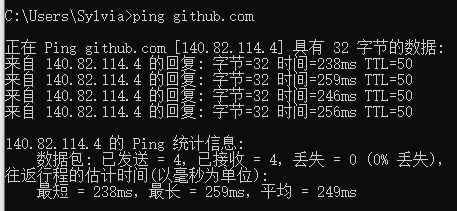
解决github加载过慢问题
github打不开怎么办?看到这篇文章,一切都稳了! DNS被污染,一句话,修改系统hosts文件! 1.hosts文件在哪?C:\Windows\System32\drivers\etc 2.用记事本打开hosts,在最后加入以下两行…...

利用python批量处理nc数据
参考自:用Python批处理指定数据-以WRF输出结果为例演示按照指定维度合并(附示例代码)-腾讯云开发者社区-腾讯云 #下面将分别展示选择单个变量进行合并以及将所有变量按照指定维度进行合并。 #1.以单个变量P为例,可以根据需求更改,按照时间顺…...
 获取 ping 命令结果解析)
popen() 获取 ping 命令结果解析
ref: Linux:popen() 获取 ping 命令结果 用C/C代码检测ip能否ping通(配合awk和system可以做到批量检测)_c 验证网卡能拼同-CSDN博客 Android中调用Ping操作及结果分析 - 简书 2. Linux使用ping命令查看网络延迟 - 简书...

【pytorch】深度学习准备:基本配置
深度学习中常用包 import os import numpy as np import torch import torch.nn as nn from torch.utils.data import Dataset, DataLoader import torch.optim as optimizer超参数设置 2种设置方式:将超参数直接设置在训练的代码中;用yaml、json&…...

etcd随笔
大集群 大集群主要问题有 btree重平衡和分解过程中超过20Gi的性能瓶颈,是O(n)复杂度,启动耗时增大,放大expensive request的影响。 其中最重要的就是最大程度地减少 expensive request。 对几十万级别的对象数量来说…...
0基础学习VR全景平台篇 第107篇:全景图调色和细节处理(上,地拍)
上课!全体起立~ 大家好,欢迎观看蛙色官方系列全景摄影课程! 今天教给大家的课程是地拍全景图调色和细节处理,下面我们就开始吧! 1.把照片快速导入LR软件 选择【图库】模块 打开软件后,点击【导入】按…...

Verilog功能模块——同步FIFO
前言 FIFO功能模块分两篇文章,本篇为同步FIFO,另一篇为异步FIFO,传送门: Verilog功能模块——异步FIFO-CSDN博客 同步FIFO实现起来是异步FIFO的简化版,所以,本博文不再介绍FIFO实现原理,感兴趣…...

Unity ToLua热更框架使用教程(1)
从本篇开始将为大家讲解ToLua在unity当中的使用教程。 Tolua的框架叫LuaFramework,首先附上下载链接: https://github.com/jarjin/LuaFramework_UGUI_V2 这个地址的是UGUI的。 下载完之后导入项目,首先,我们要先让这个项目跑起…...

车载相关名词--车载数据中心方案
车载数据中心方案 参考链接:https://zhuanlan.zhihu.com/p/600031042?utm_id=0 下面这张图是小鹏汽车嵌入式系统高级专家 唐黾 在同ARM一起的一个演讲稿中发布的,是一张未来车载数据中心单芯片方案构想图。主要针对的是智驾域和座舱域融合方案,下面对如上图的内外部组件及…...

helm使用
前言 类似于 Linux 的 YUM、APT,Helm 是 K8S 的包管理工具。 Helm, 一个二进制工具,用来安装、升级、卸载 K8S 中的应用程序。 Helm Chart,一个 tgz 包,类似安卓的 APK。 K8S 应用打包成 Chart,通过 He…...

Python in Visual Studio Code 2023年10月发布
排版:Alan Wang 我们很高兴地宣布 Visual Studio Code 的 Python 和 Jupyter 扩展于 2023 年 10 月发布! 此版本包括以下公告: Python 调试器扩展更新弃用 Python 3.7 支持Pylint 扩展更换时的 Lint 选项Mypy 扩展报告的范围和守护程序模式G…...

关联查询,左连接,inner join笔记,BNL,NLJ
文章目录left join的最大值和最小值3个表的inner join关联查询时的is_del处理cross join(full join)NLJ 性能高BNL 性能低blj会导致什么问题?left join的最大值和最小值 假设左表m条,右表n条 最小值是m: 当一条也匹配不到右表时,或者右表中…...

YetiForceCRM社区与支持:如何获得帮助并参与开源贡献
YetiForceCRM社区与支持:如何获得帮助并参与开源贡献 【免费下载链接】YetiForceCRM Weve moved! For more information, visit https://github.com/YetiForceCompany/YetiForce 项目地址: https://gitcode.com/gh_mirrors/ye/YetiForceCRM YetiForceCRM是一…...

使用taotoken聚合api后c语言项目调用大模型的延迟与稳定性体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用taotoken聚合api后c语言项目调用大模型的延迟与稳定性体验 在开发基于C语言的服务器后台时,集成大模型能力常面临一…...

构建智能交易系统:高效掌握缠论量化实战技巧
构建智能交易系统:高效掌握缠论量化实战技巧 【免费下载链接】chan.py 开放式的缠论python实现框架,支持形态学/动力学买卖点分析计算,多级别K线联立,区间套策略,可视化绘图,多种数据接入,策略开…...
)
告别闪烁!用STM32CubeMX快速配置PWM+DMA驱动WS2812彩灯(F4系列实测)
告别闪烁!用STM32CubeMX快速配置PWMDMA驱动WS2812彩灯(F4系列实测) 在嵌入式开发中,驱动WS2812彩灯往往需要精确的时序控制,传统软件延时方式不仅占用CPU资源,还容易因中断干扰导致灯光闪烁。本文将展示如何…...

2026年阿里云OpenClaw/Hermes Agent配置Token Plan新手友好流程
2026年阿里云OpenClaw/Hermes Agent配置Token Plan新手友好流程。OpenClaw是开源的个人AI助手,Hermes Agent则是一个能自我进化的AI智能体框架。阿里云提供计算巢、轻量服务器及无影云电脑三种部署OpenClaw 与 Hermes Agent的方案、百炼Token Plan兼容主流 AI 工具&…...

基于智能体的企业级自主决策与业务运营平台解决方案:AI智能管理驾驶舱、智能管理驾驶舱的四大功能定位、总体方案蓝图、总体规划方案
该方案提出以AI大模型与智能体为核心的“智能管理驾驶舱”,通过整合企业私有数据及业务系统,实现从信息呈现、自主决策到自动执行的业务闭环。平台支持事件驱动、可视化编排与多智能体调度,覆盖生产、供应链等典型场景,旨在降低运…...

硬件知识 allegro16.6 3D 模型导入与其问题笔记
1. 嘉立创获取3D 模型(注意:网页版不行,需要现在专业版) 2. freecad 去去除 PCB 的封装。(这个过程可能额会导致 出现一个文件里面有两个相同的元器件,需要删掉一个,自己检查) 3. …...
)
别再硬编码了!ABAP Text Elements 三分钟搞定报表字段中文显示(附图标添加技巧)
ABAP文本元素实战:告别硬编码的报表开发艺术 每次看到报表界面上那些冷冰冰的字段名——MATNR、WERKS、VBELN——你是不是也感到一丝尴尬?业务用户可不懂这些技术缩写,他们需要的是直观的"物料编号"、"工厂"和"销售…...

Mac/Win双平台保姆级教程:从零配置ADB环境到连接真机/模拟器
Mac/Win双平台保姆级教程:从零配置ADB环境到连接真机/模拟器 第一次接触Android开发或测试时,配置ADB环境往往是让人头疼的第一步。不同操作系统、不同设备品牌、不同模拟器之间的差异,让很多新手在"adb devices"命令前败下阵来。…...