卡尔曼滤波原理及代码实战
目录
- 简介
- 1.原理介绍
- 场景假设
- (1).下一时刻的状态
- (2).增加系统的内部控制
- (3).考虑运动系统外部的影响
- (4).后验估计:预测结果与观测结果的融合
- 卡尔曼增益K
- 2.卡尔曼滤波计算过程
- (1).预测阶段(先验估计阶段)
- (2).更新阶段(后验估计阶段)
- 3.代码举例
简介
我们可以将卡尔曼滤波看做一种运动模型,它可以在任何含有不确定信息的动态系统中,对系统的下一步走向做出一定的预测,无论是在单目标还是多目标领域都是很常用的一种算法。它最大的优点就是采用递归的方式来解决线性滤波的问题,只需要当前的观测值和前一个周期的预测值就能够进行状态估计。
1.原理介绍
场景假设
假设有一个小车在路上行驶,小车的初始位置和速度用一个状态向量表示:
x^t=[position,velocity]简写为x^t=[pt,vt]\hat x_t=[position,velocity]\\ 简写为\\ \hat x_t=[p_t,v_t] x^t=[position,velocity]简写为x^t=[pt,vt]
因为用两个变量表示了状态向量,所以系统中这两个变量的不确定性和相关性可以用一个协方差矩阵来表示:
Pt=[∑pp∑pv∑vp∑vv]P_t=\begin{bmatrix} \sum_{pp}\quad\sum_{pv}\\ \sum_{vp}\quad\sum_{vv} \end{bmatrix} Pt=[∑pp∑pv∑vp∑vv]
比如前一时刻的速度Vt−1V_{t-1}Vt−1和下一时刻的速度VtV_tVt存在着某种关联,不可能从0突变成光速;
比如前一时刻的速度Pt−1P_{t-1}Pt−1和下一时刻的速度PtP_tPt也存在着某种关联,不可能从我国某地突然变成火星某地。
(1).下一时刻的状态
当小车在做匀速运动时,小车下一时刻的位置和速度如下:
{pt=pt−1+vt−1Δtvt=vt−1\begin{cases} p_t=p_{t-1}+v_{t-1}\Delta t\\ v_t=v_{t-1} \end{cases} {pt=pt−1+vt−1Δtvt=vt−1
矩阵形式为:
[ptvt]=[1Δt01][pt−1vt−1]=Ft[pt−1vt−1]\begin{bmatrix} p_t\\ v_{t} \end{bmatrix}= \begin{bmatrix} 1\quad\Delta t\\ 0\quad1 \end{bmatrix} \begin{bmatrix} p_{t-1}\\ v_{t-1} \end{bmatrix}=F_t\begin{bmatrix} p_{t-1}\\ v_{t-1} \end{bmatrix}[ptvt]=[1Δt01][pt−1vt−1]=Ft[pt−1vt−1]
即:x^t=[1Δt01]x^t−1=Ftx^t−1\hat x_t=\begin{bmatrix} 1\quad\Delta t\\ 0\quad1 \end{bmatrix}\hat x_{t-1}=F_t\hat x_{t-1} x^t=[1Δt01]x^t−1=Ftx^t−1
记状态转移矩阵为,表示小车状态随时间的变化:
Ft=[1Δt01]F_t=\begin{bmatrix}1\quad\Delta t\\0\quad1\end{bmatrix} Ft=[1Δt01]
系统的不确定性和相关性用PtP_tPt表示,而下一时刻的协方差矩阵可表示为(T表示矩阵的转置):
Pt=FtPt−1FtTP_t=F_tP_{t-1}F^T_t Pt=FtPt−1FtT
(2).增加系统的内部控制
如果对小车进行控制,比如加速和减速,假设它的加速度为ata_tat,则小车下一时刻的位置和速度是:
{pt=pt−1+vt−1Δt+12atΔt2vt=vt−1+atΔt\begin{cases} p_t=p_{t-1}+v_{t-1}\Delta t+\frac{1}{2}a_t\Delta t^2\\ v_t=v_{t-1}+a_t\Delta t \end{cases} {pt=pt−1+vt−1Δt+21atΔt2vt=vt−1+atΔt
矩阵形式为:
[ptvt]=[1Δt01][pt−1vt−1]+[Δt22Δt]at=Ft[pt−1vt−1]+Btut\begin{bmatrix} p_t\\ v_{t} \end{bmatrix}= \begin{bmatrix} 1\quad\Delta t\\ 0\quad1 \end{bmatrix} \begin{bmatrix} p_{t-1}\\ v_{t-1}\end{bmatrix}+\begin{bmatrix}\frac{\Delta t^2}{2}\\\Delta t\end{bmatrix}a_t= F_t\begin{bmatrix} p_{t-1}\\ v_{t-1} \end{bmatrix}+B_t u_t [ptvt]=[1Δt01][pt−1vt−1]+[2Δt2Δt]at=Ft[pt−1vt−1]+Btut
记状态控制矩阵为Bt=[Δt22Δt]B_t=\begin{bmatrix} \frac{\Delta t^2}{2}\\ \Delta t \end{bmatrix}Bt=[2Δt2Δt],表明加速度如何改变小车的状态;
记状态控制向量为 utu_tut,表明控制的力度大小和方向。
(3).考虑运动系统外部的影响
小车运动时有很多因素可以对它的位置速度造成影响,比如风俗,路况等,假设外部对小车造成的系统状态误差为wtw_twt,并且它服从高斯分布wtN(0,Qt)w_t~N(0,Q_t)wt N(0,Qt),代入之前的小车运行控制方程,可以得到最终完整的状态预测方程:
x^t=Ftx^t−1+Btut+wtPt=FtPt−1FtT+Qt\hat x_t=F_t\hat x_{t-1}+B_tu_t+w_t\\ P_t=F_tP_{t-1}F^T_t+Q_t x^t=Ftx^t−1+Btut+wtPt=FtPt−1FtT+Qt
除了小车运动的场景,其他物体的状态变化
一般情况下,假设wtw_twt为0即可,将上述公式规范化得到:
x=Fx+BuP=FPFT+Qx=Fx+Bu\\ P=FPF^T+Q x=Fx+BuP=FPFT+Q
(4).后验估计:预测结果与观测结果的融合
在等3步中我们预测出了小车的下一时刻的运动状态,将它的结果称为预测结果,也称为先验估计;不过实际中,汽车上会有里程表、GPS等设备也会提供小车下一时刻的运动状态,称其结果为观测结果。
在实际情况中,预测结果和观测结果都有一定的误差,它们的结果都不一定十分准确,而卡尔曼滤波最重要的作用就是将两者融合,充分利用两者的不确定性得到更加准确的结果,称之为后验估计。
卡尔曼增益K
融合阶段需要用到一个关键的系数卡尔曼增益K,其公式如下(推导过程略):
K=PHT(HPHT)+RK=\frac{PH^T}{(HPH^T)+R} K=(HPHT)+RPHT
P表示变量的不确定性和相关性的协方差矩阵;
R表示传感器观测结果的噪声的协方差矩阵,因为观测值的结果也不一定完美;
H表示预测值和观测值之间的某种关系矩阵,因为它们的结果存在的一定交合;
整体来说,卡尔曼增益表示对观测结果借鉴的程度,相当于一个权重项,让算法知道怎么利用观测与预测进行估计,目的就是让最优估计值的方差更小,是卡尔曼滤波的核心。
2.卡尔曼滤波计算过程
卡尔曼滤波的计算一般分为两步:预测阶段和更新阶段。
(1).预测阶段(先验估计阶段)
x=Fx+BuP=FPFT+Qx=Fx+Bu\\ P=FPF^T+Q x=Fx+BuP=FPFT+Q
(2).更新阶段(后验估计阶段)
K=PHT((HPHT)+R)−1x=x+(K(z−(Hx)))P=(I−(KH))PK=PH^T((HPH^T)+R)^{-1}\\ x=x+(K(z-(Hx)))\\ P=(I-(KH))P K=PHT((HPHT)+R)−1x=x+(K(z−(Hx)))P=(I−(KH))P
x表示系统状态;
z表示传感器的观测结果;
F表示状态转移矩阵;
B表示状态控制矩阵;
u表示状态控制向量;
H表示预测和观测的关系矩阵;
P表示变量的不确定性和相关性的协方差矩阵;
R表示传感器观测结果的噪声的协方差矩阵;
Q表示不确定因素对系统预测结果造成误差的协方差矩阵。
Q和R根据实际情况来定,不断调优根据效果选择一个最优解;
在实际计算中,我们需要关注的是系统的状态x,和它的误差协方差矩阵P,卡尔曼增益K。
3.代码举例
相关文章:

卡尔曼滤波原理及代码实战
目录简介1.原理介绍场景假设(1).下一时刻的状态(2).增加系统的内部控制(3).考虑运动系统外部的影响(4).后验估计:预测结果与观测结果的融合卡尔曼增益K2.卡尔曼滤波计算过程(1).预测阶段(先验估计阶段)(2).更新阶段(后验估计阶段&…...
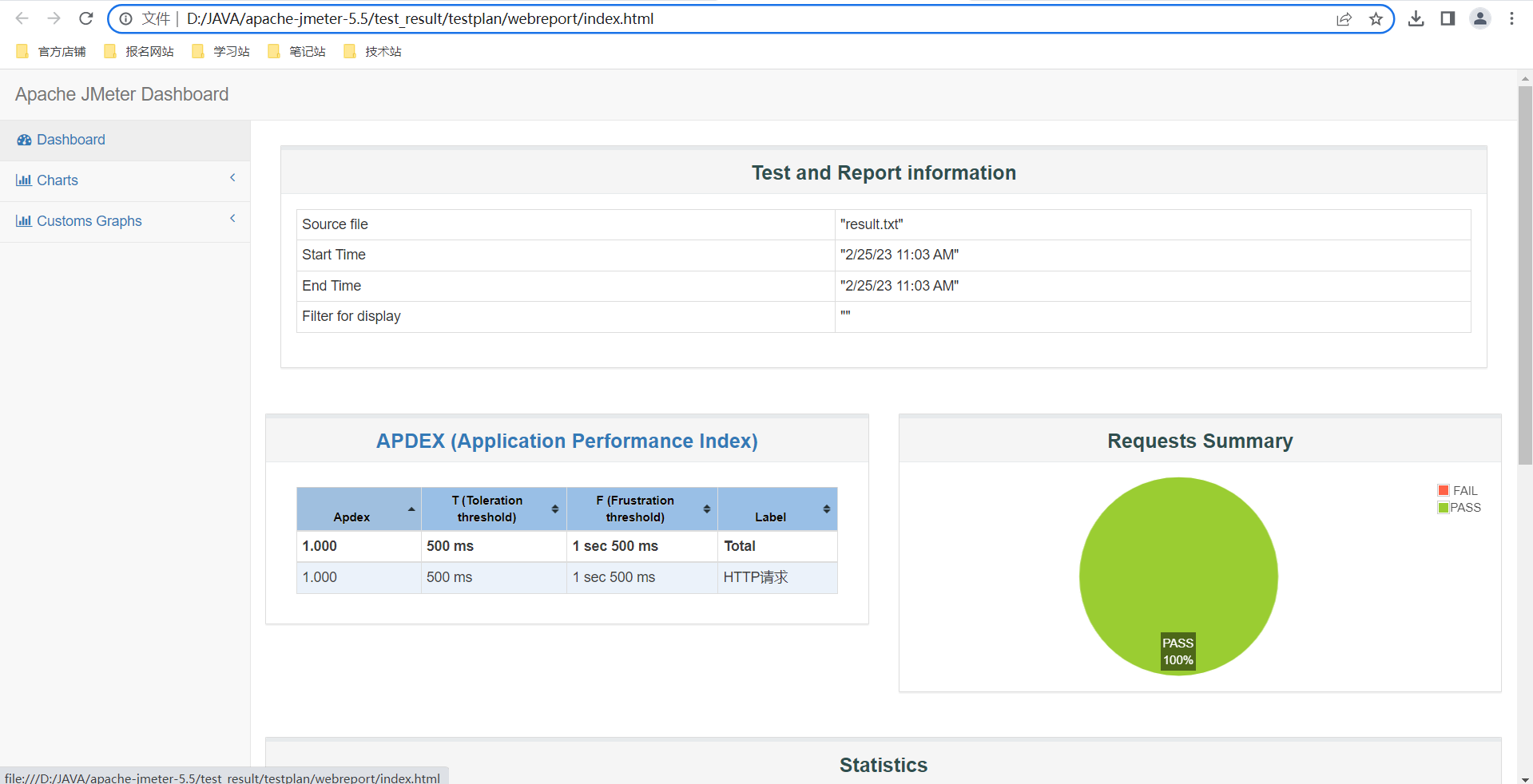
Jmeter使用教程
目录一,简介二,Jmeter安装1,下载2,安装三,创建测试1,创建线程组2,创建HTTP请求默认值3,创建HTTP请求4,添加HTTP请求头5,添加断言6,添加查看结果树…...

论文笔记|固定效应的解释和使用
DeHaan E. Using and interpreting fixed effects models[J]. Available at SSRN 3699777, 2021. 虽然固定效应在金融经济学研究中无处不在,但许多研究人员对作用的了解有限。这篇论文解释了固定效应如何消除遗漏变量偏差并影响标准误差,并讨论了使用固…...
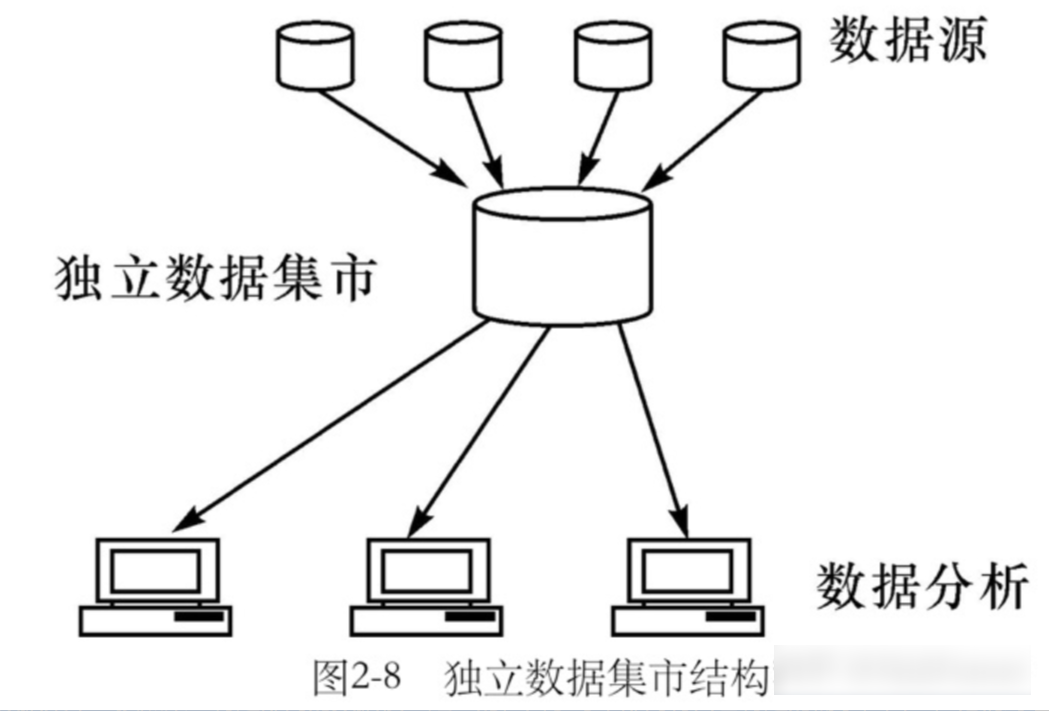
数据集市与数据仓库的区别
数据仓库是企业级的,能为整个企业各个部门的运作提供决策支持;而数据集市则是部门级的,一般只能为某个局部范围内的管理人员服务,因此也称之为部门级数据仓库。 1、两种数据集市结构 数据集市按数据的来源分为以下两种 &#x…...

Golang学习Day3
😋 大家好,我是YAy_17,是一枚爱好网安的小白。 本人水平有限,欢迎各位师傅指点,欢迎关注 😁,一起学习 💗 ,一起进步 ⭐ 。 ⭐ 此后如竟没有炬火,我便是唯一的…...
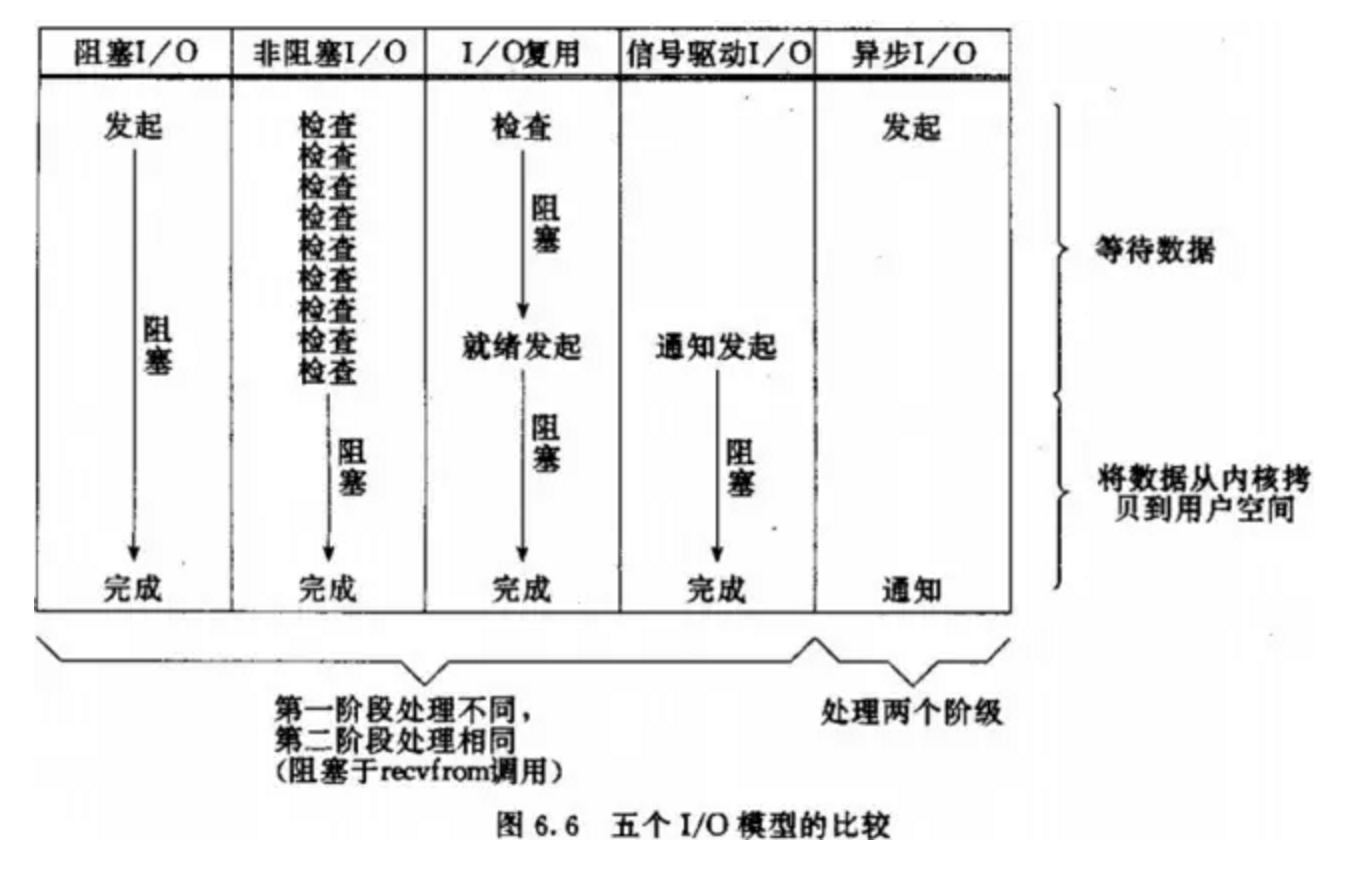
Python并发编程-事件驱动模型
一、事件驱动模型介绍 1、传统的编程模式 例如:线性模式大致流程 开始--->代码块A--->代码块B--->代码块C--->代码块D--->......---&…...
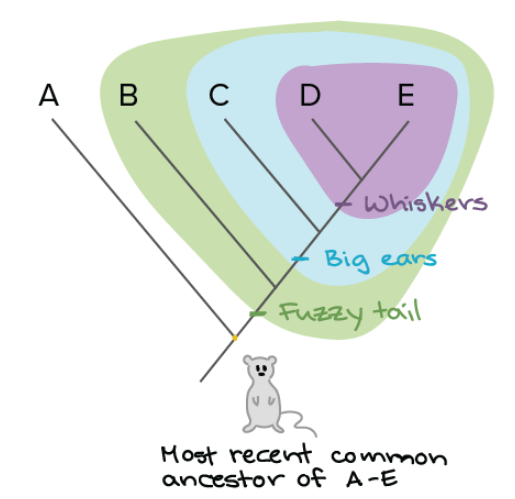
构建系统发育树简述
1. 要点 系统发育树代表了关于一组生物之间的进化关系的假设。可以使用物种或其他群体的形态学(体型)、生化、行为或分子特征来构建系统发育树。在构建树时,我们根据共享的派生特征(不同于该组祖先的特征)将物种组织成…...
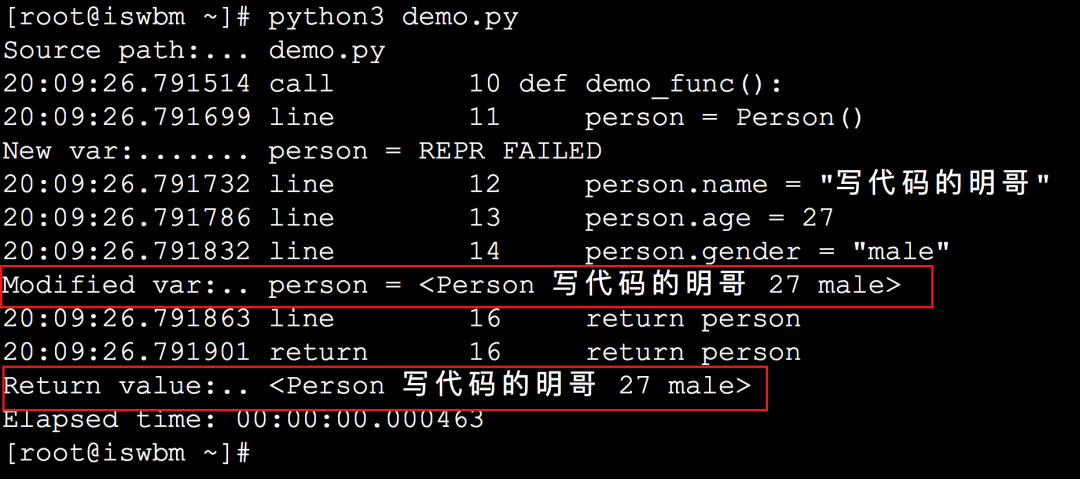
这款 Python 调试神器推荐收藏
大家好,对于每个程序开发者来说,调试几乎是必备技能。 代码写到一半卡住了,不知道这个函数执行完的返回结果是怎样的?调试一下看看 代码运行到一半报错了,什么情况?怎么跟预期的不一样?调试一…...
金三银四吃透这份微服务笔记,面试保准涨10K+
很多人对于微服务技术也都有着一些疑虑,比如: 微服务这技术虽然面试的时候总有人提,但作为一个开发,是不是和我关系不大?那不都是架构师的事吗?微服务不都是大厂在玩吗?我们这个业务体量用得着…...
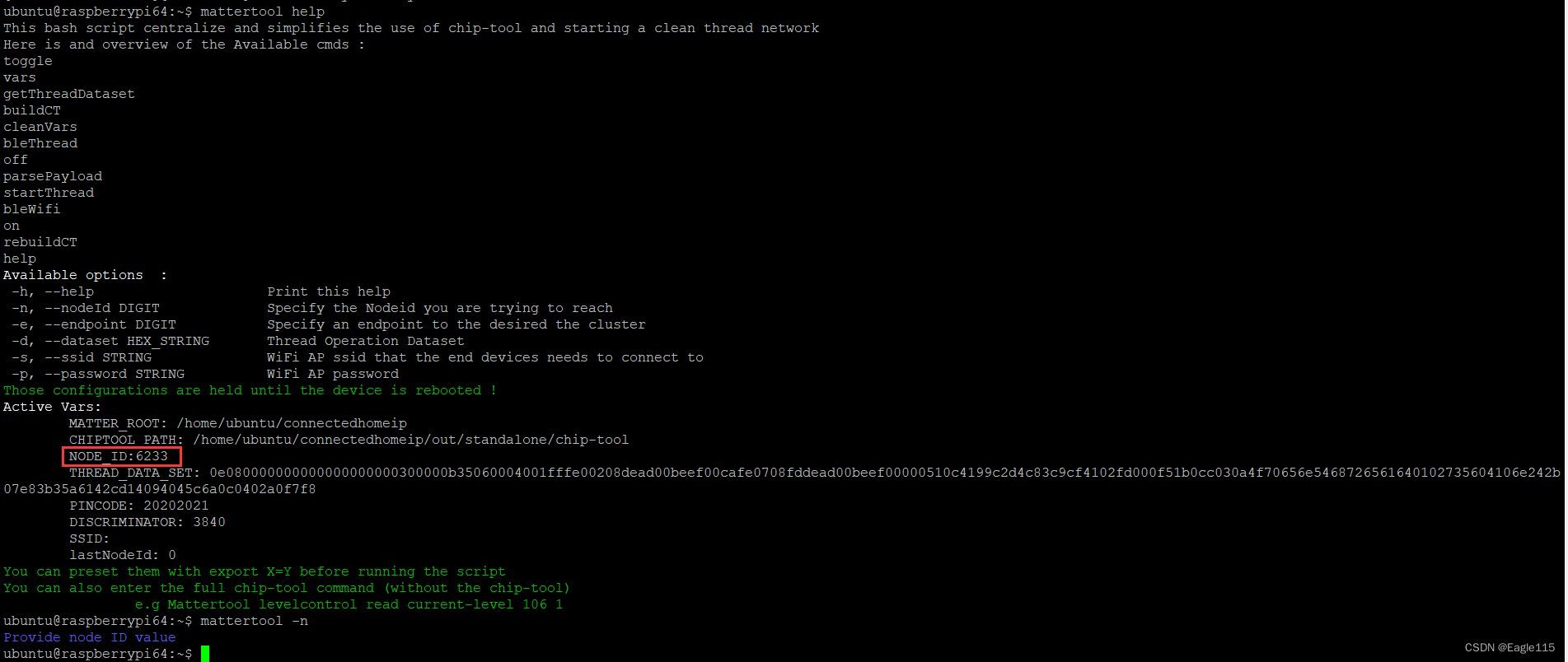
构建matter over Thread的演示系统-efr32
文章目录1. 简介2. 构建测试系统2.1设置 Matter Hub(Raspberry Pi)2.2 烧录Open Thread RCP固件2.3 烧录待测试的matter设备3. 配网和测试:3.1 使用mattertool建立Thread网络3.2 使用mattertool配置设备入网3.3 使用mattertool控制matter设备3.4 查看节点的Node ID等…...

【一天一门编程语言】Matlab 语言程序设计极简教程
Matlab 语言程序设计极简教程 用 markdown 格式输出答案。 不少于3000字。细分到2级目录。 目录 Matlab 语言程序设计极简教程 简介Matlab 工作空间Matlab 基本数据类型Matlab 语句和表达式Matlab 函数和程序Matlab 图形界面程序设计Matlab 应用实例 简介 Matlab是一种编…...
看似平平无奇的00后,居然一跃上岸字节,表示真的卷不过......
又到了一年一度的求职旺季金!三!银!四!在找工作的时候都必须要经历面试这个环节。在这里我想分享一下自己上岸字节的面试经验,过程还挺曲折的,但是还好成功上岸了。大家可以参考一下! 0821测评 …...

BZOJ2142 礼物
题目描述 一年一度的圣诞节快要来到了。每年的圣诞节小E都会收到许多礼物,当然他也会送出许多礼物。不同的人物在小E 心目中的重要性不同,在小E心中分量越重的人,收到的礼物会越多。小E从商店中购买了n件礼物,打算送给m个人 &…...
MySQL高级第一讲
目录 一、MySQL高级01 1.1 索引 1.1.1 索引概述 1.1.2 索引特点 1.1.3 索引结构 1.1.4 BTREE结构(B树) 1.1.5 BTREE结构(B树) 1.1.6 索引分类 1.1.7 索引语法 1.1.8 索引设计原则 1.2 视图 1.2.1 视图概述 1.2.2 创建或修改视图 1.3 存储过程和函数 1.3.1 存储过…...

前端面试常用内容——基础积累
1.清除浮动的方式有哪些? 高度塌陷:当所有的子元素浮动的时候,且父元素没有设置高度,这时候父元素就会产生高度塌陷。 清除浮动的方式: 1.1 给父元素单独定义高度 优点: 快速简单,代码少 缺…...
跟着《代码随想录》刷题(三)——哈希表
3.1 哈希表理论基础 哈希表理论基础 3.2 有效的字母异位词 242.有效的字母异位词 C bool isAnagram(char * s, char * t){int array[26] {0};int i 0;while (s[i]) {// 并不需要记住字符的ASCII码,只需要求出一个相对数值就可以了array[s[i] - a];i;}i 0;whi…...

HTML - 扫盲
文章目录1. 前言2. HTML2.1 下载 vscode3 HTML 常见标签3.1 注释标签3.2 标题标签3.3 段落标签3.4 换行标签3.5 格式化标签1. 加粗2. 倾斜3. 下划线3.6 图片标签3.7 超链接标签3.8 表格标签3.9 列表标签4. 表单标签4.1 from 标签4.2 input 标签4.3 select 标签4.4 textarea标签…...
【系统分析师之路】2022上案例分析历年真题
【系统分析师之路】2022上案例分析历年真题 【系统分析师之路】2022上案例分析历年真题【系统分析师之路】2022上案例分析历年真题2022上案例分析历年真题第一题(25分)2022上案例分析历年真题第二题(25分)2022上案例分析历年真题第…...

Python编程规范
Python编程规范 当今Python编程社区有许多关于编程规范的约定和惯例。以下是一些常见的Python编程规范: 1.使用有意义的命名 使用有意义的命名可以使代码更加清晰、易读、易维护。变量、函数、类和模块的命名应该能够明确传达其用途,而不是使用无意义…...
【Java】Spring Boot项目的创建和使用
文章目录SpringBoot的创建和使用1. 什么是Spring Boot?为什么要学Spring Boot?2. Spring Boot项目的优点3. Spring Boot 项目的创建3.1 使用idea创建3.2 接下来创建Spring Boot项目4. 项目目录介绍和运行4.1 运行项目4.2 输出内容5. 总结SpringBoot的创建…...

对比直接使用厂商API体验Taotoken在多模型选型上的便利
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用厂商API体验Taotoken在多模型选型上的便利 在开发基于大语言模型的应用时,一个常见的需求是尝试不同的模型…...

【Midjourney拟物化风格实战指南】:20年视觉设计专家亲授3大材质渲染公式与5步出图工作流
更多请点击: https://kaifayun.com 第一章:拟物化风格的本质与Midjourney语义解码 拟物化(Skeuomorphism)并非简单的视觉仿拟,而是一种通过材质、光影、物理反馈等多维语义锚点唤起用户认知惯性的交互范式。在AI图像生…...

嵌入式MCU性能评估:CoreMark移植、测试与深度分析指南
1. 项目概述:为什么我们需要CoreMark?在嵌入式开发领域,尤其是基于ARM Cortex-M这类资源受限的微控制器(MCU)进行选型或性能优化时,一个最直接也最令人头疼的问题就是:这颗芯片到底有多“快”&a…...

企业级Agent开发保姆级教程:从入门到交付,看这一篇就够了
一、背景介绍及核心要点企业级Agent开发正在从探索期迅速迈向规模化落地期。2023年Gartner在最新AI成熟度曲线报告中指出,超过68%的全球大型企业已将多Agent协同列入未来3年核心投资清单。首先,Agent已不再是单一对话机器人,而是集成RAG知识库…...

GanttProject终极指南:免费开源的项目管理工具完全攻略
GanttProject终极指南:免费开源的项目管理工具完全攻略 【免费下载链接】ganttproject Official GanttProject repository. 项目地址: https://gitcode.com/gh_mirrors/ga/ganttproject GanttProject是一款功能强大的免费开源项目管理软件,通过直…...
)
Midjourney大画幅风格实战手册(从失效黑边到完美展陈:2023全球TOP 50商业项目验证的7大避坑节点)
更多请点击: https://kaifayun.com 第一章:Midjourney大画幅风格的本质解构与视觉范式跃迁 大画幅风格并非单纯指图像物理尺寸的放大,而是Midjourney通过隐式参数空间重构所催生的一种高密度视觉语义范式——它融合了胶片颗粒质感、景深压缩…...

《CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略》020、从原理到部署的深度学习优化全攻略
CVPR2025-DEIM创新改进项目实战:从原理到部署的深度学习优化全攻略 020、DEIM在嵌入式设备上的部署:ONNX导出与TensorRT优化 一、凌晨三点的调试现场 上周五晚上,我盯着Jetson Orin的终端,看着DEIM模型推理速度卡在12.3ms纹丝不动。旁边同事的YOLOv8已经跑到3.2ms了,差…...

零经验应届生简历怎么写?3分钟AI生成直接拿面试
毕业季到了,你是不是也跟我一样,简历投了几十份,结果石沉大海,连个面试机会都没有?尤其看到那些社招大佬,简历上项目经验、数据成果写得一套一套的,再看看自己的,除了实习经历就是课…...

pyqt 风格
#!/usr/bin/env python3 # -*- coding: utf-8 -*- """ 样式模块 定义全局样式表和动态样式生成 """from typing import Dictclass StyleManager:"""样式管理器"""# 颜色常量COLORS {bg_dark: #0F172A,bg_medium:…...

艾络迅 × 荣耀:联合推出Meteer AI跳舞机器人玩具,智能科技重新定义儿童陪伴
在快节奏的现代生活中,每个孩子都渴望获得专属的陪伴与关注。他们对音乐和律动有着天然的热爱,期待拥有能够与之互动、共同成长的智能伙伴。然而,传统玩具的单一功能已无法满足数字原生代儿童的多元化需求。 正是洞察到这一痛点,艾…...