Arduino IDE + Esp32 Cam + 实现视频流 + 开发环境部署
1、开发环境
Arduino ide 版本:2.2.1
esp32工具:2.0.5
示例代码
#include "esp_camera.h"
#include <WiFi.h>//
// WARNING!!! PSRAM IC required for UXGA resolution and high JPEG quality
// Ensure ESP32 Wrover Module or other board with PSRAM is selected
// Partial images will be transmitted if image exceeds buffer size
//
// You must select partition scheme from the board menu that has at least 3MB APP space.
// Face Recognition is DISABLED for ESP32 and ESP32-S2, because it takes up from 15
// seconds to process single frame. Face Detection is ENABLED if PSRAM is enabled as well// ===================
// Select camera model
// ===================
//#define CAMERA_MODEL_WROVER_KIT // Has PSRAM
// #define CAMERA_MODEL_ESP_EYE // Has PSRAM
//#define CAMERA_MODEL_ESP32S3_EYE // Has PSRAM
//#define CAMERA_MODEL_M5STACK_PSRAM // Has PSRAM
//#define CAMERA_MODEL_M5STACK_V2_PSRAM // M5Camera version B Has PSRAM
//#define CAMERA_MODEL_M5STACK_WIDE // Has PSRAM
//#define CAMERA_MODEL_M5STACK_ESP32CAM // No PSRAM
//#define CAMERA_MODEL_M5STACK_UNITCAM // No PSRAM
#define CAMERA_MODEL_AI_THINKER // Has PSRAM
//#define CAMERA_MODEL_TTGO_T_JOURNAL // No PSRAM
//#define CAMERA_MODEL_XIAO_ESP32S3 // Has PSRAM
// ** Espressif Internal Boards **
// #define CAMERA_MODEL_ESP32_CAM_BOARD
//#define CAMERA_MODEL_ESP32S2_CAM_BOARD
//#define CAMERA_MODEL_ESP32S3_CAM_LCD
//#define CAMERA_MODEL_DFRobot_FireBeetle2_ESP32S3 // Has PSRAM
//#define CAMERA_MODEL_DFRobot_Romeo_ESP32S3 // Has PSRAM
#include "camera_pins.h"// ===========================
// Enter your WiFi credentials
// ===========================
const char* ssid = "*****";
const char* password = "******";void startCameraServer();
void setupLedFlash(int pin);void setup() {Serial.begin(115200);Serial.setDebugOutput(true);Serial.println();camera_config_t config;config.ledc_channel = LEDC_CHANNEL_0;config.ledc_timer = LEDC_TIMER_0;config.pin_d0 = Y2_GPIO_NUM;config.pin_d1 = Y3_GPIO_NUM;config.pin_d2 = Y4_GPIO_NUM;config.pin_d3 = Y5_GPIO_NUM;config.pin_d4 = Y6_GPIO_NUM;config.pin_d5 = Y7_GPIO_NUM;config.pin_d6 = Y8_GPIO_NUM;config.pin_d7 = Y9_GPIO_NUM;config.pin_xclk = XCLK_GPIO_NUM;config.pin_pclk = PCLK_GPIO_NUM;config.pin_vsync = VSYNC_GPIO_NUM;config.pin_href = HREF_GPIO_NUM;config.pin_sccb_sda = SIOD_GPIO_NUM;config.pin_sccb_scl = SIOC_GPIO_NUM;config.pin_pwdn = PWDN_GPIO_NUM;config.pin_reset = RESET_GPIO_NUM;config.xclk_freq_hz = 20000000;config.frame_size = FRAMESIZE_UXGA;config.pixel_format = PIXFORMAT_JPEG; // for streaming//config.pixel_format = PIXFORMAT_RGB565; // for face detection/recognitionconfig.grab_mode = CAMERA_GRAB_WHEN_EMPTY;config.fb_location = CAMERA_FB_IN_PSRAM;config.jpeg_quality = 12;config.fb_count = 1;// if PSRAM IC present, init with UXGA resolution and higher JPEG quality// for larger pre-allocated frame buffer.if(config.pixel_format == PIXFORMAT_JPEG){if(psramFound()){config.jpeg_quality = 10;config.fb_count = 2;config.grab_mode = CAMERA_GRAB_LATEST;} else {// Limit the frame size when PSRAM is not availableconfig.frame_size = FRAMESIZE_SVGA;config.fb_location = CAMERA_FB_IN_DRAM;}} else {// Best option for face detection/recognitionconfig.frame_size = FRAMESIZE_240X240;
#if CONFIG_IDF_TARGET_ESP32S3config.fb_count = 2;
#endif}#if defined(CAMERA_MODEL_ESP_EYE)pinMode(13, INPUT_PULLUP);pinMode(14, INPUT_PULLUP);
#endif// camera initesp_err_t err = esp_camera_init(&config);if (err != ESP_OK) {Serial.printf("Camera init failed with error 0x%x", err);return;}sensor_t * s = esp_camera_sensor_get();// initial sensors are flipped vertically and colors are a bit saturatedif (s->id.PID == OV3660_PID) {s->set_vflip(s, 1); // flip it backs->set_brightness(s, 1); // up the brightness just a bits->set_saturation(s, -2); // lower the saturation}// drop down frame size for higher initial frame rateif(config.pixel_format == PIXFORMAT_JPEG){s->set_framesize(s, FRAMESIZE_QVGA);}#if defined(CAMERA_MODEL_M5STACK_WIDE) || defined(CAMERA_MODEL_M5STACK_ESP32CAM)s->set_vflip(s, 1);s->set_hmirror(s, 1);
#endif#if defined(CAMERA_MODEL_ESP32S3_EYE)s->set_vflip(s, 1);
#endif// Setup LED FLash if LED pin is defined in camera_pins.h
#if defined(LED_GPIO_NUM)setupLedFlash(LED_GPIO_NUM);
#endifWiFi.begin(ssid, password);WiFi.setSleep(false);while (WiFi.status() != WL_CONNECTED) {delay(500);Serial.print(".");}Serial.println("");Serial.println("WiFi connected");startCameraServer();Serial.print("Camera Ready! Use 'http://");Serial.print(WiFi.localIP());Serial.println("' to connect");
}void loop() {// Do nothing. Everything is done in another task by the web serverdelay(10000);
}相关文章:

Arduino IDE + Esp32 Cam + 实现视频流 + 开发环境部署
1、开发环境 Arduino ide 版本:2.2.1 esp32工具:2.0.5 示例代码 #include "esp_camera.h" #include <WiFi.h>// // WARNING!!! PSRAM IC required for UXGA resolution and high JPEG quality // Ensure ESP32 Wrover Modu…...
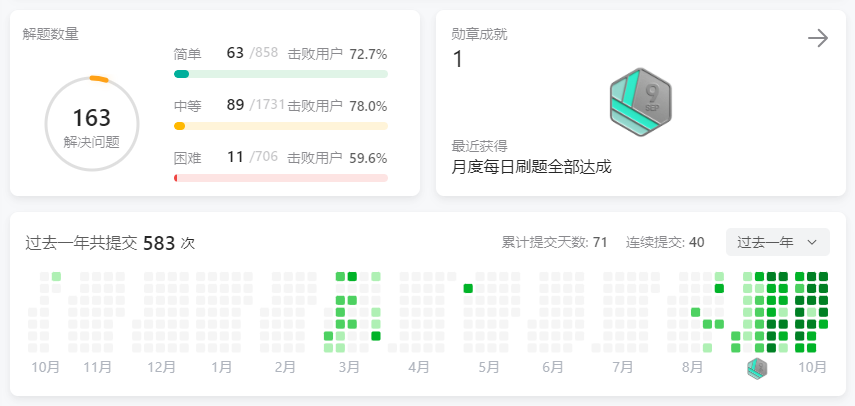
Day4力扣打卡
打卡记录 同积元组(哈希表 排列组合) 链接 思路:用哈希表将数组中出现的两不同数乘积依次记录,将出现两次以上的乘积组通过排列组合计算总情况个数。 class Solution { public:int tupleSameProduct(vector<int>& num…...

Paper Reading:《Consistent-Teacher: 减少半监督目标检测中不一致的伪目标》
目录 简介工作重点方法ASA, adaptive anchor assignmentFAM-3D, 3D feature alignment moduleGMM, Gaussian Mixture Model实施细节 实验与SOTA的比较消融实验 总结 简介 题目:《Consistent-Teacher: Towards Reducing Inconsistent Pseudo-targets in Semi-supervi…...
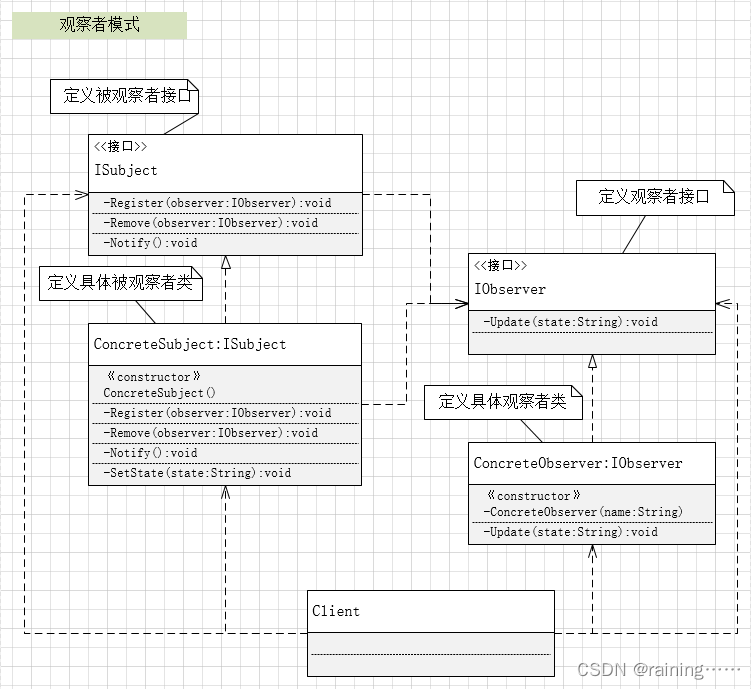
设计模式:观察者模式(C#、JAVA、JavaScript、C++、Python、Go、PHP)
简介: 观察者模式,它是一种行为型设计模式,它允许一个对象自动通知其依赖者(观察者)状态的变化。当被观察者的状态发生改变时,它会通知所有的观察者对象,使他们能够及时做出响应。在观察者模式…...

kotling构造函数
Kotlin-继承与构造函数 - 简书 (jianshu.com) Kotlin语言中的继承与构造函数(详解)_kotlin 继承 构造函数_young螺母的博客-CSDN博客...

SpringMVC - 详解RESTful
文章目录 1. 简介2. RESTful的实现3.HiddenHttpMethodFilter4. RESTful案例1、准备工作2、功能清单3、具体功能:访问首页a>配置view-controllerb>创建页面 4、具体功能:查询所有员工数据a>控制器方法b>创建employee_list.html 5、具体功能&a…...
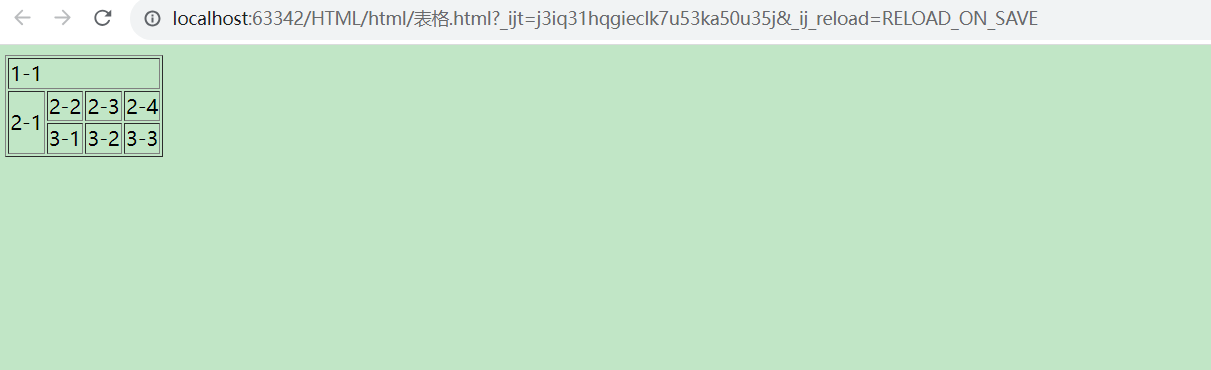
html表格标签
<!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>Title</title> </head> <body><!--表格table 行 tr 列 td --> <table border"1px"><tr> <!--colsp…...

Node.JS---npm相关
文章目录 前言一、package.json配置项version:1.0.0devDependenciesdependenciespeerDependenciesoptionalDependencies 二、npm命令1、npm config listxmzs使用2、npm installpackage-lock.json作用 3、npm run4、 查看全局安装的可执行文件 npm生命周期npxnpx简介…...
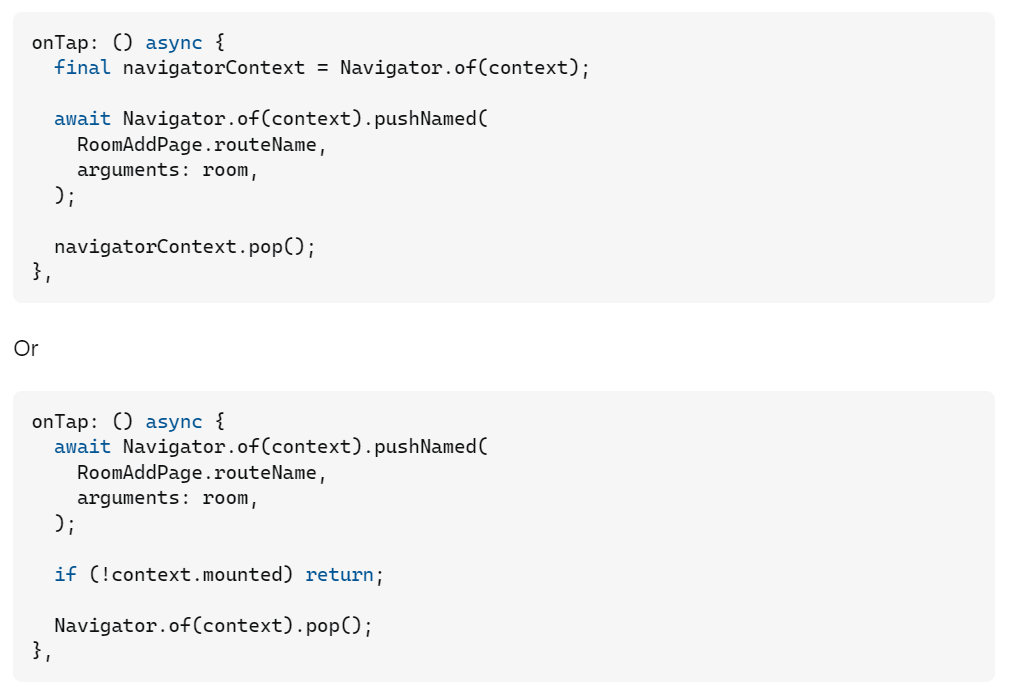
Flutter的Don‘t use ‘BuildContext‘s across async gaps警告解决方法
文章目录 问题有问题的源码 问题原因问题分析Context的含义BuildContext的作用特殊情况 解决方法 问题 Flutter开发中遇到Don’t use BuildContext’s across async gaps警告 有问题的源码 if (await databaseHelper.isDataExist(task.title)) {showDialog(context: context,…...

Nginx 实战教程
本篇博客我会演示日常的工作中,我们是怎么利用nginx部署项目的。我们以部署一套前后分离的项目为本次讲述的内容 一、搭建后端项目 创建一个最简单的springboot项目: 只需要依赖一个web模块即可: 提供一个api接口,可以获取服务端…...

Web自动化——python
文章目录 1.八大元素定位2.元素基本操作3.浏览器常用操作4.获取元素信息的常用方法5.鼠标和键盘相关操作6.元素等待1.隐式等待2.显示等待 7.下拉选择框8.弹出框9.滚动条操作10.frame表单的切换11.多窗口切换12.窗口截图、验证码处理 1.八大元素定位 元素属性定位:id…...
【java】A卷+B卷)
华为OD 整数最小和(100分)【java】A卷+B卷
华为OD统一考试A卷+B卷 新题库说明 你收到的链接上面会标注A卷还是B卷。目前大部分收到的都是B卷。 B卷对应20022部分考题以及新出的题目,A卷对应的是新出的题目。 我将持续更新最新题目 获取更多免费题目可前往夸克网盘下载,请点击以下链接进入: 我用夸克网盘分享了「华为O…...

正则表达式:文本处理中的瑞士军刀
正则表达式是用于提取字符串规律的规则,通过特定语法表达,以匹配符合该规律的字符串。它具有通用性,不仅适用于Python,也可用于其他编程语言。 下面我用Python的re模块来进行实战演示:(记得import re&…...
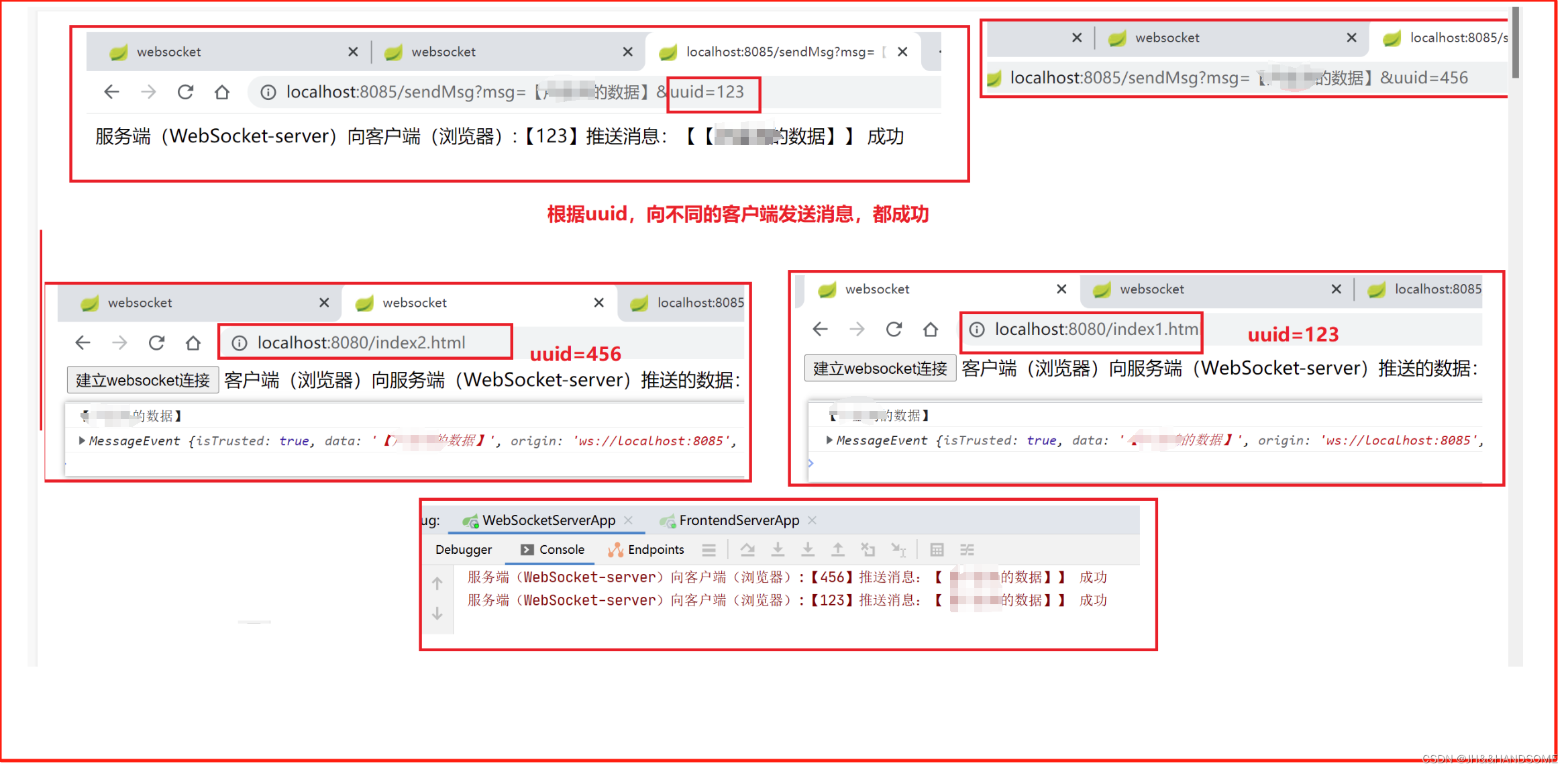
WebSocket 入门案例
目录 WebSocket入门案例WebSocket-server新增项目:添加依赖:yml:启动类: frontend-server前端项目:添加依赖:添加yml:启动类:前端引入JS:前端页面:后端代码:测试: WebSocket 入门案…...
【java】A卷+B卷)
华为OD 最大社交距离(100分)【java】A卷+B卷
华为OD统一考试A卷+B卷 新题库说明 你收到的链接上面会标注A卷还是B卷。目前大部分收到的都是B卷。 B卷对应20022部分考题以及新出的题目,A卷对应的是新出的题目。 我将持续更新最新题目 获取更多免费题目可前往夸克网盘下载,请点击以下链接进入: 我用夸克网盘分享了「华为O…...

Nginx缓存
Nginx缓存 一般情况下系统用到的缓存有三种 服务端缓存:缓存存在后端服务器,如redis 代理缓存:缓存存储在代理服务器或中间件,内容从后端服务器获取,保存在本地 客户端缓存:缓存在浏览器 [ ] 什么时候会出现…...

Pyecharts绘图教程(2)—— 绘制多种折线图(Line)参数说明+代码实战
文章目录 🎯 1 简介🎯 2 图表配置项2.1 导入模块2.2 数据配置项2.3 全局配置项 🎯 3 代码实战3.1 基础折线3.2 平滑曲线(is_smooth)3.3 阶梯折线(is_step)3.4 空值过渡(is_connect_n…...

oracle实现搜索不区分大小写
<if test"code ! null and code ! ">and upper(code) like upper(%${code}%) </if>关键字upper...
C++中->与.的区别
在类中 在 C 中,-> 和 . 都可以用于访问类的成员变量和成员函数。但它们在使用上有一些区别: 1. 对于指针类型的对象,必须使用 -> 来访问其成员;而对于非指针类型的对象,则需要使用 . 。 2. -> 运算符在实…...
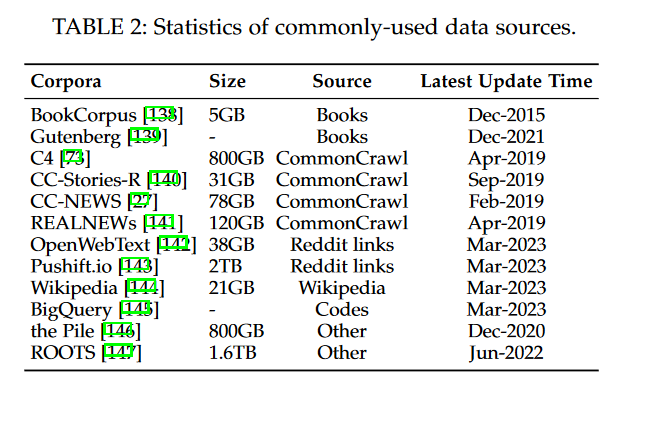
大语言模型(LLM)综述(二):开发大语言模型的公开可用资源
A Survey of Large Language Models 前言3. RESOURCES OF LLMS3.1 公开可用的模型CheckPoints或 API3.2 常用语料库3.3 库资源 前言 随着人工智能和机器学习领域的迅速发展,语言模型已经从简单的词袋模型(Bag-of-Words)和N-gram模型演变为更…...

2025届毕业生推荐的降AI率平台横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 切实有效地降低知网AI检测率,为此特别建议采取下面这些策略:首先&…...

AI前沿思想、AI理想、AI的妄言、AI极致观测文明
一、前言本文来自全世界的信息整理,本人对Ai内容进行记录和学习 ,如有异议和争论,请留言更正,不涉及现实相关事实。本文观点仅供参考。如有雷同,不回应。二、AI文明级变革观点1.旨在记录那些冲破常规的、甚至略显疯狂的…...
 Nginx 反向代理与负载均衡:一台服务器扛不住怎么办)
devops系列(一) Nginx 反向代理与负载均衡:一台服务器扛不住怎么办
devops系列(一) Nginx 反向代理与负载均衡:一台服务器扛不住怎么办 问题引入:半夜被报警短信炸醒的滋味 上个月有个周三,凌晨两点,我被钉钉报警震醒了。 打开手机一看,全是 “Tomcat 响应超时”、“接口 504 Gatewa…...

2026海洋经济产业链图谱全解析:11万亿背后,藏着哪些机会?
海洋经济是指开发、利用和保护海洋的各类产业活动,以及与之相关联的活动的总和。 2026年3月,中商产业研究院发布了《2026年中国海洋经济产业链图谱及投资布局分析报告》。这不是一份学术论文,而是一张清晰的“产业地图”——它把海洋经济拆成…...

Multi-Agent 任务分解框架:从目标到子任务的可执行清单
Multi-Agent 任务分解框架:从目标到子任务的可执行清单 一、 引言 (Introduction) 1.1 钩子:当你拥有“一支 AI 团队”却不知道怎么派活? 假设你正在创业,或者在公司担任产品/技术负责人,现在需要完成一件综合性、跨专业、依赖协作反馈的任务——比如: 从零搭建一个面向…...

WPF 多屏显示实战:从零构建跨屏窗口管理器,避坑指南与性能优化
1. WPF多屏显示的核心挑战与解决方案 在工业控制、数字看板等场景中,多屏显示是刚需。但很多开发者第一次尝试时都会遇到这样的问题:明明代码逻辑正确,窗口却始终在主屏幕弹出,或者在不同DPI的屏幕上出现显示错位。这背后涉及三个…...

如何5分钟内释放20GB空间:Windows Cleaner完整磁盘清理指南
如何5分钟内释放20GB空间:Windows Cleaner完整磁盘清理指南 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是否经常遇到C盘爆红的窘境?…...

Foldseek蛋白质结构比对:高性能算法优化与大规模数据库分析技术
Foldseek蛋白质结构比对:高性能算法优化与大规模数据库分析技术 【免费下载链接】foldseek Foldseek enables fast and sensitive comparisons of large structure sets. 项目地址: https://gitcode.com/gh_mirrors/fo/foldseek 蛋白质结构比对是结构生物信息…...

如何查找SQL字符集中某位置_使用POSITION函数查询
POSITION函数返回子串首次出现位置(从1开始),未找到返回0;标准写法为POSITION(sub IN str),PostgreSQL/MySQL 8.0支持,旧版MySQL需用LOCATE;大小写敏感,跨库兼容性优于INSTR/CHARIND…...

3步实现Chrome浏览器与KeePass密码库无缝同步
3步实现Chrome浏览器与KeePass密码库无缝同步 【免费下载链接】ChromeKeePass Chrome extensions for automatically filling credentials from KeePass/KeeWeb 项目地址: https://gitcode.com/gh_mirrors/ch/ChromeKeePass 你是否厌倦了每次登录网站都要手动输入密码&a…...