cv::solvePnP使用方法及注意点详解(OpenCV/C++)
cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec, useExtrinsicGuess, flags);1、参数说明:
- objectPoints:一个 vector<cv::Point3f>,包含了在世界坐标系中的三维点的坐标,至少需要4个点。
- imagePoints:一个 vector<cv::Point2f>,包含了对应的图像上的二维点的坐标,与 objectPoints 中的点一一对应。
- cameraMatrix:相机的内参数矩阵,类型为 cv::Mat,一般为 3x3 的浮点数矩阵。
- distCoeffs:相机的畸变系数,类型为 cv::Mat,一般为 4x1 或 5x1 的浮点数矩阵。
- rvec:输出的旋转向量,类型为 cv::Mat,是大小为 3x1 的浮点数矩阵。
- tvec:输出的平移向量,类型为 cv::Mat,是大小为 3x1 的浮点数矩阵。
- useExtrinsicGuess:一个布尔值,表示是否使用可选的旋转和平移向量的初始猜测。默认为 false。
- flags:一个用于控制函数行为的选项标志,默认为 0。
函数返回:
- 成功返回 true,失败返回 false。
2、使用说明:
objectPoints, imagePoints, cameraMatrix, distCoeffs 四个参数作为输入参数
rvec, tvec 作为输出参数
objectPoints是世界坐标系的三维坐标
imagePoints是图像上的二维点坐标
例如 使用标定好的单目相机拍摄一个矩形物体(已知相机内参&畸变系数),
objectPoints:使用量尺测量物体的左上角、右上角、左下角、右下角之间的距离,以任意一个点作为0点,建立世界坐标系,z值设为0,得到所有点的坐标则为objectPoints,保存在vector中。
imagePoints:在图像中找到物体的左上角、右上角、左下角、右下角四个点,其所有点的像素坐标为imagePoints,保存在vector中。
使用示例:
#include <iostream>
#include <vector>
#include <opencv2/opencv.hpp>int main() {std::vector<cv::Point3f> objectPoints; // 世界坐标系中的三维点std::vector<cv::Point2f> imagePoints; // 图像上的二维点// 添加 objectPoints 和 imagePoints 的数据// 创建相机内参数矩阵cv::Mat cameraMatrix = (cv::Mat_<double>(3,3) << fx, 0, cx, 0, fy, cy, 0, 0, 1); // 创建相机畸变系数矩阵cv::Mat distCoeffs = (cv::Mat_<double>(1,5) << k1, k2, p1, p2, k3;//完善内参参数&畸变系数参数 cv::Mat rvec; // 输出的旋转向量cv::Mat tvec; // 输出的平移向量bool success = cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec);if (success) {// 获取旋转向量和平移向量的结果cv::Mat rotationMatrix;cv::Rodrigues(rvec, rotationMatrix);std::cout << "Rotation Vector:" << std::endl << rvec << std::endl;std::cout << "Translation Vector:" << std::endl << tvec << std::endl;std::cout << "Rotation Matrix:" << std::endl << rotationMatrix << std::endl;}return 0;
}3、注意事项:
在使用solvePnP时,需注意objectPoints和imagePoints容器中的点坐标必须一一对应,例如只有四个点时,全部按左上角、右上角、左下角、右下角的顺序存放在容器中;如果顺序不相同,则最终输出值有误。
在笔者使用solvePnP时,拍摄物是四个定位圆,圆的像素坐标是通过opencv的SimpleBlobDetector识别的,识别以后的圆像素坐标是无序的,无法和objectPoints对应上,因此有了下述算法,
用于为四个二维坐标做冒泡排序得到左上角、右上角、左下角、右下角分别对应的点
(如果没有该需求,可以忽略此段)
int main() {std::vector<cv::Point2f> imagePoints; // 存放四个点的 vector// 假设已经将四个点的坐标存入 imagePoints 中// 寻找左上角、右上角、右下角和左下角对应的点cv::Point2f topLeft, topRight, bottomRight, bottomLeft;float minX = FLT_MAX, minY = FLT_MAX;float maxX = FLT_MIN, maxY = FLT_MIN;for (const auto& point : imagePoints) {if (point.x <= minX && point.y <= minY) {topLeft = point;minX = point.x;minY = point.y;}if (point.x >= maxX && point.y <= minY) {topRight = point;maxX = point.x;minY = point.y;}if (point.x >= maxX && point.y >= maxY) {bottomRight = point;maxX = point.x;maxY = point.y;}if (point.x <= minX && point.y >= maxY) {bottomLeft = point;minX = point.x;maxY = point.y;}}// 输出左上角、右上角、右下角和左下角对应的点的坐标std::cout << "左上角坐标: (" << topLeft.x << ", " << topLeft.y << ")" << std::endl;std::cout << "右上角坐标: (" << topRight.x << ", " << topRight.y << ")" << std::endl;std::cout << "右下角坐标: (" << bottomRight.x << ", " << bottomRight.y << ")" << std::endl;std::cout << "左下角坐标: (" << bottomLeft.x << ", " << bottomLeft.y << ")" << std::endl;// 新建一个vector存放四个点坐标,按照objectPoints的存放顺序进行存放std::vector<cv::Point2f> imagePoints2; imagePoints2.push_back(topLeft);imagePoints2.push_back(topRight);imagePoints2.push_back(bottomRight);imagePoints2.push_back(bottomLeft);return 0;
}4、补充
通过solvePnP得到旋转向量rvec和平移向量tvec后,可以计算相机到被测物中心的实际距离
#include <cmath>
#include <iostream>
#include <vector>
#include <opencv2/opencv.hpp>int main() {std::vector<cv::Point3f> objectPoints; // 世界坐标系中的三维点std::vector<cv::Point2f> imagePoints; // 图像上的二维点// 添加 objectPoints 和 imagePoints 的数据// 创建相机内参数矩阵cv::Mat cameraMatrix = (cv::Mat_<double>(3,3) << fx, 0, cx, 0, fy, cy, 0, 0, 1); // 创建相机畸变系数矩阵cv::Mat distCoeffs = (cv::Mat_<double>(1,5) << k1, k2, p1, p2, k3;//完善内参参数&畸变系数参数 cv::Mat rvec; // 输出的旋转向量cv::Mat tvec; // 输出的平移向量bool success = cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec);if (success) {//计算相机距离被测物的实际距离float distance = sqrt(tvec.at<double>(0,0) * tvec.at<double>(0,0) + tvec.at<double>(1,0) * tvec.at<double>(1,0) + tvec.at<double>(2,0) * tvec.at<double>(2,0)) / 10; std::cout << "distance = "<< distance << std::endl;}return 0;
}
相关文章:
)
cv::solvePnP使用方法及注意点详解(OpenCV/C++)
cv::solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs, rvec, tvec, useExtrinsicGuess, flags); 1、参数说明: objectPoints:一个 vector<cv::Point3f>,包含了在世界坐标系中的三维点的坐标,至少需要4个点…...

DevOps持续集成-Jenkins(4)
❤️作者简介:2022新星计划第三季云原生与云计算赛道Top5🏅、华为云享专家🏅、云原生领域潜力新星🏅 💛博客首页:C站个人主页🌞 💗作者目的:如有错误请指正,将…...

【数据仓库-零】数据仓库知识体系 ing
文章目录 一. 数仓基本概念二. 离线数仓建设方法论三. etl流程四. 数仓规范建设指南四. 数据仓库架构五. 数据可视化 通过熟悉构建数仓整体的过程,可以系统的了解 数仓构建理论:能够站在全局角度看数仓的运行架构,数仓执行流程。了解到构建数…...

css3 3D 转换 技巧详细解析与代码实例
CSS3 3D转换是CSS3中的一项新特性,通过它我们可以比较容易地实现3D效果。在这里,我将向大家介绍CSS3 3D转换的一些基本概念、使用方法和常见技巧。 1. 基本概念 在使用CSS3 3D转换时,需要了解一些基础概念: 三维坐标系…...

[Unity]给场景中的3D字体TextMesh增加描边方案一
取你的文本对象,简单地添加以下脚本: using UnityEngine; using System.Collections; using UnityEngine.UI;public class TextOutline : MonoBehaviour {public float pixelSize 1;public Color outlineColor Color.black;public bool resolutionDependant fal…...
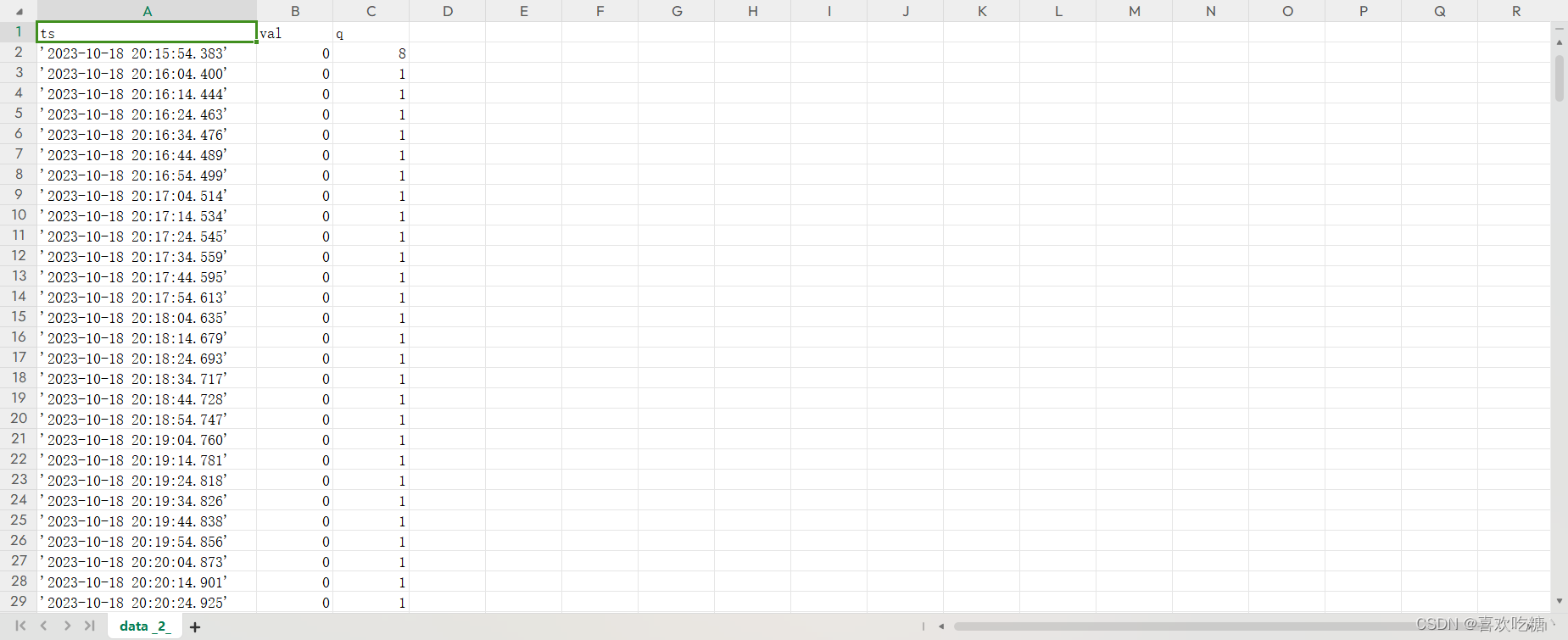
TDengine(taos)数据库导出历史数据
业务需求:导出某个站点的累计充电量,累计放电量,光伏总放电量,进线总功率的所有数据‘ 1、登录taos,使用存数据的库; 提示Database changed;即为使用成功; 2、找到你想要导出的字段…...

算法进修Day-37
算法进修Day-37 73. 矩阵置零 难度:中等 题目要求 给定一个 _m_ x _n_ 的矩阵,如果一个元素为 0 ,则将其所在行和列的所有元素都设为 0 。请使用 原地 算法。 示例1 输入:matrix [[1,1,1],[1,0,1],[1,1,1]] 输出:[…...

服务器之日常整活
文章目录 一,序二、服务器相关流水帐未完,待补充 一,序 假如你有一台服务器,你最想做哪些事? 等等,什么叫假如你有一台服务器,假如只有一台,肯定我想搞第二台,顺便第三台…...
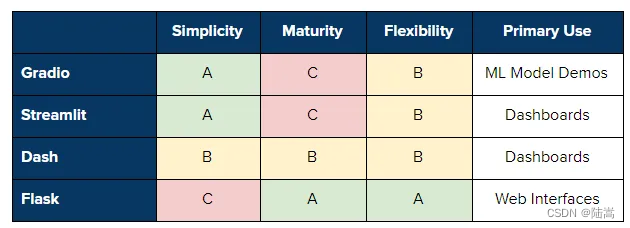
交互式 Web 应用 0 基础入门
初探 Gradio:轻松构建交互式 Web 应用 文章目录 初探 Gradio:轻松构建交互式 Web 应用Why Gradio?安装 Gradio创建交互式界面1. gr.Interface2. gr.Blocks 强大的组件库输入输出组件控制组件布局组件 示例交互式数据可视化多组件同时(嵌套&a…...

JSONP的安全性较差,那么在跨域情况下,有没有其他更安全的替代方案呢?
在跨域情况下,为了保证安全性,有几种更安全的替代方案可以考虑使用: 1:CORS(Cross-Origin Resource Sharing): CORS 是一种现代化的跨域解决方案,通过在服务器端设置响应头来控制跨…...

Slax Linux 获得增强的会话管理和启动参数选项
Slax Linux 的创建者和维护者托马斯-马特吉切克(Tomas Matejicek)在自己生日这天(生日快乐!)发布了其小巧便携的 GNU/Linux 发行版的新版本,带来了各种增强功能和错误修复。 新发布的 Slax Linux 版本&…...
C/C++新冠疫情死亡率 2020年9月电子学会青少年软件编程(C/C++)等级考试一级真题答案解析
目录 C/C新冠疫情死亡率 一、题目要求 1、编程实现 2、输入输出 二、算法分析 三、程序编写 四、程序说明 五、运行结果 六、考点分析 C/C新冠疫情死亡率 2020年9月 C/C编程等级考试一级编程题 一、题目要求 1、编程实现 2020年全世界爆发了新冠疫情,请…...
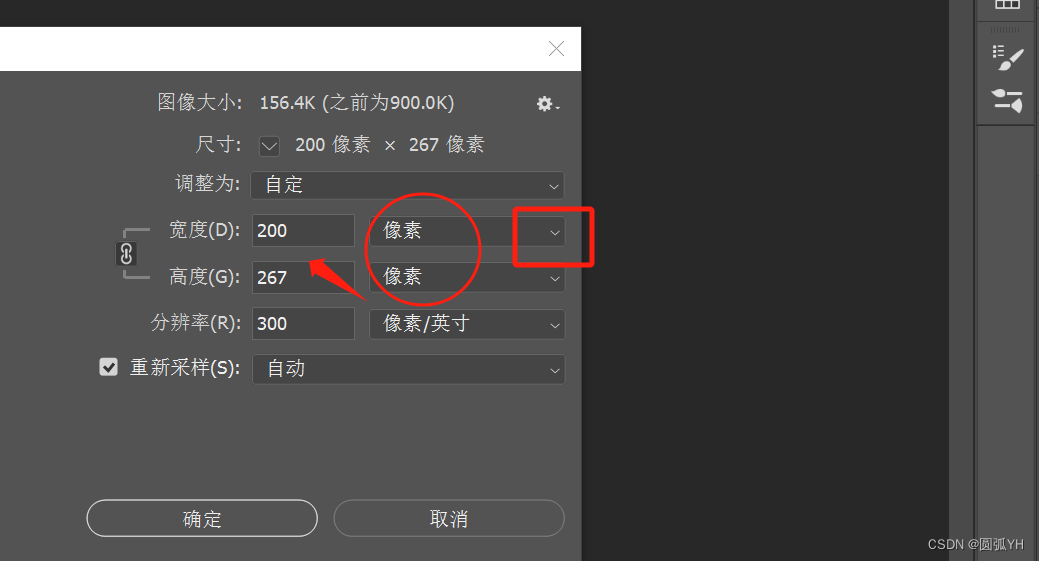
Adobe Photoshop 基本操作
PS快捷键 图层 选择图层 Ctrl T:可以对图层的大小和位置进行调整 填充图层 MAC: AltBackspace (前景) or CtrlBackspace (背景) WINDOWS: AltDelete (前景) or CtrlDelete (背景) 快速将图层填充为前景色或背景色 平面化图层(盖印图层)…...

SpringMVC原理及核心组件
一、SpringMVC原理及核心组件 1、 Spring MVC的工作原理 Spring MVC 是一个对javaWeb中Servlet 简化和封装, 1.首先SpringMVC 配置DispatcherServlet 来接受所有的请求,我们通过DispatcherServlet 响应的所有数据,DispatcherServlet 是Htt…...

【rk3568-linux】 rk3568x_linux-- 编译说明
概述 一个好的安装教程能够帮助开发者完成更便捷、更快速的开发。书山有路勤为径,学海无涯苦作舟。我是秋知叶i、期望每一个阅读了我的文章的开发者都能够有所成长。 开发环境 开发环境:ubuntu18 文章目录 概述开发环境一、选择型号二、全自动编译三、…...

模拟计算器编程教程,中文编程开发语言工具编程实例
模拟计算器编程教程,中文编程开发语言工具编程实例 中文编程系统化教程,不需英语基础。学习链接 https://edu.csdn.net/course/detail/39036 课程安排:初级1 1 初级概述 2 熟悉构件取值赋值 3 折叠式菜单滑动面板编程 4 自定…...

Spring Security漏洞防护—HTTP 安全响应头
一、默认的 Security Header Spring Security提供了 一套默认的安全HTTP响应头,以提供安全默认值。虽然这些头信息中的每一个都被认为是最佳实践,但应该注意的是,并不是所有的客户端都使用这些头信息,所以鼓励进行额外的测试。 …...

Plooks大型视频在线一起看网站源码
在前段时间,因为想和异地的朋友一起看电影,但是发现有电影的地方没有一起看功能,有一起看功能的视频网站没有电影,所以就想自己做一个一起看网站,于是就有了Plooks。 Plooks是一个完整的视频网站,其中包括…...

图像处理中底层、高层特征、上下文信息理解
1.图像的语义信息: 图像的语义分为视觉层、对象层和概念层。 视觉层即通常所理解的底层,即颜色、纹理和形状等等,这些特征都被称为底层特征语义; 对象层即中间层,通常包含了属性特征等,就是某一对象在某一时刻的状态&a…...
)
负载均衡的算法(静态算法与动态算法)
1.静态算法 静态算法是不考虑服务器动态负载的算法,包括: (1)轮转算法:轮流将服务请求(任务)调度给不同的节点(即:服务器)。 (2)加…...

LinuxUDP丢包自动化巡检实践
LinuxUDP丢包自动化巡检实践这是一篇面向中级 Linux 使用者的技术文章,主题聚焦在UDP丢包,重点讨论无连接流量、内核缓冲和应用接收能力。在真实生产环境中,UDP丢包相关问题往往不会以单一错误形式出现,而是混杂在日志、权限、资源…...

Perplexity移动端体验崩塌实录:iOS/Android双平台1372条崩溃日志聚类分析,含Google Play App Store差评时间戳热力图
更多请点击: https://codechina.net 第一章:Perplexity用户评论汇总 Perplexity AI 作为一款以“引用驱动”为特色的问答式搜索引擎,自上线以来持续吸引学术研究者、开发者与技术爱好者群体。其用户评论呈现高度两极化特征:一方面…...

ComfyUI Portrait Master中文版:终极AI肖像提示词生成指南
ComfyUI Portrait Master中文版:终极AI肖像提示词生成指南 【免费下载链接】comfyui-portrait-master-zh-cn 肖像大师 中文版 comfyui-portrait-master 项目地址: https://gitcode.com/gh_mirrors/co/comfyui-portrait-master-zh-cn ComfyUI Portrait Master…...
)
Linux 登录用户、主机名、提示符详解(新手不迷路)
前言刚打开Linux终端,新手总会被一行奇怪的字符搞懵:ubuntuubuntu:~$ —— 这串字符到底是什么意思?“ubuntu”重复出现,冒号、波浪号、美元符号又代表什么?其实,这串字符就是Linux的“提示符”,…...

堆叠集成方法
原文:towardsdatascience.com/the-stacking-ensemble-method-984f5134463a 发现堆叠在机器学习中的力量——一种将多个模型组合成一个单一强大预测器的技术。本文从基础知识到高级技术探讨了堆叠,揭示了它是如何结合不同模型的优势以提高准确性的。无论你…...

Auto.js开发环境搭建:用雷电模拟器替代真机,解决局域网IP不在同一网段的问题
Auto.js开发环境搭建:雷电模拟器网络架构深度解析与实战指南 当开发者手头没有备用安卓设备,或者真机与电脑的Wi-Fi连接频繁断开时,安卓模拟器成为了Auto.js脚本测试的救星。但模拟器的网络配置往往暗藏玄机——为什么雷电模拟器显示172.16.x…...

双足机器人推进系统建模与系统辨识技术解析
1. 双足机器人推进系统建模与验证概述在机器人动力学控制领域,系统辨识是建立精确数学模型的关键技术。本文以美国东北大学开发的Harpy v2双足机器人为研究对象,重点探讨其集成推进系统的推力与扭矩特性建模方法。这款机器人高约1.2米,重15公…...

标题:【2026 最全】CTF 零基础入门指南|小白必看,一篇封神!
前言 CTF(Capture The Flag)中文一般译作夺旗赛,在网络安全领域中指的是网络安全技术人员之间进行技术竞技的一种比赛形式。发展至今,已经成为全球范围网络安全圈流行的竞赛形式,而DEFCON作为CTF赛制的发源地…...

深入Keil5编译器:解读#1295-D警告背后的C语言函数原型进化史
深入Keil5编译器:解读#1295-D警告背后的C语言函数原型进化史 当你在Keil5环境下打开一个遗留的单片机项目时,那个看似微不足道的#1295-D: Deprecated declaration警告可能正暗示着一段跨越四十年的编程语言进化史。这个关于函数声明的警告不是Keil5的任…...

从Kafka设计哲学到高性能系统通用模式:吞吐、顺序I/O与批处理的艺术
1. 项目概述:为什么是Kafka?如果你在后台开发、数据平台或者中间件领域摸爬滚打过几年,大概率会听过甚至深度使用过Apache Kafka。它早已不是一个简单的消息队列,而是现代数据驱动架构的“中枢神经系统”。我最初接触Kafka&#x…...