【三维重建-PatchMatchNet复现笔记】
【三维重建-PatchMatchNet复现笔记】
- 1 突出贡献
- 2 数据集描述
- 3 训练PatchMatchNet
- 3.1 输入参数
- 3.2 制定数据集加载方式
1 突出贡献
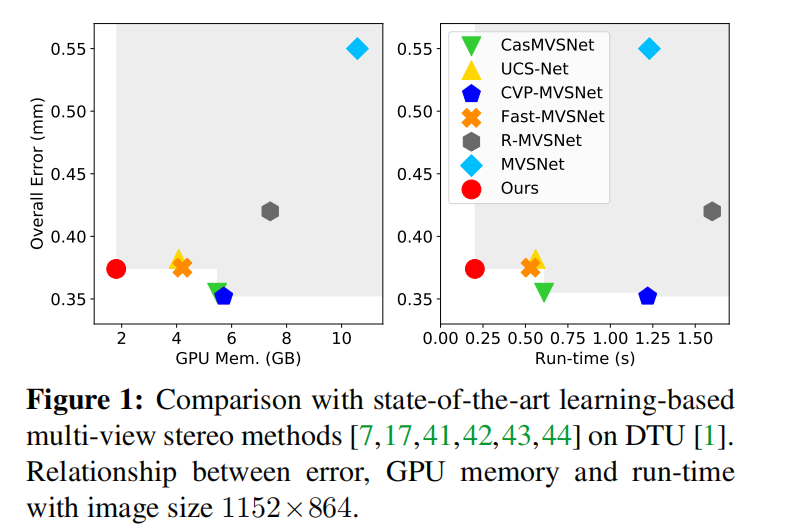
在计算机GPU和运行时间受限的情况下,PatchMatchNet测试DTU数据集能以较低GPU内存和较低运行时间,整体误差位列中等,成为2020年多视图三维重建(MVS,Multi-view Stereo)的折中方案.
特点:
高速,低内存,可以处理更高分辨率的图像,它的效率比所有现有的性能最好的模型都要高得多: 比最先进的方法至少快2.5倍,内存使用量减少一倍。
首次在端到端可训练架构中引入了迭代的多尺度Patchmatch,并用一种新颖的、可学习的自适应传播和每次迭代的评估方案改进了传统Patchmatch核心算法。
主要贡献
基于学习的方法比传统的方法有优势,但是受限于内存和运行时间,于是将补丁匹配的想法引入到端到端可训练的深度学习中,用可学习的自适应模块增强了补丁匹配的传统传播和代价评估步骤,减少了内存消耗和运行时间。
2 数据集描述
(1)在学习PatchMatchNet之前,先了解DTU数据集的特点有助于理解算法的实现步骤,DTU数据集是一种在特定条件下拍摄的多视图数据集。其包含128种物体的多视图,分别使用64个固定的相机(表明有64个相机内、外参数)拍摄具有一定重合区域的图片。相机参数如下形式:
extrinsic(外参:旋转矩阵R、T)
0.126794 -0.880314 0.457133 -272.105
0.419456 0.465205 0.779513 -485.147
-0.898877 0.09291 0.428238 629.679
0.0 0.0 0.0 1.0intrinsic(内参:针孔相机的["fx", "fy", "cx", "cy"])
2892.33 0 823.206
0 2883.18 619.07
0 0 1425 2.5(深度的最小、最大范围值)原代码的深度顺序是先小后大
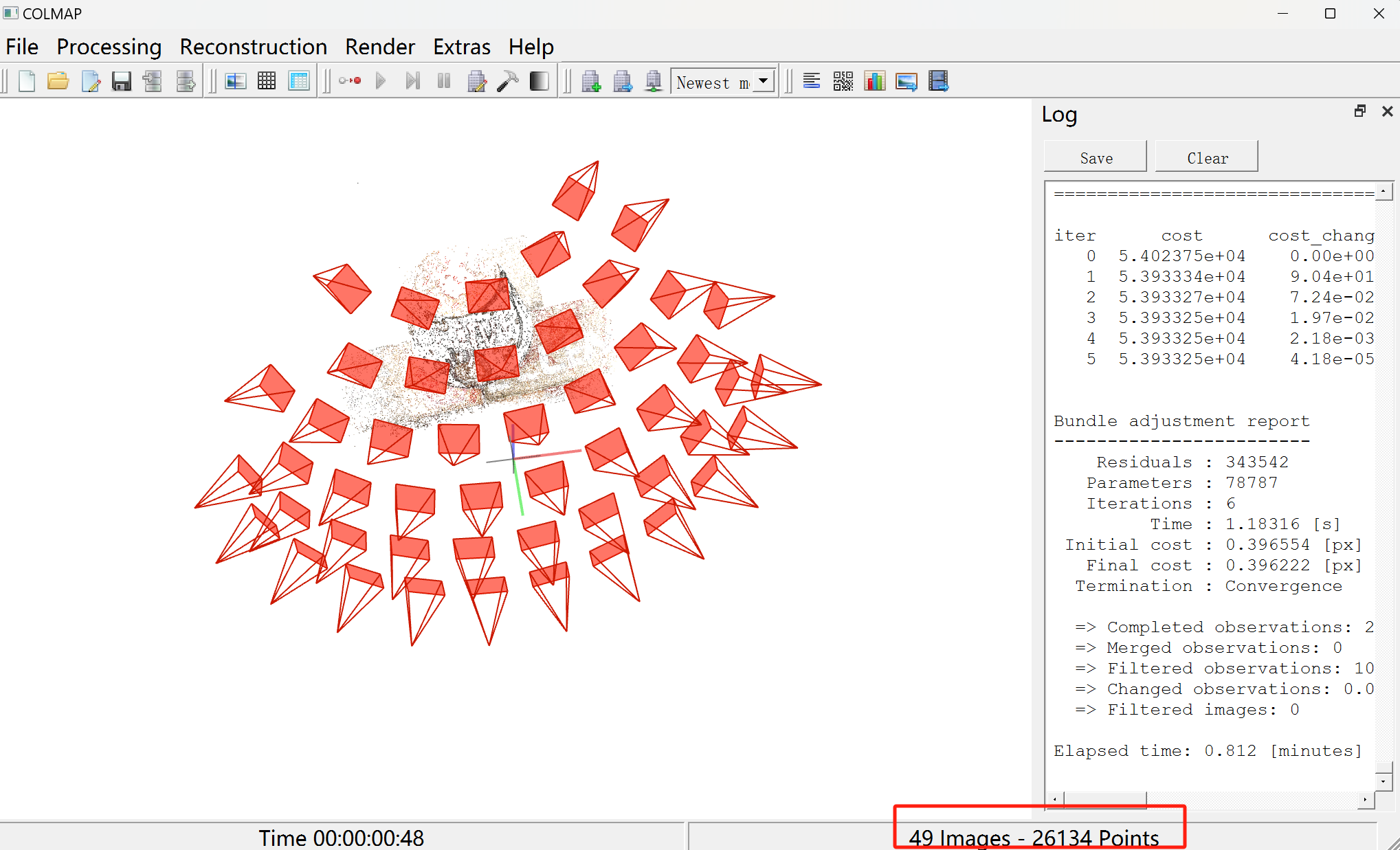
(2)使用COLMAP软件(使用方法自查)观察物体scan1的拍摄形式如下图所示 ,其中包含49张帽子图片,故在49个摄像位置进行拍摄,抓取特征点并匹配,重建产生26134个点的稀疏点云:
(3)训练的数据目录结构如下形式:
训练数据根目录+---Cameras_1(相机参数)| +---00000000_cam.txt| +---00000001_cam.txt| +---00000002_cam.txt| ......64个相机参数txt文件| +---pair.txt(视图之间重合区域匹配文件(1个))| \---train(内含64个相机参数txt文件)| +---00000000_cam.txt| +---00000001_cam.txt| +---00000002_cam.txt| ......+---Depths_raw(深度图)| +---scan1| +---depth_map_0000.pfm(pfm格式的深度图:宽160*高128)| +---depth_map_0001.pfm| +---depth_map_0002.pfm| +---depth_map_0003.pfm| ......| +---depth_visual_0044.png(png格式的可视化黑白深度图:宽160*高128)| +---depth_visual_0045.png| +---depth_visual_0046.png| +---depth_visual_0047.png| +---depth_visual_0048.png| ......| +---scan2| +---scan3| +---scan4| +---scan5| +---scan6| +---scan7| \---scan8\---Rectified+---scan1_train+---rect_001_0_r5000.png+---rect_001_1_r5000.png+---rect_001_2_r5000.png....+---scan2_train+---scan3_train+---scan4_train+---scan5_train+---scan6_train+---scan7_train\---scan8_train
这里举例了8个物体的的数据内容,一个G大小供下载测试,下载链接,其中包含两个测试数据,测试数据目录结构如下:
测试数据根目录
+---scan1
| +---cams(64个相机内外参,深度范围)
| +---cams_1(64个相机内外参,深度范围)
| +---images(49张多视角拍摄图片:宽1600*高1200)
| \---pair.txt(视图之间重合区域匹配文件(1个))
\---scan4+---cams+---cams_1\---images
测试数据与训练数据不同之处有二:
1、图片的尺寸变大了;2、不需要深度图,深度图需要使用训练好的模型计算得到,最终产生点云.ply文件.
作者将所有scan数据划分训练、验证、测试集,并放在lists文件夹中的不同的txt文件中,目录如下:
lists├─dtu│ all.txt│ test.txt│ train.txt│ val.txt
3 训练PatchMatchNet
3.1 输入参数
举例几个重要参数
"--trainpath",default="D:/AlgorithmFile/3DCoronaryTreeReconstruction/PatchmatchNet/sourceCode/PatchmatchNet-main/data/mini_dtu/train/", help="训练集的路径"(自定义)
"--epochs", type=int, default=16, help="训练轮数"(自定义)
"--batch_size", type=int, default=1, help="训练一批次的大小"(自定义)
"--loadckpt", default=None, help="加载一个特定的断点文件"(默认无)
"--parallel", action="store_true", default=False, help="如果设置,使用并行,这可以防止导出TorchScript模型."
"--patchmatch_iteration", nargs="+", type=int, default=[1, 2, 2], help="patchmatch模块在stages 1,2,3的自迭代次数"
"--patchmatch_num_sample", nargs="+", type=int, default=[8, 8, 16],help="在stages 1,2,3局部扰动的产生的样本数量"
"--patchmatch_interval_scale", nargs="+", type=float, default=[0.005, 0.0125, 0.025], help="在逆深度范围内生成局部扰动样本的归一化区间"
"--patchmatch_range", nargs="+", type=int, default=[6, 4, 2],help="补丁匹配在阶段1,2,3上传播的采样点的固定偏移")
"--propagate_neighbors", nargs="+", type=int, default=[0, 8, 16],help="自适应传播在阶段1,2,3上的邻居数目"
"--evaluate_neighbors", nargs="+", type=int, default=[9, 9, 9],help="第1、2、3阶段自适应评价的自适应匹配代价聚合的邻居个数"
3.2 制定数据集加载方式
# dataset, dataloader
train_dataset = MVSDataset(args.trainpath, args.trainlist, "train", 5, robust_train=True)
test_dataset = MVSDataset(args.valpath, args.vallist, "val", 5, robust_train=False)TrainImgLoader = DataLoader(train_dataset, args.batch_size, shuffle=True, num_workers=8, drop_last=True)
TestImgLoader = DataLoader(test_dataset, args.batch_size, shuffle=False, num_workers=4, drop_last=False)
输入:训练集的路径,训练集的train.txt列表,训练模式,待计算的5张邻域图像数(最多10张图),鲁棒性训练(在10张图中随机选择5张无序的)
MVSDataset函数的功能:
1、设定阶段数为4
2、读取训练集的列表
3、设置一个空列表metas存放【不同scan,不同光照下的light_idx索引(同一角度共有7种光照不同的图),不同的参考图ref,对应的10张邻域图src集合】
4、获取数据的方法:首先,读取一个metas元素,如果是鲁棒训练,则参考图ref+随机从10张邻域图中选择5张,否则参考图ref+顺序选前5张邻域图。
接着,
(1)从Rectified文件夹中读取校正的(宽640x高512)参考图ref和所有src(共6张彩色图,注意参考图的ID是从0-49,对应原图的ID:1-49,故读取原图是ID+1)
(2)从Depths_raw文件夹中读取深度可视化png图(宽160x高128)参考图ref和所有src(共6张彩色图),从Depths_raw文件夹中读取深度pfm图(宽160x高128)参考图ref和所有src(共6张彩色图),这两个图的ID跟参考图ID一样从0-48,故不需要加1。
(3) 从Cameras_1文件夹中读取6张不同视角下的相机内外参数和深度范围。
(4)读取的相机内参对应的是较小的图片,而现在需要更大尺寸的图片对应的内参,故需要升高相机内参,这里放大了原来的4倍。
#共六组内外参
intrinsic[:2, :] *= 4.0
intrinsics.append(intrinsic)
extrinsics.append(extrinsic)
相关文章:
【三维重建-PatchMatchNet复现笔记】
【三维重建-PatchMatchNet复现笔记】 1 突出贡献2 数据集描述3 训练PatchMatchNet3.1 输入参数3.2 制定数据集加载方式 1 突出贡献 在计算机GPU和运行时间受限的情况下,PatchMatchNet测试DTU数据集能以较低GPU内存和较低运行时间,整体误差位列中等&#…...

CSS - 常用属性和布局方式
目录 前言 一、常用属性 1.1、字体相关 1.2、文本相关 1.3、背景相关 1.3.1、背景颜色 1.3.2、背景图片 1.4、圆角边框 二、常用布局相关 2.1、display 2.2、盒子模型 2.2.1、基本概念 2.2.2、border 边框 2.2.3、padding 内边距 2.2.4、margin 外边距 2.3、弹…...
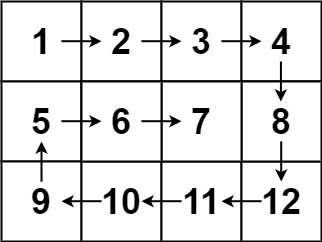
数据结构与算法之矩阵: Leetcode 134. 螺旋矩阵 (Typescript版)
螺旋矩阵 https://leetcode.cn/problems/spiral-matrix/ 描述 给你一个 m 行 n 列的矩阵 matrix ,请按照 顺时针螺旋顺序 ,返回矩阵中的所有元素。 示例 1 输入:matrix [[1,2,3],[4,5,6],[7,8,9]] 输出:[1,2,3,6,9,8,7,4,5]示…...

LVS+keepalived高可用负载均衡集群
keepalived介绍 keepalived为LVS应运而生的高可用服务。LVS的调度器无法做高可用,于是keepalived这个软件。实现的是调度器的高可用。 但是keepalived不是专门为LVS集群服务的,也可以做其他代理服务器的高可用。 LVS高可用集群的组成 主调度器备调度器&…...
解密Kubernetes:探索开源容器编排工具的内核
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
苹果手机怎么设置壁纸?解锁设置壁纸的2种方法!
手机壁纸便是我们常说的屏幕背景图,一张好看的手机壁纸能使我们的心情变得愉悦。这个壁纸可以是风景、美食、喜欢的偶像、自己养的宠物,或者是你的家人、朋友。 拥有特殊含义的照片会更让人想要设置成壁纸。苹果手机怎么设置壁纸?本文将给大…...
解决LOGITECH 罗技驱动 MAC版出现的一些问题汇总!
安装前将之前的安装文件清理干净!!!!! 罗技驱动最新安装包下载 我的鼠标是G304 1. 驱动安装一直卡在99% 运行官方下载的安装程序,卡住后关掉窗口。 在终端中执行以下命令: sudo /Users/用户名…...
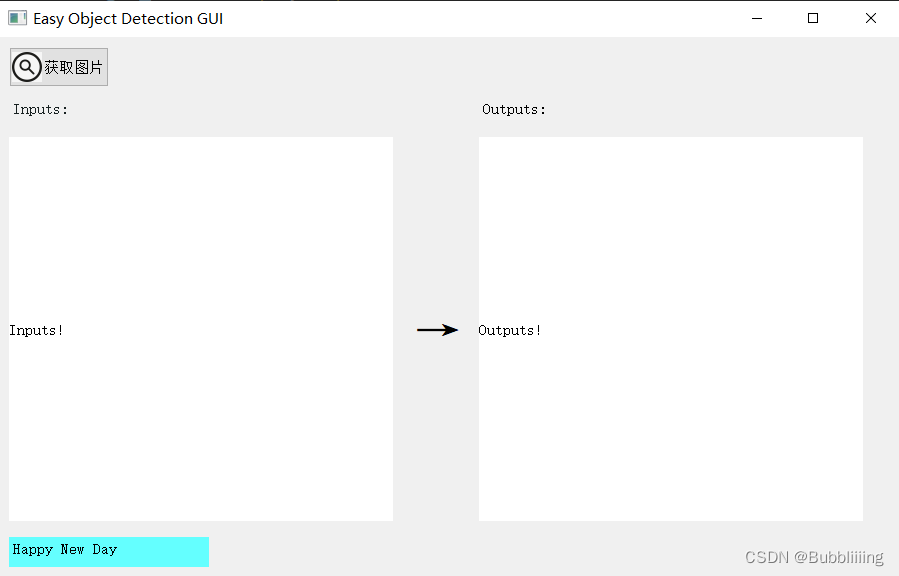
PyQt5入门4——给目标检测算法构建一个简单的界面
PyQt5入门4——给目标检测算法构建一个简单的界面 学习前言要构建怎么样的界面实例使用1、窗口构建a、按钮:获取图片b、Inputs、Outputs文本提示c、Inputs、Outputs图片显示d、箭头显示e、整点祝福 2、主程序运行 全部代码 学习前言 搞搞可视化界面哈,虽…...

Pandas数据分析系列9-数据透视与行列转换
Pandas 数据透视表 当数据量较大时,为了更好的分析数据特征,通常会采用数据透视表。数据透视表是一种对数据进行汇总和分析的工具,通过重新排列和聚合原始数据,可以快速获得更全面的数据洞察。数据透视表在Excel中也是经常使用的一个强大功能,在Pandas模块,其提供了pivot…...
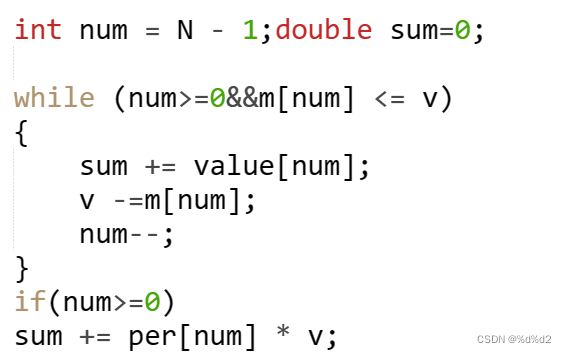
部分背包问题细节(贪心)
有一种情况是,背包可以把金币全部拿走: 如果num小于0则返回值...
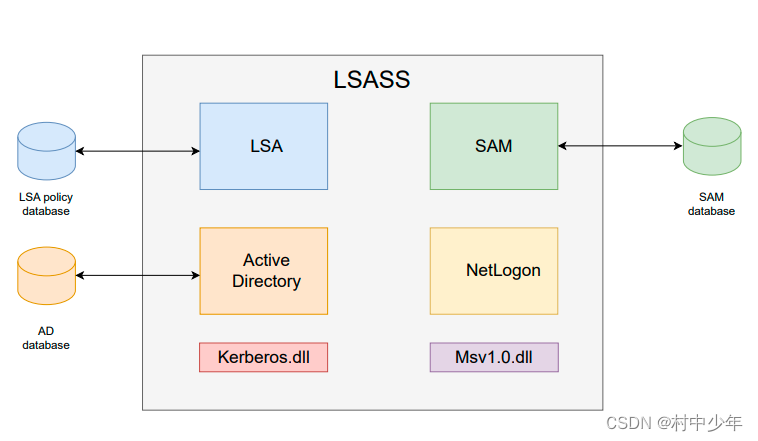
windows协议详解之-RPC/SMB/LDAP/LSA/SAM域控协议关系
如果你在windows域控环境中,例如企业的网络中开启wireshark抓包,你一定会遇到一大堆各种各样的协议。不同于互联网服务(大多基于HTTP),为了实现域控中各种各样的服务,windows的域控环境中采用了非常多的协议…...

uniapp中 background-image 设置背景图片不展示问题
有问题 <view class"file-picker__box jsz" tap"jszxszUpload(jsz)"></view>.jsz {background-image: url(../../static/example_drive.png); }解决1 <view class"file-picker__box jsz" :style"{ background-image: url(…...

Elasticsearch打分机制
一 例子 xx搜索引擎,就搜索结果本身而言,xx返回了正确的结果。因为返回的结果中,都包含了搜索的关键字。而我们从逻辑上来看,这一堆广告算是咋回事!这个吐槽是从用户的角度出发的。很显然,返回的结果中,尤其是前几条,有时甚至是前几页,都跟我们想要的结果相差深远! …...
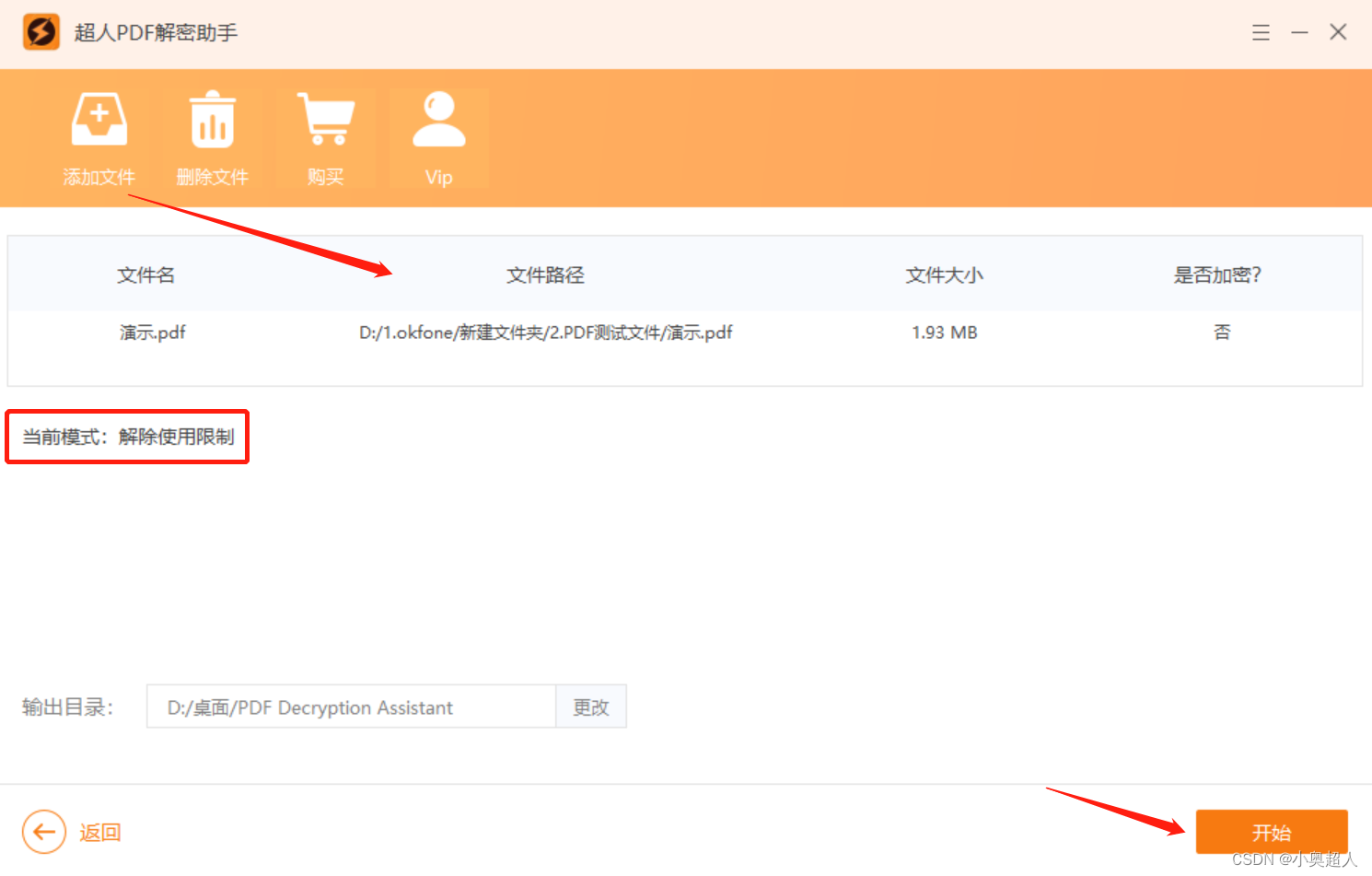
【pdf密码】为什么我的PDF文件不能复制文字?
大家现在接触PDF文件越来越多,有的时候在网上下载的PDF文件打开之后,发现选中文字之后无法复制。甚至其他功能也都无法使用,这是怎么回事?该怎么办? 当我们发现文件打开之后,编辑功能无法使用,很…...

vim程序编辑器
最近读书读完感觉没有读一样,所以决定写笔记记录下 vi的使用包括三种模式 一般模式 编辑模式 a,i,o,r,A,I,O,R 用来插入或者替换内容 命令行模式 :wq保存退出:wq!强制保存退出…...

新手如何学习挖漏洞?看这篇就够了【网络安全】
什么是漏洞挖掘 漏洞挖掘是指通过分析软件、系统或网络中存在的安全漏洞来发现并利用这些漏洞。漏洞挖掘是信息安全领域的一项重要工作,可以帮助企业和组织提高系统的安全性,避免黑客攻击和数据泄露。 漏洞挖掘的流程一般可以概括为以下几个步骤&#x…...

CentOS 7.8 kubeadm安装 k8s 1.26
CentOS 7.8 kubeadm安装 k8s 1.26 规划 集群 主机名IP地址k8s-master01192.168.200.101k8s-master02192.168.200.102k8s-master03192.168.200.103k8s-node01192.168.200.201k8s-node02192.168.200.202 VIP(虚拟IP) 192.168.200.80 Harbor http://192.168.200.50 基础 …...

成都瀚网科技有限公司抖音小店:创新营销引领电商潮流
在当今数字化时代,抖音作为一款备受欢迎的短视频平台,不仅吸引了大量用户的关注,还为众多电商企业提供了新的销售渠道。成都瀚网科技有限公司抖音小店便是其中之一,凭借其独特的营销策略和优质的产品,成为了抖音电商领…...
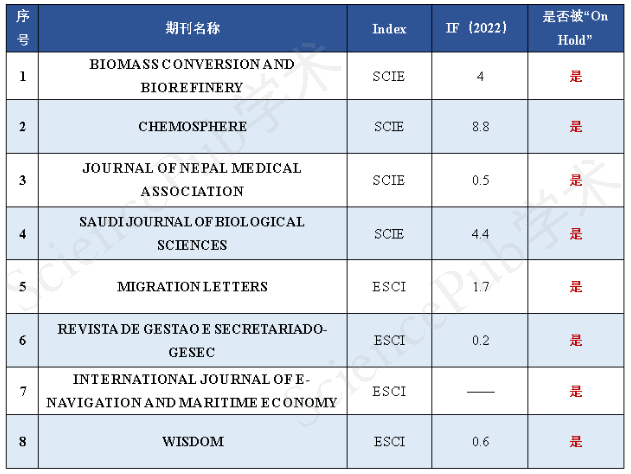
警惕!又2本期刊被“On Hold”!
【SciencePub学术】 此前,继一本SSCI期刊被取消“On hold”标识后,仍处于“On Hold”状态的期刊有6本,其中包括4本SCI期刊和2本ESCI期刊。近日,经小编查询,又新增2本“On Hold”期刊,详情如下:…...

一台服务器成了哆啦A梦的神奇口袋
如果我有一台服务器,那简直就像打开了哆啦A梦的神奇口袋!可以做的事情可太多啦,比如: 学习和探险 首先嘛,当然是用来学习和探险啦!我可以安装和配置各种操作系统、编程语言和工具,深入了解计…...

龙芯2K3000与国产OS在轨道交通AFC系统中的工程实践
1. 项目概述:当国产芯遇上城市动脉每天早晚高峰,地铁站里人头攒动,闸机开合的“嘀嘀”声此起彼伏。你可能没留意,支撑这套庞大自动售检票系统(AFC)稳定运行的“大脑”,正经历一场静默而深刻的变…...

LLaMA论文里没细说的三个“小”改进:RMSNorm、SwiGLU和RoPE到底强在哪?
LLaMA模型三大底层优化技术解析:RMSNorm、SwiGLU与RoPE的设计哲学 当大多数人关注大语言模型的参数量级时,LLaMA团队却在微观架构层面做了一系列精妙改进。这些看似微小的技术选择,实则是支撑模型高效运行的关键支柱。本文将带您深入LLaMA的&…...

为什么92%的开发者查不到真正“实时”新闻?Perplexity底层时间戳校验机制首度公开
更多请点击: https://intelliparadigm.com 第一章:为什么92%的开发者查不到真正“实时”新闻?Perplexity底层时间戳校验机制首度公开 当开发者在凌晨三点搜索“React 19 正式发布”,返回结果却显示“发布时间:2024-03…...

2026生鲜零售收银软件推荐:四大主流方案深度对比
开一家生鲜店,最让人头疼的往往不是进货渠道或选址,而是每天高峰期那台“卡住”的收银机。想象一下,周末傍晚顾客排成长龙,称重员手忙脚乱地输入代码,屏幕转圈加载,后面的顾客开始不耐烦地催促,…...

突发外交事件3分钟响应!Perplexity国际新闻搜索应急配置清单,含12条预设Prompt与可信度评分模型
更多请点击: https://kaifayun.com 第一章:突发外交事件3分钟响应!Perplexity国际新闻搜索应急配置清单,含12条预设Prompt与可信度评分模型 面对突发外交事件(如边境冲突升级、高层会谈临时取消、制裁公告突袭发布&am…...

Wireshark 和 tcpdump 到底怎么选?一线排障中抓包工具的适用场景、边界与判断标准
Wireshark 和 tcpdump 到底怎么选?一线排障中抓包工具的适用场景、边界与判断标准 很多团队一遇到网络慢、连接断续、接口超时,第一反应就是“先抓包”。问题是:抓包不是答案,抓什么、在哪抓、用什么工具抓,才决定你能…...

基于QT5的串口上位机开发:从零实现数据收发与可视化
1. 项目概述:为什么我们需要自己动手写串口上位机?在嵌入式开发、工业控制、物联网设备调试这些领域,串口通信就像设备与电脑之间最古老也最可靠的“方言”。你可能用过各种现成的串口调试助手,它们功能强大,但当你需要…...
)
从手机充电器到新能源汽车:拆解‘电感’在开关电源中的核心戏份(以Buck电路为例)
从手机充电器到新能源汽车:拆解‘电感’在开关电源中的核心戏份(以Buck电路为例) 当你的手机充电器在半小时内将电量从20%充至80%时,背后隐藏着一个不为人知的能量调度大师——电感。这个看似简单的线圈组件,实则是现…...
)
【中科院研究所主办、高录用、往届会后4个月检索】第二届人工智能与基础模型国际学术会议(AIFM 2026)
第二届人工智能与基础模型国际学术会议(AIFM 2026)将于2026 年 6 月 26-28 日在中国乌鲁木齐举办。会议旨在汇聚来自世界各地学术界、产业界及政府机构的专家学者,围绕人工智能与基础模型技术的核心议题展开深度研讨,共同探索领域…...

CNC木质树莓派外壳制作:从设计到加工的全流程实践
1. 项目概述:当数字制造遇上经典木艺 给树莓派找个“家”,这事儿我干过不少。从3D打印的塑料壳到亚克力板拼的“鱼缸”,总觉得差点意思。塑料感太强,亚克力又显得冰冷。直到有一次在工作室里看到一块边角料的硬枫木,纹…...