LIO-SAM算法解析
文章目录
- 简介
- 算法概述
- 1.点云去畸变
- 1.1 主要功能
- 1.2 主要流程
- 2.特征提取
- 3.IMU预积分
- 4.地图优化
- 5.算法评估
简介
LIO-SAM在lego-loam的基础上新增了对IMU和GPS的紧耦合,采用一个因子图对位姿进行优化,包括IMU因子,激光里程计因子,GPS因子、回环因子。
虽然在创新点上没什么让人觉得有趣的东西,但是在性能上相比Lego-Loam,因为加入了高频的IMU,在一些不好的场景下表现要更鲁棒,回环处的漂移也更小。
不过虽然加入了IMU,但似乎连松耦合都称不上,IMU预积分在LIO-SAM中的作用仅用来对激光点云做运动补偿去畸变,以及在scan-2-map时提供优化的初始位姿
综上,算是一个比较不错的入门算法吧。
参考链接: https://zhuanlan.zhihu.com/p/614039247
算法概述
算法输入: 激光点云,IMU原始数据,GPS(可选)
主要模块:
- 点云去畸变:对应
imageProjection.cpp - 特征提取:对应
featureExtraction.cpp - IMU预积分:对应
imuPreintegration.cpp - 地图优化:对应
mapOptmization.cpp

1.点云去畸变
相比于Lego-Loam,这里没有对点云进行分割和聚类操作,而是直接去畸变后将点云以及对应的位姿发布给特征提取模块。
1.1 主要功能
- imageProjecttion的主要功能是订阅原始点云数据和imu数据,根据高频的imu信息对点云成像时雷达的位移和旋转造成的畸变进行校正
- 同时,在发布去畸变点云的时候加入IMU输出的角度和IMU里程计(imuPreintegration)的角度和位姿作为该帧的初始位姿,作为图优化的初始估计
- 并且,要对点云的Range进行计算,同时记录每个点的行列,以便在特征提取中被使用
1.2 主要流程
- 接收到一帧点云
- 从IMU原始数据队列找到该帧点云时间戳对应的数据,将IMU的roll、pitch、yaw塞进准备发布的该帧点云信息
- 提取该帧点云的起止时间戳(激光雷达点云的每个点都有相对于该帧起始时间的时间间隔)
- 对起止时间内的IMU数据进行角度积分,得到该帧点云每个时刻对应的旋转。
注意,这里算法使用的是简单的角度累加,实际上是积分的近似,但是在很短的时间内,10Hz雷达对应100ms的扫描时间,近似的累加可以代替角度积分。
猜想这里是因为点云去畸变是整个SLAM流程的入口,要保证足够的实时性,因此用累加代替真正的角度积分 - 遍历该帧点云每个点,旋转到起始点坐标系
- 从IMU里程计提取该帧点云对应的位姿(包括位置和旋转),塞进准备发布的该帧点云信息
- 发布该帧点云信息
2.特征提取
- 接收到从imageProjection中发布出的一个去畸变点云信息cloudInfo(自定义格式)
- 对每个点计算曲率。计算时是计算周围点的平均距离用来作为曲率的替代
- 标记遮挡点和与激光平行的点,后续这些点不能采纳为特征点
- 特征提取。分别做角点(曲率大)和平面点(曲率小)特征点提取
- 整合信息,发布完整数据包
过程同Lego-Loam,详细见博客《Lego-Laom算法深度解析》
3.IMU预积分
和VIO常见算法不同,LIO-SAM是通过激光里程计矫正IMU的累计误差,然后对IMU原始数据进行连续积分得到关于IMU的里程计,然后根据IMU的实时积分结果对激光点云进行运动补偿,实现对点云的去畸变。
4.地图优化
- 读取特征提取模块的线特征和平面特征,以及由IMU预积分提供的初始位姿
- 基于初始位姿和局部地图进行scan-2-map的匹配得到矫正后位姿
- 将矫正后位姿加入因子图进行优化,得到里程计位姿
- 同时,会进行回环检测,检测到回环后作为新的因子加入优化,更新局部地图关键帧位姿
- 同时,如果存在GPS信息,会将其加入因子图一起进行优化
5.算法评估
论文中的对标基线是LOAM,下面的链接对LOAM系列的几个算法做了比较详细的评测,整体上LIO-SAM的稳定性较好因为加入了IMU,回环处的漂移较小
https://github.com/Tompson11/SLAM_comparison
相关文章:
LIO-SAM算法解析
文章目录 简介算法概述1.点云去畸变1.1 主要功能1.2 主要流程 2.特征提取3.IMU预积分4.地图优化5.算法评估 简介 LIO-SAM在lego-loam的基础上新增了对IMU和GPS的紧耦合,采用一个因子图对位姿进行优化,包括IMU因子,激光里程计因子,…...

vscode 提升小程序开发效率的必备插件与工具
1,微信小程序开发助手(WeChat Snippet):提供了小程序代码片段、模板和快速生成页面的功能,加快了开发速度。 2,小程序助手(Minapp):提供了小程序项目创建、编译、预览和…...

第五章单元测试
一、学习目的与要求 本章对单元测试进行了详细的介绍。通过本章的学习,应掌握单元测试的概念,了解单元测试的误区,掌握单元测试的策略、分析方法和用例设计方法。 二、考核知识点与考核目标 (一)单元测试的概念&#…...

【JAVA基础】多线程与线程池
多线程与线程池 文章目录 多线程与线程池1. 相关概念1.1 线程调度1.2 守护线程 2. 生命周期3. 同步机制/同步锁3.1 synchronized3.2 lock3.3 synchronized 与 Lock 的对比 4. 死锁5. 线程通信5.1 线程间的通信5.2 等待唤醒机制5.3 举例5.4 调用 wait 和 notify 需注意的细节5.5…...
HCIA数据通信——交换机(Vlan间的通信与安全)
前言 之前的提到了交换机的概念和实验。不过交换机的一些功能还没有说完,我们的实验也仅仅是阻止相同地址段的IP地址互通,也没有用到子接口和路由器。显然,那样的配置过于简单。 端口安全 Port Security(端口安全)的功…...
Linux shell编程学习笔记16:bash中的关联数组
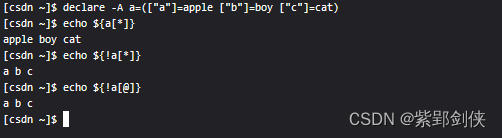
上一节我们探讨了普通的数组,即使用数字下标来索引数组中不同的元素的数组,也可以称之为索引数组。 相比纯粹的数字,字符串不仅能表明含义,也更便于记忆使用,于是就有了关联数组。 一、关联数组概述 bash 从4.0开始支…...

浏览器是怎么执行JS的?——消息队列与事件循环
看完渡一的课后,感觉这块内容确实非常重要,写 JS 的连 JS 的执行原理都不知道可不行。 事件循环 在写 JS 的时候,你有没有想过 JS 是按照什么顺序执行的?浏览器是怎么执行 JS 代码的?为什么有时候代码没有按照我们认为…...

IMU预积分的过程详解
一、IMU和相机数据融合保证位姿的有效性: 当运动过快时,相机会出现运动模糊,或者两帧之间重叠区域太少以至于无法进行特征匹配,所以纯视觉SLAM对快速的运动很敏感。而有了IMU,即使在相机数据无效的那段时间内ÿ…...

TypeScript中的类型运算符
类型运算符 1. keyof运算符 1. 简介 是一个单目运算符,接受一个对象类型作为参数,返回该对象的所有键名组成的联合类型。 type MyObj {foo: number,bar: string, };type Keys keyof MyObj; // foo|bar这个例子keyof MyObj返回MyObj的所有键名组成的…...
【蓝桥杯选拔赛真题03】C++输出字母Y 青少年组蓝桥杯C++选拔赛真题 STEMA比赛真题解析
目录 C/C++输出字母Y 一、题目要求 1、编程实现 2、输入输出 二、算法分析...

redis搭建集群-多实例快速搭建
1.基础的redis.conf的配置 # Redis configuration file example. # # Note that in order to read the configuration file, Redis must be # started with the file path as first argument: # # ./redis-server /path/to/redis.conf# Note on units: when memory size is ne…...

为什么进行压力测试? 有哪些方法?
在信息技术飞速发展的今天,软件系统的性能已经成为了用户满意度的决定性因素之一。而要确保一个系统在实际使用中能够稳定可靠地运行,压力测试就显得尤为关键。本文将深入探讨什么是压力测试,为什么它是如此重要,以及一些常见的压…...

Java开发者必备:支付宝沙箱环境支付远程调试指南
🔥博客主页: 小羊失眠啦. 🔖系列专栏: C语言、Linux、Cpolar ❤️感谢大家点赞👍收藏⭐评论✍️ 文章目录 前言1. 下载当面付demo2. 修改配置文件3. 打包成web服务4. 局域网测试5. 内网穿透6. 测试公网访问7. 配置二级…...
基于STM32温湿度传感器采集报警系统设计
**单片机设计介绍,1648【毕设课设】基于STM32温湿度传感器采集报警系统设计 文章目录 一 概要二、功能设计设计思路 三、 软件设计原理图 五、 程序程序 六、 文章目录 一 概要 这次的设计主要是通过读取DHT11和HCSR04的数值,(Proteus的传感器…...
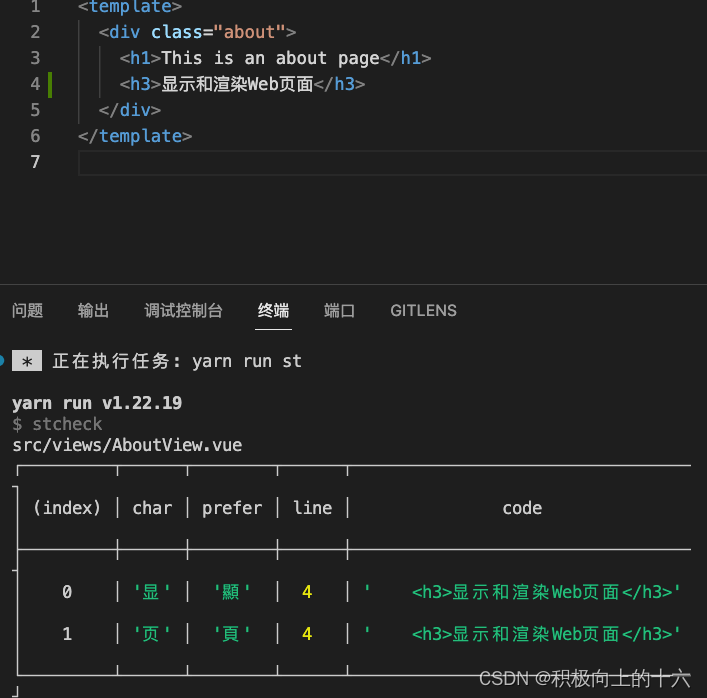
檢測項目簡體字
某些項目可能要求代碼中不允許使用簡體字 安裝stcheck檢查 yarn add stcheck --dev在項目根目錄創建 st.config.json 文件 {"patterns": ["./**/*.(ts|js|tsx|jsx|vue|html)","!**/node_modules/**","!.git/**"],"gitignore&q…...
适用于嵌入式arm的ffmpeg编解码
在嵌入式arm应用开发中,经常会遇到需要处理视频的情况,这时候就需要强大的开源工具ffmpeg出马了。 这里可以下载到各个版本的ffmpeg。 ffmpeg各版本https://www.videohelp.com/software/ffmpeg/old-versions 现在ffmpeg更新较频繁,如…...

nlp与知识图谱代码解读_词嵌入
目录 词嵌入简单原理代码案例解读专业原理介绍场景 词嵌入 简单原理 可以使用一些比喻和生活中的例子: 老师: 你们还记得玩乐高积木的时候,每个积木块代表了一个特定的事物或形状吗?现在,想象一下,每个词…...

HarmonyOS 音频通话开发指导
常用的音频通话模式包括 VOIP 通话和蜂窝通话。 ● VOIP 通话:VOIP(Voice over Internet Protocol)通话是指基于互联网协议(IP)进行通讯的一种语音通话技术。VOIP 通话会将通话信息打包成数据包,通过网络进…...
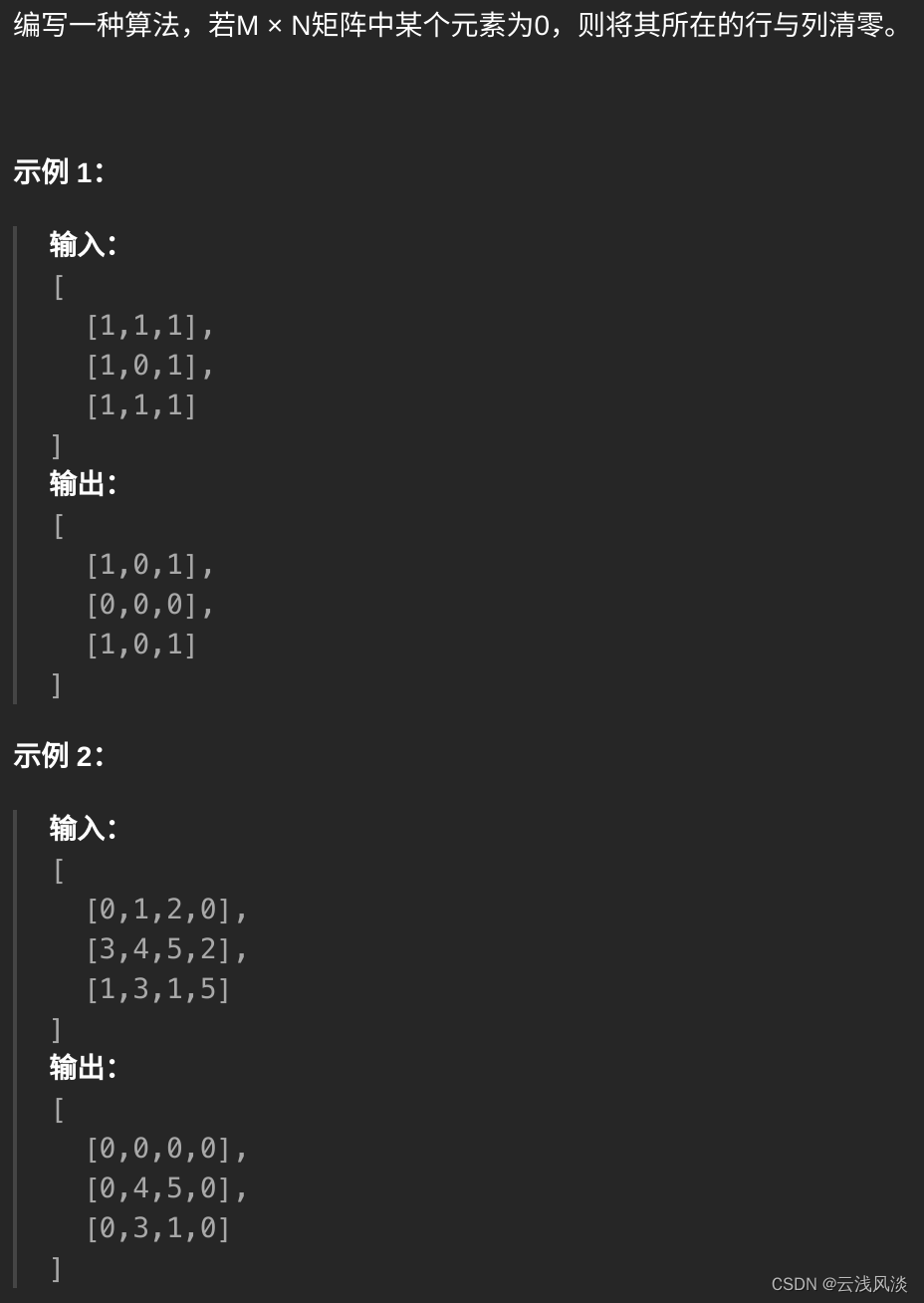
LeetCode讲解篇之面试题 01.08. 零矩阵
文章目录 题目描述题解思路题解代码 题目描述 题解思路 遍历矩阵,若当前元素为零,则将该行和该列的第一个元素置零 遍历第一行,若当前元素为零,则将当前列置零 遍历第一列,若当前元素为零,则将当前行置零 …...
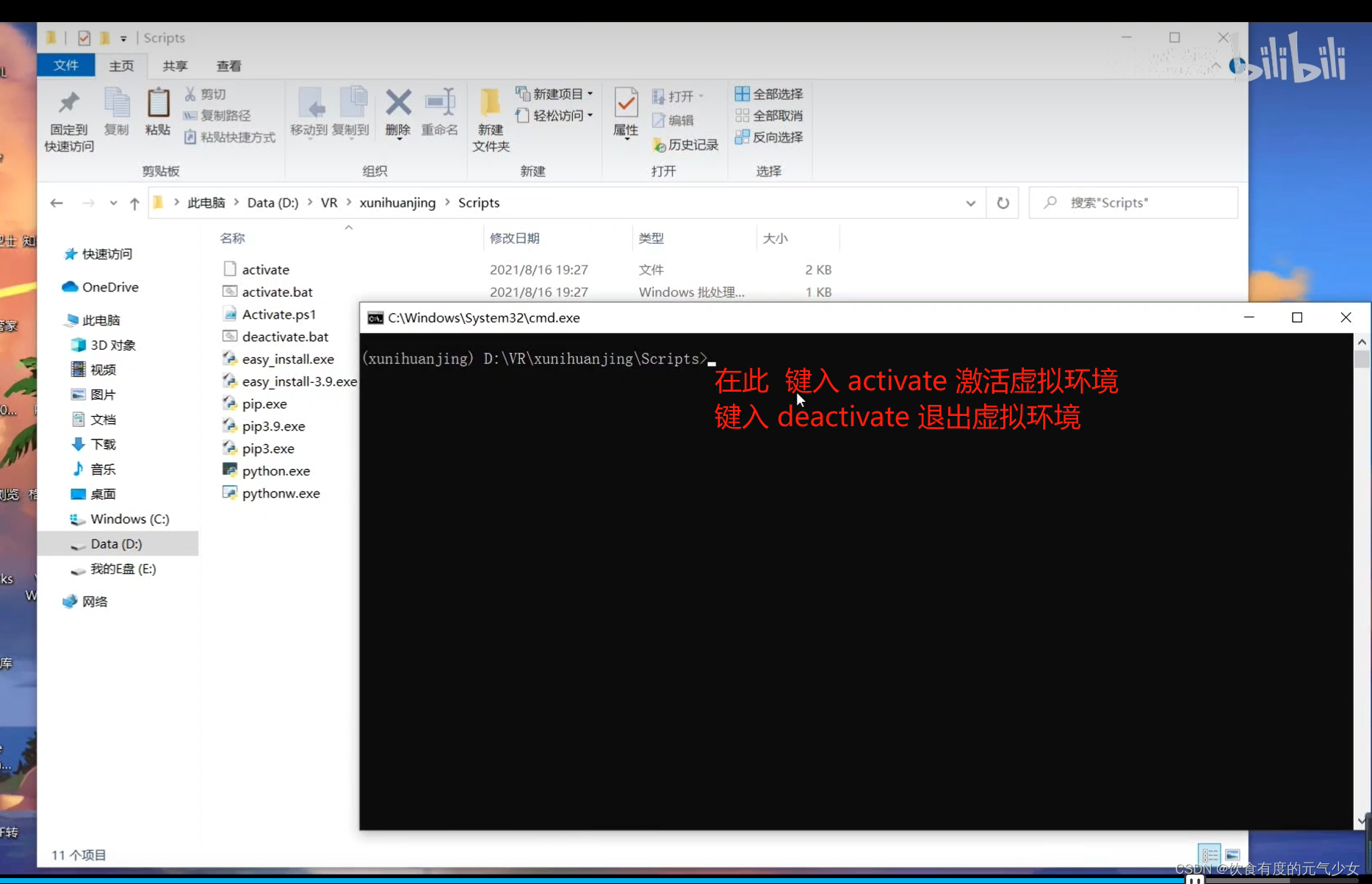
安装python虚拟环境
什么是虚拟环境: 虚拟环境的意义,就如同 虚拟机 一样,它可以实现不同环境中Python依赖包相互独立,互不干扰。 环境准备 安装python (到官网下载Download Python配置环境变量,cmd进入命令行输入 python…...

Kubernetes部署Valheim游戏服务器:云原生架构实践指南
1. 项目概述:当维京英灵殿遇上Kubernetes如果你和我一样,既沉迷于《英灵神殿》(Valheim)里那种与三五好友一起伐木、采矿、建造长屋,然后被巨魔追得满地图跑的原始乐趣,又恰好是一名整天和容器、编排系统打…...

Solidworks PDM二次开发实战:文件夹权限与数据卡配置详解
1. Solidworks PDM二次开发入门指南 如果你正在使用Solidworks PDM管理产品数据,可能会遇到需要批量创建文件夹并设置权限的场景。比如新项目启动时,需要为不同部门创建标准化的文件夹结构,同时设置工程师只读、管理员完全控制的权限规则。手…...

AI量化交易框架解析:从架构设计到实战部署
1. 项目概述:一个AI驱动的加密资产对冲基金框架最近在GitHub上看到一个挺有意思的项目,叫“ai-hedge-fund-crypto”。光看名字,就能感受到一股浓浓的“量化AI加密”的混合气息。这其实是一个开源框架,旨在帮助开发者或量化研究员&…...

Fast-GitHub:打破GitHub访问壁垒的智能加速方案
Fast-GitHub:打破GitHub访问壁垒的智能加速方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 你是否曾因GitHub仓库克…...

GARbro:跨平台视觉小说游戏资源解析与提取工具
GARbro:跨平台视觉小说游戏资源解析与提取工具 【免费下载链接】GARbro Visual Novels resource browser 项目地址: https://gitcode.com/gh_mirrors/ga/GARbro GARbro是一款专门用于解析和提取视觉小说游戏资源文件的跨平台开源工具,支持数百种游…...

AI智能体生态的包管理器:agenticmarket-cli 设计与实践
1. 项目概述:一个面向AI智能体生态的命令行工具如果你和我一样,长期在AI智能体(Agent)这个领域里折腾,那你肯定经历过这样的场景:为了测试一个最新的开源智能体框架,你需要先找到它的GitHub仓库…...

终极免费城通网盘直连解析工具:告别下载限速的完整指南
终极免费城通网盘直连解析工具:告别下载限速的完整指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 还在为城通网盘下载速度慢、等待时间长而烦恼吗?ctfileGet是一款专为城通…...

JVM调优实战:让你的服务性能提升50%
一、背景 线上一个核心订单服务,QPS 3000左右,经常出现接口超时告警。监控显示: 平均RT: 180ms(要求<100ms)Full GC频率: 每天20次,每次STW 1.5sCPU使用率: 峰值85%服务规格: 8C16G,堆内存…...

MCP服务器开发指南:为AI助手构建安全可控的外部工具扩展
1. 项目概述:一个为AI助手赋能的MCP服务器最近在折腾AI应用开发的朋友,可能都绕不开一个词:MCP。全称是Model Context Protocol,你可以把它理解成一套标准化的“插件协议”。它让像Claude、Cursor这类AI助手,能够安全、…...

基于MCP协议构建AI金融数据可视化服务器:从原理到实战部署
1. 项目概述:一个为AI智能体提供实时金融数据可视化的MCP服务器最近在折腾AI智能体(Agent)的生态,发现一个挺有意思的痛点:当你想让AI帮你分析股票、基金或者加密货币时,它往往只能给你干巴巴的数字和文字描…...