7-4、S加减速转动实现【51单片机控制步进电机-TB6600系列】
摘要:本节介绍实现步进电机S曲线运动的代码
一、目标功能
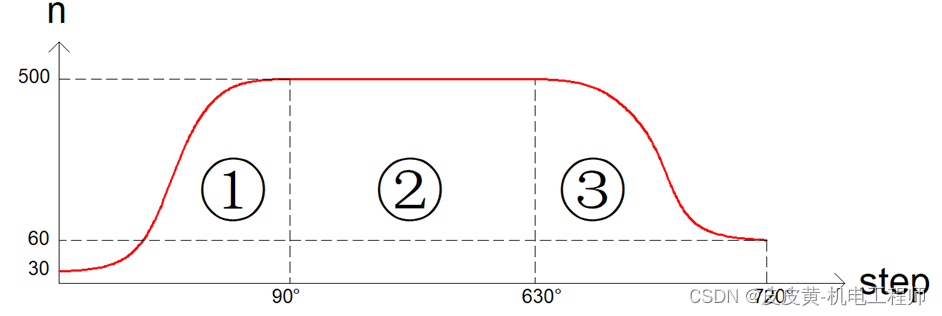
实现步进电机转动总角度720°,其中加减速各90°
加速段:加速类型:S曲线
加速角度:角度为90°
起步速度:30RPM,
终止速度:500RPM
匀速段:匀速角度:角度为540°
匀速速度:500RPM
减速段:减速类型:S曲线
减速角度:角度为90°
起步速度:500RPM
终止速度:60RPM
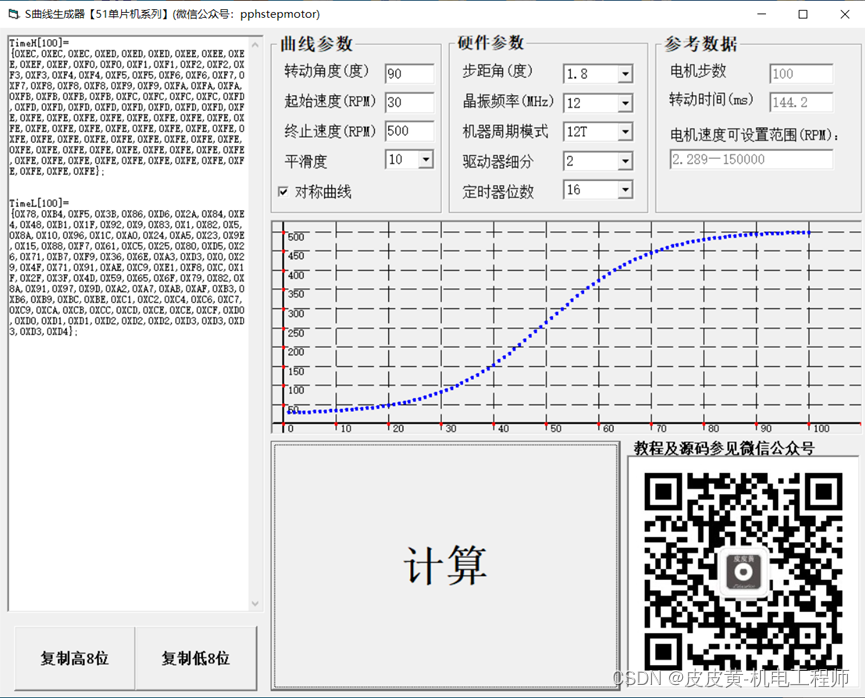
二、生成器计算
加速参数计算
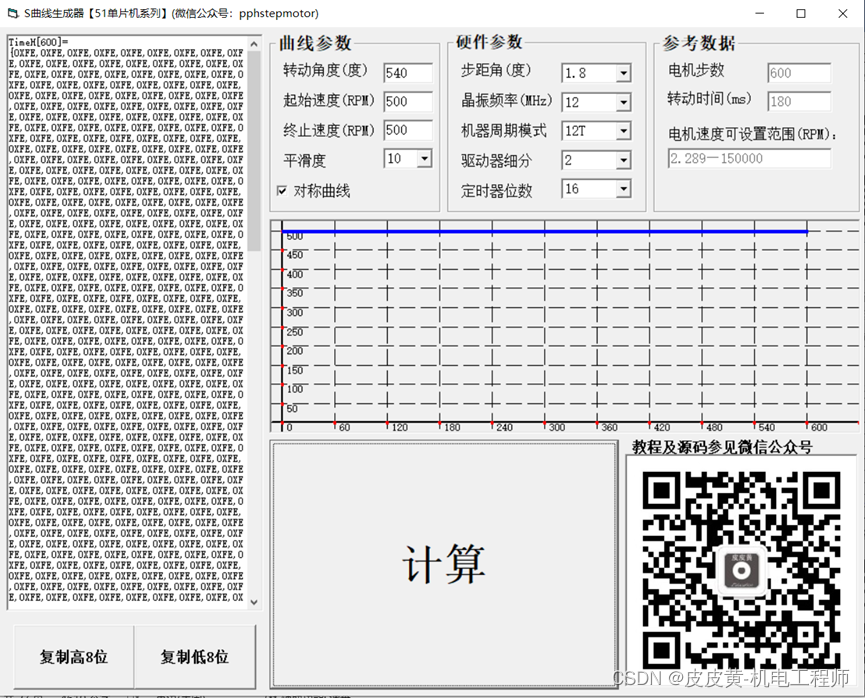
匀速参数计算,主要计算电机步数
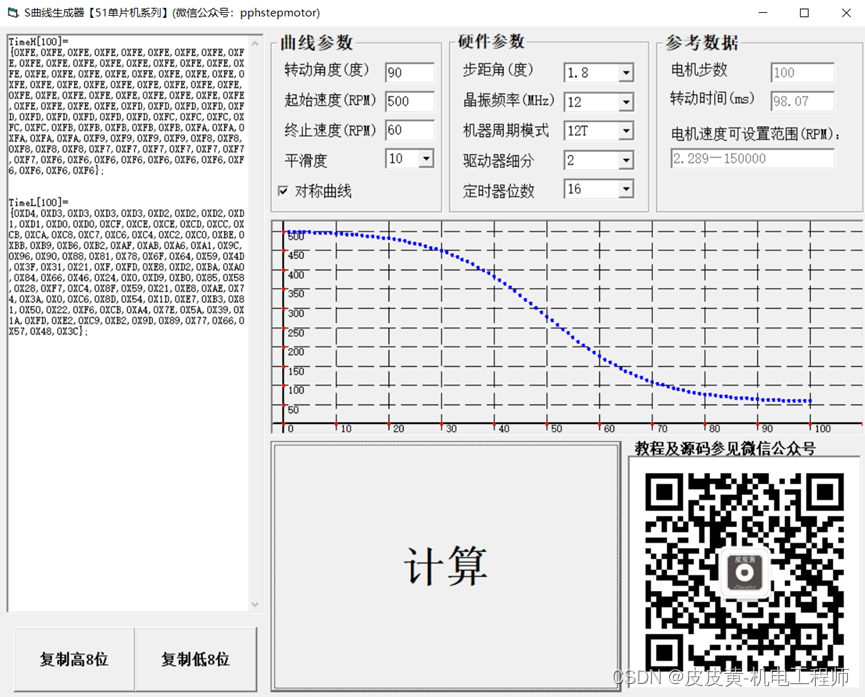
减速参数计算
三、程序代码
//加速、匀速、减速步数
#define step0 100
#define step1 600
#define step2 100unsigned int n=0;//步数计数变量
unsigned int flag=0;//标志位,0:加速段 1:匀速段 2:减速段//加速段90°,30RPM-500RPM
const unsigned char code TimeH0[100]={0XEC,0XEC,0XEC,0XED,0XED,0XED,0XEE,0XEE,0XEE,0XEF,0XEF,0XF0,0XF0,0XF1,0XF1,0XF2,0XF2,0XF3,0XF3,0XF4,0XF4,0XF5,0XF5,0XF6,0XF6,0XF7,0XF7,0XF8,0XF8,0XF8,0XF9,0XF9,0XFA,0XFA,0XFA,0XFB,0XFB,0XFB,0XFB,0XFC,0XFC,0XFC,0XFC,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE};
const unsigned char code TimeL0[100]={0X78,0XB4,0XF5,0X3B,0X86,0XD6,0X2A,0X84,0XE4,0X48,0XB1,0X1F,0X92,0X9,0X83,0X1,0X82,0X5,0X8A,0X10,0X96,0X1C,0XA0,0X24,0XA5,0X23,0X9E,0X15,0X88,0XF7,0X61,0XC5,0X25,0X80,0XD5,0X26,0X71,0XB7,0XF9,0X36,0X6E,0XA3,0XD3,0X0,0X29,0X4F,0X71,0X91,0XAE,0XC9,0XE1,0XF8,0XC,0X1F,0X2F,0X3F,0X4D,0X59,0X65,0X6F,0X79,0X82,0X8A,0X91,0X97,0X9D,0XA2,0XA7,0XAB,0XAF,0XB3,0XB6,0XB9,0XBC,0XBE,0XC1,0XC2,0XC4,0XC6,0XC7,0XC9,0XCA,0XCB,0XCC,0XCD,0XCE,0XCE,0XCF,0XD0,0XD0,0XD1,0XD1,0XD2,0XD2,0XD2,0XD3,0XD3,0XD3,0XD3,0XD4};//减速段90°,500RPM-60RPM
const unsigned char code TimeH2[100]={0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFE,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFD,0XFC,0XFC,0XFC,0XFC,0XFC,0XFB,0XFB,0XFB,0XFB,0XFB,0XFA,0XFA,0XFA,0XFA,0XFA,0XF9,0XF9,0XF9,0XF9,0XF8,0XF8,0XF8,0XF8,0XF8,0XF7,0XF7,0XF7,0XF7,0XF7,0XF7,0XF7,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6,0XF6};
const unsigned char code TimeL2[100]={0XD4,0XD3,0XD3,0XD3,0XD3,0XD2,0XD2,0XD2,0XD1,0XD1,0XD0,0XD0,0XCF,0XCE,0XCE,0XCD,0XCC,0XCB,0XCA,0XC8,0XC7,0XC6,0XC4,0XC2,0XC0,0XBE,0XBB,0XB9,0XB6,0XB2,0XAF,0XAB,0XA6,0XA1,0X9C,0X96,0X90,0X88,0X81,0X78,0X6F,0X64,0X59,0X4D,0X3F,0X31,0X21,0XF,0XFD,0XE8,0XD2,0XBA,0XA0,0X84,0X66,0X46,0X24,0X0,0XD9,0XB0,0X85,0X58,0X28,0XF7,0XC4,0X8F,0X59,0X21,0XE8,0XAE,0X74,0X3A,0X0,0XC6,0X8D,0X54,0X1D,0XE7,0XB3,0X81,0X50,0X22,0XF6,0XCB,0XA4,0X7E,0X5A,0X39,0X1A,0XFD,0XE2,0XC9,0XB2,0X9D,0X89,0X77,0X66,0X57,0X48,0X3C};void main()
{ while(1){}
}//定时器0中断程序
void time0_int() interrupt 1
{//产生一个脉冲PUL=1;_nop_();_nop_();nop_();nop_();PUL=0;n++;//步数加1switch (flag)//判断运动状态{case 0://加速段{if(n==step0)//加速段完成{n=0;flag=1;TH0=TimeH2[0];//装载定时寄存器匀速段初值TL0=TimeL2[0];}else{TH0=TimeH0[n];//装载定时寄存器加速段初值TL0=TimeL0[n];}}break;case 1://匀速段{TH0=TimeH2[0];//装载定时寄存器匀速段初值TL0=TimeL2[0];if(n==step1)//匀速段完成{n=0;flag=2;TH0=TimeH2[n];//装载定时寄存器减速段初值TL0=TimeL2[n];}}break;case 2://减速段{if(n==step2)//减速段完成{n=0;flag=0;TR0=0; //电机停止}else{TH0=TimeH2[n];//装载定时寄存器减速段初值TL0=TimeL2[n];}}break;default:break;}
}
四.总结
通过上述计算,完成S曲线加减速运动。通过调整匀速运动的角度,加减速过程不变,可以实现总转动角度的变化,适用于总转角需要变化且需要较高速度的情况,并且满足总转角应大于加减速转角之和。
对于大多数情况,加减速的过程可以合并,即用S加速的逆过程去实现减速,可以实现代码的简化
五、附件
完整代码工程文件请见微信小程序:

相关文章:
7-4、S加减速转动实现【51单片机控制步进电机-TB6600系列】
摘要:本节介绍实现步进电机S曲线运动的代码 一、目标功能 实现步进电机转动总角度720,其中加减速各90 加速段:加速类型:S曲线 加速角度:角度为90 起步速度:30RPM, 终止速度&#x…...
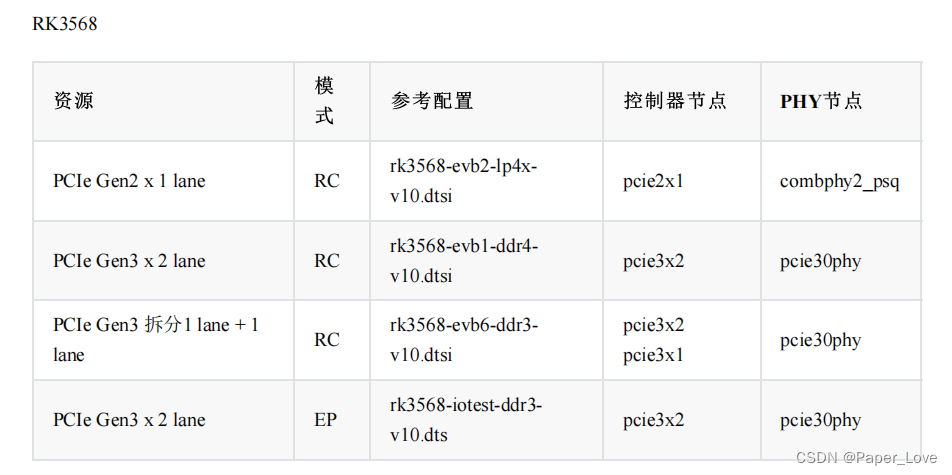
RK3568-pcie接口
pcie接口与sata接口 pcie总线pcie总线pcie控制器sata控制器nvme设备sata设备nvme协议ahci协议m-key接口b-key接口RC模式和EP模式 RC和EP分别对应主模式和从模式,普通的PCI RC主模式可以用于连接PCI-E以太网芯片或PCI-E的硬盘等外设。 RC模式使用外设一般都有LINUX驱动程序,安…...

spring监听请求执行结束,移除当前ThreadLocal数据两种方法
在开发过程中,很多时候我们会使用ThreadLocal来临时缓存数据,当一次数据请求执行完成后需要主动执行释放当前ThreadLocal缓存数据资源,防止未能及时释放导致下一次访问时候ThreadLocal依然保持上一次缓存的数据。 spring提供两种方式去监听一…...

知识图谱--Jena基础操作和检索推理应用
在上一篇读书笔记中讲到知识图谱存储主要有基于开源的Jena方式和基于图数据库(Neo4j)方式,本次主要对Jena的基础操作和如何应用进行了实践总结,同时结合了D2R,将结构化数据转换成Jena可以加载的格式(即RDF,后缀是.nt),Apache Jena作为一种开源的Java语义网框架,主要功…...
)
GEE python——将GEE ASSETS中存储的影像或者矢量转化为数据格式XEE()
数据转换器是内置于 getPixels、computePixels、listFeatures 和 computeFeatures 中的客户端转换能力。通过指定兼容的文件格式,这些方法可以返回 Python 原生格式的数据,如用于栅格的结构化 NumPy 数组和用于矢量的 Pandas DataFrames 或 GeoPandas GeoDataFrames。对于矢量…...

Java集合框架:List、Set、Map类型及泛型详解
文章目录 📕我是廖志伟,一名Java开发工程师、Java领域优质创作者、CSDN博客专家、51CTO专家博主、阿里云专家博主、清华大学出版社签约作者、产品软文创造者、技术文章评审老师、问卷调查设计师、个人社区创始人、开源项目贡献者。🌎跑过十五…...

Ubuntu 安装 docker
一.添加Docker官方GPG密钥 curl -fsSL http://mirrors.aliyun.com/docker-ce/linux/ubuntu/gpg | sudo apt-key add - 如果出现: The program curl is currently not installed. You can install it by typing: sudo apt install curl 先安装 curl : sudo apt inst…...

BUUCTF zip伪加密 1
BUUCTF:https://buuoj.cn/challenges 题目描述: 下载附件,得到一个zip压缩包。 密文: 解题思路: 1、刚开始尝试解压,看到了flag.txt文件,但需要解压密码。结合题目,确认这是zip伪加密&#…...
p5.js 到底怎么设置背景图?
本文简介 点赞 关注 收藏 学会了 在 《p5.js 光速入门》 里我们学过加载图片元素,学过过背景色的用法,但当时没提到背景图要怎么使用。 本文就把背景图这部分内容补充完整,并且会提到在 p5.js 里使用背景图的一些注意点。 背景图的用法…...
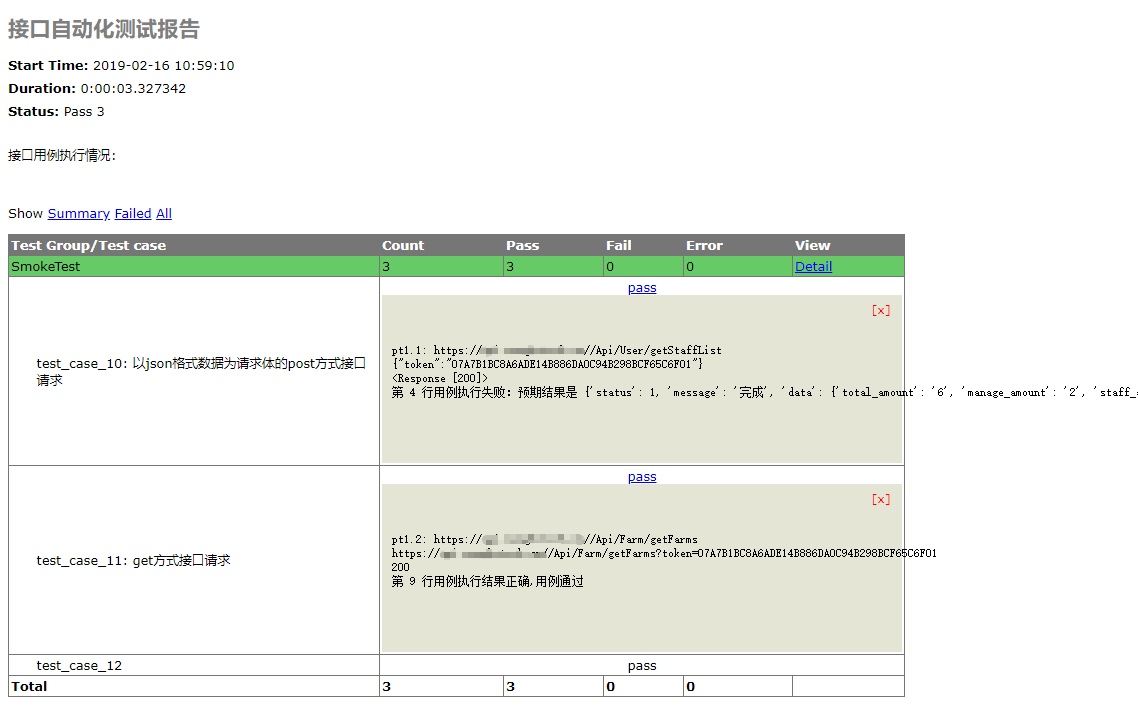
python+unittest+requests+HTMLRunner编写接口自动化测试集
问题描述: 搭建接口测试框架,执行用例请求多个不同请求方式的接口 实现步骤: ① 创建配置文件config.ini,写入部分公用参数,如接口的基本url、测试报告文件路径、测试数据文件路径等配置项 1 [DATABASE] 2 data_addre…...

Vue---监听div元素宽高改变时echart图表重新resize
一、需求描述 当点击上图的红色框时,echart的div元素宽会改变但是无法触发echarts图表的resize重新渲染,对于浏览器而言,浏览器具有window.resize方法监听浏览器窗口大小的改变,而div元素没有监听宽高改变的方法。 二、解决方案 …...

Kubernetes Etcd不可用日志:NOSPACE 的问题修复
两套k8s集群同一天同时出现etcd集群空间超过配额,kubectl get cs时发现所有的etcd均返回503报错,查看etcd的告警发现有NO SPACE的信息且 etcdctl --endpoints${ETCD_ENDPOINT} --cert${ETCD_CERTFILE} --key${ETCD_KEYFILE} --cacert${ETCD_CAFILE} endp…...
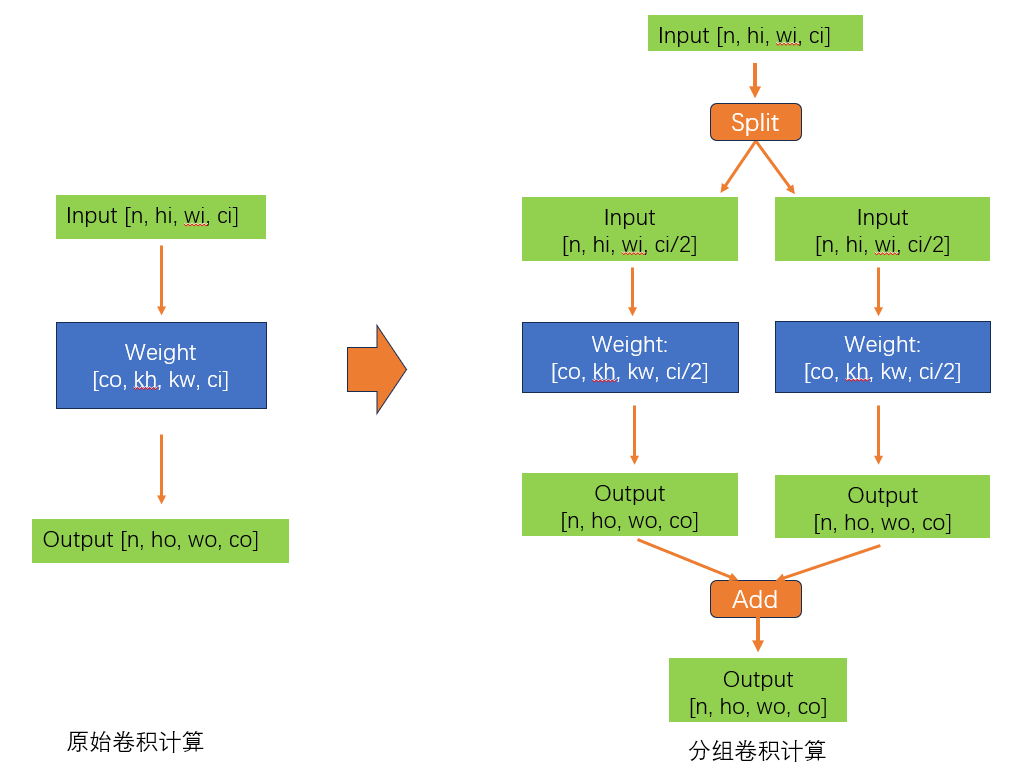
分组卷积的思想神了
大家好啊,我是董董灿。 最近,分组卷积帮我解决了一个大忙,事情是这样的。 这几天遇到一个头疼的问题,就是要在某一芯片上完成一个神经网络的适配,这个神经网络中卷积居多,并且有一些卷积的通道数很大&…...

北邮22级信通院数电:Verilog-FPGA(7)第七周实验(2):BCD七段显示译码器(关注我的uu们加群咯~)
北邮22信通一枚~ 跟随课程进度更新北邮信通院数字系统设计的笔记、代码和文章 持续关注作者 迎接数电实验学习~ 获取更多文章,请访问专栏: 北邮22级信通院数电实验_青山如墨雨如画的博客-CSDN博客 关注作者的uu们可以进群啦~ 一.verilog代码 1.1 …...
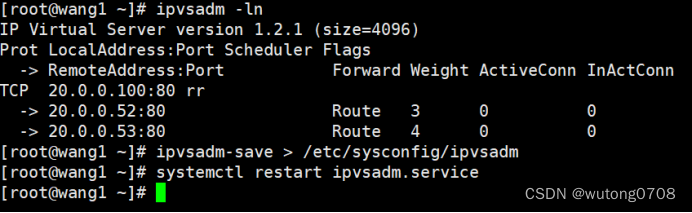
LVS集群-DR模式
概念: LVS-DR模式,也是最常用的lVS负载方式,DR DIRECT ROUTING 直接路由模式 负载均衡器lVS调度器,只负责请求和转发到后端的真实服务器,但是影响结果,由后端服务器直接转发给客户端,不需要经…...

行为型模式-状态模式
在状态模式中,类的行为是基于它的状态改变的。这种类型的设计模式属于行为型模式。 在状态模式中,我们创建表示各种状态的对象和一个行为随着状态对象改变而改变的 context 对象。 意图:允许对象在内部状态发生改变时改变它的行为࿰…...
html/css/javascript/js实现的简易打飞机游戏
源码下载地址 支持:远程部署/安装/调试、讲解、二次开发/修改/定制 视频浏览地址...
ubuntu 22.04安装百度网盘
百度网盘 客户端下载 (baidu.com) 下载地址 sudo dpkg -i baidunetdisk_4.17.7_amd64.deb...
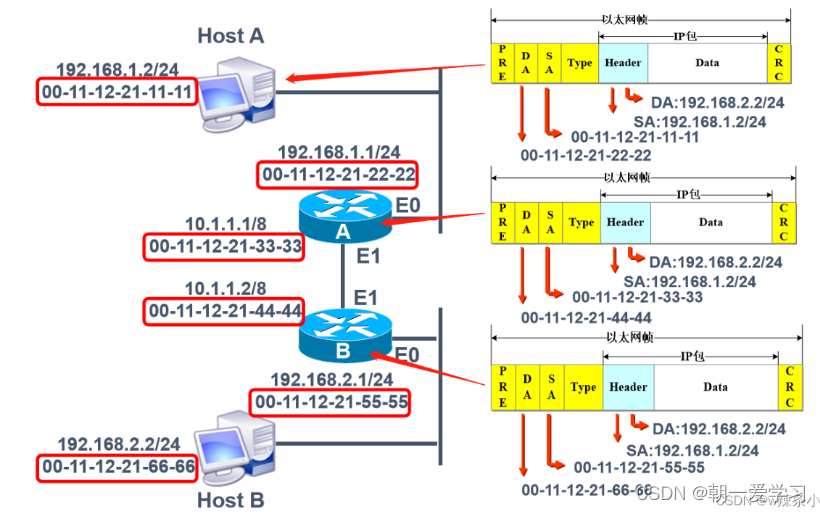
关于路由转发
路由表的作用 路由表的作用:目标网络匹配路由表,从相应网络转发;不匹配路由表,丢弃或转发至默认路由器。 路由转发的原理 根据IP地址找到目标网络,由应路由器解封装查看目标网络是否可达,重新封装进行转…...

oradebug current_sql
CDB 或者PDB都可以,但是数据库sid不对找不到SQL TEXT ps -ef|grep 3485015 oracle 3485015 1 51 21:19 ? 00:01:10 oracle (LOCALNO) oracle 3489325 3488836 0 21:21 pts/0 00:00:00 grep --colorauto 3485015 . oraenv [oracle~]$ s SQL*…...

彻底解决GeoServer跨域:手把手教你配置web.xml与添加Jetty依赖包
彻底解决GeoServer跨域问题:原理剖析与实战配置指南 当你在OpenLayers或Cesium中调用GeoServer的WMS/WFS服务时,是否遇到过令人头疼的跨域错误?这个问题看似简单,却隐藏着Web安全策略与地理信息服务集成的深层逻辑。本文将带你从H…...

FanControl深度实战指南:5分钟精通Windows风扇精准控制
FanControl深度实战指南:5分钟精通Windows风扇精准控制 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/f…...

为什么你的Midjourney胶片图总像数码后期?——从光子散射模型到显影时间算法的底层差异解析
更多请点击: https://intelliparadigm.com 第一章:胶片质感的视觉直觉与认知偏差 胶片质感并非单纯的技术残留,而是一种经由人类视觉系统长期训练形成的感知锚点——它将颗粒噪点、色偏渐变、边缘晕影等非理想光学特征,编码为“真…...

Spoolman:终极3D打印线轴管理解决方案,让您的打印工作更高效 [特殊字符]
Spoolman:终极3D打印线轴管理解决方案,让您的打印工作更高效 🚀 【免费下载链接】Spoolman Keep track of your inventory of 3D-printer filament spools. 项目地址: https://gitcode.com/gh_mirrors/sp/Spoolman Spoolman是一个强大…...

openpilot自动驾驶系统终极指南:从入门到实战的完整教程
openpilot自动驾驶系统终极指南:从入门到实战的完整教程 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Trend…...
)
治理场景数字孪生智慧推演方案(2026完整版)
治理场景数字孪生智慧推演方案(2026完整版) 第1章项目概述 1.1项目背景 数字化、智能化转型是新时代国家治理体系和治理能力现代化建设的核心抓手与必经路径,也是各地政府推进政务提质、基层增效、民生优化的核心工作方向。数字孪生技术作为打通物理治理场景与数字虚拟场景的…...

AutoHotkey V2扩展库:解决Windows自动化开发痛点的完整解决方案
AutoHotkey V2扩展库:解决Windows自动化开发痛点的完整解决方案 【免费下载链接】ahk2_lib 项目地址: https://gitcode.com/gh_mirrors/ah/ahk2_lib AutoHotkey V2扩展库ahk2_lib为Windows自动化开发提供了从简单脚本到专业应用的完整技术栈,通过…...

开发AI助手微服务时利用Taotoken实现模型的热切换与降级
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 开发AI助手微服务时利用Taotoken实现模型的热切换与降级 在构建对外提供AI对话能力的微服务时,服务的稳定性和连续性至…...

矩阵中的“对角线强迫症”:如何优雅地判断Toeplitz矩阵?
举个栗子 🌰 例子1: 矩阵: [6, 7, 8] [4, 6, 7] [1, 4, 6]它的对角线分别是:[6,6,6], [7,7], [8], [4,4], [1],每条对角线上的数字都相同,所以它是Toeplitz矩阵 ✅ 例子2: 矩阵: …...

告别臃肿!G-Helper:华硕笔记本轻量控制中心的终极指南
告别臃肿!G-Helper:华硕笔记本轻量控制中心的终极指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, …...