运用ChatGPT辅助新手学习躺赢者PRO飞控二次开发示例(2023年10月28日)
运用ChatGPT辅助新手学习躺赢者PRO飞控二次开发示例(2023年10月28日)
1、以飞控预设的飞行任务demo中void flight_subtask_1(void)代码为例分析一下变量flight_subtask_cnt的作用?
//逆时针转动90度,完成后降落
void flight_subtask_1(void)
{static uint8_t n = 0;if (flight_subtask_cnt[n] == 0){Flight.yaw_ctrl_mode = COUNTER_CLOCKWISE; // 使用逆时针旋转模式Flight.yaw_ctrl_start = 1;Flight.yaw_outer_control_output = -90; // 逆时针90度OpticalFlow_Control_Pure(0);Flight_Alt_Hold_Control(ALTHOLD_MANUAL_CTRL, NUL, NUL); // 高度控制flight_subtask_cnt[n] = 1;}else if (flight_subtask_cnt[n] == 1){Flight.yaw_ctrl_mode = COUNTER_CLOCKWISE; // 使用逆时针旋转模式Flight.yaw_outer_control_output = 0;OpticalFlow_Control_Pure(0);Flight_Alt_Hold_Control(ALTHOLD_MANUAL_CTRL, NUL, NUL); // 高度控制if (Flight.yaw_ctrl_end == 1) flight_subtask_cnt[n] = 2; // 执行完毕后,切换到下一阶段}else if (flight_subtask_cnt[n] == 2){Flight.yaw_ctrl_mode = ROTATE; // 恢复正常旋转模式Flight.yaw_outer_control_output = RC_Data.rc_rpyt[RC_YAW];OpticalFlow_Control_Pure(0);Flight_Alt_Hold_Control(ALTHOLD_AUTO_VEL_CTRL, NUL, -30); // 高度控制}else{basic_auto_flight_support(); // 基本飞行支持软件}
}flight_subtask_cnt 是一个数组,用于跟踪控制飞行任务的不同阶段。在这段代码中,flight_subtask_cnt 的作用是标记当前任务的执行阶段,以便适时切换到下一阶段或执行不同的飞行操作。具体作用如下:
-
flight_subtask_cnt是一个数组,索引n表示当前任务的编号。不同的任务可以有不同的n值,从而在代码中区分不同的任务。 -
初始阶段,
flight_subtask_cnt[n]被设置为0,表示任务尚未开始执行。 -
在任务的执行过程中,
flight_subtask_cnt[n]的值会随着不同阶段的完成而递增,以表示任务的进度。 -
在代码中通过判断
flight_subtask_cnt[n]的值来确定当前执行哪个任务阶段。例如,当flight_subtask_cnt[n]的值为1时,执行任务的第一个阶段;当flight_subtask_cnt[n]的值为2时,执行任务的第二个阶段,依此类推。 -
当任务的一个阶段完成后,会将
flight_subtask_cnt[n]的值递增,以切换到下一个阶段。在任务的最后一个阶段,通常会执行相应的操作来结束任务。
总之,flight_subtask_cnt 在这段代码中用于管理不同任务的执行阶段,以确保无人机在不同任务之间切换并完成各自的任务。
2、以飞控预设的飞行任务demo中void flight_subtask_5(void)代码为例分析一下变量execute_time_ms的作用?
//机体坐标系下相对位移,正方形轨迹
//右前上分别对应XYZ正方向
void flight_subtask_5(void)
{ static uint8_t n=4;if(flight_subtask_cnt[n]==0){basic_auto_flight_support();//基本飞行支持软件flight_subtask_cnt[n]=1;execute_time_ms[n]=10000/flight_subtask_delta;//子任务执行时间//向前移动100cmHorizontal_Navigation(0,100,0,RELATIVE_MODE,BODY_FRAME);}else if(flight_subtask_cnt[n]==1){basic_auto_flight_support();//基本飞行支持软件if(execute_time_ms[n]>0) execute_time_ms[n]--;if(execute_time_ms[n]==0) {flight_subtask_cnt[n]=2;execute_time_ms[n]=10000/flight_subtask_delta;//子任务执行时间//向右移动100cmHorizontal_Navigation(100,0,0,RELATIVE_MODE,BODY_FRAME);}}else if(flight_subtask_cnt[n]==2){basic_auto_flight_support();//基本飞行支持软件if(execute_time_ms[n]>0) execute_time_ms[n]--;if(execute_time_ms[n]==0) {flight_subtask_cnt[n]=3;execute_time_ms[n]=10000/flight_subtask_delta;//子任务执行时间//向后移动100cmHorizontal_Navigation(0,-100,0,RELATIVE_MODE,BODY_FRAME);}}else if(flight_subtask_cnt[n]==3){basic_auto_flight_support();//基本飞行支持软件if(execute_time_ms[n]>0) execute_time_ms[n]--;if(execute_time_ms[n]==0) {flight_subtask_cnt[n]=4;execute_time_ms[n]=10000/flight_subtask_delta;//子任务执行时间//向左移动100cmHorizontal_Navigation(-100,0,0,RELATIVE_MODE,BODY_FRAME);}}else if(flight_subtask_cnt[n]==4){basic_auto_flight_support();//基本飞行支持软件if(execute_time_ms[n]>0) execute_time_ms[n]--;if(execute_time_ms[n]==0) {flight_subtask_cnt[n]=5;execute_time_ms[n]=10000/flight_subtask_delta;//子任务执行时间//以下还可以继续增加子任务,比如向上移动50cm//Horizontal_Navigation(0,0,50,RELATIVE_FRAME,MAP_FRAME);}}else{basic_auto_flight_support();//基本飞行支持软件}
}
execute_time_ms 的作用是用来跟踪每个飞行子任务的执行时间。在这段代码中,execute_time_ms 主要用于控制子任务的执行时机和切换到下一个子任务。具体作用如下:
-
execute_time_ms是一个数组,用于记录每个飞行子任务的执行时间。数组的每个元素对应一个子任务,索引n表示子任务的编号。 -
在每个子任务的执行过程中,
execute_time_ms[n]的值会递减。这个值通常以毫秒为单位,每递减1表示经过5毫秒的执行时间。 -
当
execute_time_ms[n]的值减少到0时,表示当前子任务已经执行了足够的时间,需要切换到下一个子任务。 -
通过检查
execute_time_ms[n]的值,可以确定何时切换到下一个子任务,以便按照一定的时间间隔执行不同的飞行动作。 -
在这段代码中,每个子任务执行完成后,会将
execute_time_ms[n]的值重新设置为下一个子任务的执行时间,从而继续执行下一个子任务。
总之,execute_time_ms 在这段代码中用于控制飞行子任务的执行时机,以确保不同的子任务按照一定的时间间隔执行,实现多步骤的飞行动作。
3、以飞控预设的飞行任务demo中void Navigation_User_Setpoint(void)代码为例分析一下变量flight_global_cnt和flight_global_cnt2的作用?
//用户通过按键自定义输入三维的航点位置,无人机依次遍历各个航点,最多支持28个航点
void Navigation_User_Setpoint(void)
{static uint8_t n=13;Vector3f target_position;float x=0,y=0,z=0; if(flight_subtask_cnt[n]==0)//起飞点作为第一个悬停点{basic_auto_flight_support();//基本飞行支持软件user_setpoint_generate();//生成航点//记录下初始起点位置,实际项目中可设置为某一基准原点//base_position.x=VIO_SINS.Position[_EAST];//base_position.y=VIO_SINS.Position[_NORTH];base_position.z=First_Working_Height;//第一作业高度x=base_position.x;y=base_position.y;z=First_Working_Height;target_position.x=x;target_position.y=y;target_position.z=z;Horizontal_Navigation(target_position.x,target_position.y,target_position.z,GLOBAL_MODE,MAP_FRAME);flight_subtask_cnt[n]=1;flight_global_cnt[n]=0;flight_global_cnt2[n]=0;execute_time_ms[n]=1000/flight_subtask_delta;//子任务执行时间}else if(flight_subtask_cnt[n]==1)//起飞之后原定悬停1S后再执行航点任务{basic_auto_flight_support();//基本飞行支持软件if(execute_time_ms[n]>0) execute_time_ms[n]--;if(execute_time_ms[n]==0)//悬停时间计数器归零,悬停任务执行完毕 {//判断所有航点均执行完毕,执行下一任务if(flight_global_cnt2[n]>=user_setpoint_max){flight_subtask_cnt[n]=3;//结束航点遍历flight_global_cnt[n]=0;execute_time_ms[n]=0;//航点计数器清0flight_global_cnt2[n]=0;return ; }uint16_t current_num=constrain_int32(flight_global_cnt2[n],0,user_setpoint_max-1);//限幅防溢出if(user_setpoint_valid_flag[current_num]==true)//如果当前的航点有效,就设置目标航点进入下一线程{x=nav_setpoint[current_num][0];y=nav_setpoint[current_num][1];z=nav_setpoint[current_num][2];target_position.x=base_position.x+x;//水平位置期望为起飞后基准位置+位置X偏移target_position.y=base_position.y+y;//水平位置期望为起飞后基准位置+位置Y偏移target_position.z=z;Horizontal_Navigation(target_position.x,target_position.y,target_position.z,GLOBAL_MODE,MAP_FRAME);flight_subtask_cnt[n]=2;flight_global_cnt[n]=0;execute_time_ms[n]=0; }else//如果当前的航点无效,跳过当前航点,继续设置下一航点{//航点计数器自加flight_global_cnt2[n]++; }} }else if(flight_subtask_cnt[n]==2)//检测起飞点悬停完毕后,飞向下一个目标点{basic_auto_flight_support();//基本飞行支持软件 //判断是否到达目标航点位置if(flight_global_cnt[n]<user_setpoint_fixed_times)//持续10*5ms=0.05s满足{float dis_cm=pythagorous3(OpticalFlow_Pos_Ctrl_Err.x,OpticalFlow_Pos_Ctrl_Err.y,Total_Controller.Height_Position_Control.Err);if(dis_cm<=user_setpoint_fixed_3d_cm) flight_global_cnt[n]++;else flight_global_cnt[n]/=2;}else//持续10*5ms满足,表示到达目标航点位置{flight_subtask_cnt[n]=1;flight_global_cnt[n]=0;execute_time_ms[n]=0; //航点计数器自加flight_global_cnt2[n]++;}//判断所有航点均执行完毕,执行下一任务 if(flight_global_cnt2[n]>=user_setpoint_max){flight_subtask_cnt[n]=3;flight_global_cnt[n]=0;execute_time_ms[n]=0;//航点计数器清0flight_global_cnt2[n]=0; }}else if(flight_subtask_cnt[n]==3)//执行航点完毕后,原地下降,可以根据实际需要,自写更多的飞行任务{Flight.yaw_ctrl_mode=ROTATE;Flight.yaw_outer_control_output =RC_Data.rc_rpyt[RC_YAW];OpticalFlow_Control_Pure(0);Flight_Alt_Hold_Control(ALTHOLD_AUTO_VEL_CTRL,NUL,-30);//高度控制 }else{basic_auto_flight_support();//基本飞行支持软件}
}在上面的代码中,flight_global_cnt 和 flight_global_cnt2 用于跟踪和管理飞行任务中的不同阶段和航点遍历。这两个变量的作用如下:
flight_global_cnt的作用:flight_global_cnt用于跟踪当前子任务的执行状态,特别是在检查是否到达目标航点位置时。- 当飞机正在尝试到达一个目标航点时,
flight_global_cnt在特定条件下递增。这个条件可能是满足一定的时间持续条件或距离条件。 - 如果
flight_global_cnt达到一定的条件(例如满足时间或距离条件),则表示飞机已经到达目标航点,随后可以执行下一个任务或目标。
flight_global_cnt2的作用:flight_global_cnt2用于跟踪当前正在执行的航点计数。它保持记录当前飞机已经到达了哪些航点,并在执行航点遍历任务时递增。- 飞机遍历多个航点时,它可以确保飞机按照用户设定的航点顺序进行遍历。
- 当所有航点都已经执行完毕时,
flight_global_cnt2可能被重置,以便开始执行下一个任务或结束任务。
这两个变量是飞行任务管理的重要组成部分,用于确保飞机按照预定的轨迹和航点执行飞行任务。flight_global_cnt 和 flight_global_cnt2 通过递增、重置和条件检查,协同工作以实现飞机的航点遍历和任务执行。
4、帮我分析一下2023年TI国赛G题发挥部分void Air_Ground_Extinguish_Fire_System_Innovation(void)代码执行的流程?
上面的代码是一个函数,称为Air_Ground_Extinguish_Fire_System_Innovation,该函数用于实现无人机的灭火系统控制。以下是该代码的执行过程:
-
初始化静态局部变量:
n:用于标识飞行任务的子任务编号。fx和fy:用于记录火源位置的变量。current_nav_cnt:用于记录当前执行的航点编号。target_position:用于存储目标位置的三维坐标。x,y, 和z:用于存储临时坐标。
-
根据子任务计数器
flight_subtask_cnt[n]执行不同的任务阶段。-
阶段 0 (
flight_subtask_cnt[n] == 0):
- 初始化基本飞行支持。
- 控制激光笔点亮。
- 记录初始起点位置。
- 设置飞机的目标位置,即巡逻高度。
- 进行水平导航。
- 初始化子任务参数,并将子任务计数器
flight_subtask_cnt[n]更新为 1。
-
阶段 1 (
flight_subtask_cnt[n] == 1):
- 初始化基本飞行支持。
- 检查是否所有航点均执行完毕。
- 如果所有航点已执行完毕,则结束航点遍历,准备返航降落。
- 设置当前航点的目标位置,进行水平导航。
- 更新子任务参数,并将子任务计数器
flight_subtask_cnt[n]更新为 2。
-
阶段 2 (
flight_subtask_cnt[n] == 2):
- 初始化基本飞行支持。
- 检查是否到达目标航点位置。
- 如果到达目标航点位置,更新子任务参数,并将子任务计数器
flight_subtask_cnt[n]更新为 1。 - 增加当前航点计数器
flight_global_cnt2[n]。
-
阶段 3 (
flight_subtask_cnt[n] == 3):
- 飞向起飞点正上方,进行高度控制。
- 检查是否到达目标航点位置,更新子任务参数。
-
阶段 4 (
flight_subtask_cnt[n] == 4):
- 飞机在原地下降,进行高度和姿态控制。
-
阶段 5 (
flight_subtask_cnt[n] == 5):
- 执行色块对准,实现无人机飞至火源上方的动作。
- 检查执行时间条件,如果色块对准执行时间到达,继续下一个任务。
- 如果到达目标正上方,切换到高度控制任务。
-
阶段 6 (
flight_subtask_cnt[n] == 6):
- 下降到 100cm 高度,进行高度控制。
- 放出吊仓。
-
阶段 7 (
flight_subtask_cnt[n] == 7):
- 悬停 3 秒后,抛洒灭火包。
- 控制舵机动作。
-
阶段 8 (
flight_subtask_cnt[n] == 8):
- 释放灭火包动作后,执行动作。
- 更新火源信息,坐标数据通过串口发送到小车。
-
阶段 9 (
flight_subtask_cnt[n] == 9):
- 恢复到 180cm 巡逻高度,进行高度控制。
- 如果到达巡逻高度,准备返航降落或继续巡逻。
-
-
最后一个
else语句表示如果flight_subtask_cnt[n]的值不在上述列出的范围内,则执行基本飞行支持。
整体来说,该函数负责控制无人机执行一系列灭火任务,包括巡逻、火源检测、色块对准、高度控制、释放灭火包、记录火源位置、以及恢复到巡逻高度等任务。它根据子任务计数器的值来管理不同任务阶段,并根据条件判断是否满足任务完成的条件。一旦任务完成,它将转移到下一个任务阶段或子任务。
相关文章:
)
运用ChatGPT辅助新手学习躺赢者PRO飞控二次开发示例(2023年10月28日)
运用ChatGPT辅助新手学习躺赢者PRO飞控二次开发示例(2023年10月28日) 1、以飞控预设的飞行任务demo中void flight_subtask_1(void)代码为例分析一下变量flight_subtask_cnt的作用? //逆时针转动90度,完成后降落 void flight_sub…...

【Java】HashCode方法重写注意事项
HashCode方法 HashCode方法是属于Object父类提供的方法,HashCode方法返回该对象的哈希码值。支持该方法是为哈希表提供一些优点,例如,java.util.Hashtable提供的哈希表HashCode的常规协定是:在Java应用程序执行期间,在…...

039-第三代软件开发-PDF阅读器
第三代软件开发-PDF阅读器 文章目录 第三代软件开发-PDF阅读器项目介绍PDF阅读器1 初始化PDF view2 qml 中使用3 创建模块 关键字: Qt、 Qml、 pdf、 LTDev、 本地 项目介绍 欢迎来到我们的 QML & C 项目!这个项目结合了 QML(Qt Met…...

计算机毕业设计选题推荐-跑腿平台微信小程序/安卓APP-项目实战
✨作者主页:IT研究室✨ 个人简介:曾从事计算机专业培训教学,擅长Java、Python、微信小程序、Golang、安卓Android等项目实战。接项目定制开发、代码讲解、答辩教学、文档编写、降重等。 ☑文末获取源码☑ 精彩专栏推荐⬇⬇⬇ Java项目 Python…...
RocketMQ生产者消息发送出去了,消费者一直接收不到怎么办?(Rocket MQ订阅关系一致性)
问题: 使用RocketMQ消息队列,生产者将数据发送出去了,但是生产者一致没接收到(或者是间隔好几分钟,突然接收到一条数据)怎么办?并且通过rocket web控制台查看消息的状态为NOT_ONELINE或者NOT_CONSUME&#…...

使用Golang开发硬件驱动
1. 介绍 Golang是一种简洁、高效的编程语言,它的强大并发性能和丰富的标准库使得它成为了开发硬件驱动的理想选择。在本文中,我们将探讨如何使用Golang开发硬件驱动程序,并提供一个实例来帮助你入门。 2. 准备工作 在开始之前,…...
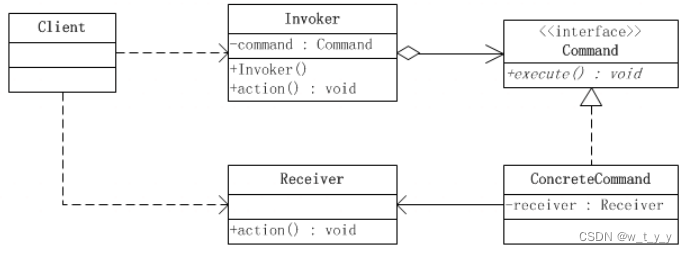
设计模式(19)命令模式
一、介绍: 1、定义:命令模式(Command Pattern)是一种行为设计模式,它将请求封装为一个对象,从而使你可以使用不同的请求对客户端进行参数化。命令模式还支持请求的排队、记录日志、撤销操作等功能。 2、组…...

QModelIndex 与QStandardItem相互转换
目录 1、 QModelIndex 转换成QStandardItem 2 、QStandardItem 转换成 QModelIndex 3、示例 4、总结 1、 QModelIndex 转换成QStandardItem QStandardItem * itemQStandardItemModel::itemFromIndex(const QModelIndex & index) const 借助QStandardItemModel来完成…...
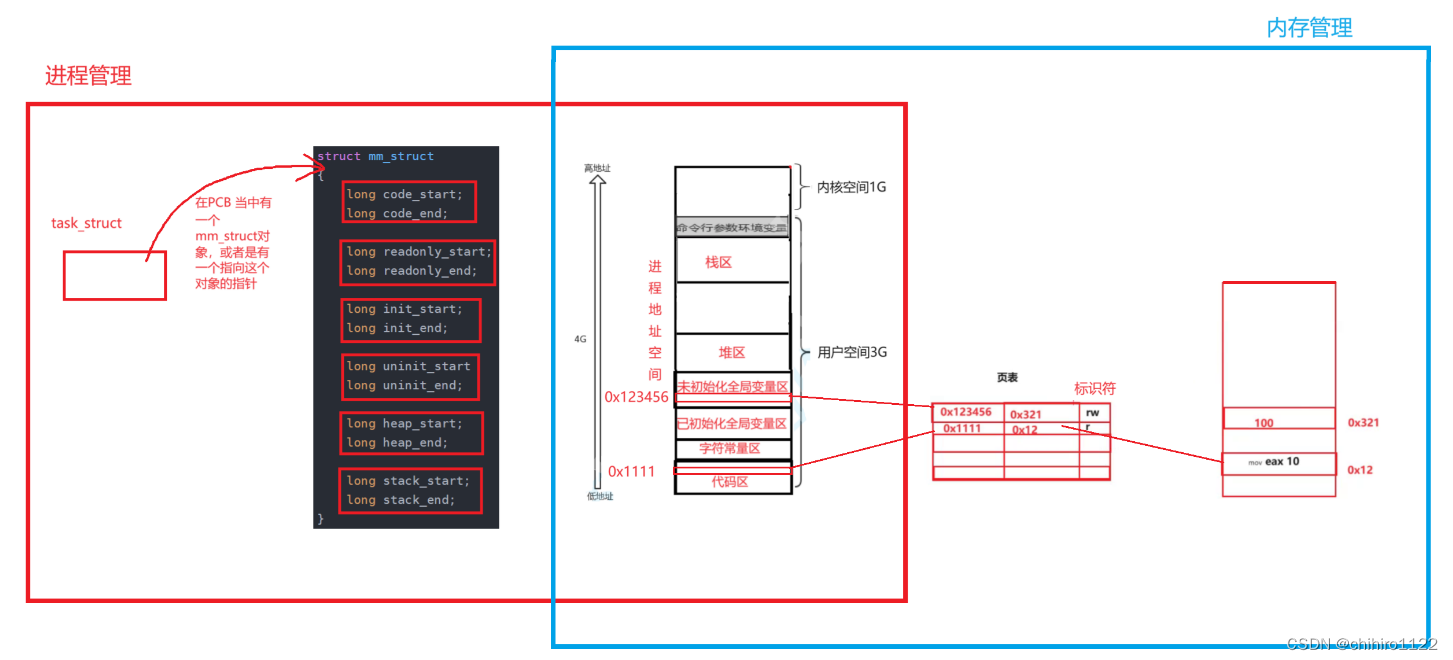
Linux - 进程地址空间
前言 首先,我们先要对 内存当中存储 各个数据之间的 结构要有一个 大概的了解: 各个区当中存储的数据使用类型不同,所以,这些数据在使用方式上是有差别的。比如下面这个例子: 在C 语言当中我们不能直接对 上述的 str…...

系统架构设计师-第16章-嵌入式系统架构设计理论与实践-软考学习笔记
嵌入式系统( Embedded System) 是为了特定应用而专门构建的计算机系统,其架构是随着嵌入式系统的逐步应用而发展形成的。嵌入式软件架构的设计与嵌入式系统的体系架构是密不可分的。因此,本常首先介绍嵌入式系统硬件相关知识(系统特征、硬件组…...

pod进阶
目录 资源限制 CPU 资源单位 内存 资源单位 实例 健康检查 探针的三种规则: Probe支持三种检查方法: 示例1:exec方式 示例2:httpGet方式 示例3:tcpSocket方式 示例4:就绪检测 扩展 资源限制 当定…...
#NOT_SUPPORTED)
系列四十七、Spring的事务传播行为案例演示(七)#NOT_SUPPORTED
一、演示Spring的传播行为(NOT_SUPPORTED) 1.1、StockServiceImplNOT_SUPPORTED /*** Author : 一叶浮萍归大海* Date: 2023/10/30 15:43* Description: 演示NOT_SUPPORTED的传播行为* 外部不存在事务:不开启新的事务* 外部存在…...

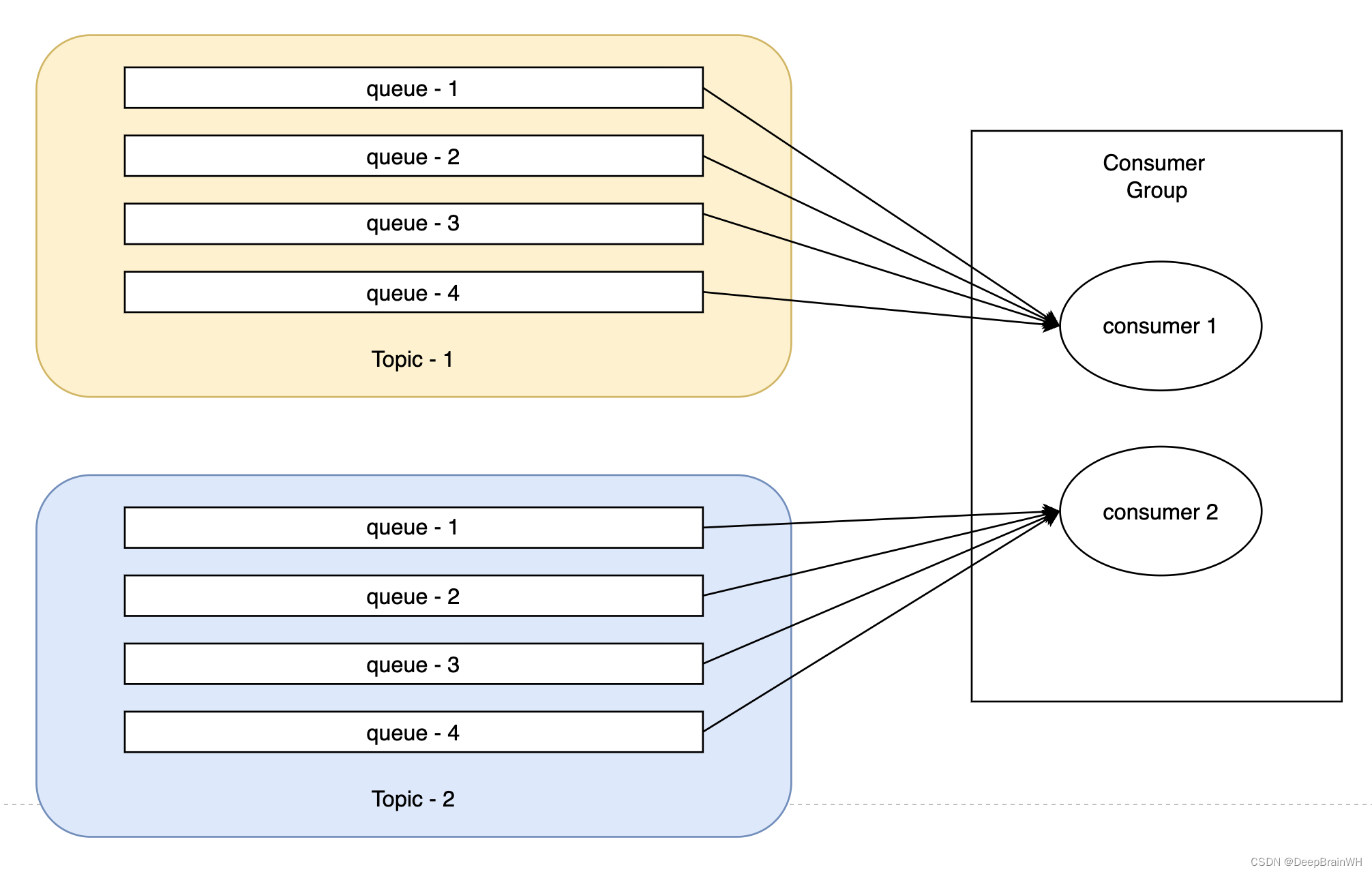
54.RabbitMQ快速实战以及核心概念详解
MQ MQ:MessageQueue,消息队列。这东西分两个部分来理解: 队列,是一种FIFO 先进先出的数据结构。 消息:在不同应用程序之间传递的数据。将消息以队列的形式存储起来,并且在不同的应用程序之间进行传递&am…...

Qt TreeView 设置节点不可编辑
目录 1. 创建treeview 2、节点不可编辑 3、设置logo 4、实例代码 1. 创建treeview //声明模型 QStandardItemModel *model;//创建4行,1列的模型 model new QStandardItemModel(4,1);//添加标题 model->setHeaderData(0, Qt::Horizontal, tr("Tree View…...

python django获取某个角色的某个数据和——例如:获取所有订单的应付金额总和
model关系如下: class Order(models.Model):订单product models.ForeignKey(Product, on_deletemodels.SET_NULL, blankTrue, nullTrue, verbose_name"产品")no models.CharField(max_length50, blankTrue, nullTrue, verbose_name订单编号, db_indexT…...
如何在React项目中引用less
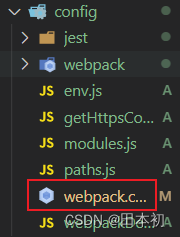
安装less npm install less less-loader --save-dev暴露 webpack 文件 利用 npx create-react-app 搭建的 React 项目,默认隐藏 webpack 配置文件,引入 less 需要修改 webpack 配置文件,因此我们需要执行命令暴露 webpack 配置文件。 请先将…...
NUXT前端服务端渲染技术框架
服务端渲染又称SSR(Server Side Render)实在服务端完成页面的内容,而不是在客户端通过AJAX获取数据 优势:更好的SEO,由于搜索引擎爬虫抓取工具可以直接查看完全渲染的页面 Nuxt.js是一个基于Vue.js的轻量级应用框架&a…...

力扣每日一题90:子集
题目描述: 给你一个整数数组 nums ,其中可能包含重复元素,请你返回该数组所有可能的子集(幂集)。 解集 不能 包含重复的子集。返回的解集中,子集可以按 任意顺序 排列。 示例 1: 输入&#x…...

「linux基础」上传代码到github/gitee
一、在gitee创建一个仓库 1.创建仓库 2.获取仓库地址 二、克隆仓库文件到linux中 1.查看Linux中是否安装git:git --version 如果没有,在root下使用指令 yum install -y git 安装。 2.使用 git clone 仓库地址,克隆仓库文件到linux中 三、第…...

Hafnium总体考虑
安全之安全(security)博客目录导读 目录 一、安全世界构建平台 二、安全分区调度 三、平台拓扑...

【技术解析】基于主成分分析与神经网络的航空安全风险建模:从QAR数据预处理到实时预警仿真
1. 航空安全风险建模的技术背景 每次坐飞机时,你可能都好奇过:机长是如何确保飞行安全的?其实背后有一整套数据驱动的安全体系在支撑。QAR(快速存取记录器)就像飞机的"黑匣子",记录了上百项飞行参…...

Ruby中文分词利器Rurima:纯Ruby实现的高性能分词引擎详解
1. 项目概述:一个为Ruby打造的现代中文分词引擎在Ruby社区里,处理中文文本一直是个有点“硌脚”的活儿。如果你做过中文搜索、内容分析或者简单的词频统计,肯定遇到过这个经典难题:怎么把一串连续的中文字符,准确地切割…...

3步掌握yfinance:从金融数据获取到智能分析的完整指南
3步掌握yfinance:从金融数据获取到智能分析的完整指南 【免费下载链接】yfinance Download market data from Yahoo! Finances API 项目地址: https://gitcode.com/GitHub_Trending/yf/yfinance yfinance是一个强大的Python库,能够轻松从Yahoo! F…...

Gitclaw:封装复杂Git操作,提升开发效率的命令行工具
1. 项目概述:一个为Git操作注入“爪牙”的命令行工具如果你和我一样,日常开发工作重度依赖Git,那你肯定也经历过这样的时刻:面对一个需要多步操作才能完成的复杂Git任务,比如清理多个已合并的分支、批量重写提交历史中…...

手机号归属地查询系统:3步构建可视化定位工具
手机号归属地查询系统:3步构建可视化定位工具 【免费下载链接】location-to-phone-number This a project to search a location of a specified phone number, and locate the map to the phone number location. 项目地址: https://gitcode.com/gh_mirrors/lo/l…...

Kubernetes配置管理实战:基于Kustomize的结构化部署与多环境管理
1. 项目概述:一个被低估的Kubernetes配置管理利器如果你和我一样,长期在Kubernetes生态里摸爬滚打,那你一定经历过这样的场景:为了部署一个稍微复杂点的应用,需要维护一堆YAML文件——Deployment、Service、ConfigMap、…...

窗口大小控制神器:3分钟掌握WindowResizer的终极窗口调整技巧
窗口大小控制神器:3分钟掌握WindowResizer的终极窗口调整技巧 【免费下载链接】WindowResizer 一个可以强制调整应用程序窗口大小的工具 项目地址: https://gitcode.com/gh_mirrors/wi/WindowResizer 还在为那些顽固的应用程序窗口而束手无策吗?是…...

AI Agent产品经理的新思维:从功能设计到AI原生产品的方法论转型
AI Agent产品经理的新思维:从功能设计到AI原生产品的方法论转型 各位产品同行、AI从业者,大家好!我是连续3年深耕AI工具Agent产品、从C端信息流(今日头条/抖音生态)PM成功转型AI原生垂直工具PM的张小白——过去两年&am…...
用户指引自助教学源码—东方仙盟)
未来之窗昭和仙君(九十三)用户指引自助教学源码—东方仙盟
代码<!DOCTYPE html> <html lang"zh-CN"> <head> <meta charset"UTF-8"> <meta http-equiv"X-UA-Compatible" content"IEedge,chrome1"> <title>你的导师-未来之窗</title> <style>*…...

5分钟掌握浏览器串口调试:提升嵌入式开发效率300%的终极指南
5分钟掌握浏览器串口调试:提升嵌入式开发效率300%的终极指南 【免费下载链接】SerialAssistant A serial port assistant that can be used directly in the browser. 项目地址: https://gitcode.com/gh_mirrors/se/SerialAssistant 你是否还在为串口调试工具…...