apollo云实验:定速巡航场景仿真调试
定速巡航场景仿真调试
- 概述
- 启动仿真环境
- 仿真系统
- 修改默认巡航速度
- 实验目的
- 福利活动
主页传送门:📀 传送
概述
自动驾驶汽车在实现落地应用前,需要经历大量的道路测试来验证算法的可行性和系统的稳定性,但道路测试存在成本高昂、极端交通场景复现等各种各样的问题。
想象一下当你发现了一个新的算法,但还不确认它是否有效,你是否会直接找一辆自动驾驶汽车,更新软件,并且进行测试呢?这样做可能并不安全,你必须把所有的场景测试一遍以保证它足够好,这可需要大量的时间。仿真的好处显而易见,它通过软件模拟来发现和复现问题,而不需要真实的环境和硬件,可以极大的节省成本和时间。
随着现在深度学习的兴起,仿真在自动驾驶领域有了新的用武之地。自动驾驶平台通过仿真采集数据,可以把训练时间大大提高,远远超出路测的时间,加快模型迭代速度。先利用集群训练模型,然后再到实际的路测中去检验,采用数据驱动的方式来进行自动驾驶研究。
仿真系统通过模拟各种交通场景生有效的实现了车辆在仿真系统下日行百万公里的测试,为自动驾驶系统开发提供了大量的数据支撑。
Sim_Control是Apollo软件交互系统Dreamview提供的仿真组件。
Sim_control通过模拟Chassis、Localization、Perception、Obstacle等信息输入,实现对routing、planning等算法模块的仿真调试,同时Apollo提供了PnC Monitor、Cyber Monitor等系统调试工具,可以实时的监控各模块运行数据,有效提升开发者对自动驾驶软件算法的学习与调试。
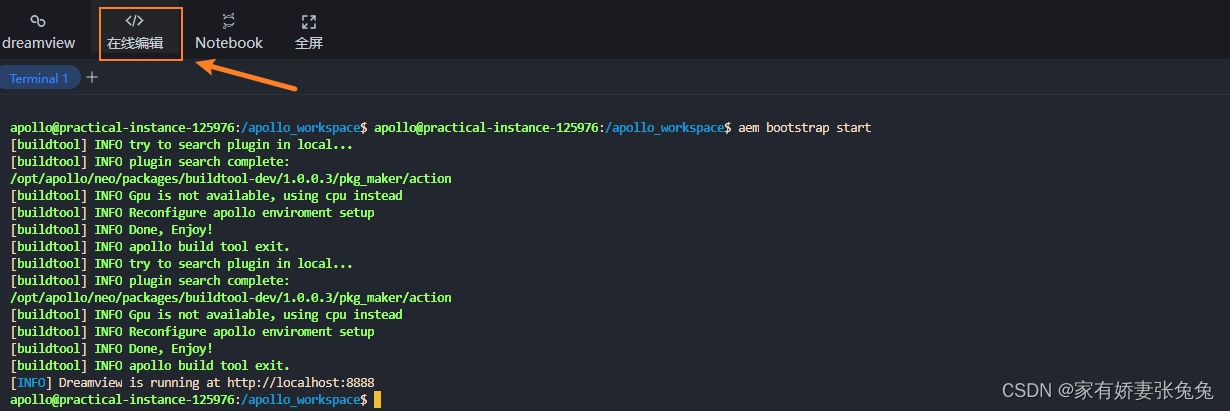
启动仿真环境
aem bootstrap start
运行成功如下图所示:
2. 单击上方 Dreamview 按钮进入 Dreamview 界面:
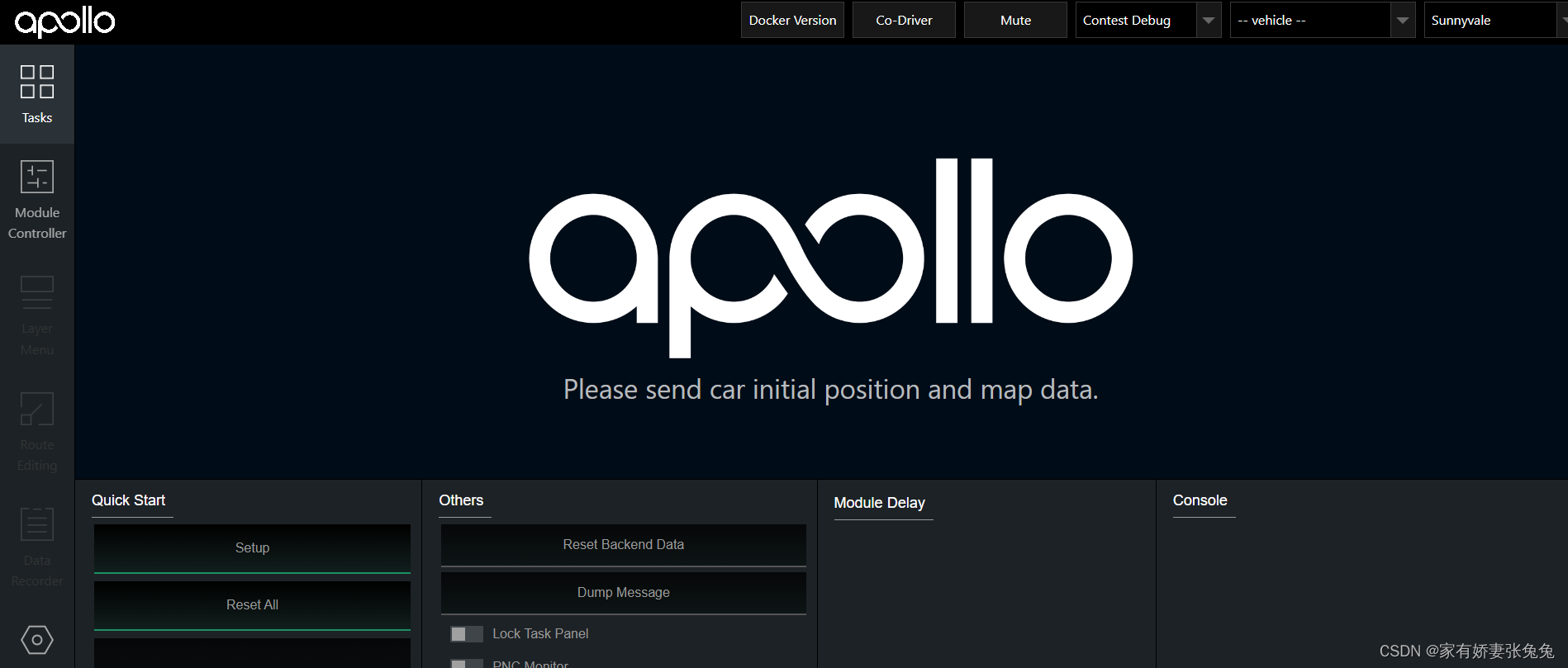
- DreamView 运行成功界面
仿真系统
-
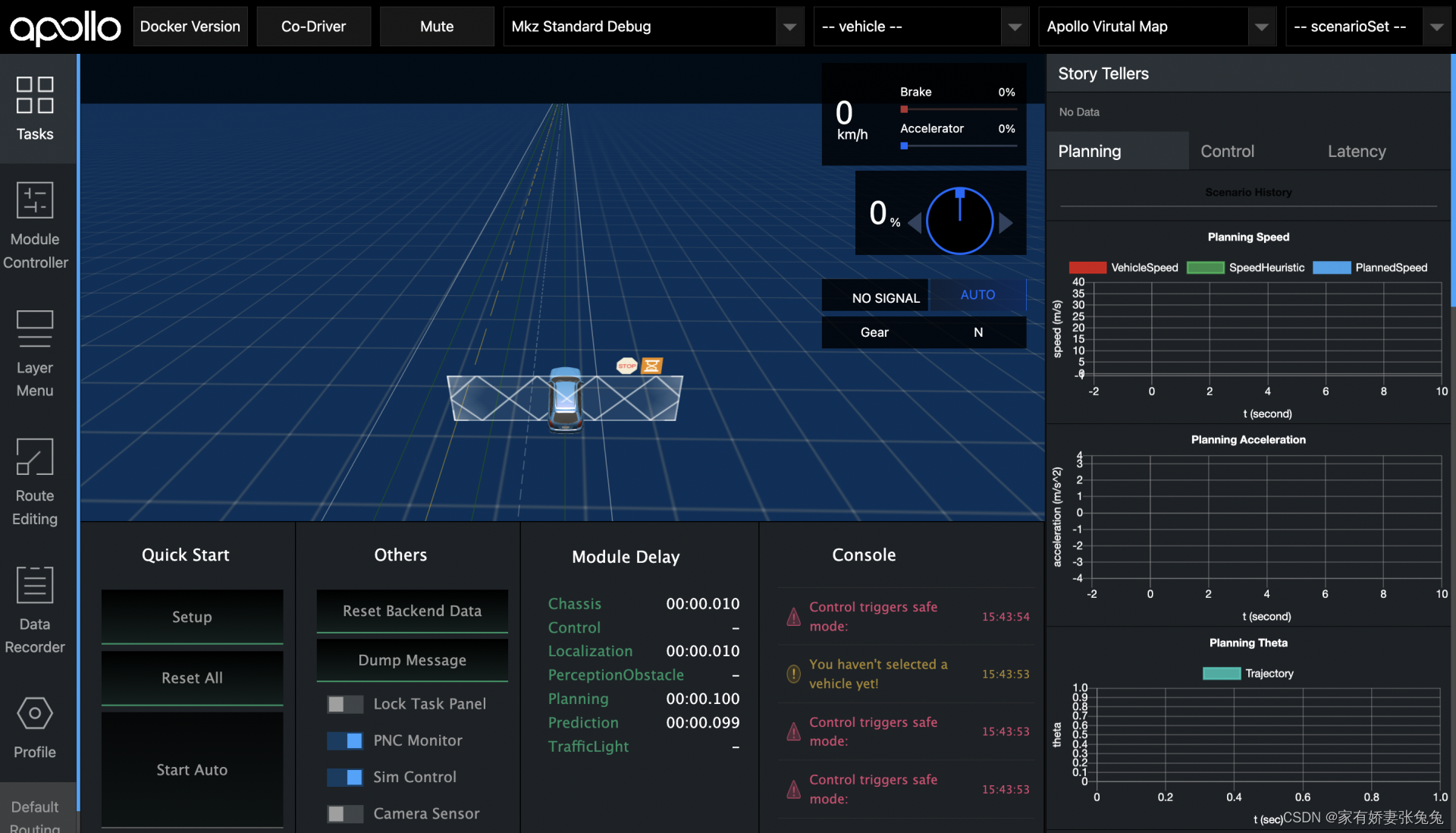
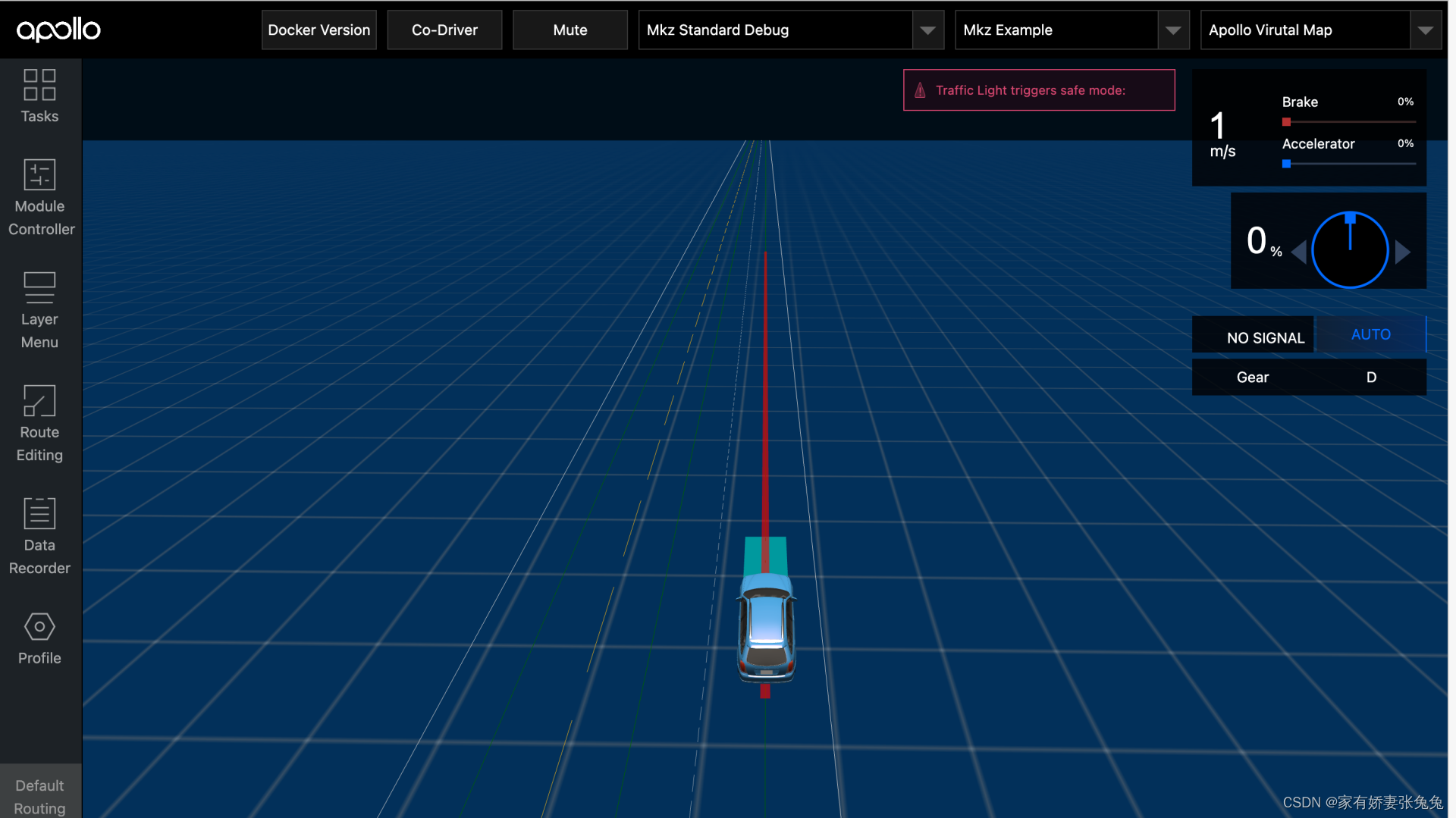
模式选择Mkz Standard Debug,地图选择Apollo Virutal Map,打开Sim_Control模式,打开PNC Monitor,等待屏幕中间区域出现Mkz车模型和地图后即表示成功进入仿真模式。
-
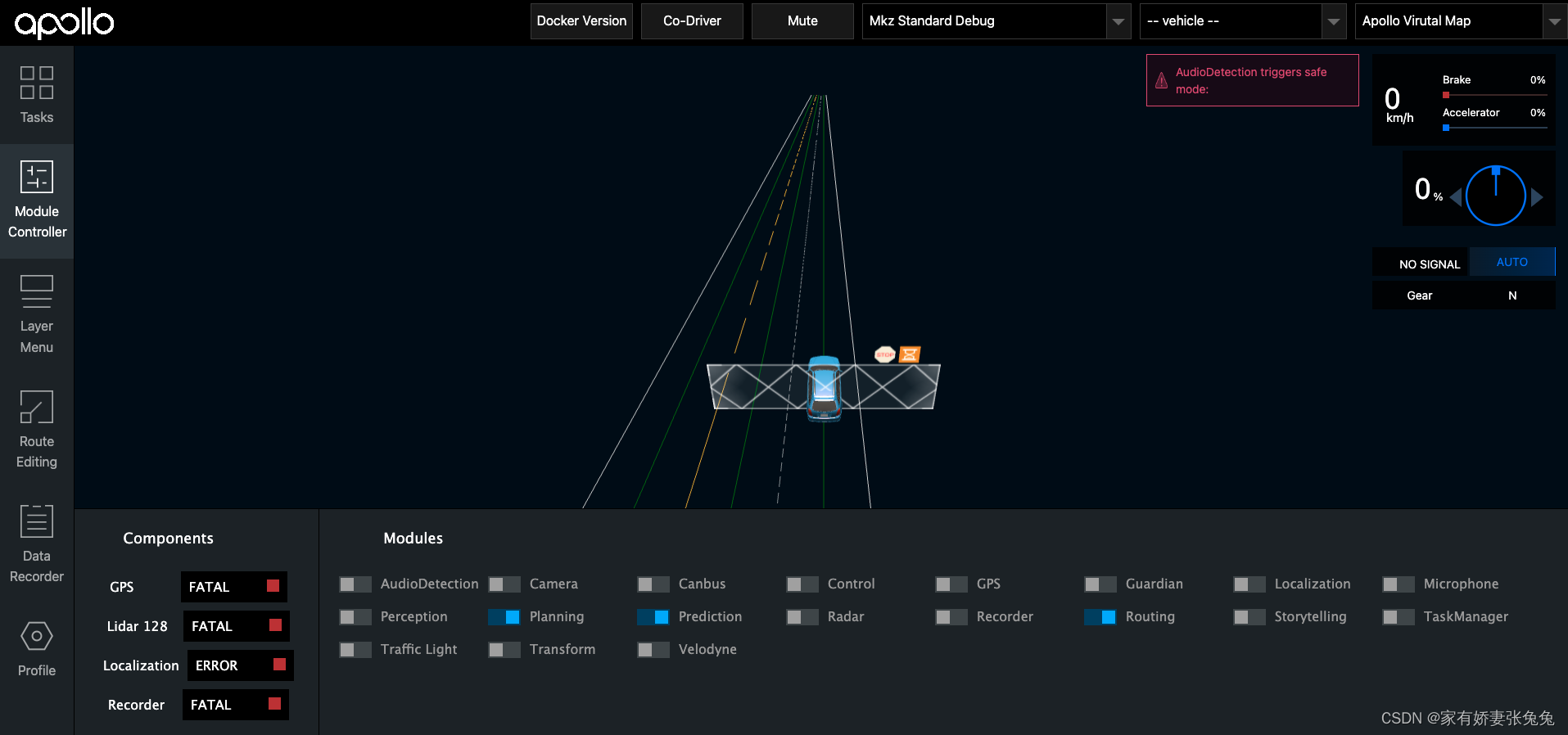
点击左侧Tab栏Module Controller,启动Planning,Prediction,Routing模块
-
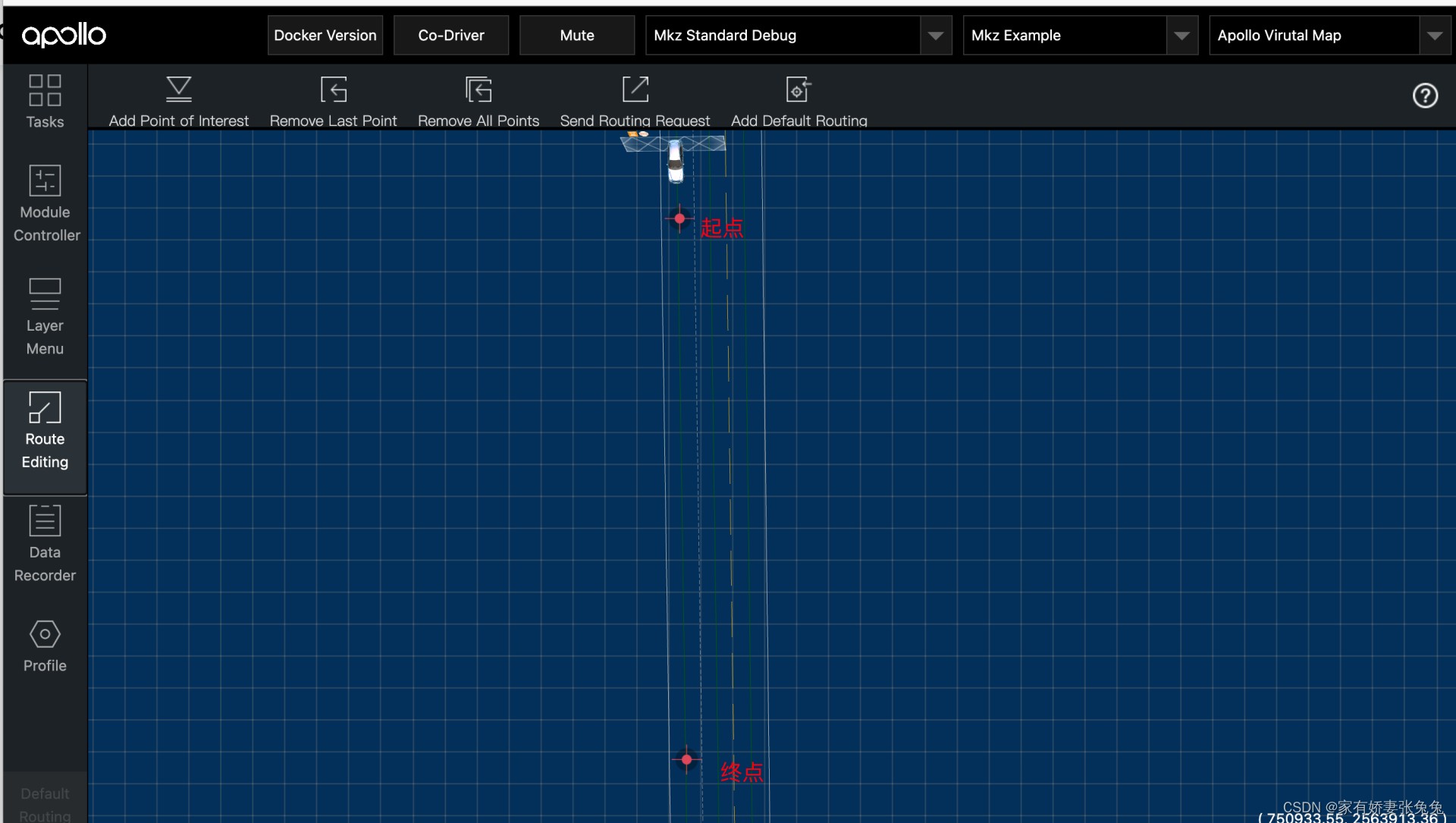
模块启动完成后,点击左侧Tab栏Route Editing,拖动、点击鼠标可以在地图中设置车辆行驶路径(起点-终点)。
-
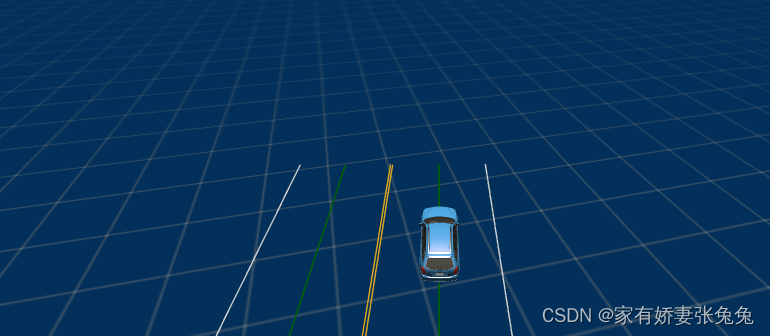
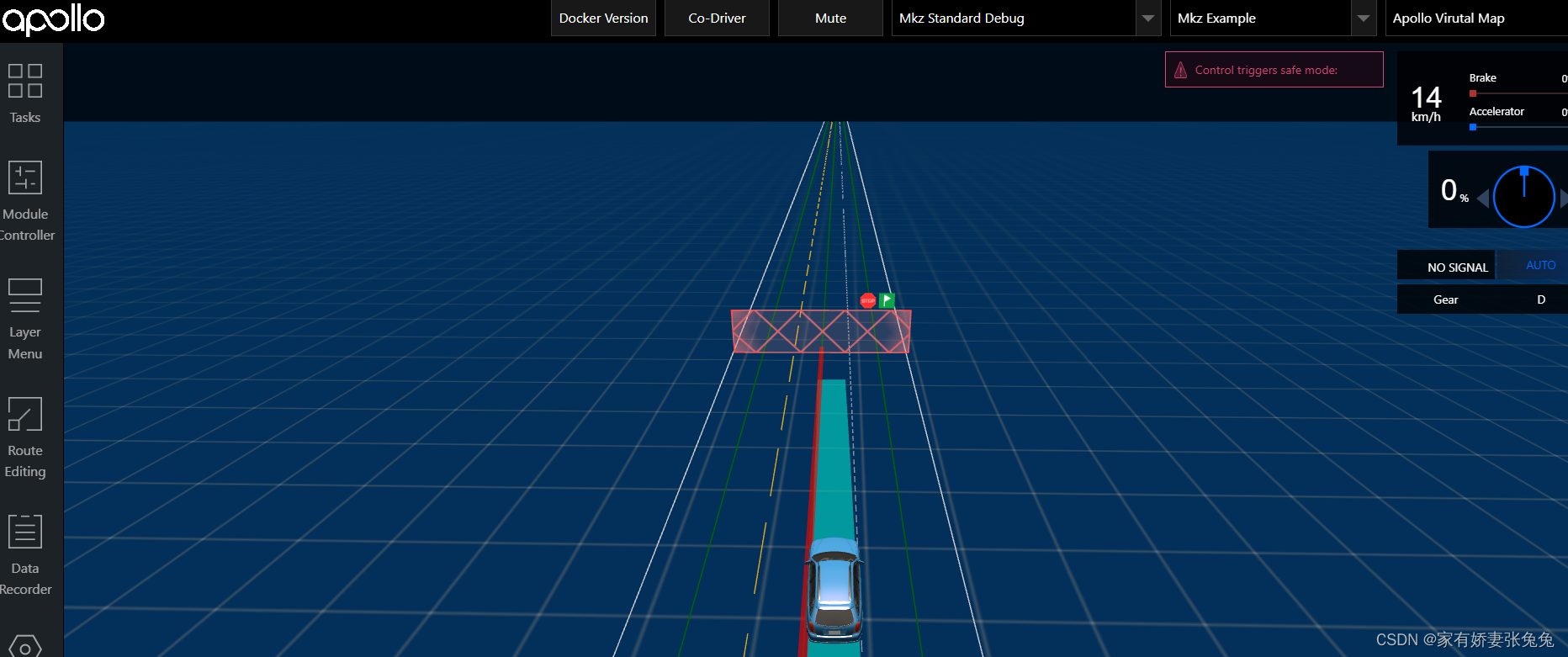
当点位设置完成后,点击Send Routing Request,车辆就会动起来了,红线是routing模块在地图中搜索出的路径,浅蓝色的轨迹是planning模块实时规划的局部路径,此时观测巡航速度发现最高可达到40km/h。
修改默认巡航速度
apollo/modules/planning/conf下存放了planing相关的配置文件,其中planning_upper_speed_limit表示Planing的上限速度,default_cruise_speed表示默认巡航速度。
-
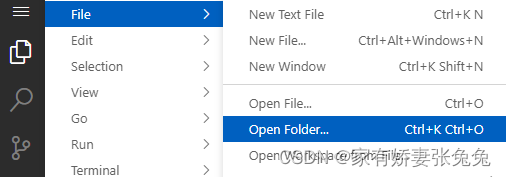
打开云实验平台的在线编辑器
-
点击File > Open Folder, 选择进入/apollo目录。
-
打开/apollo/modules/planning/conf目录下的planning.conf文件,如下图所示将default_cruise_speed修改为1.00,点击保存。
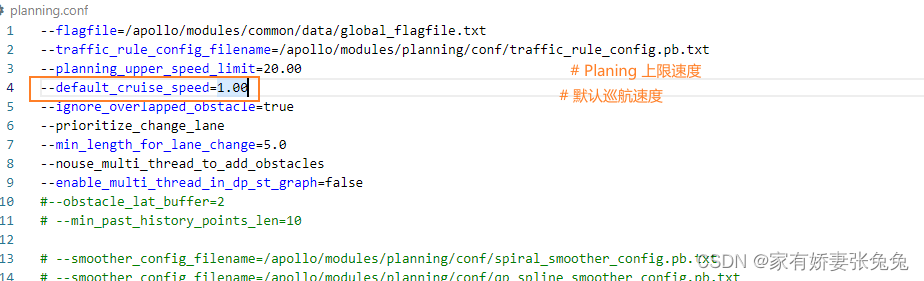
-
修改好代码参数后,保存这个文件,在Module Controller中重启planning模块(让系统重新加载Planing参数),重新发送routing request即可看到车辆巡航速度已经变为3.6km/h了。
**注:**PNC monitor上显示的速度单位为km/h,planning.conf配置文件中的速度单位为m/s。
实验目的
- 熟悉Apollo软件系统的启动方法,掌握Dreamview交互系统使用。
- 熟悉Apollo软件系统工作流程,掌握系统调试工具的Cyber_monitor使用
- 掌握通过Sim_Control模块对Apollo软件代码的仿真调试方法
福利活动
加入课程

Apollo开发者社区 观看课程学习apollo
课程进度可以拖动 几秒就能完成。
学完填表选心仪的奖品领奖就行
表单填写
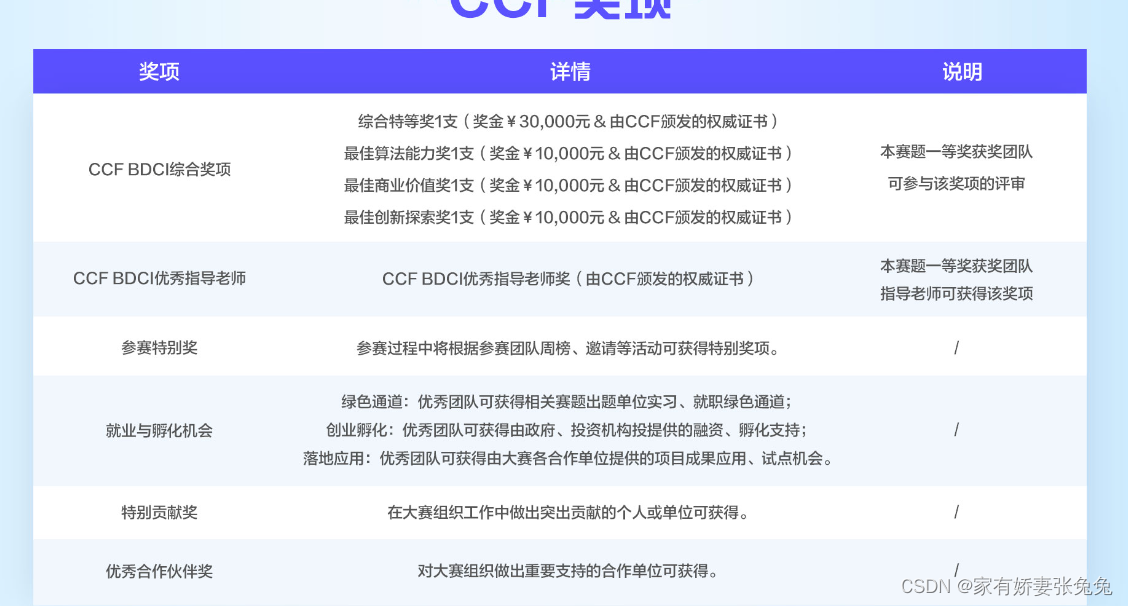
另有赛事活动奖品:
CCF赛事

相关文章:
apollo云实验:定速巡航场景仿真调试
定速巡航场景仿真调试 概述启动仿真环境仿真系统修改默认巡航速度 实验目的福利活动 主页传送门:📀 传送 概述 自动驾驶汽车在实现落地应用前,需要经历大量的道路测试来验证算法的可行性和系统的稳定性,但道路测试存在成本高昂、…...

基于RK3568的新能源储能能量管理系统ems
新能源储能能量管理系统(EMS)是一种基于现代化技术的系统,旨在管理并优化新能源储能设备的能量使用。 该系统通过监测、调度和控制新能源储能设备来确保能源的高效利用和可持续发展。 本文将从不同的角度介绍新能源储能能量管理系统的原理、…...
dockerfile避坑笔记(VMWare下使用Ubuntu在Ubuntu20.04基础镜像下docker打包多个go项目)
一、docker简介 docker是一种方便跨平台迁移应用的程序,通过docker可以实现在同一类操作系统中,如Ubuntu和RedHat两个linux操作系统中,实现程序的跨平台部署。比如我在Ubuntu中打包了一个go项目的docker镜像(镜像为二进制文件&am…...
Qt 使用QtXlsx操作Excel表
1.环境搭建 QtXlsx是一个用于读写Microsoft Excel文件(.xlsx)的Qt库。它提供了一组简单易用的API,可以方便地处理电子表格数据。 Github下载:GitHub - dbzhang800/QtXlsxWriter: .xlsx file reader and writer for Qt5 官方文档…...
canal+es+kibana+springboot
1、环境准备 服务器:Centos7 Jdk版本:1.8 Mysql版本:5.7.44 Canal版本:1.17 Es版本:7.12.1 kibana版本:7.12.1 软件包下载地址:链接:https://pan.baidu.com/s/1jRpCJP0-hr9aI…...

【力扣】面试经典150题——双指针
文章目录 125. 验证回文串392. 判断子序列167. 两数之和 II - 输入有序数组11. 盛最多水的容器15. 三数之和 125. 验证回文串 如果在将所有大写字符转换为小写字符、并移除所有非字母数字字符之后,短语正着读和反着读都一样。则可以认为该短语是一个 回文串 。 字…...
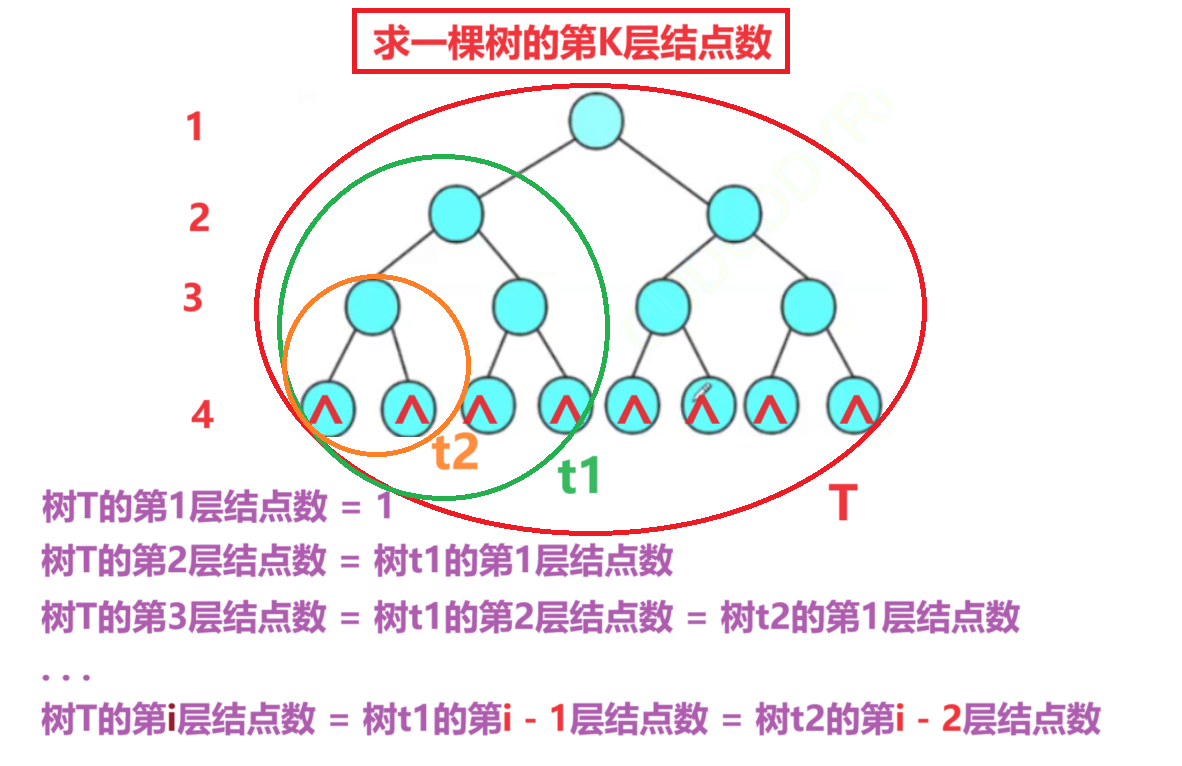
6-8 最宽层次结点数 分数 10
文章目录 1.题目描述2.本题ac答案2.1法一: 代码复用2.2法二: 顺序队列实现层序遍历 3.C层序遍历求最大宽度3.1层序遍历代码3.2求最大宽度 1.题目描述 2.本题ac答案 2.1法一: 代码复用 //二叉树第i层结点个数 int LevelNodeCount(BiTree T, int i) {if (T NULL || i < 1)re…...

Linux学习第28天:Platform设备驱动开发(二): 专注与分散
Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长 三、硬件原理图分析 四、驱动开发 1、platform设备与驱动程序开发 53 /* 54 * 设备资源信息,也就是 LED0 所使用的所有寄存器 55 */ 56 static str…...
查询)
postgresql数组重叠(有共同元素)查询
直接上最终代码: select distinct id from a where string_to_array(in_area,,) && (select ARRAY_AGG( code) from areas where code like 11% or code 100000)::TEXT[] pg语法: 表 9.48显示了可用于数组类型的运算符。 表 9.48。数组运算符…...

ubuntu系统 生成RSA密钥对
在Ubuntu系统上生成密钥对通常指的是生成SSH密钥对,它常用于安全的远程登录、数据通信和其他安全网络操作。以下是如何在Ubuntu系统上生成SSH密钥对的步骤: 打开终端:你可以使用快捷键 Ctrl Alt T 在Ubuntu上打开一个终端窗口。 运行ssh-k…...
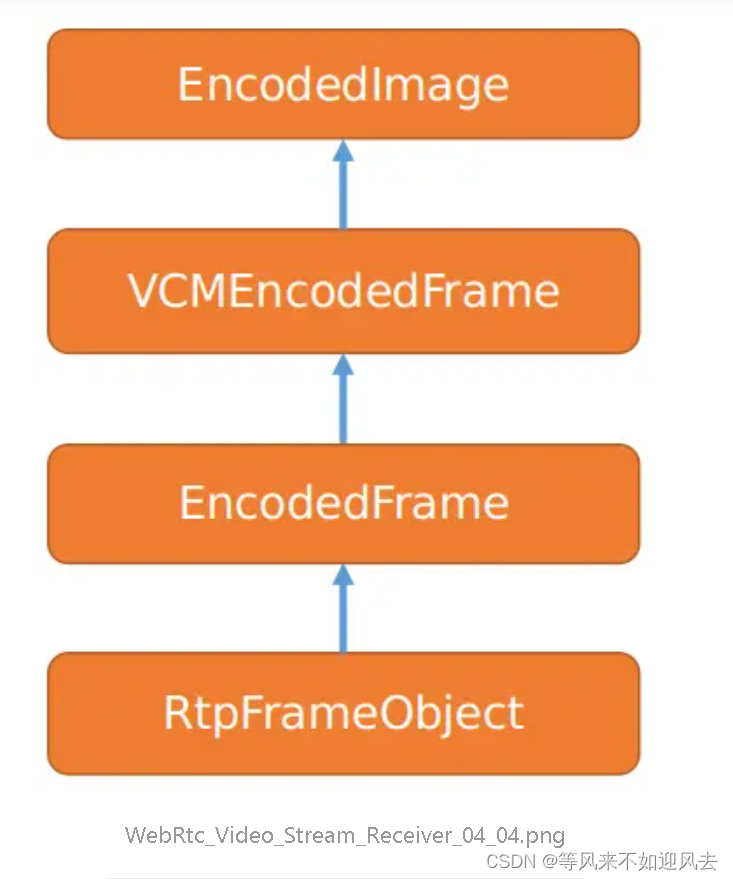
【RtpSeqNumOnlyRefFinder】webrtc m98: ManageFrameInternal 的帧决策过程分析
Jitterbuffer(FrameBuffer)需要组帧以后GOP内的参考关系 JeffreyLau 大神分析 了组帧原理而参考关系(RtpFrameReferenceFinder)的生成伴随了帧决策 FrameDecisionFrameDecision 影响力 帧的缓存。调用 OnAssembledFrame 传递已经拿到的RtpFrameObject 那么,RtpFrameObject…...

centos系统源码编译安装nginx,并编写服务脚本
1.安装编译所需的依赖项: yum install -y gcc pcre-devel openssl-devel zlib-devel2.下载 Nginx 源代码: wget http://nginx.org/download/nginx-1.21.3.tar.gz tar -xf nginx-1.21.3.tar.gz cd nginx-1.21.33.配置编译选项并进行编译和安装ÿ…...

2023下半年软考高项答题技巧!
2023下半年软考倒计时最后一天,一些软考高项答题技巧分享! 高项答题技巧 1、综合知识 (1)首先是分析试题的技巧 –先看清楚问题,再看选项; –判断题目到底考察的是什么知识点,排除干扰项。…...
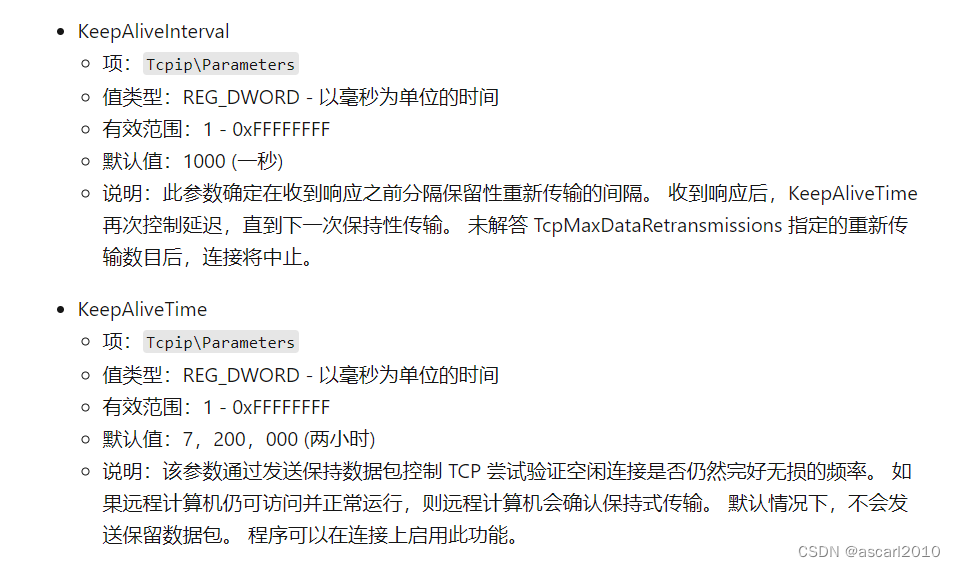
windows server 2016调优
1. 增加TCP连接的最大数量: 在您当前的注册表路径(HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services\Tcpip\Parameters)中的右侧窗格,右击空白处,选择“新建” -> “DWORD (32位) 值”。为新的值命名为TcpNu…...

Qt 插件开发详解
1.简介 Qt插件是一种扩展机制,用于将应用程序的功能模块化,并且可以在运行时动态加载和卸载。Qt框架为插件提供了一套标准的接口和管理机制,使得插件的使用和集成变得简单和灵活,通过插件机制,可以将应用程序的功能划…...
vue需求:实现签章/签字在页面上自由定位的功能(本质:元素在页面上的拖拽)
目录 第一章 效果展示 第二章 了解工具 2.1 draggable 2.1.1 了解draggable 2.1.2 draggable方法 2.1.3 利用例子理解方法 第三章 效果实现 3.1 实现思路 3.2 代码实现 3.2.1 涉及到的点 3.2.2 源代 第一章 效果展示 效果描述:通过点击左边栏的签名和…...
【深度学习基础】Pytorch框架CV开发(1)基础铺垫
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...

uniapp原生插件之安卓热敏打印机打印插件
插件介绍 安卓热敏打印机打印插件,自动授权,打印机连接监听,打印文本,条形码,二维码,切纸,打印机状态,打印结果查询等 插件地址 安卓热敏打印机打印插件 - DCloud 插件市场 超级…...

巴菲特:卖比亚迪有助于资金配置
巴菲特表示,未来可能会有更多银行倒闭,但储户不必担心,他警告说,陷入困境的银行股不是价值投资,因为即使政府采取行动保护储户,股东的权益也会受到损失。他称,将加大对日本综合商社的投资&#…...

香港服务器有哪些特点
香港服务器具有以下特点: 速度快:香港服务器地理位置优越,与内地服务器相比,网络延迟更低,访问速度更快。 稳定性高:香港服务器位于全球重要的金融中心,网络环境稳定,服务器稳定性高…...

Cadence Allegro实战:除了Shape Keepout,还有哪些方法能精准控制铺铜区域?
Cadence Allegro实战:5种精准控制铺铜区域的进阶技巧 在复杂PCB设计中,铺铜区域的控制往往决定了信号完整性和EMC性能。Shape Keepout虽然是设计师最熟悉的工具,但Allegro其实提供了更丰富的"Areas"类命令集。本文将深入解析Route …...

告别黑盒:手把手教你用VTK在QT中‘组装’并驱动SolidWorks导出的机械臂模型
从STL零件到可交互机械臂:VTKQT三维可视化开发实战 机械臂的数字化仿真一直是工业自动化与机器人教学中的核心课题。想象一下,当你从SolidWorks中导出一堆零散的STL文件,如何在代码中让它们"活"起来——每个关节都能独立旋转&#…...

Google关键词能带来多少流量?大词和长尾词的真实流量比例
一家销售软件的公司耗费六个月将“CRM”排至谷歌首页第五名。该词每月产生50万次搜索。网页获得2100次点击。跳出率高达89%。停留时间仅12秒。投入资金4万美元。获得零份询盘。做“外贸企业定制管理软件”排名首页第一。此词汇每月搜索量150次。每月收获62次点击。停留时间4分3…...
:助你轻松掌握办公自动化利器)
Excel VBA编程实例(150例):助你轻松掌握办公自动化利器
Excel VBA编程实例(150例):助你轻松掌握办公自动化利器 【下载地址】ExcelVBA编程实例150例资源下载 本仓库提供了一个名为“Excel VBA编程实例(150例)”的资源文件下载。该资源文件包含了150个Excel VBA编程实例,旨在帮助用户通过实际案例学习和掌握Exc…...

如何免费下载网页视频?VideoDownloadHelper浏览器插件终极指南
如何免费下载网页视频?VideoDownloadHelper浏览器插件终极指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法保存网页…...
)
别再死记ResNet结构了!用PyTorch手把手带你复现ResNet-50(附完整代码与可视化)
从零构建ResNet-50:PyTorch实战与架构解密 当你第一次看到ResNet的残差连接时,是否曾被那个"跳跃"的结构所困惑?为什么简单的跨层连接就能解决深度网络的退化问题?本文将以工程师视角,带你用PyTorch从第一行…...

【必记】2026年 {论文题} |范文记忆提纲-A
第一篇:规划绩效域《论信息系统项目的规划绩效域》一、项目背景段落1:平台立项背景目的:推进智能制造建筑工业化,达成高效、高质、低耗、低排发起方:市住建局平台模块:十大功能模块(市场监管、安…...
)
别再为版本号头疼了!手把手教你搞定Windows上ChromeDriver与Chrome的版本匹配(附最新镜像源)
别再为版本号头疼了!手把手教你搞定Windows上ChromeDriver与Chrome的版本匹配 每次启动Selenium脚本时看到SessionNotCreatedException报错,就像在高速公路上突然爆胎——明明昨天还能正常运行的自动化测试,今天就因为Chrome自动更新而彻底罢…...

CANape测量启动报错“存储空间不足”的系统性排查与解决方案
1. 问题现象与根源剖析如果你是一名汽车电子工程师,或者从事车辆标定、诊断与测试工作,那么CANape这个软件对你来说,就像吃饭用的筷子一样熟悉。它强大的测量、标定和诊断功能,是我们在开发过程中不可或缺的利器。然而,…...

番茄小说下载器:3分钟构建个人离线图书馆的终极指南
番茄小说下载器:3分钟构建个人离线图书馆的终极指南 【免费下载链接】Tomato-Novel-Downloader 番茄小说下载器不精简版 项目地址: https://gitcode.com/gh_mirrors/to/Tomato-Novel-Downloader 还在为小说网站广告太多而烦恼吗?想要随时随地离线…...