基于指数分布算法的无人机航迹规划-附代码
基于指数分布算法的无人机航迹规划
文章目录
- 基于指数分布算法的无人机航迹规划
- 1.指数分布搜索算法
- 2.无人机飞行环境建模
- 3.无人机航迹规划建模
- 4.实验结果
- 4.1地图创建
- 4.2 航迹规划
- 5.参考文献
- 6.Matlab代码
摘要:本文主要介绍利用指数分布算法来优化无人机航迹规划。
1.指数分布搜索算法
指数分布算法原理请参考:https://blog.csdn.net/u011835903/article/details/131025569
2.无人机飞行环境建模
? 环境模型的建立是考验无人机是否可以圆满完成人类所赋予各项任务的基
础和前提,其中第一步便是如何描述规划空间中的障碍物。首先我们将采取函数模拟法模拟地貌特征。其函数表达式为:
z ( x , y ) = s i n ( y + a ) + b s i n ( x ) + c c o s ( d y 2 + x 2 ) + e c o s ( y ) + f s i n ( f y 2 + x 2 ) + g c o s ( y ) (1) z(x,y)=sin(y+a)+bsin(x)+ccos(d\sqrt{y^2+x^2})+ecos(y)+fsin(f\sqrt{y^2+x^2})+gcos(y)\tag{1} z(x,y)=sin(y+a)+bsin(x)+ccos(dy2+x2)+ecos(y)+fsin(fy2+x2)+gcos(y)(1)
其中, ( x , y ) (x, y) (x,y) 为地形上某点投影在水平面上的点坐标, z z z 则为对应点坐标的高度。式中 a , b , c , d , e , f , g a, b, c, d, e, f , g a,b,c,d,e,f,g 是常系数,想要得到不同的地貌特征可以通过改变其常系数的大小,以上建模是作为环境模型的基准地形信息。但为了得到障碍区域我们还需要在这个基准地形上叠加山峰模型,这样就可以模拟像山峰、丘陵等障碍地理信息。山峰模型的数学表达式为:
h ( x , y ) = ∑ i h i e x p [ − ( x − x o i ) 2 a i 2 − ( y − y o i ) 2 b i 2 ] + h o (2) h(x,y)=\sum_ih_iexp[-\frac{(x-x_{oi})^2}{a_i^2}-\frac{(y-y_{oi})^2}{b_i^2}]+h_o \tag{2} h(x,y)=i∑hiexp[−ai2(x−xoi)2−bi2(y−yoi)2]+ho(2)
式 (2)中, h o h_o ho 和 h i h_i hi 分别表示基准地形和第 i i i座山峰的高度, ( x o i , y o i ) (xoi , y oi ) (xoi,yoi)则表示第 i座山峰的中心坐标位置,a i 和 b i 分别是第 i 座山峰沿 x 轴和 y 轴方向的坡度。由式(1)和(2),我们可以得到如下表达式:
Z ( x , y ) = m a x [ z ( x , y ) , h ( x , y ) ] (3) Z(x,y)=max[z(x,y),h(x,y)]\tag{3} Z(x,y)=max[z(x,y),h(x,y)](3)
无人机在躲避障碍物的同时也会经常遇到具有威胁飞行安全的区域,我们称之为威胁区域。这些威胁区域可以是敌人的雷达和防空导弹系统的探测威胁区域也可以是一些其它的威胁,一旦无人机进入这些区域很有可能会被击落或者坠毁。为了简化模型,本文采用半径为 r 的圆柱形区域表示威胁区域,其半径的大小决定威胁区域的覆盖范围。每一个圆柱体的中心位置是对无人机构成最大威胁的地方并向外依次减弱。
3.无人机航迹规划建模
? 在环境建模的基础上,无人机航迹规划需要考虑到在执行复杂任务的过程中自身性能约束要求,合理的设计航迹评价函数才能使得指数分布搜索算法得出的最后结果符合要求,并保证规划出的航迹是有效的。考虑到实际环境中,无人机需要不断适应变化的环境。所以在无人机路径规划过程中,最优路径会显得比较复杂,并包含许多不同的特征。基于实际的情况,本文采用较为复杂的航迹评价函数进行无人机路径规划。影响无人机性能的指标主要包括航迹长度、飞行高度、最小步长、转角代价、最大爬升角等。
? 搜索最佳路径通常与搜索最短路径是密不可分的。在无人机航迹规划过程中,航迹的长度对于大多数航迹规划任务来说也是非常重要的。众所周知,较短的路线可以节省更多的燃料和更多的时间并且发现未知威胁的几率会更低。我们一般把路径定义为无人机从起始点到终点所飞行路程的值,设一条完整的航线有 n n n个节点,其中第 i i i个航路点和第 i + 1 i+1 i+1个航路点之间的距离表示为 l i l_i li ,这两个航路点的坐标分别表示为 ( x i , y i , z i ) (x_i,y_i,z_i ) (xi,yi,zi), ( x i + 1 , y i + 1 , z i + 1 ) (x_{i+1}, y_{i+1},z_{i+1}) (xi+1,yi+1,zi+1)并分别记作 g ( i ) g(i) g(i)和 g ( i + 1 ) g(i+1) g(i+1)。航迹需要满足如下条件:
{ l i = ∣ ∣ g ( i + 1 ) − g ( i ) ∣ ∣ 2 L p a t h = ∑ i = 1 n − 1 l i (4) \begin{cases} l_i = ||g(i+1)-g(i)||_2\\ L_{path}=\sum_{i=1}^{n-1}l_i \end{cases}\tag{4} {li=∣∣g(i+1)−g(i)∣∣2Lpath=∑i=1n−1li(4)
在飞行的过程中会遇到障碍物或者进入威胁区域,如果无人机无法躲避障碍物或者飞入了威胁区域将面临被击落或坠毁的危险以至于无法到达终点,记为 L p a t h = ∞ L_{path}=\infty Lpath=∞,但是无穷函数在实际问题中很难表示,我们采用惩罚的方式进行处理。一般情况下,为了利用地形覆盖自身位置,无人机应尽可能降低高度这可以帮助自身避免一些未知雷达等威胁。但是太低的飞行高度同样会加大无人机同山体和地面的撞击几率,因此设定稳定的飞行高度是非常重要的。飞行高度不应该有太大的变化,稳定的飞行高度可以减少控制系统的负担,节省更多的燃料 。为了使无人机飞行更加安全,给出的飞行高度模型:
{ h h e i g h t = 1 n ∑ i = 0 n − 1 ( z ( i ) − z ‾ ) 2 z ‾ = 1 n ∑ i = 0 n − 1 z ( i ) (5) \begin{cases} h_{height}=\sqrt{\frac{1}{n}\sum_{i=0}^{n-1}(z(i)-\overline{z})^2}\\ \overline{z}=\frac{1}{n}\sum_{i=0}^{n-1}z(i) \end{cases}\tag{5} {hheight=n1∑i=0n−1(z(i)−z)2z=n1∑i=0n−1z(i)(5)
无人机的可操作性也受到其转角代价函数的限制。,在飞行过程中无人机的转角应不大于其预先设定的最大转角,转角的大小会影响其飞行的稳定性。本文的研究中,设定最大转角为 Φ Φ Φ,当前转角为 θ \theta θ并且 a i a_i ai是第 i i i段航路段向量。
{ c o s θ = a i T a i + 1 ∣ a i ∣ ∣ a i + 1 ∣ J t u r n = ∑ i = 1 n ( c o s ( Φ − c o s θ ) ) (6) \begin{cases} cos\theta =\frac{a_i^Ta_{i+1}}{|a_i||a_{i+1}|}\\ J_{turn}=\sum_{i=1}^n(cos(\Phi-cos\theta)) \end{cases}\tag{6} {cosθ=∣ai∣∣ai+1∣aiTai+1Jturn=∑i=1n(cos(Φ−cosθ))(6)
其中, ∣ a ∣ |a| ∣a∣代表矢量 a a a的长度。
? 通过对以上三个方面建立了无人机航迹规划的代价函数,可以得出本文的航迹评价函数如下:
J c o s t = w 1 L p a t h + w 2 h h e i g h t + w 3 J t u r n (7) J_{cost}=w_1L_{path}+w_2h_{height}+w_3J_{turn} \tag{7} Jcost=w1Lpath+w2hheight+w3Jturn(7)
其中, J c o s t J_{cost} Jcost是总的代价函数,参数 w i w_i wi , i = 1 , 2 , 3 i=1,2,3 i=1,2,3 表示每个代价函数的权值,且满足如下条件:
{ w i ≥ 0 ∑ i = 1 3 w i = 1 (8) \begin{cases} w_i\geq0 \\ \sum_{i=1}^3 w_i=1 \end{cases} \tag{8} {wi≥0∑i=13wi=1(8)
通过对总的代价函数进行有效地处理,我们可以得到由线段组成的航迹。不可否认的是得到的路径往往是仅在理论上可行,但为了实际可飞,有必要对航迹进行平滑处理。本文采用三次样条插值的方法对路径进行平滑。
4.实验结果
4.1地图创建
设置地图参数a, b, c, d, e, f , g=1。地图大小为:200*200。设置三个山峰,山峰信息如表1所示。威胁区域信息如表2所示
| 信息 | 山峰中心坐标 | 山峰高度 | 山峰X方向坡度 | 山峰y方向坡度 |
|---|---|---|---|---|
| 山峰1 | [60,60] | 50 | 20 | 20 |
| 山峰2 | [100,100] | 60 | 30 | 30 |
| 山峰3 | [150,150] | 80 | 20 | 20 |
| 信息 | 威胁区域中心坐标 | 威胁区域半径 |
|---|---|---|
| 威胁区域1 | [150,50] | 30 |
| 威胁区域2 | [50,150] | 20 |
创建的地图如下:

4.2 航迹规划
设置起点坐标为[0,0,20],终点坐标为[200,200,20]。利用指数分布算法对航迹评价函数式(7)进行优化。优化结果如下:


从结果来看,指数分布算法规划出了一条比较好的路径,表明算法具有一定的优势。
5.参考文献
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.DOI:10.27012/d.cnki.gdhuu.2020.000178.
6.Matlab代码
相关文章:
基于指数分布算法的无人机航迹规划-附代码
基于指数分布算法的无人机航迹规划 文章目录 基于指数分布算法的无人机航迹规划1.指数分布搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用指数分布算法来优化无人机航迹规划。 …...

vite基础学习笔记:13.Dialog 对话框 (用户注册与登录)
说明:自学做的笔记和记录,如有错误请指正 1. Dialog 对话框组件 目标效果:点击“登录/注册”,弹框 (1)创建全局组件,在官网中查询代码粘贴 (2) 注册和使用全局组件 &a…...

RedisTemplate 使用 pipeline 时需要注意的问题
RedisTemplate 使用 pipeline 时需要注意的问题 RedisTemplate 使用 pipeline 进行批量 set 时,需要把 key 和 value 都转为字节 1. 直接使用 getBytes() 转为字节,在读取数据时,会抛出以下序列化异常 //错误代码 protected void process(…...

uniapp 下载文件到手机
下载后端传递过来的文件 let thil this uni.showLoading({title: 下载中,mask:true }) uni.downloadFile({url: 接口地址, //仅为示例,并非真实的资源header: {"Authorization": token},responseType: blob,success: (res) > {if (res.statusCode 2…...

使用Drupal管理小型项目?试试Docker快速部署Drupal结合内网穿透实现远程访问
🎬 鸽芷咕:个人主页 🔥个人专栏:《Linux深造日志》《C干货基地》 ⛺️生活的理想,就是为了理想的生活! 文章目录 前言1. Docker安装Drupal2. 本地局域网访问3 . Linux 安装cpolar4. 配置Drupal公网访问地址5. 公网远程访问Drupal…...
BSP-STM32移植FreeRTOS
在stm32裸机工程中的Middlewares目录添加freeRtos源码 在裸机工程中的main中调用freertos接口...
【Spring】Spring IOCDI(万字详解)
文章目录 1. Spring是什么?2. 认识IOC2.1 传统程序开发1. Main.java2. Car.java3. Framework.java4. Bottom.java5. Tire.java 2.2 分析传统开发2.3 IOC程序开发1. Main.java2. Car.java3. Framework.java4. Bottom.java5. Tire.java 2.4 分析IOC开发2.5 IOC容器优点…...

ts 使用泛型来做类型映射
使用泛型来做类型映射,将对象(或数组)中类型转换为另一个类型 首先,定义一个类型Student // 定义一个类型Studentinterface Student {name: string,age: number}1、把Student的所有属性都变为可空的 type Nullable<T> {[p in keyof T]: T[p] || …...

Compose - 使用 Paging
一、添加依赖 查看官方最新版本 val paging_version "3.2.1" implementation("androidx.paging:paging-runtime:$paging_version") implementation("androidx.paging:paging-compose:$paging_version") 二、定义数据源 PagingSource 是对其它…...

数据结构与算法-(11)---有序表(OrderedList)
🌈个人主页: Aileen_0v0 🔥系列专栏:PYTHON学习系列专栏 💫"没有罗马,那就自己创造罗马~" 目录 知识回顾及总结 有序表的引入 编辑 实现有序表 1.有序表-类的构造方法 2.有序表-search方法的实现 3.有序表-add方法的实现…...
佳易王会员管理系统软件如何下载,基本功能有哪些
一、佳易王会员管理软件大众版 部分功能简介: 1、会员信息登记 :可以直接使用手机号登记,也可以使用实体卡片,推荐用手机号即可。 2、会员卡类型 :可以自由设置卡的类型,比如:充值卡、计次卡、…...

docker搭建mysql环境
1. 基础环境 名称描述CentOS 7.6Linux操作系统版本docker 20.10.5docker版本mysql 8.0.29mysql镜像版本 2. 下载安装 使用docker命令下载mysql镜像 [rootzhouwei ~]# docker pull mysql:8.0.29查看docker仓库是否已经下载了mysql镜像 [rootzhouwei ~]# docker images将mys…...

优思学院|推行精益六西格玛困难重重?7大原因分析助你避坑
六西格玛,是一种让企业在绩效管理的舞台上跳得更高更远的方法。它不仅仅是一套原则和技术,更是一种对完美的执着追求。 在这个舞台上,企业的流程管理得以严格、集中,质量得以高效提升。优思学院总结出六西格玛的核心是࿱…...

四川思维跳动商务信息咨询有限公司可信吗?
在今天的数字化时代,抖音带货已成为一种全新的商业模式。许多公司都在通过这种形式进行产品推广和销售,其中,四川思维跳动商务信息咨询有限公司以其专业的服务和良好的信誉,在抖音带货领域赢得了广泛赞誉。 四川思维跳动商务信息…...

高防CDN与高防服务器:谁更胜一筹?
在当今数字化世界中,网络安全对于保护网站和应用程序至关重要。在这一背景下,高防CDN和高防服务器是两种流行的解决方案,用于应对不同类型的网络攻击。本文将分析高防CDN是否能够替代高防服务器,以及它们各自的优势和限制。 高防C…...

2.Netty简单应用
引入Maven依赖 <dependency> <groupId>io.netty</groupId> <artifactId>netty-all</artifactId><version>4.1.49.Final</version> </dependency>服务端的管道处理器 public class NettyServerHandler extends ChannelInbou…...
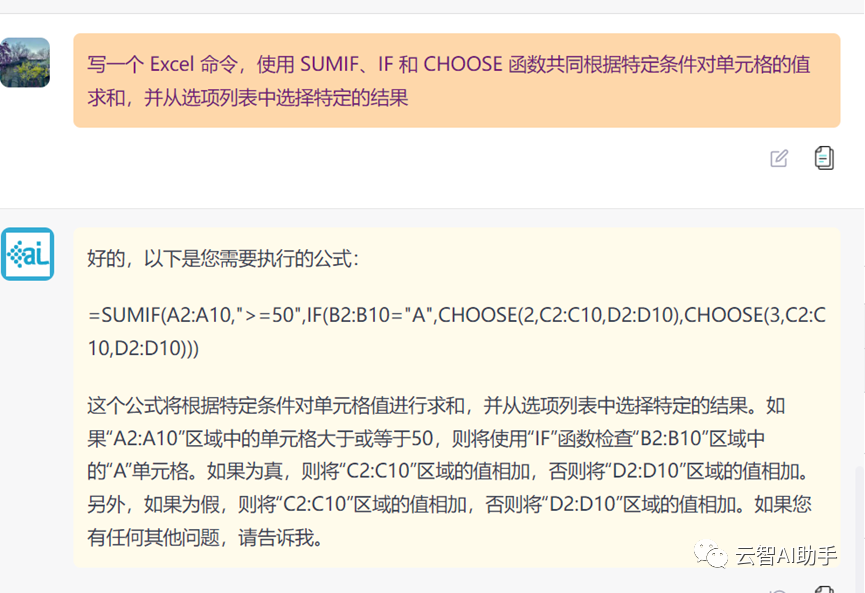
80个10倍提升Excel技能的ChatGPT提示
你是否厌倦了在使用Excel时感觉像个新手?你是否想将你的技能提升到更高的水平,成为真正的Excel大师?嗯,如果你正在使用ChatGPT,那么成为Excel专家简直易如反掌。 你只需要了解一些最有用的Excel提示,就能在…...

jenkins结合k8s部署动态slave
1、完成k8s连接 在完成jenkins的部署后现安装kubernets的插件 如果jenkins 是部署在k8s集群中只需要填写一下 如果是非本集群的部署则需要填写证书等 cat ./config echo ‘certificate-authority-data-value’ | base64 -d > ./ca.crt echo ‘client-certificate-data’ |…...
搜索引擎Elasticsearch基础与实践
倒排索引 将文档中的内容分词,然后形成词条。记录每条词条与数据的唯一表示如id的对应关系,形成的产物就是倒排索引,如下图: ElasticSearch数据的存储和搜索原理 这里的索引库相当于mysql中的database。一个文档(do…...

vue项目electron打包
1.设置国内镜像 npm config edit 命令行输入后会弹出npm的配置文档,需要文档末尾加入 electron_mirrorhttps://npm.taobao.org/mirrors/electron/ electron-builder-binaries_mirrorhttps://npm.taobao.org/mirrors/electron-builder-binaries/ 2.全局安装electron …...

告别软件SPI!用STM32硬件SPI+DMA刷新中景园ST7789,释放CPU性能实测
STM32硬件SPIDMA驱动ST7789屏幕实战:性能优化全解析 对于嵌入式开发者而言,显示性能往往是系统瓶颈之一。当我在一个需要实时显示心电图波形的医疗设备项目中使用软件SPI驱动ST7789屏幕时,发现CPU占用率高达70%,这直接影响了其他关…...

别再让MOSFET悄悄“累死”!聊聊开关电源里那个看不见的杀手:重复雪崩EAR
揭秘MOSFET的隐形杀手:如何驯服开关电源中的重复雪崩效应 当你在深夜调试一块开关电源板时,是否遇到过MOSFET莫名其妙失效的情况?那些看似健康的器件,运行几个月后突然"罢工",留下的只有烧毁的痕迹和一堆问号…...

EdgeRemover:Windows系统Edge浏览器自动化管理终极方案
EdgeRemover:Windows系统Edge浏览器自动化管理终极方案 【免费下载链接】EdgeRemover A PowerShell script that correctly uninstalls or reinstalls Microsoft Edge on Windows 10 & 11. 项目地址: https://gitcode.com/gh_mirrors/ed/EdgeRemover Edg…...

ThinkPad风扇控制终极指南:用TPFanCtrl2告别噪音与高温烦恼
ThinkPad风扇控制终极指南:用TPFanCtrl2告别噪音与高温烦恼 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 还在为ThinkPad笔记本风扇的"直升机"…...

键盘幽灵键终结者:Keyboard Chatter Blocker深度配置指南
键盘幽灵键终结者:Keyboard Chatter Blocker深度配置指南 【免费下载链接】KeyboardChatterBlocker A handy quick tool for blocking mechanical keyboard chatter. 项目地址: https://gitcode.com/gh_mirrors/ke/KeyboardChatterBlocker 当你的机械键盘开始…...

高级PCB封装设计:别再堆工艺,这4项技术才是量产关键
不少采购与项目经理发现:同样的高端芯片,有的厂一次打样成功、量产良率 99.5%,有的厂反复改版、良率不足 90%,交期一拖再拖。问题不在设备精度,而在高级 PCB 封装设计技术是否真正落地。很多团队把 “高级” 等同于 HD…...

3分钟掌握APK安装器:Windows上运行安卓应用的终极方案
3分钟掌握APK安装器:Windows上运行安卓应用的终极方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 想在Windows电脑上直接运行安卓应用吗?告…...

创新智能抢票引擎:cppTickerBuy如何让CPP漫展门票轻松到手
创新智能抢票引擎:cppTickerBuy如何让CPP漫展门票轻松到手 【免费下载链接】cppTickerBuy cpp cp30 漫展 活动 抢票 无差别 同人展 项目地址: https://gitcode.com/gh_mirrors/cp/cppTickerBuy 还在为热门漫展门票秒光而烦恼吗?传统手动抢票总在最…...

Akagi雀魂AI辅助工具:终极免费麻将学习指南,快速提升段位的简单教程
Akagi雀魂AI辅助工具:终极免费麻将学习指南,快速提升段位的简单教程 【免费下载链接】Akagi 支持雀魂、天鳳、麻雀一番街、天月麻將,能夠使用自定義的AI模型實時分析對局並給出建議,內建Mortal AI作為示例。 Supports Majsoul, Te…...

3步修复损坏视频:使用Untrunc轻松恢复珍贵回忆
3步修复损坏视频:使用Untrunc轻松恢复珍贵回忆 【免费下载链接】untrunc Restore a truncated mp4/mov. Improved version of ponchio/untrunc 项目地址: https://gitcode.com/gh_mirrors/un/untrunc 你是否曾经遇到过视频文件损坏的情况?那些珍贵…...