调试 Mahony 滤波算法的思考 10
调试 Mahony 滤波算法的思考
- 1. 说在前面的
- 2.Mahony滤波算法的核心思想
- 3. 易懂的理解 Mahony 滤波算法的过程
- 4. 其他的一些思考
- 5. 民间 9轴评估板
1. 说在前面的
之前调试基于QMI8658 6轴姿态解算的时候,我对Mahony滤波的认识还比较浅薄。初次的学习和代码的移植让我对四元数、欧拉角、旋转余弦矩阵有了一定的接触。然而,直到我将地磁传感器加入到我的硬件,进行9轴姿态解算时,我深深地感受到对四元数与姿态阵之间关系的理解是非常重要的。在此之前,我检索了网络文章,并记录了《MEMS_惯性传感器09 - Mahony姿态解算算法详解》、《MEMS_惯性传感器14 - Mahony滤波算法的代码分析》两篇文章。可能对于大佬、资深工程师来说,这些文章的严谨性不够,可能会误导别人。但我必须承认,我仍然没有扎实的数学计算研究背后更深层次的理论。即使如此,我依然希望通过自己的努力在惯性导航算法上学习得更深入一些。同时,我也想多记录一些学到的知识,多记录一些自己的理解和思考。希望这些记录能帮助到一些初学者。如果我的文章有错误的引导,我非常希望大佬们能够指正,因为这对我来说是最大的收获,我非常乐意倾听和学习。
我愿意自我突围,向着理想前进!
这次学习检索时发现了一个博文内容硬核、有理有据的博主1路痴导航员。 她的博文 《AHRS互补滤波(Mahony)算法及开源代码》对我帮助很大。
2.Mahony滤波算法的核心思想
Mahony滤波算法的核心思想是通过将角速度和角度的测量值与历史估计值进行加权平均,从而得到更加准确的姿态估计结果。同时,滤波算法还利用加速度计的测量值来纠正姿态角度的漂移。
该算法也存在一些缺点,例如对于快速旋转和加速度变化较大的情况,其姿态估计结果可能会出现较大的误差。
3. 易懂的理解 Mahony 滤波算法的过程
为了更好的理解,表达是先不用矩阵的思想,在算法的实现的过程中,需要将表达是转换成矩阵形式。
① 根据陀螺仪的测量数据计算出角速度的增量,即:
Δθ = 0.5 * (gyro + bias) * Δt
其中,gyro表示陀螺仪的测量值,bias表示陀螺仪的零偏误差,Δt表示时间间隔。
② 根据加速度计的测量数据计算出重力方向的估计值,即:
g_est = q * (0, 0, -1) * q^-1
其中,q表示四元数的姿态估计值。
③ 根据加速度计的测量数据和重力方向的估计值,计算出加速度计的误差,即:
acc_err = acc_meas - g_est
其中,acc_meas表示加速度计的测量值。
④ 根据角速度的增量和加速度计的误差,更新四元数的姿态估计值,即:
q = q * exp(Δθ - K * acc_err)
其中,K为控制增益。
4. 其他的一些思考
-
传感器EVB板的测量数据以载体坐标系(b-框架)表示。 欧拉角的直观表示描述了地理坐标系中的角度,其中包括重力的影响。 地理坐标系中的重力矢量为[0,0,1]g,磁传感器将地球磁场中的强度表示为[cos(θ),0,sin(θ)]guess。因此,在算法中,加速度和磁数据被归一化,确保它们的模是一定大小的。
-
四元数从地理坐标系(东北天)转换到载体坐标系,就得到了旋转矩阵Cnb。
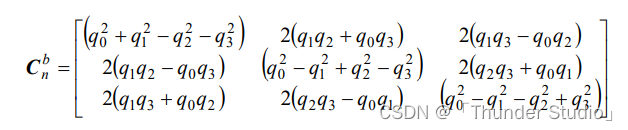
Cnb的最后一列取负,即将其转换为载体坐标系中的值。在理想情况下,如果没有误差,这个矢量应该与测量值相等。然而,由于这两者总会存在差异,因此我们需要利用它们之间的差值来修正陀螺仪更新的不准确性。 -
在修正的过程中,我们认为加速度计测量的可信度较高,还需要使用地磁传感来修正加速度传感的Z轴。磁力计的模的长度是确定的,但是两个分量的具体大小无法像重力加速度一样确定。因此,我们使用上一次的四元数得到的Cbn(从载体到地理坐标系的旋转矩阵)来计算测量的磁场强度。理论上,此刻的Cbn应该在东向上的分量是零[cos(θ),0,sin(θ)],而北向和地向会有分量。然而,由于此刻的Cbn尚未得到,我们使用的是上一次的Cbn,并加上一些测量误差,导致东向上仍会有分量存在。为了处理这种情况,我们将xy平面的分量合成到一个方向上,使得y轴上的分量为0。这样,处理后的地磁信息的地位就与重力加速度(0,0,-1)相似了。
-
根据余弦矩阵和欧拉角的定义,我们可以将地理坐标系的重力向量转换到载体坐标系中。具体而言,将四元数转换成方向余弦矩阵后,我们可以得到方向余弦矩阵的第三列的三个元素,即vx、vy和vz。这三个元素实际上表示了当前欧拉角(即四元数)在载体坐标系上换算得到的重力单位向量。
vx = 2*(q1q3 - q0q2);
vy = 2*(q0q1 + q2q3);
vz = q0q0 - q1q1 - q2q2 + q3q3;
- ax\ay\az是载体坐标参照系上,加速度计测出来的重力向量。vx\vy\vz是陀螺积分后的姿态推算出的重力向量。它们之间的误差向量ex\ey\ez是陀螺积分后的姿态和加计测出来的姿态之间的误差。误差向量可以用向量叉积来表示。叉积向量ex\ey\ez位于载体坐标系上,且其大小与陀螺积分误差成正比,可用于纠正陀螺。由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对载体坐标系的纠正。
exInt = exInt + ex * Ki * halfT;
eyInt = eyInt + ey * Ki * halfT;
ezInt = ezInt + ez * Ki * halfT;
// 用叉积误差来做PI修正陀螺零偏
gx = gx + Kpex + exInt;gy = gy + Kpey + eyInt;
gz = gz + Kp*ez + ezInt;
矢量之间的叉乘公式为err = A × B = |A| × |B| × sin(β)。当两个矢量重合时,误差为零,表示没有差异。当两个矢量之间夹角为90°时,误差达到最大值,表示差异最大。然而,在夹角为90°附近的区间内,误差的变化是非线性的,这可能导致一些准确性问题。
5. 民间 9轴评估板
QMI8658+QMC5883L 链接



路痴导航员: ↩︎
相关文章:
调试 Mahony 滤波算法的思考 10
调试 Mahony 滤波算法的思考 1. 说在前面的2.Mahony滤波算法的核心思想3. 易懂的理解 Mahony 滤波算法的过程4. 其他的一些思考5. 民间 9轴评估板 1. 说在前面的 之前调试基于QMI8658 6轴姿态解算的时候,我对Mahony滤波的认识还比较浅薄。初次的学习和代码的移植让…...
Bean——IOC(Github上有代码)
源码 https://github.com/cmdch2017/Bean_IOC.git 获取Bean对象 BeanFactory Bean的作用域 第三方Bean需要用Bean注解 比如消息队列项目中,需要用到Json的消息转换器,这是第三方的Bean对象,所以不能用Component,而要用Bean …...
功能更新|Leangoo领歌免费敏捷工具支持SAFe大规模敏捷框架
Leangoo领歌是一款永久免费的专业的敏捷开发管理工具,提供端到端敏捷研发管理解决方案,涵盖敏捷需求管理、任务协同、进展跟踪、统计度量等。 Leangoo可以支持敏捷研发管理全流程,包括小型团队敏捷开发,规模化敏捷SAFe…...
漏刻有时百度地图API实战开发(1)华为手机无法使用addEventListener click 的兼容解决方案
漏刻有时百度地图API实战开发(1)华为手机无法使用addEventListener click 的兼容解决方案漏刻有时百度地图API实战开发(2)文本标签显示和隐藏的切换开关漏刻有时百度地图API实战开发(3)自动获取地图多边形中心点坐标漏刻有时百度地图API实战开发(4)显示指定区域在移动端异常的解…...

交流信号继电器 DX-31BJ/AC220V JOSEF约瑟 电压启动 面板嵌入式安装
DX系列信号继电器由矩形脉冲激磁,磁钢保持。本继电器为双绕组。工作线圈可为电压型,亦可为电流型。复归线圈为电压型。继电器的工作电流或工作电压为长脉冲,亦可为脉冲不小于20mS的短脉冲。 系列型号 DX-31B信号继电器DX-31BJ信号继电器 D…...
SpringCloudAlibaba系列之Nacos配置管理
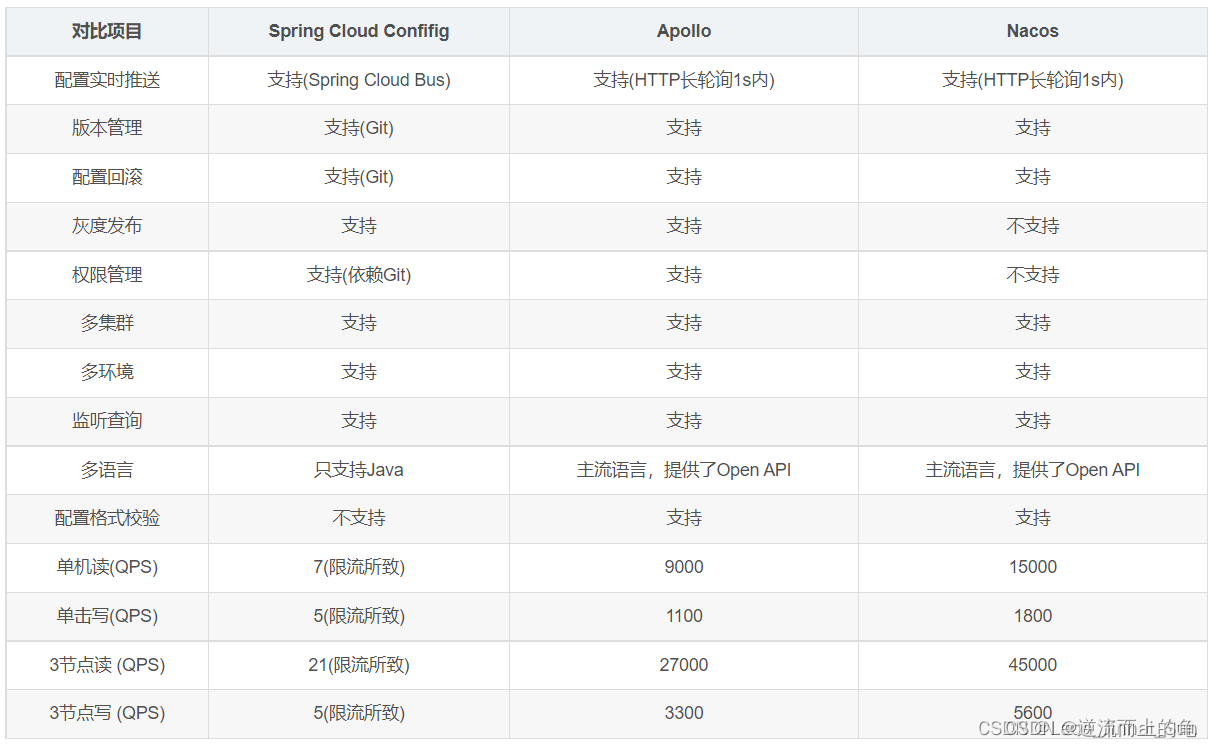
目录 说明 认识配置中心 Nacos架构图 Nacos配置管理实现原理 核心源码分析-客户端 核心源码分析-服务端 配置修改的实时通知 主流配置中心对比 小小收获 说明 本篇文章主要目的是从头到尾比较粗粒度的分析Nacos配置中心的一些实现,很多细节没有涉及&#…...

Kyligence Copilot 亮相第六届进博会,增添数智新活力
11月5日,第六届中国国际进口博览会(以下简称“进博会”)在上海国家会展中心盛大启幕,众多新科技、新成果、新展品亮相本届进博会。作为阿斯利康(AstraZeneca)合作伙伴,跬智信息(Kyli…...

MySQL 批量修改表的列名为小写
1、获取脚本 SELECT concat( alter table , TABLE_NAME, change column , COLUMN_NAME, , lower( COLUMN_NAME ), , COLUMN_TYPE, comment \, COLUMN_COMMENT, \; ) AS 脚本 FROM information_schema.COLUMNS WHERE TABLE_SCHEMA 数据库名 and TABLE_NAME表名-- 大写是up…...

ElasticSearch 查询方法示例 java
public List<PricePolicyConditionDTO> queryEs(OrderPriceOutDTO param, List<String> materialCodeList, List<String> categoryCodeList) {BoolQueryBuilder mainQueryBoolBuilder new BoolQueryBuilder();//销售组织if (CharSequenceUtil.isNotEmpty(pa…...

5G毫米波通信中的关键技术
随着5G技术的快速发展,毫米波通信作为其中的一项重要技术,在高速数据传输、低延迟通信和大规模连接等方面具有显著的优势。本文将探讨5G毫米波通信中的关键技术,包括毫米波频段的选择、信号处理技术和MIMO技术等。 一、毫米波频段的选择 毫米…...
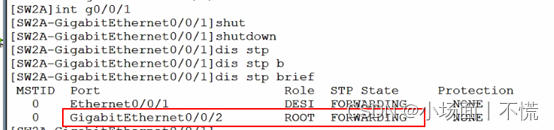
2.3.3 交换机的RSTP技术
实验2.3.3 交换机的RSTP技术 一、任务描述二、任务分析三、具体要求四、实验拓扑五、任务实施1.交换机的基本配置。2.开启交换机的STP。3.配置SW3A和SW3B上STP的优先级。将SW3A配置为根交换机,SW3B配置为备用根交换机。4.配置SW2A和SW2B的边缘接口 六、任务验收七、…...

国外访问学者/博士后留学人员反诈骗指南
访问学者/博士后/联合培养博士人员出国后,对当地环境及政策不熟悉,需要提高防范意识,为此,知识人网小编特整理这篇反诈骗指南,提醒留学人员防微杜渐、未雨绸缪。 近日,多国使馆发布相关提醒:不法…...
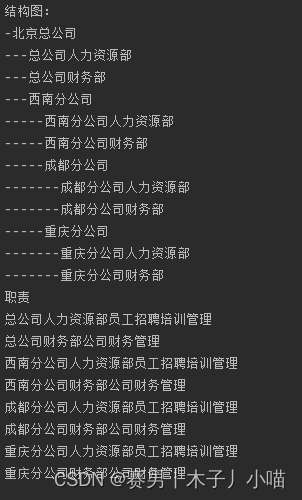
设计模式之组合模式-创建层次化的对象结构
目录 概述概念主要角色应用场景 组合模式的实现类图NS图基本代码组合模式的精髓意外收获(❀❀) 应用示例-公司组织架构管理需求结构图代码 组合模式的优缺点优点缺点 总结 概述 概念 组合模式是一种结构型设计模式,它允许将对象组合成树形结…...

Windows 有趣功能集锦
Windows 有趣功能集锦 隐藏文件或文件夹 CMD 运行以下命令隐藏 # attrib h <文件或文件夹名称> attrib r h s a 测试显示 # attrib h <文件或文件夹名称> attrib -r -h -s -a 测试使视频显示为图片 准备一个视频文件和一个需要显示的图片先将视频压缩成压缩文…...

【nodejs版playwright】02-支持多套测试环环境执行用例
日常测试中,一套测试用例需支持在不同的测试环境运行,如staging、production 因为涉及不同的测试环境,那使用的环境变量或参数就不一样,如staging登录可能用到的用户名是A,而production可能用到的是b。 所以需要有一个…...
)
React高阶组件(Higher-Order Components, HOCs)
React 高阶组件 (Higher Order Components, HOCs) 是一种模式,让组件具备一定的扩展能力。它是函数式编程思想在 React 应用程序中的体现。HOCs 可以让你重用组件,提高组件的可复用性。 HOCs 是什么? 高阶组件实际上是一个函数,…...
利用RoboBrowser库和爬虫代理实现微博视频的爬取
技术概述 微博是一个社交媒体平台,用户可以在上面发布和分享各种内容,包括文字、图片、音频和视频。微博视频是微博上的一种重要的内容形式,有时我们可能想要下载微博视频到本地,以便于观看或分析。但是,微博视频并没…...
使用Redis实现缓存及对应问题解决
一、为什么需要Redis作缓存? 在业务场景中,如果有些数据需要极高频的存取,每次都要在mysql中查询的话代价太大,假如有一个存在于客户端和mysql之间的存储空间,每次可以在这空间中进行存取操作,就会减轻mys…...

【穿透科技】P2P穿透模块介绍
P2P穿透+一站式音视频解决方案路过看风景P2P隧道模块(pgLibTunnel) 1.功能介绍 P2P隧道是在Peergine中间件基础上实现的一个TCP隧道应用(通过P2P来传输TCP流量),包括服务器和客户端程序。它可以协助从公网或者从另一私网访问某个私网内部的计算机和网络设备。其优点是无需…...

中国第二批,11个大模型备案获批
加上首批的 10 余个大模型,目前已有超过 20 个大模型获得审批。 据钛媒体独家报道,国内第二批通过备案的AI大模型包括11家公司,部分已面向全社会开放服务。加上首批的10余个大模型,目前已有超过20个大模型获得备案。 新一批备案…...

5分钟搞定PowerToys中文版:让Windows效率工具说你的语言
5分钟搞定PowerToys中文版:让Windows效率工具说你的语言 【免费下载链接】PowerToys-CN PowerToys Simplified Chinese Translation 微软增强工具箱 自制汉化 项目地址: https://gitcode.com/gh_mirrors/po/PowerToys-CN 你是不是也曾经面对PowerToys强大的功…...

PumpClaw:为AI智能体构建去中心化收入基础设施的完整指南
1. 项目概述:为AI智能体构建自主收入基础设施在区块链和人工智能的交汇点上,一个核心的挑战日益凸显:自主运行的AI智能体如何像人类一样,拥有可持续的、无需许可的收入来源?传统的商业模式依赖于中心化的支付网关、繁琐…...

ncmdump终极指南:3分钟掌握网易云音乐NCM格式转换技巧
ncmdump终极指南:3分钟掌握网易云音乐NCM格式转换技巧 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾遇到过从音乐平台下载的歌曲无法在其他设备播放的困扰?ncmdump作为一款专业的音频格式转换工具&…...

Yew Context API:组件间数据传递的终极指南
Yew Context API:组件间数据传递的终极指南 【免费下载链接】yew Rust / Wasm framework for creating reliable and efficient web applications 项目地址: https://gitcode.com/gh_mirrors/ye/yew Yew是一个基于Rust和WebAssembly的现代Web框架,…...

Elden Ring FPS解锁工具:完整指南与实用技巧
Elden Ring FPS解锁工具:完整指南与实用技巧 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenRingFps…...

无需网络依赖:Hunyuan-MT 7B纯本地翻译方案搭建教程
无需网络依赖:Hunyuan-MT 7B纯本地翻译方案搭建教程 1. 项目背景与核心优势 在全球化协作日益频繁的今天,语言障碍仍然是跨文化交流的主要瓶颈。传统在线翻译服务存在三大痛点:网络依赖导致离线场景不可用、商业API存在隐私泄露风险、小语种…...

Hunyuan-OCR-WEBUI优化升级:vLLM加速推理,性能提升实测
Hunyuan-OCR-WEBUI优化升级:vLLM加速推理,性能提升实测 1. 引言:OCR推理加速的新选择 在AI应用落地的过程中,推理速度往往是决定用户体验的关键因素。腾讯混元OCR(Hunyuan-OCR)作为一款轻量级多模态OCR模…...
——类与对象(超详细))
C++基础(九)——类与对象(超详细)
家人们好呀!!! 前面,我们带着计算机一路闯关,你的编程工具箱已经塞得满满当当,但不知你有没有察觉到一丝烦恼:当程序越写越大,变量和函数散落一地,像极了一个堆满杂物的车库——什么都有,但找起来费劲,改起来更费劲。 有没有办法把相关的数据和操作“打包”在一起…...

轻量级知识库引擎Lore:文件驱动架构与自托管部署实践
1. 项目概述:一个为现代应用设计的轻量级知识库引擎最近在折腾个人项目和团队内部文档时,我又一次被那些“重量级”的知识库系统给劝退了。要么是部署复杂,对服务器资源要求高;要么是功能过于臃肿,90%的功能都用不上&a…...

Arm系统缓存组架构与CCIX端口聚合配置详解
1. Arm系统缓存组架构解析在现代处理器架构中,系统缓存组(System Cache Group, SCG)是提升内存访问效率的核心组件。以Arm架构为例,其通过分布式缓存节点设计实现了低延迟的数据访问。每个SCG包含多个SN(Subordinate Node)节点,这些节点通过哈…...