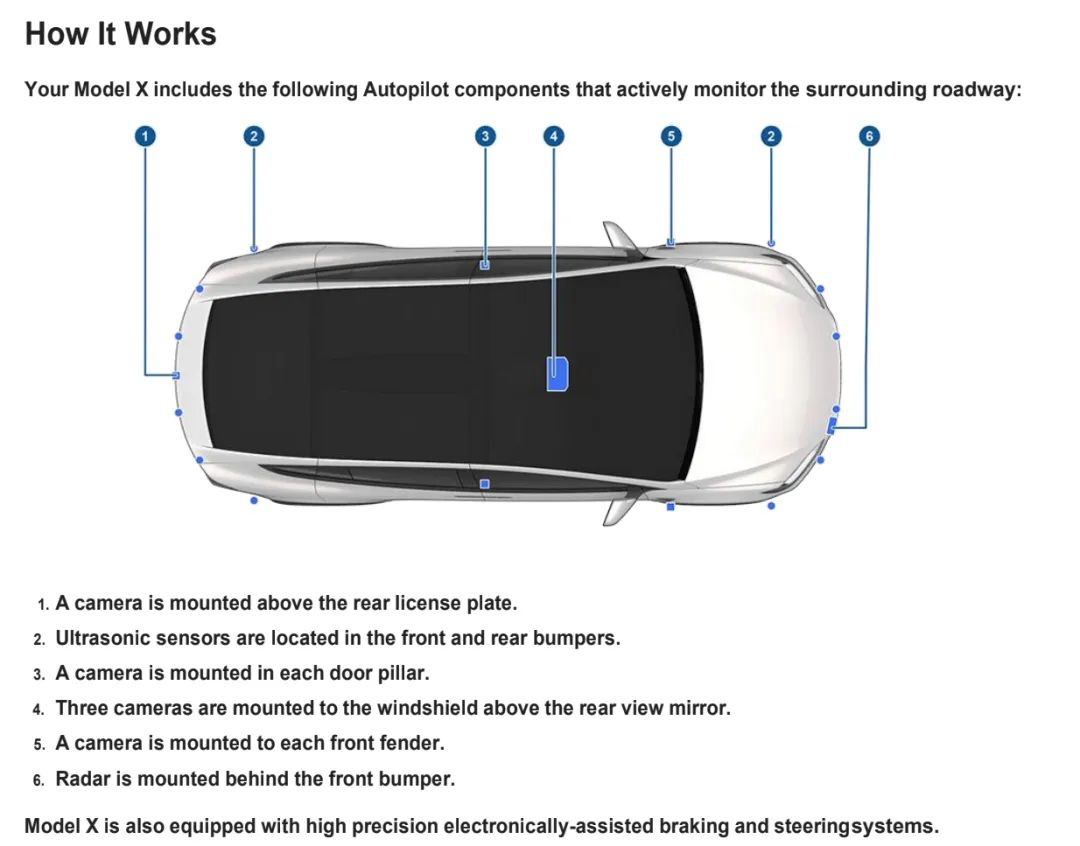
特斯拉4D雷达方案首次曝光!高阶智驾市场比拼安全冗余
随着L2级智能驾驶进入普及阶段,L3/L4级赛道正在成为各家车企的下一个竞争焦点。背后的最大难题,就是如何在成本可控的前提下,保证足够的安全。
高工智能汽车研究院监测数据显示,2022年度中国市场(不含进出口)乘用车前装标配搭载辅助驾驶(L0-L2)交付1001.22万辆,首次突破千万辆规模,同时,前装搭载率也首次突破50%大关。
其中,L2级辅助驾驶(含L2+)前装标配交付585.99万辆,同比增长61.66%,前装搭载率升至29.40%。高阶辅助驾驶方面,NOA前装标配搭载交付达到21.22万辆,首次突破20万辆大关(前装搭载率为1.06%),同比增长接近80%。
而在今年1月,中国市场新能源汽车前装标配搭载L2级辅助驾驶交付16.88万辆,搭载率进一步升至58.03%。从数字对比来看,新能源汽车细分赛道,智能化的竞争已经白热化。
其中,智能驾驶又是智能化功能配置中差异化最大的部分,相比座舱,仍然存在很多未知数。
就在近日,特斯拉公司的前联合创始人Martin Eberhard公开喊话,“这项技术(FSD)还太不成熟,还不能投入使用。漏洞百出的软件,带来的是巨大的安全风险。”
几周前,美国国家公路交通安全管理局(NHTSA)宣布,特斯拉将召回近37万辆已安装或待安装全自动驾驶测试版(FSD Beta)的多款车型,原因是涉及安全事故风险。而特斯拉预计将在4月15日之前以OTA升级方式进行召回。
Martin Eberhard表示,在他看来,将智能汽车视为软件平台是错误的。“智能手机的软件更新背后,很多漏洞往往是因为系统存在崩溃的可能性。对手机来说,这不是什么大问题,但对于汽车来说,可能是致命的Bug。”
此外,在今年的美国超级碗(美国职业橄榄球大联盟年度总决赛)活动期间,特斯拉知名“黑粉”丹·奥多德和他创办的组织“黎明计划”投放了一段广告(开启FSD的特斯拉Model 3在人行道撞倒假人),并警告美国人注意特斯拉的FSD功能,“这是市场上最糟糕,设计、开发和测试最不合格的汽车产品。”
这背后,另一个关键原因是特斯拉在过去几年坚持的「纯视觉」感知路线,而其他同行则是通过更多的毫米波雷达、激光雷达等组合感知来实现安全冗余。
有意思的是,广告播出的当晚,马斯克正在超级碗现场观看比赛。随后,他在一条推文中表示,广告将“大大提高公众对特斯拉可以实现自动驾驶的认识。”
而对于特斯拉来说,FSD功能还处于进化阶段。
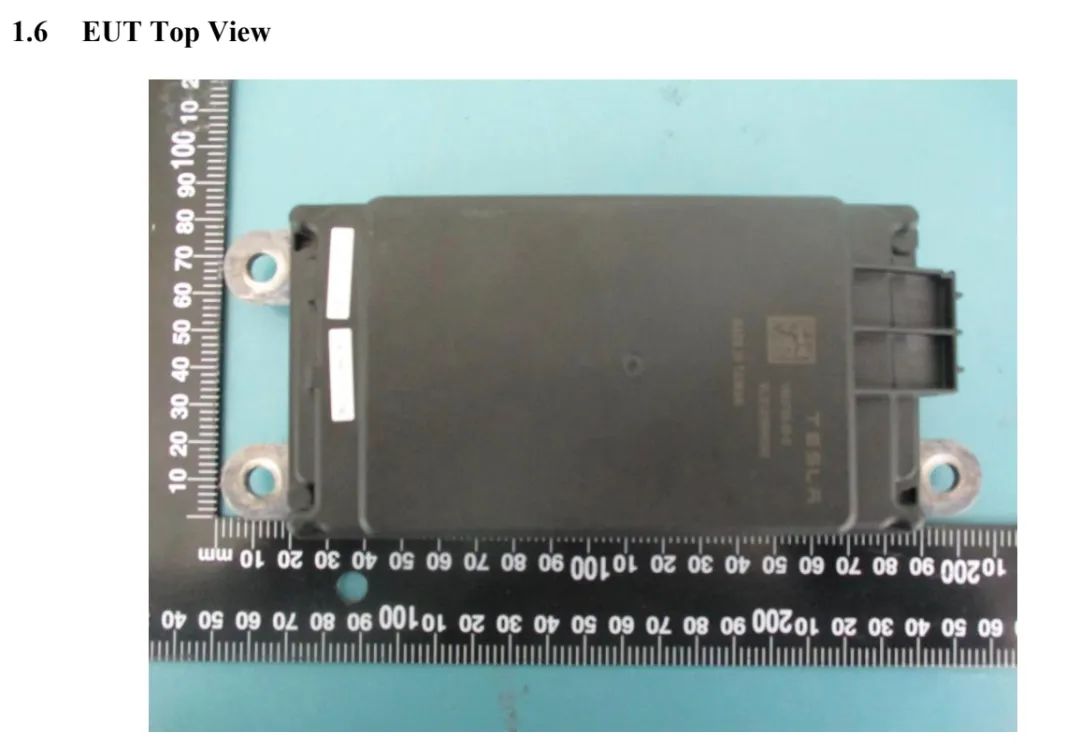
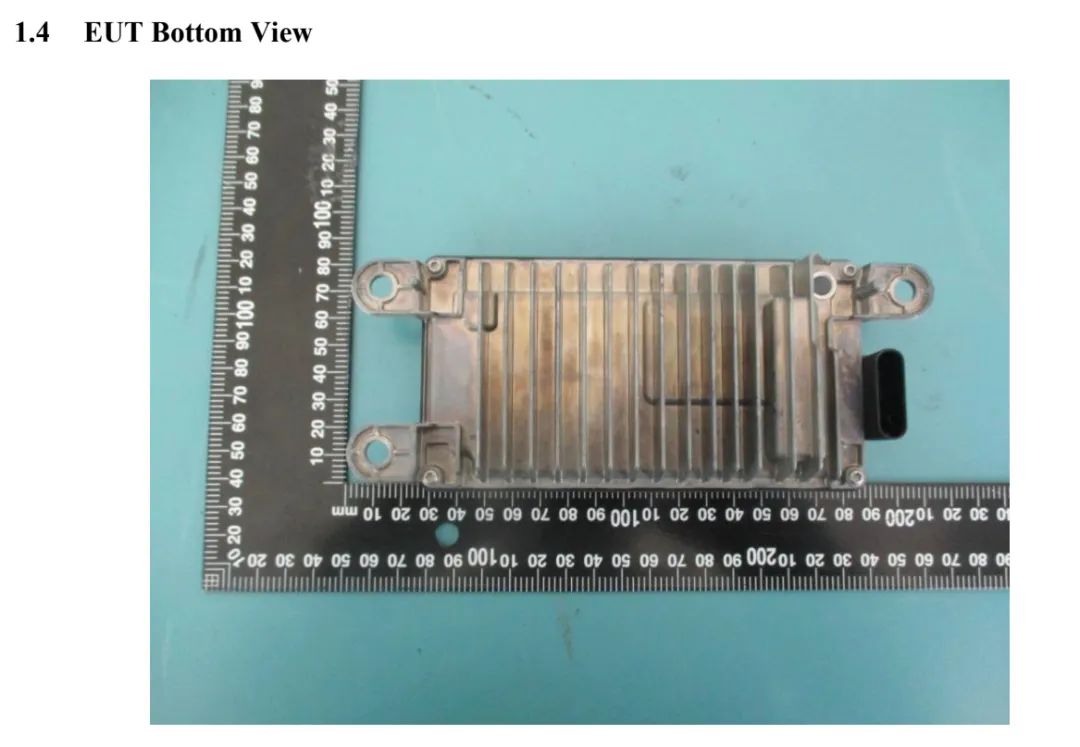
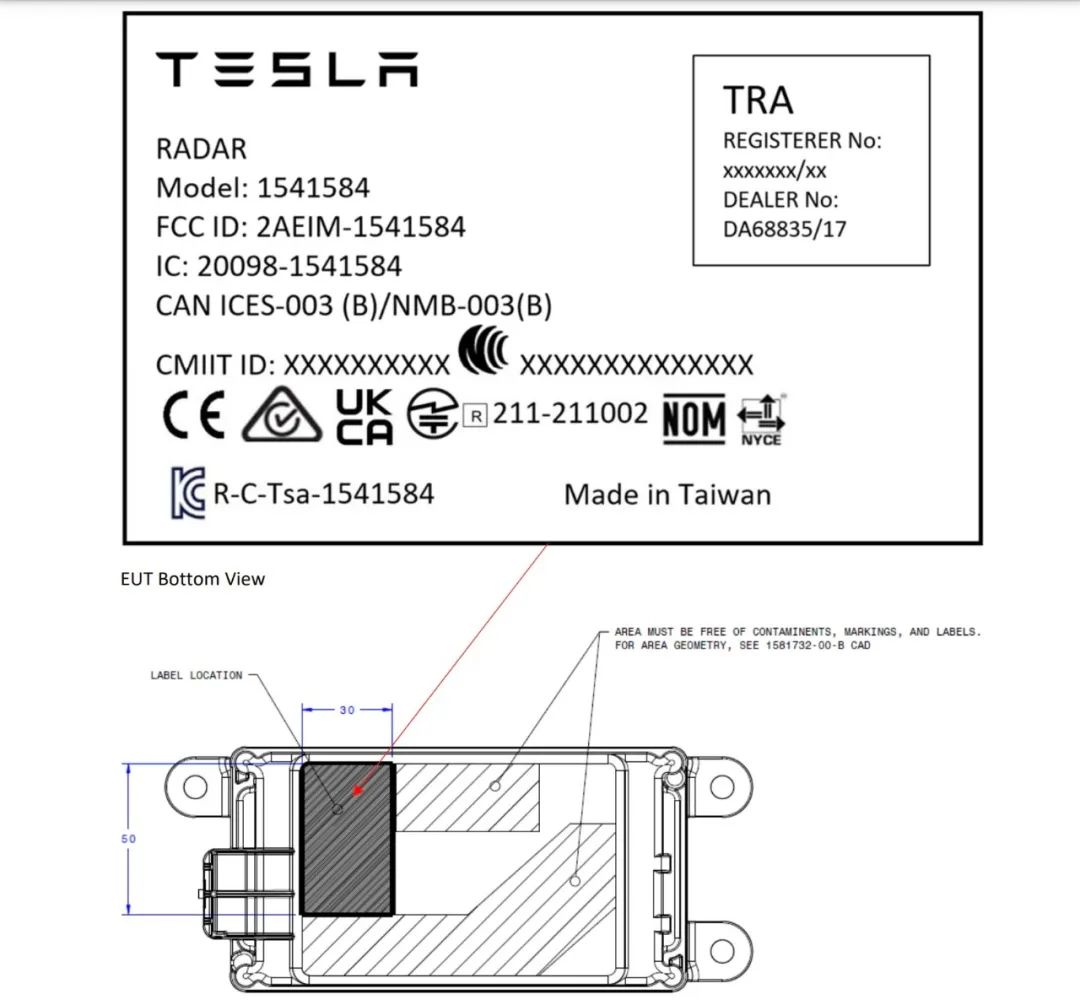
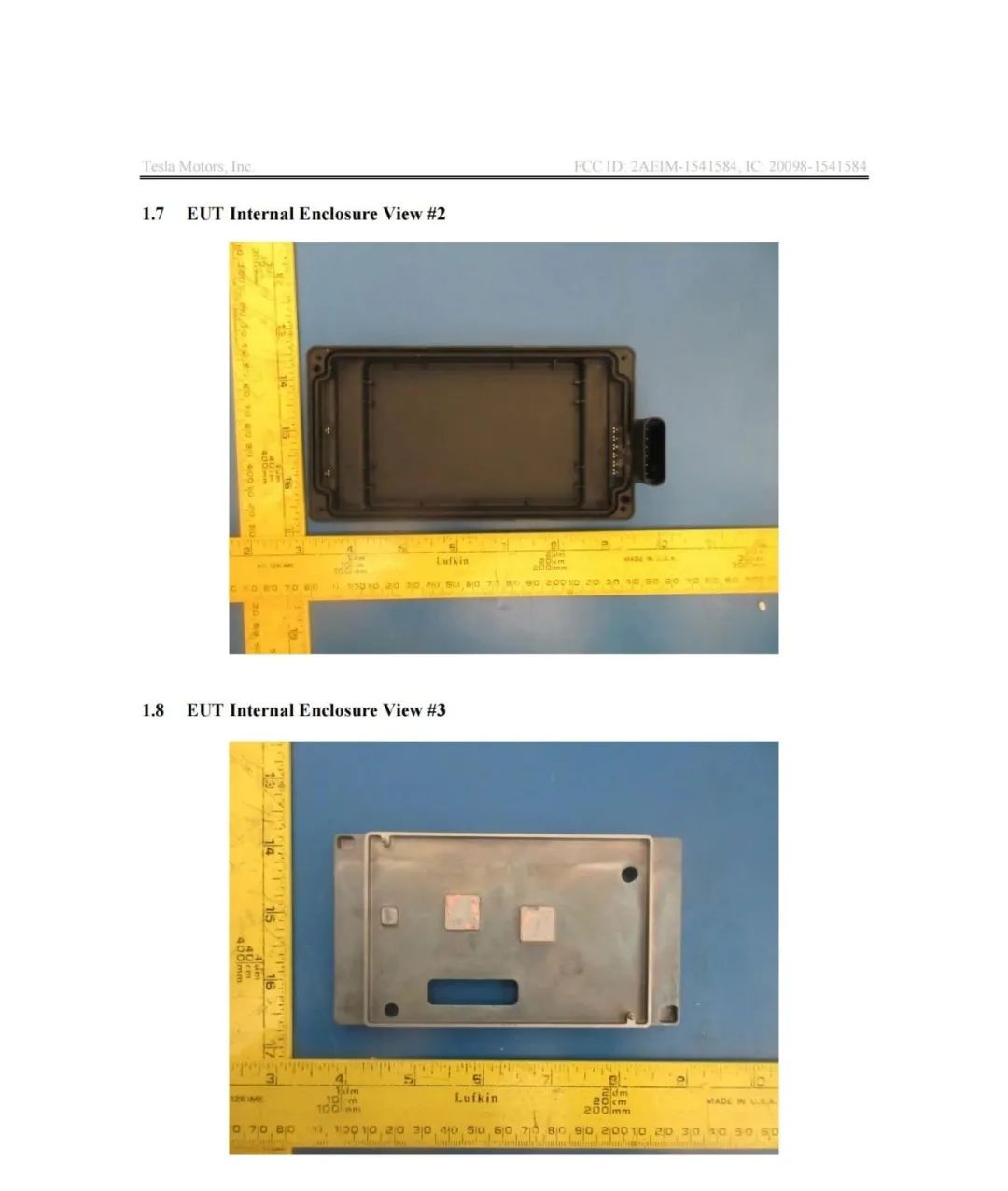
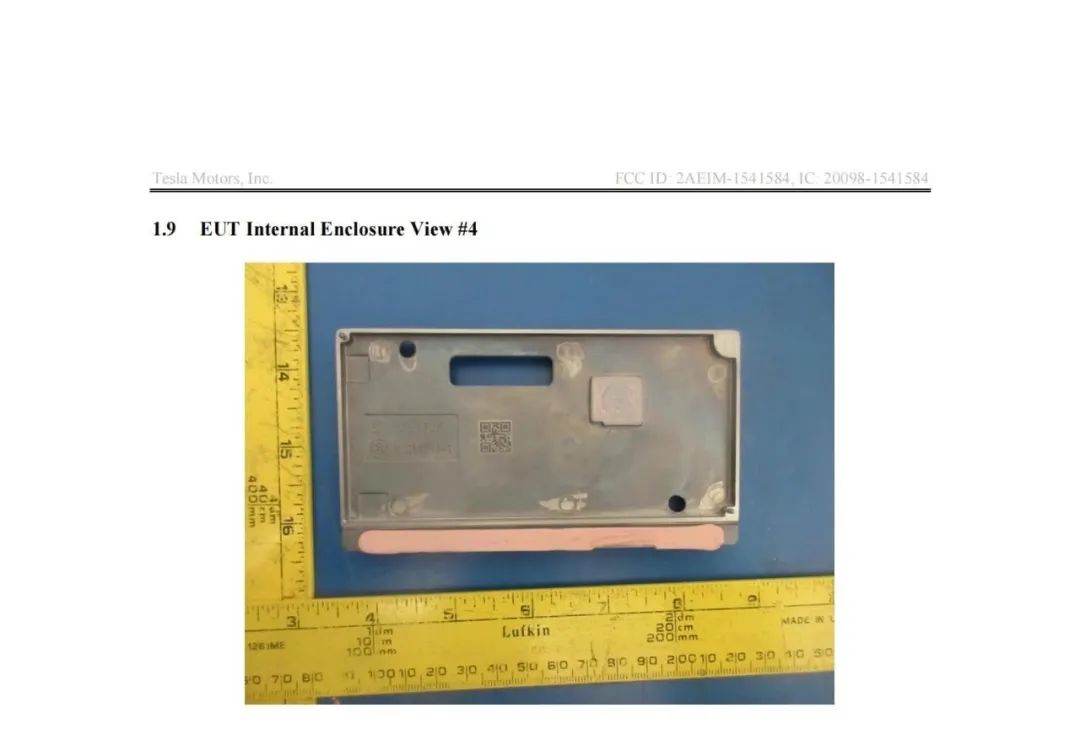
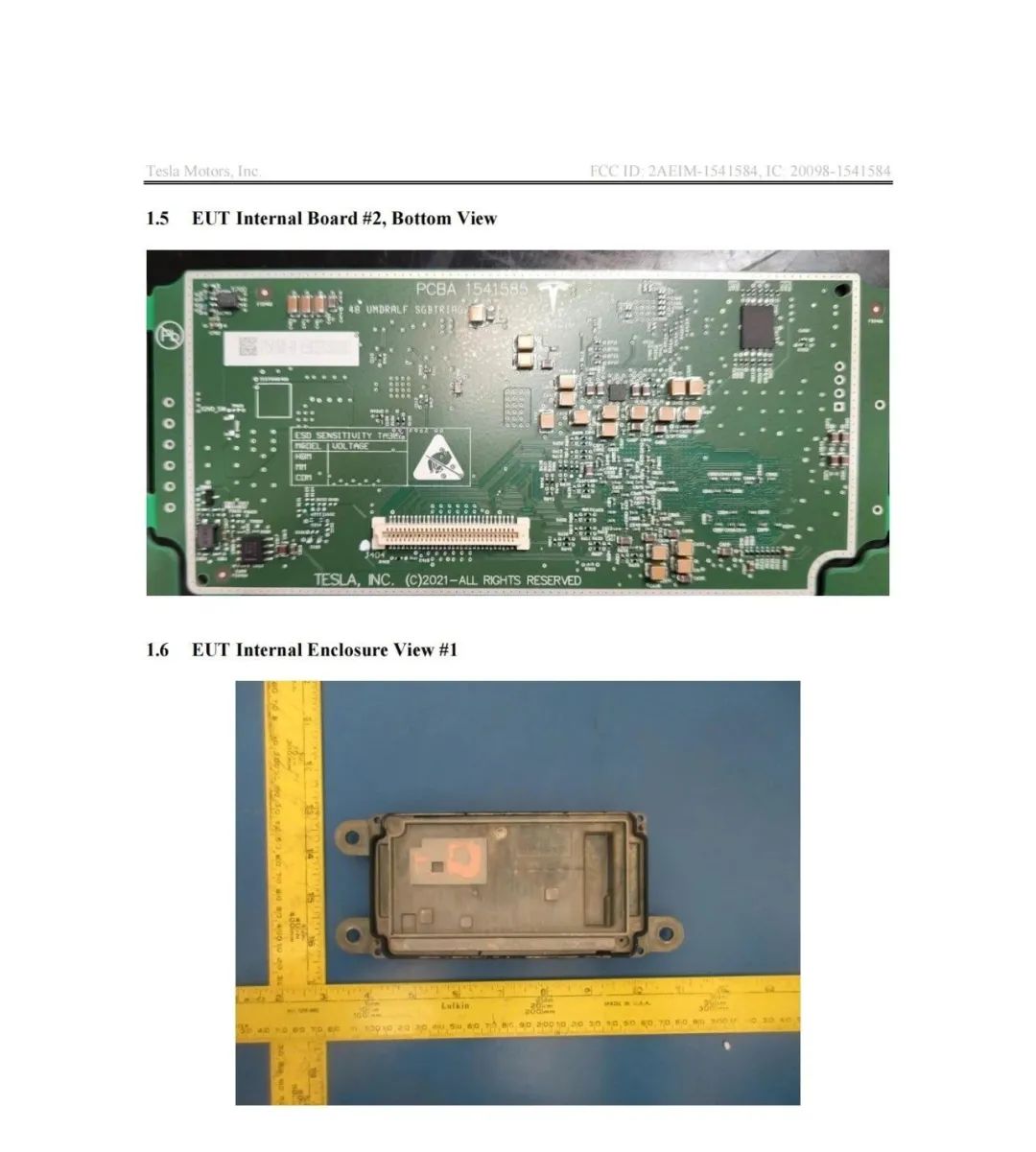
从近期一系列的信息发布显示,特斯拉极有可能将在第四代智能驾驶系统硬件平台上增加高分辨毫米波雷达。而在此之前,该公司已经在FCC(美国联邦通信委员会)进行了产品的申报。
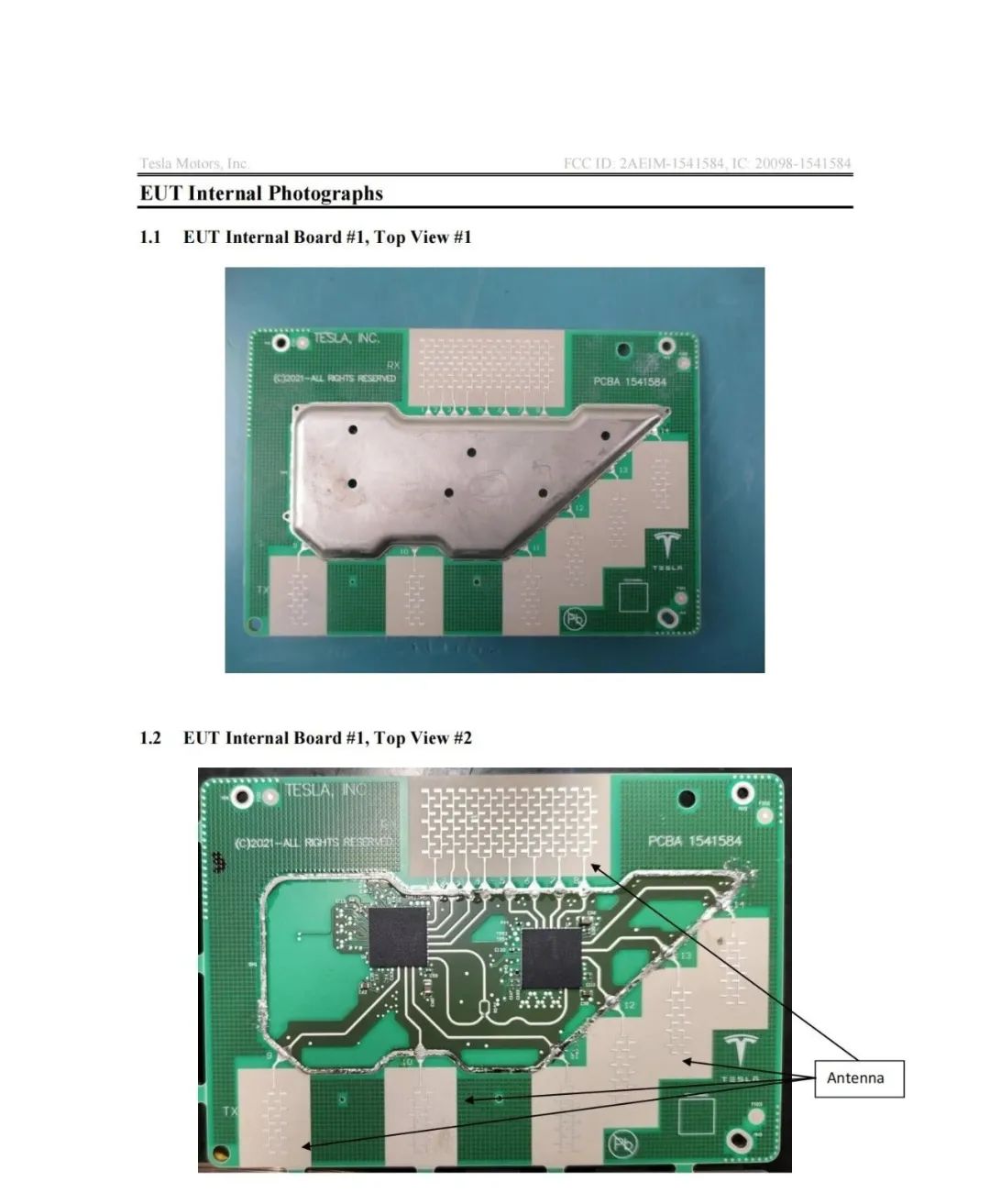
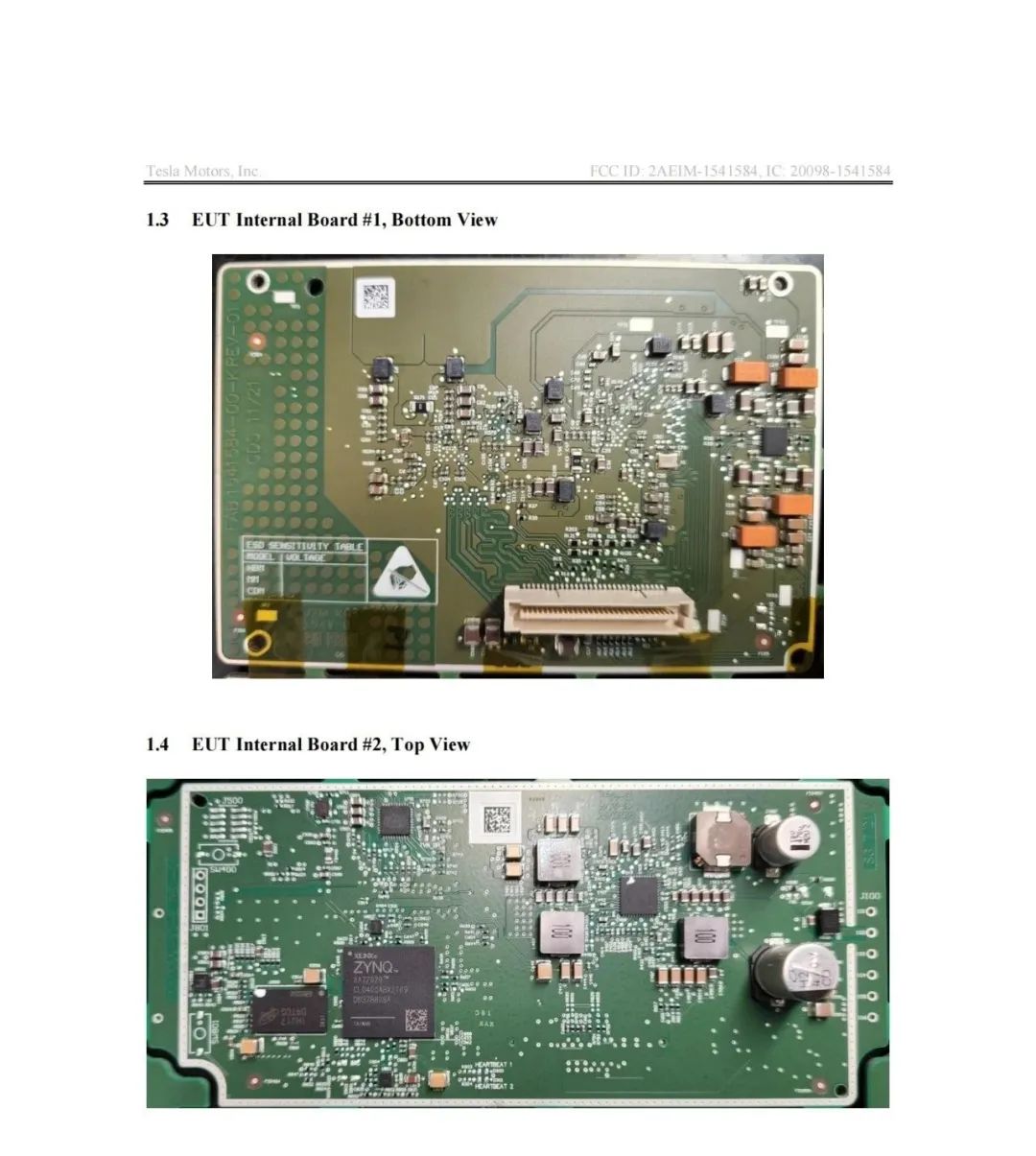
高工智能汽车研究院也在第一时间获取到了这颗特斯拉自研高分辨率雷达的内部设计图,采用双芯片级联雷达解决方案+赛灵思Zynq MPSoC处理平台(FPGA)。
考虑到特斯拉一直走的是极致性价比的技术方案路线,此次加入4D高分辨率雷达的上车阵营,也意味着将掀起一轮新的智驾感知方案升级浪潮。
在为升科(CubTEK)CTO蔡青翰看来,4D成像雷达不仅能够计算出被测目标的距离、速度、水平角、俯仰角等信息,还可以捕捉目标的空间坐标和速度等信息,并且成本相对激光雷达更占优势,未来将瓜分激光雷达的部分市场份额。
“多传感器融合需要匹配足够优化的融合算法。在这其中,4D成像雷达可以实现多传感器的前融合和点云融合,从而降低漏检率、误报率等。”蔡青翰表示,比如先进的大规模MIMO算法、基于人工智能的目标分类算法、高性能抗干扰算法以及超分辨率、鲁棒性的寻角算法。
去年,搭载2个采埃孚的Premium 4D成像雷达(前后配置)、4个来自海拉的增强版远距离点云角雷达的飞凡R7,率先在中国市场落地。
按照NXP的测算,从L2+到要求最高的L5,每辆车可能需要超过10个成像雷达传感器。以L2+为例,4-6个成像雷达,可以实现360度环绕感知,从而替代传统角雷达无法满足AVP的需求。
同样在今年初,Mobileye正式宣布,与Wistron NeWeb Corp.(WNC,啓碁科技)合作生产其软件定义的成像雷达,双方预计将于两年内实现量产。后者主业为无线通讯产品的设计、研发、制造与封测,同时也有自己的车载毫米波雷达产品线。

同时,基于自研SoC+雷达数据算法,这款产品可以提供超过400米范围的4D图像、140度的中距视场和170度的近距视场。同时,AI技术(通过深度学习的训练)的加持,也在从视觉延伸至4D雷达。通过点云的优化处理,消除返回噪声,也包括从物体轮廓中识别目标和分类。
在Mobileye雷达副总裁兼总经理Yaniv Avital看来,“通过提供丰富可靠的数据输出,升级雷达4D感知功能,并减少对多个激光雷达传感器的需求,是大势所趋。“
按照Mobileye此前给出的设计方案,高性价比的L4级自动驾驶系统基于360度环绕的摄像头、4D成像雷达,只需要一个高分辨率的前置FMCW激光雷达,就可以实现纯视觉感知,4D成像雷达+激光雷达两套并行的冗余感知组合。
而在前装量产方面,供应商已经开始发力。
比如,楚航科技的4D成像雷达产品在2022年12月成功完成了国内某知名新能源车企的量产交付,预计在2023年的交付量将会上一个台阶。在性能方面,探测距离高达300m,角度探测方面,精度提升至0.1(水平)*0.2(垂直),该产品已经实现复杂场景的多目标跟踪,匹配高阶智驾场景。
目前,该公司的前向雷达与角雷达相继获得了来自哪吒汽车、东风、海马、奇瑞、长城、零跑汽车等车企的定点并实现了部分定点项目的量产交付。
在产能保障部分,该公司除了在安庆自建拥有年产能180万只的雷达生产基地,上海安亭的智慧工厂未来还将新建8-12条雷达产线,年产能可达500万只,预计将在今年投产。
按照前装定点监测数据显示,到目前为止,中国市场包括上汽、比亚迪、理想、吉利、红旗、长安等多个品牌已经定点或上车4D成像毫米波雷达。
从目前的方案配置以及成本来看,4D成像雷达将成为纯视觉与激光雷达高阶配置中间的高性价比可选方案之一。同时,对于大部分Tier1来说,相关的算法可以快速参考视觉的机器学习技术。
目前,市场上对于4D成像雷达的应用,主要是两个方向,其一是替代传统低分辨率前向雷达,满足高阶智能驾驶多感知融合性能的提升。这意味着,激光雷达可以作为高配或选装,而4D可以作为标配。
第二个主力应用场景,就是行泊一体4D环绕高分辨率(分为点云增强和成像)雷达,性能会略低于前向雷达,补缺超声波雷达性能,提升在低速场景下(尤其是地下停车场)的行人预警和AEB性能。
相关文章:
特斯拉4D雷达方案首次曝光!高阶智驾市场比拼安全冗余
随着L2级智能驾驶进入普及阶段,L3/L4级赛道正在成为各家车企的下一个竞争焦点。背后的最大难题,就是如何在成本可控的前提下,保证足够的安全。 高工智能汽车研究院监测数据显示,2022年度中国市场(不含进出口ÿ…...

Echarts 每个柱子一种渐变色的象形柱状图
第023个点击查看专栏目录本示例是解决每个柱状图的每一个柱子都呈现一种渐变色,每个柱子的颜色都不同。这里同时采用了象形的柱状图效果。 文章目录示例效果示例源代码(共125行)相关资料参考专栏介绍示例效果 示例源代码(共125行&…...

叠氮试剂79598-53-1,6-Azidohexanoic Acid,6-叠氮基己酸,末端羧酸可与伯胺基反应
●中文名:6-叠氮基己酸●英文名:6-Azidohexanoic Acid,6-Azidohexanoic COOH●外观以及性质:西安凯新生物科技有限公司供应的6-Azidohexanoic Acid浅黄色或者无色油状,叠氮化物可使用铜催化的Click化学与末端炔烃共轭&…...
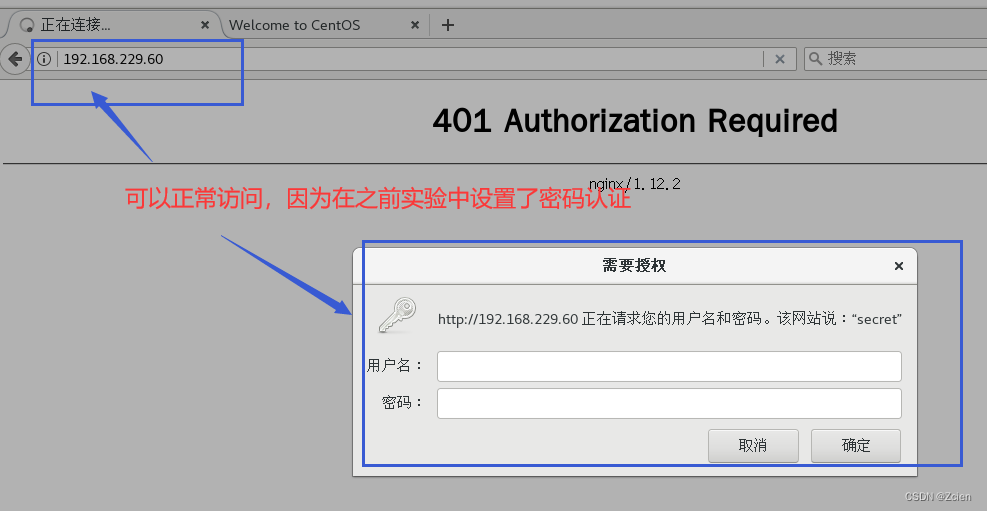
Nginx网站服务——编译安装、基于授权和客户端访问控制
文章目录一、Nginx概述1.1、Nginx的特点1.2、Nginx编译安装1.3、Nginx运行控制1.4、Nginx和Apache的区别二、编译安装Nginx服务的操作步骤2.1、关闭防火墙,将安装nginx所需软件包传到/opt目录下2.2、安装依赖包2.3、创建运行用户、组(Nginx 服务程序默认…...

Spring Boot 版本升级2.2.11.RELEASE至2.7.4
2.2.11.RELEASE > 2.7.4项目更新spring-boot-starter-parent 主依赖,导致项目跑不起了日志也没有输出有用信息,自己查看源码调试启动入口打断点,一步步进入方法定位项目停止代码我的项目执行到SpringApplication.class 的152行代码会停止项…...
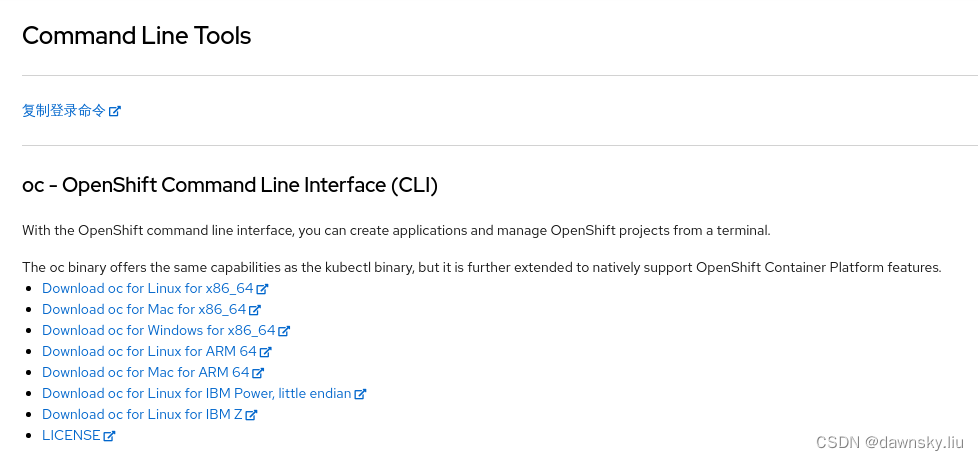
OpenShift 4 - 使用辅助安装器安装单节点 OpenShift
文章目录单节点 OpenShift 和 OpenShift 辅助安装器单节点 OpenShiftOpenShift 辅助安装器使用辅助安装器安装单节点 OpenShift本文使用的安装环境准备环境在宿主机上安装 KVM 环境创建 SSH 证书根据集群配置,用辅助安装器生成 Discovery ISO用 Discovery ISO 启动 …...
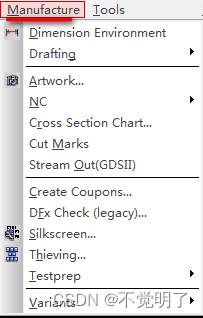
Allegro如何快速锁定整板测试点操作指导
Allegro如何快速锁定整板测试点操作指导 在做PCB设计的时候,会需要给整板添加测试点,用于飞针测试,如下图 在测试点添加好之后,文件输出之前需要把测试点全部锁定,避免因为测试点模具开好,测试点被移动的情况出现 如果逐个锁定Via,容易遗漏 Allegro支持快速锁定整板测…...

系统分析师---知识产权标准化思维导图
保护范围以及对象(3星) 著作权法:不用申请,作品完整即保护绘画摄影作品,原件持有人只是所有权与展览权,著作权归原作者 专利法:专利权需要申请商标法:商标权需要申请反不正当竞争法…...
HiEV洞察 | 特斯拉HW4.0再爆猛料,高精定位、雷达均有变动
作者 | 查理斯 编辑 | 王博特斯拉 HW4.0 消息传出后,有人爆料说在硬件层面发生了巨大变化,引发行业轰动。大家都在猜测HW4.0 具体做了哪些改动。 2月16日,Twitter用户greentheonly爆出HW4.0的主板拆解照片。2月18日又爆出毫米波雷达的拆解照片…...

潜伏的 Linux Rootkit:Syslogk
Rootkit 是非常危险的恶意软件,一旦侵入就很难被发现。开发 Rootkit 通常更加困难,很多攻击者都倾向于重用开源项目。 Adore-Ng 是一个相对较老的、开源的 Linux 内核 Rootkit,最初针对内核 2.x 版本开发,但目前已更新为针对内核…...
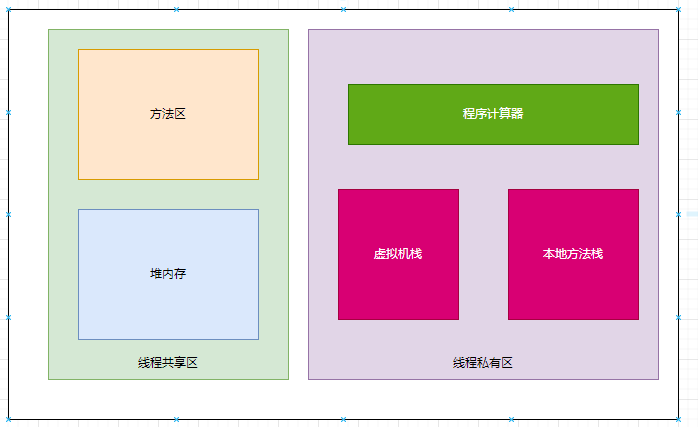
JVM总结
1. 内存结构 线程私有区 程序计算器 作用:是一块较小的内存空间,存储的是当前线程所执行的字节码文件的序号特点:线程私有,不会出现内存空间溢出 虚拟机栈 虚拟机栈是管理JAVA方法执行的内存模型,每个方法执行时都…...
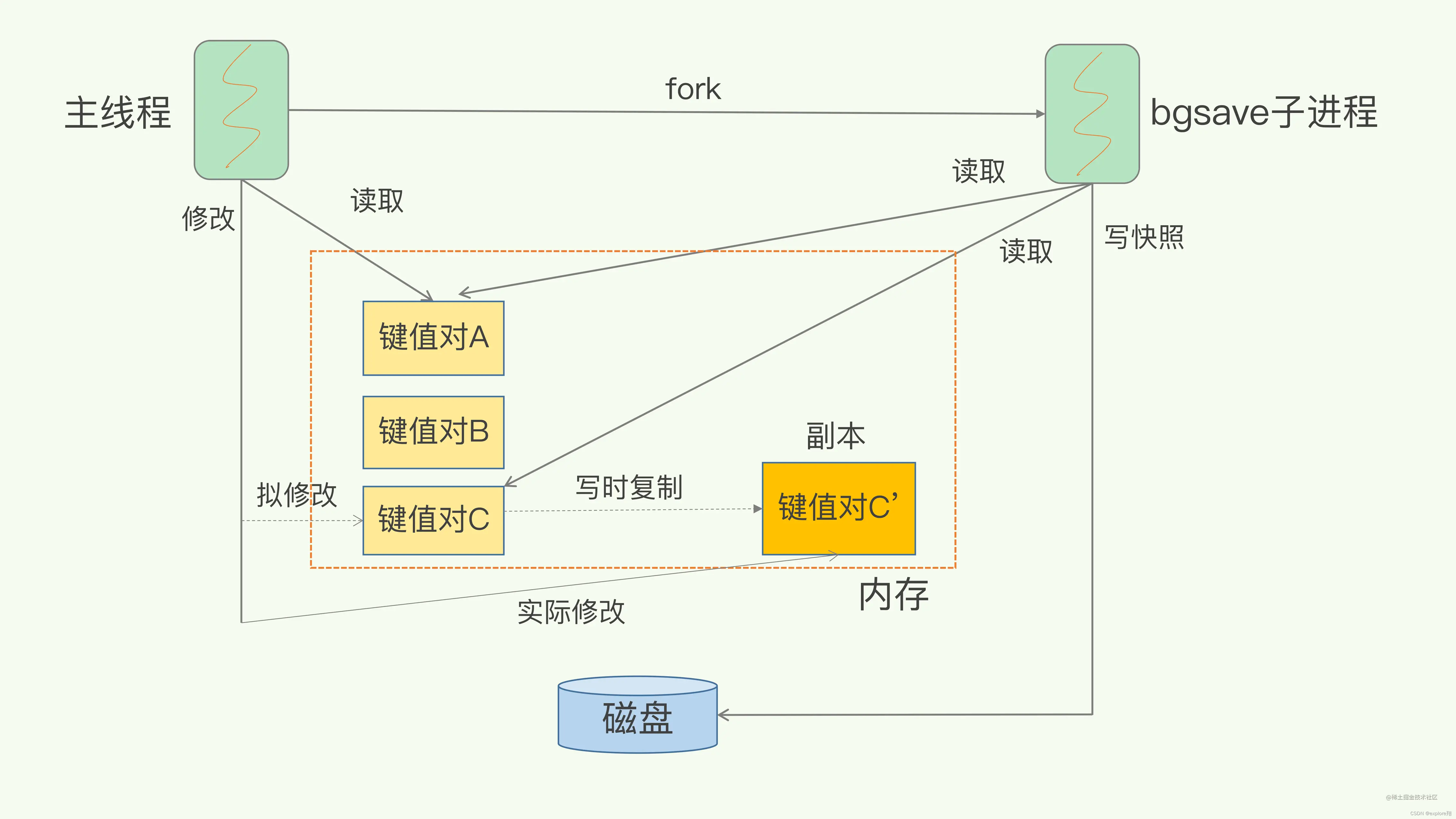
AOF:redis宕机,如何避免数据丢失
由于redis是基于内存的数据库,一旦宕机,数据就会丢失?如何解决? 目前,Redis 的持久化主要有两大机制,即 AOF(Append Only File)日志和 RDB(Redis DataBase) 快照。 AO…...
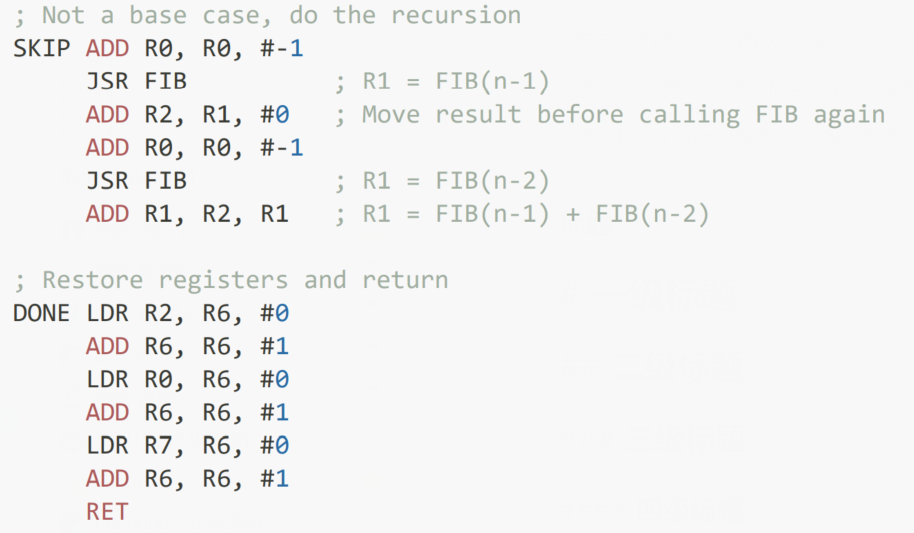
LC-3—MIO、MMIO、Caller Save、Callee Save
LC-3—MMIO、Caller Save、Callee SaveMMIOCaller Save、Callee Save举个例子MMIO MMIO(Memory Mapped I/O)是一种在系统内存中映射I/O端口的技术,它允许设备直接访问内存中的特定地址,从而实现I/O操作。MMIO技术可以提高I/O操作…...

SQL注入报错注入之floor()报错注入原理分析
简介 对于SQL注入的报错注入通常有三个函数需要我们掌握: extractValue(xml_frag, xpath_expr)updateXML(xml_target, xpath_expr,new_xml)floor() 对于extractValue和updateXML函数来说比较好理解,就不做解释了,这里只对floor函数的报错注…...

2023CS双非保研985经验分享(南大、华科、中科大科学岛、国防科大、西交、中南、深圳大学、北邮、中科院等)
前言: 2022保研以来,因为自己的双非背景,要与985、211的排名靠前的计科大佬竞争,不自信、焦虑无时无刻的包围着我;所幸,一路以受到了许多学长、学姐耐心的帮助,也有很多保研的同学一路互相支撑。…...

Shell中的IFS
IFS是shell的内置变量,IFS是一个字符串,里面的每一个字符都会用来作为分隔符进行单词分割。 IFS变量只在当前shell起作用。 一、对$*的影响 先做参数替换把$*替换成参数列表。相当于args[] 然后下面分两种情况: (1)…...

Java学习线路图--书籍推荐
----基础---- 《Java从入门到精通》 ----进阶---- 一 《Java项目开发全程实录》《Java开发实例大全(基础篇)》《Java开发实例大全(提高篇)》 二 《Java Web从入门到精通》《Java Web项目开发全程实录》《Java Web开发实例大…...
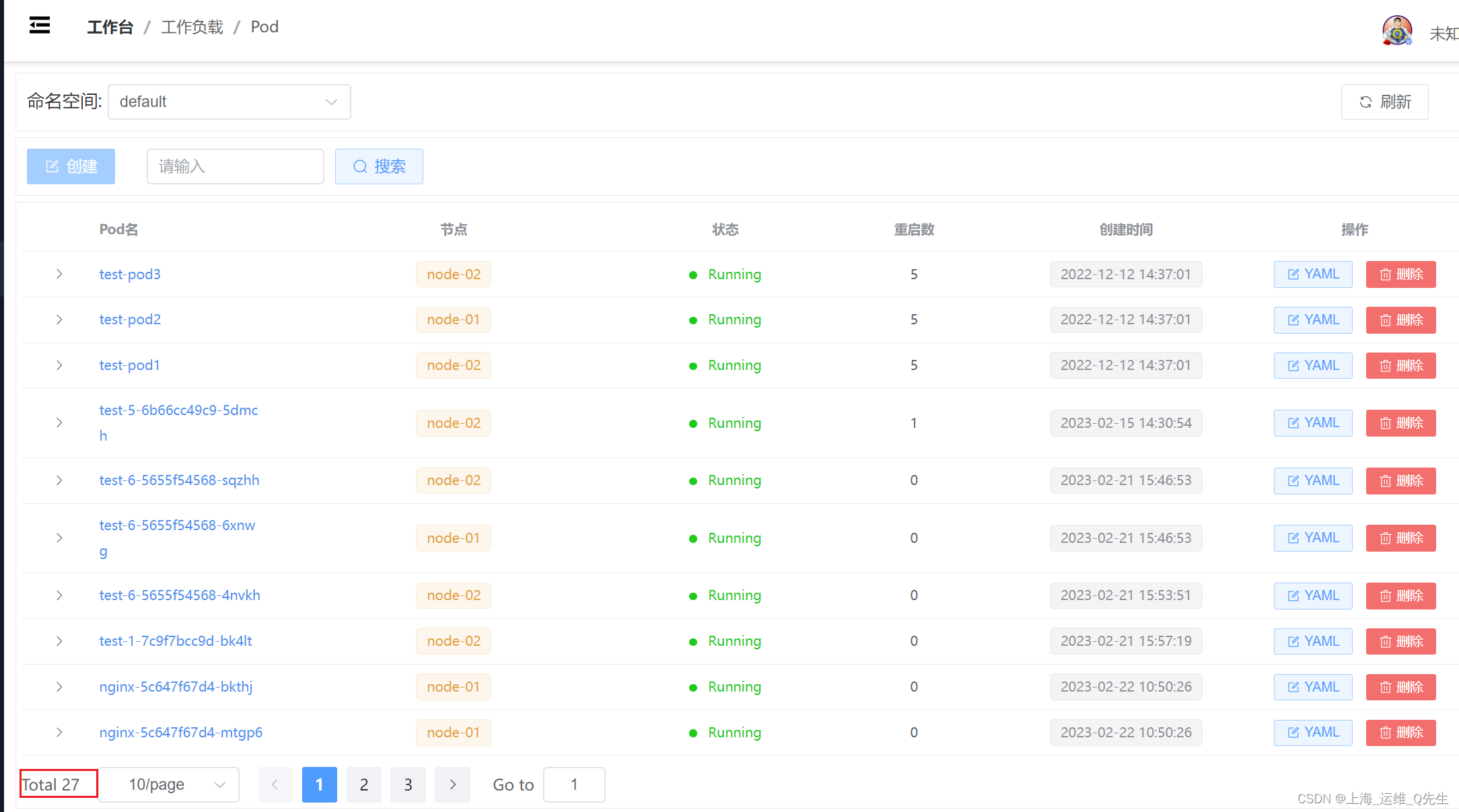
【GO】k8s 管理系统项目23[前端部分–工作负载-Pod]
k8s 管理系统项目[前端部分–工作负载-Deployment] 1. 代码部分 1.1 准备工作 由于Pod页面和Deployment内容差不多.那么就直接把Deployment的内容复制过来.再做修改. 替换Deployment为Pod替换Deploy为Pod替换deployment为pod替换deploy为pod禁用新增的按钮,删除新增方法,表…...

rabbitmq在linux系统下安装步骤
第一步:登录官网 官网地址:www.rabbitmq.com,点击Get Started 重要信息:RabbitMQ Tutorials手册,描述了工作模式 第二步:点击Download Installation下载 重要信息:rabbitmq是用erlang语言开发的࿰…...
阿里测试员晒薪资条,看完真的扎心了...
前几天,有位老粉私信我,说看到某95后学弟晒出阿里的工资单,他是真酸了…想狠补下技术,努力冲一把大厂。 为了帮到他,也为了大家能在最短的时间内做面试复习,我把软件测试面试系列都汇总在这一篇文章了。 …...

基于Vue 3与Express的私有化ChatGPT Web客户端部署指南
1. 项目概述与核心价值最近在折腾一个自用的AI对话工具,核心需求很简单:想在一个自己完全掌控的界面上,方便地使用大语言模型,比如ChatGPT的API。市面上虽然有很多现成的网页应用,但要么功能太臃肿,要么部署…...

别再只点保存了!QGIS工程文件.QGZ和.QGS到底怎么选?附XML结构详解
QGIS工程文件格式深度解析:.QGZ与.QGS的选择策略与XML实战指南 当你在QGIS中完成一幅精心设计的地图,点击保存按钮时,系统弹出的格式选择对话框可能让你陷入短暂的犹豫——该选择.QGZ还是.QGS?这个看似简单的选择背后,…...
:比特的手术刀,镜像翻转与空间缝合)
【运算篇】算术与逻辑律令(3):比特的手术刀,镜像翻转与空间缝合
在 4-bit 的逻辑地牢里,如果说算术指令提供了“肌肉”,逻辑指令开启了“感官”,那么接下来我们要聊的,则是这台机器最细腻的形态手术。如果说 AND/OR 是在判定“存在”,那么 NOT 和移位指令(SHL/SHR&#x…...
自动发布神器)
Wechatsync(文章同步助手)自动发布神器
下载地址:https://www.chajianxw.com/product-tool/16773.html 安装教程:https://www.chajianxw.com/tutorial/how-to-install-chrome-plugin.html AI-Skills 技能包一键调用:https://ai-skills.ai/?inviteCode=S2JV3NCK 目录 一、引言 二、系统整体架构设计 核心技术栈…...

JSON数据同步利器:深度解析ogre-software/json-synchronizer的核心原理与应用
1. 项目概述:一个被低估的JSON数据同步利器如果你经常和JSON数据打交道,尤其是在前后端分离、微服务架构或者多数据源集成的场景下,你肯定遇到过这样的烦恼:手头有两份甚至多份JSON数据,它们结构相似,但内容…...

别再死记硬背了!Vivado伪双口RAM的wea/ena信号,这次用仿真波形给你讲透
深入解析Vivado伪双口RAM控制信号:从波形图看wea/ena关键设计 在FPGA开发中,存储器设计一直是性能优化的关键环节。Xilinx Vivado工具链提供的伪双口RAM IP核因其灵活性和高效性,成为许多高速数据处理系统的首选方案。然而,不少开…...

群晖相册AI识别解锁指南:让无GPU设备也能享受智能相册功能
群晖相册AI识别解锁指南:让无GPU设备也能享受智能相册功能 【免费下载链接】Synology_Photos_Face_Patch Synology Photos Facial Recognition Patch 项目地址: https://gitcode.com/gh_mirrors/sy/Synology_Photos_Face_Patch 你是否拥有DS918或DS3615xs等群…...

深度解析:3种高效的Windows依赖检测完整方案
深度解析:3种高效的Windows依赖检测完整方案 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist VisualCppRedist AIO项目是一个专业的Microsoft Visual …...

【限时解密】Midjourney Anthotype印相黄金比例:1:1.618构图×植物色素衰减曲线=不可复制的复古质感
更多请点击: https://intelliparadigm.com 第一章:Midjourney Anthotype印相的本质溯源与时代语境 Anthotype(植物感光印相)是一种源于19世纪的古老摄影工艺,利用植物提取物(如甜菜根、黑醋栗或蒲公英花汁…...

射频衰减系统设计:PIN二极管与电流源DAC应用
1. 射频衰减系统设计基础在无线通信系统中,精确控制信号强度是确保系统性能的关键要素。射频衰减器作为信号链中的"音量旋钮",其性能直接影响接收机动态范围、发射机功率控制精度等核心指标。传统机械式衰减器虽然精度高,但体积大、…...