rviz是如何获取图像里选择的点云的3D坐标的
以前以为rviz是用OpenGL渲染绘图,那么获取图像里像素点对应的真实3D坐标是采用的OpenGL里提供的API实现的,结果一看代码还真不是这样,rviz也就渲染用了OpenGL,其他都是自己实现的,图像界面的实现完全是遵循MVC设计模式自己实现的透视投影和坐标转换等所有相关类。获取点云图像里所选择的点云点的3D坐标相关的代码是这里:
src/rviz/selection/selection_manager.cpp:bool SelectionManager::getPatchDepthImage(Ogre::Viewport* viewport,int x,int y,unsigned width,unsigned height,std::vector<float>& depth_vector)
{unsigned int num_pixels = width * height;depth_vector.reserve(num_pixels);setDepthTextureSize(width, height);M_CollisionObjectToSelectionHandler::iterator handler_it = objects_.begin();M_CollisionObjectToSelectionHandler::iterator handler_end = objects_.end();for (; handler_it != handler_end; ++handler_it){handler_it->second->preRenderPass(0);}if (render(viewport, depth_render_texture_, x, y, x + width, y + height, depth_pixel_box_, "Depth",depth_texture_width_, depth_texture_height_)){uint8_t* data_ptr = (uint8_t*)depth_pixel_box_.data;for (uint32_t pixel = 0; pixel < num_pixels; ++pixel){uint8_t a = data_ptr[4 * pixel];uint8_t b = data_ptr[4 * pixel + 1];uint8_t c = data_ptr[4 * pixel + 2];int int_depth = (c << 16) | (b << 8) | a;float normalized_depth = ((float)int_depth) / (float)0xffffff;depth_vector.push_back(normalized_depth * camera_->getFarClipDistance());}}else{ROS_WARN("Failed to render depth patch\n");return false;}handler_it = objects_.begin();handler_end = objects_.end();for (; handler_it != handler_end; ++handler_it){handler_it->second->postRenderPass(0);}return true;
}bool SelectionManager::get3DPatch(Ogre::Viewport* viewport,int x,int y,unsigned width,unsigned height,bool skip_missing,std::vector<Ogre::Vector3>& result_points)
{boost::recursive_mutex::scoped_lock lock(global_mutex_);ROS_DEBUG("SelectionManager.get3DPatch()");std::vector<float> depth_vector;if (!getPatchDepthImage(viewport, x, y, width, height, depth_vector))return false;unsigned int pixel_counter = 0;Ogre::Matrix4 projection = camera_->getProjectionMatrix();float depth;for (unsigned y_iter = 0; y_iter < height; ++y_iter)for (unsigned x_iter = 0; x_iter < width; ++x_iter){depth = depth_vector[pixel_counter];// Deal with missing or invalid pointsif ((depth > camera_->getFarClipDistance()) || (depth == 0)){++pixel_counter;if (!skip_missing){result_points.push_back(Ogre::Vector3(NAN, NAN, NAN));}continue;}Ogre::Vector3 result_point;// We want to shoot rays through the center of pixels, not the corners,// so add .5 pixels to the x and y coordinate to get to the center// instead of the top left of the pixel.Ogre::Real screenx = float(x_iter + .5) / float(width);Ogre::Real screeny = float(y_iter + .5) / float(height);if (projection[3][3] == 0.0) // If this is a perspective projection{// get world-space ray from camera & mouse coordOgre::Ray vp_ray = camera_->getCameraToViewportRay(screenx, screeny);// transform ray direction back into camera coordsOgre::Vector3 dir_cam = camera_->getDerivedOrientation().Inverse() * vp_ray.getDirection();// normalize, so dir_cam.z == -depthdir_cam = dir_cam / dir_cam.z * depth * -1;// compute 3d point from camera origin and direction*/result_point = camera_->getDerivedPosition() + camera_->getDerivedOrientation() * dir_cam;}else // else this must be an orthographic projection.{// For orthographic projection, getCameraToViewportRay() does// the right thing for us, and the above math does not work.Ogre::Ray ray;camera_->getCameraToViewportRay(screenx, screeny, &ray);result_point = ray.getPoint(depth);}result_points.push_back(result_point);++pixel_counter;}return !result_points.empty();
}bool SelectionManager::get3DPoint(Ogre::Viewport* viewport, int x, int y, Ogre::Vector3& result_point)
{ROS_DEBUG("SelectionManager.get3DPoint()");std::vector<Ogre::Vector3> result_points_temp;bool success = get3DPatch(viewport, x, y, 1, 1, true, result_points_temp);if (result_points_temp.empty()){// return result_point unmodified if get point fails.return false;}result_point = result_points_temp[0];return success;
}
世界3D坐标是用的射线法计算出来。SelectionManager::get3DPoint()被rviz里多个地方调用,凡是UI界面上需要查看点的坐标地方都是调用它。
相关文章:

rviz是如何获取图像里选择的点云的3D坐标的
以前以为rviz是用OpenGL渲染绘图,那么获取图像里像素点对应的真实3D坐标是采用的OpenGL里提供的API实现的,结果一看代码还真不是这样,rviz也就渲染用了OpenGL,其他都是自己实现的,图像界面的实现完全是遵循MVC设计模式…...

响应体和状态码
后端响应体和状态码设计 主流技术:响应体 和 状态码结合使用 响应体:数据 响应 给前端的 格式 1、为什么要设计统一响应体? 1、系统默认提供许多的状态码,但HTTP的状态码数量有限。 通过修改响应返回的JSON数据,更好的表达业务中…...
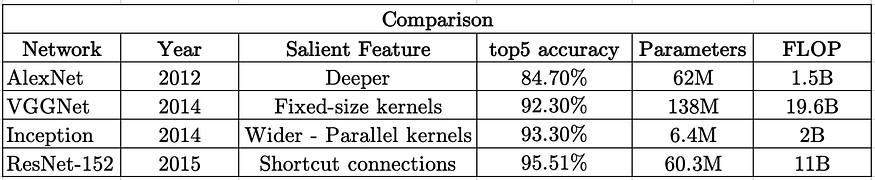
CNN进展:AlexNet、VGGNet、ResNet 和 Inception
一、说明 对于初学者来说,神经网络进展的历程有无概念?该文综合叙述了深度神经网络的革命性突破,从AlexNet开始,然后深度VGG的改进,然后是残差网络ResNet和 Inception,如果能讲出各种特色改进点的和改进理由…...

数据的存储--MongoDB文档存储
MongoDB文档存储 NoSQL,全称为Not Only SQL,意为不仅仅是SQL,泛指非关系型数据库。NoSQL是基于键值对的,而且不需要经过SQL层的解析,数据之间没有耦合性,性能非常高。 非关系行数据库又可细分如下。 键值存…...

Notepad++ 通过HexEditor插件查看.hprof文件、heap dump文件的堆转储数据
文章目录 需求场景插件安装查看notepad的版本,看看是32位的还是64位的下载对应的版本解压导入插件打开notepad插件文件夹:Notepad安装目录新建一个HexEditor文件夹选中插件文件导入 重启notepad使用 需求场景 想要查看app内存的某个域的数据。 利用Andr…...
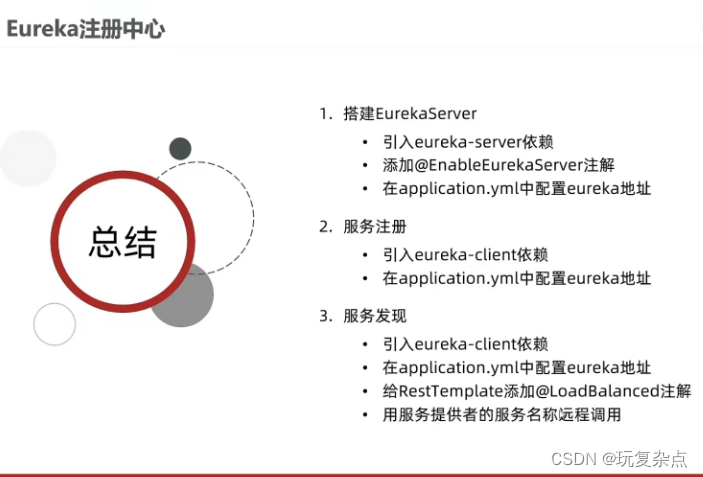
微服务学习 | Eureka注册中心
微服务远程调用 在order-service的OrderApplication中注册RestTemplate 在查询订单信息时,需要同时返回订单用户的信息,但是由于微服务的关系,用户信息需要在用户的微服务中去查询,故需要用到上面的RestTemplate来让订单的这个微…...

spring boot集成quartz
目录 1.定时任务实现 2.quartz说明 3.存储方式 4.示例 5.定时任务的重新定制,恢复,暂停及删除 1.定时任务实现 定时任务的实现方式有很多,如下: 1.启动类中添加EnableScheduling,开启定时任务功能,然…...

[Linux] yum仓库相关
一、yum仓库 1.1 yum简介 yum 是一种基于 RPM 软件包(Red-Hat Package Manager 的缩写)的软件更新机制,可自动解决软件包之间的依赖关系。这就解决了日常工作中花费大量时间寻找安装包的问题。 为什么会出现依赖 linux 本身就有简化系统的优…...
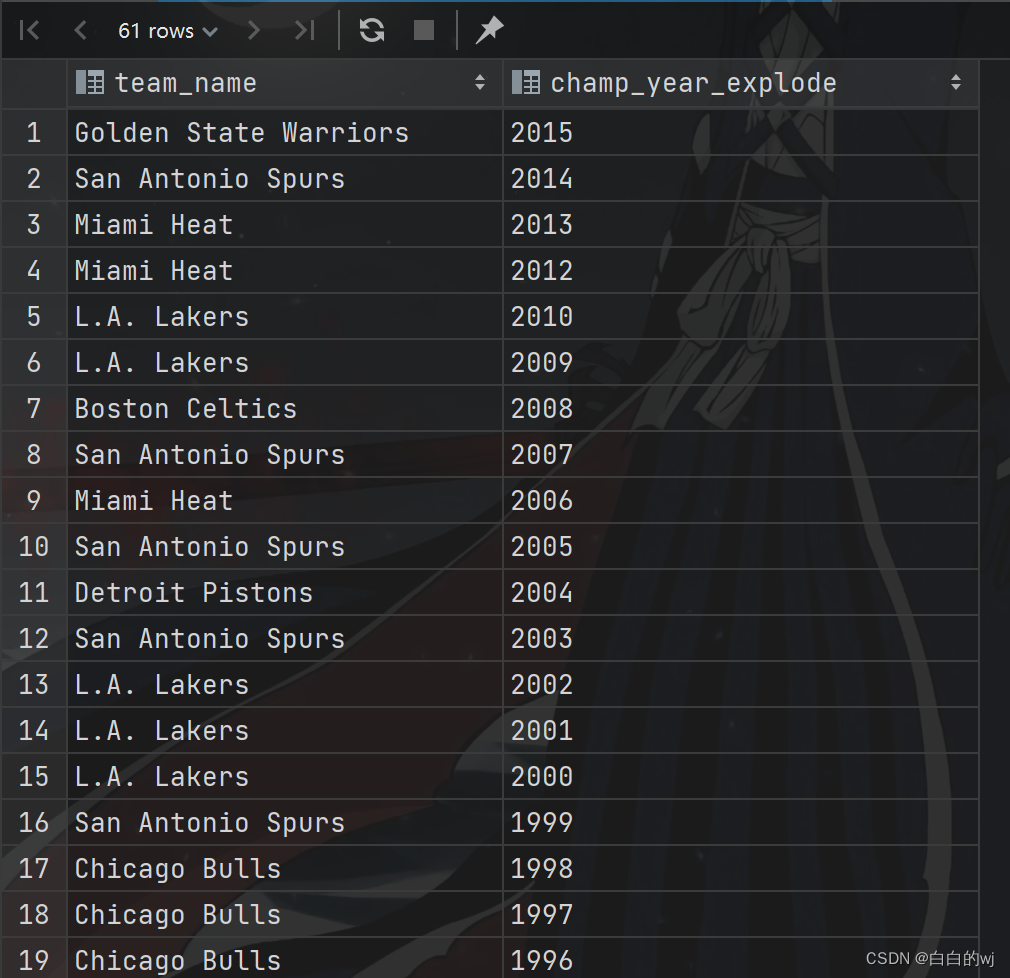
2023.11.15-hivesql之炸裂函数explode练习
把一个容器的多个数据炸裂出单独展示: explode(容器) 需求:将NBA总冠军球队数据使用explode进行拆分,并且根据夺冠年份进行倒序排序。 1.建表 --step1:建表 create table the_nba_championship(team_name string,champion_year array<string> ) row format…...

Linux - 内核 - 安全机制 - 内存页表安全
说明 内核页表安全的最终目标是:将内核使用到的内存页(内核与module占用)的属性(读/写/可执行)配置成安全的,即:代码段和rodata段只读,非代码段不能执行等,用来防御堆栈…...
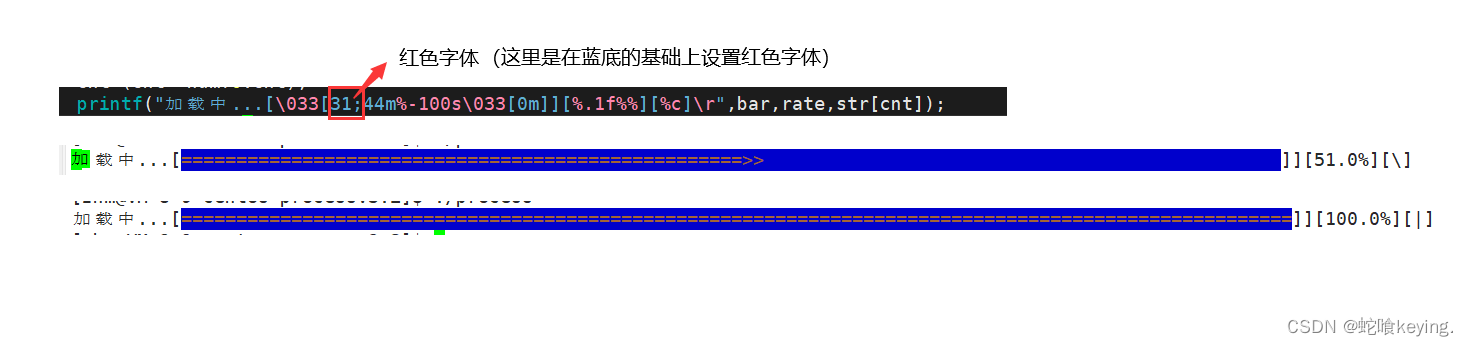
Linux---(七)Makefile写进度条(三个版本)
文章目录 一、前提引入🎗️下面的代码什么现象?🎗️下面的代码什么现象? 二、缓冲区三、回车换行🎗️注意🎗️图解🎗️老式回车键造型(意思是充当两个动作)🎗…...

数据库分页查询
数据库只所以要分页查询,其实是界面显示的需要,不是数据库的需要。 数据库本身查询是很快的。本文章是针对这种情况的。 如果数据库本身查询慢,那是优化查询语句的事情了。不在本文章范围内。 今天遇到了这个问题。 是个老项目。在原有的查询…...

如何选择合适的数据库管理工具?Navicat Or DBeaver
写在前面 在阅读本文之前,糖糖给大家准备了Navicat和DBeaver安装包,在公众号内回复“Navicat”或“DBeaver”或"数据库管理工具"来下载。 引言 对于测试而言,在实际工作中往往会用到数据库,那么选择使用哪种类型的数…...
Opencv!!在树莓派上安装Opencv!
一、更新树莓派系统 sudo apt-get update sudo apt-get upgrade二、安装python-opencv sudo apt-get install libopencv-dev sudo apt-get install python3-opencv三、查看是否安装成功 按以下命令顺序执行: python import cv2 cv2.__version__如果出现版本号&a…...
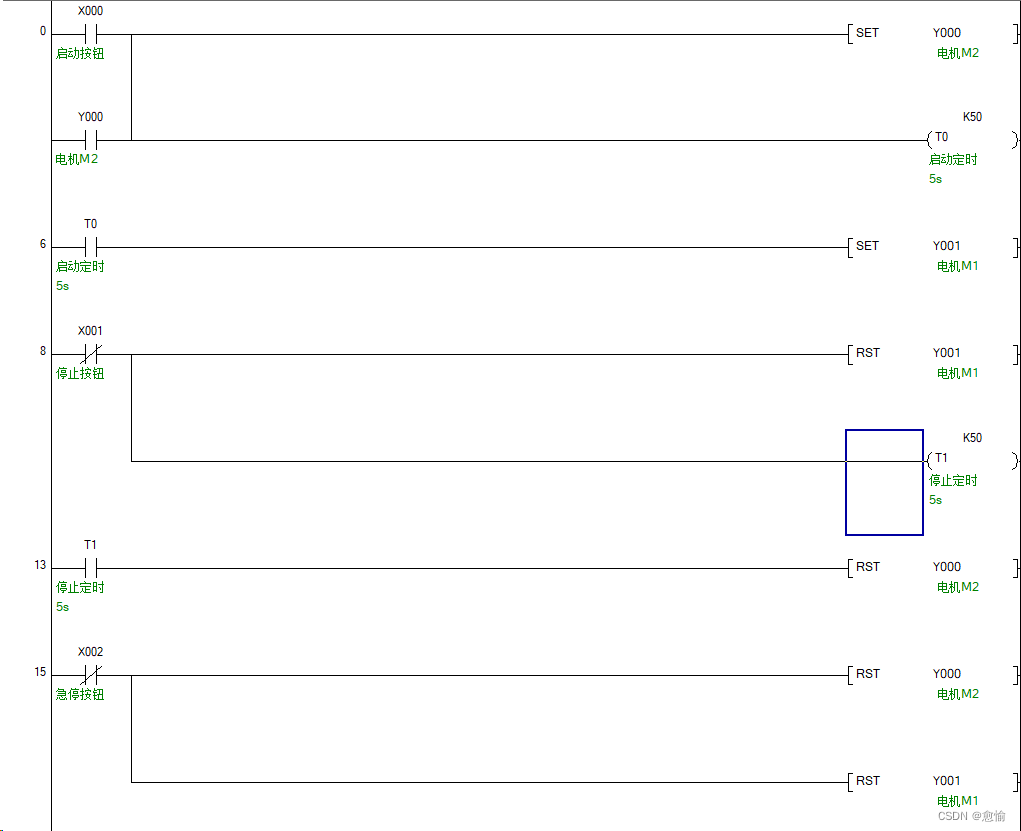
三菱FX3U小项目—传输带定分级控制
目录 一、项目描述 二、IO口分配 三、项目程序 四、总结 一、项目描述 两条运输带顺序相连,为了避免运送的物料在1号运输线上堆积,所以启动时,1号运输带开始运行,5S后2号运输带自动启动。停机时顺序与启动刚好相反,…...

实例解释遇到前端报错时如何排查问题
前端页面报错: 1、页面报错500,首先我们可以知道是服务端的问题,需要去看下服务端的报错信息: 2、首先我们查看下前端是否给后端传了id: 我们可以看到接口是把ID返回了,就需要再看下p_id是什么情况了。 3、我们再次请…...
微电影分销付费短剧小程序开发
微电影系统分销管理付费软件是一款面向微电影制作公司和影视产业的付费软件,它的出现旨在帮助微电影制作公司和影视产业实现分销管理,提高产业的效率和竞争力。本文将介绍微电影系统分销管理付费软件的背景、特点和开发方法。 一、背景 微电影作…...
时间序列预测中的4大类8种异常值检测方法(从根源上提高预测精度)
一、本文介绍 本文给大家带来的是时间序列预测中异常值检测,在我们的数据当中有一些异常值(Outliers)是指在数据集中与其他数据点显著不同的数据点。它们可能是一些极端值,与数据集中的大多数数据呈现明显的差异。异常值可能由于…...
Android---Gradle 构建问题解析
想必做 Android App 开发的对 Gradle 都不太陌生。因为有 Android Studio 的帮助,Android 工程师使用 Gradle 的门槛不算太高,基本的配置都大同小异。只要在 Android Studio 默认生成的 build.gradle 中稍加修改,就都能满足项目要求。但是&am…...

02-2解析JsonPath
一、jsonpath的安装及使用方式 pip安装 pip install jsonpathjsonpath的使用 obj json.load(open(json文件, r, encodingutf‐8)) ret jsonpath.jsonpath(obj, jsonpath语法)可以参考以下这篇博客进行jsonpath的简单入门JSONPath-简单入门...

不止是拆网卡:以联想ThinkCentre M7131z为例,聊聊老旧一体机的升级改造可能性
联想ThinkCentre M7131z改造指南:从拆网卡到全面性能升级 老旧商用一体机往往被贴上"性能瓶颈"的标签,但联想ThinkCentre M7131z系列却隐藏着令人惊喜的改造潜力。这台发布于2015年前后的商用一体机,凭借其模块化设计和充足的内部空…...

Nunchaku FLUX.1-dev实战:手把手教你用ComfyUI生成惊艳AI图片
Nunchaku FLUX.1-dev实战:手把手教你用ComfyUI生成惊艳AI图片 1. 环境准备与快速部署 1.1 硬件与软件要求 在开始之前,请确保你的系统满足以下基本要求: 显卡:NVIDIA显卡(推荐RTX 30/40系列,显存8GB&am…...

3步解锁Windows运行安卓应用:APK-Installer轻量解决方案
3步解锁Windows运行安卓应用:APK-Installer轻量解决方案 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 在数字化办公与娱乐融合的今天,安卓应用…...
)
别再死磕公式了!用Python+SymPy从零推导6轴机械臂的DH参数与正逆解(附完整代码)
用PythonSymPy自动化推导6轴机械臂运动学:从DH参数到八组逆解实战 机械臂运动学分析是机器人开发中最烧脑的环节之一。传统手工推导DH参数矩阵不仅容易出错,验证过程更是令人崩溃——想象一下,当你花了两天时间推导出十几页公式,…...

Git子模块更新报错?手把手教你解决‘Unable to find origin/master revision‘问题
Git子模块更新报错深度解析:从原理到实战解决方案 1. 问题现象与核心原因分析 当你执行git submodule update --remote命令时,突然遇到fatal: Unable to find current origin/master revision in submodule path错误提示,这种场景在团队协作…...

OpCore-Simplify:从3天手动调试到3步智能配置,黑苹果配置的自动化革命
OpCore-Simplify:从3天手动调试到3步智能配置,黑苹果配置的自动化革命 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 想象一下…...

终极指南:Czkawka开源文件管理工具,5分钟解决存储空间不足难题
终极指南:Czkawka开源文件管理工具,5分钟解决存储空间不足难题 【免费下载链接】czkawka Multi functional app to find duplicates, empty folders, similar images etc. 项目地址: https://gitcode.com/GitHub_Trending/cz/czkawka 你是否经常遇…...

告别答辩 PPT 熬夜局!PaperXie AI 一键生成,3 分钟拿捏学术范答辩神器
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AIPPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create 一、开题答辩人破防瞬间:PPT 做得好,答辩分数高一半 “论文写完了,PPT 才是真正的修罗场…...

海康MVS软件从下载到实时预览:MV-CA013-21UC工业相机5分钟极速上手教程
海康MVS软件从下载到实时预览:MV-CA013-21UC工业相机5分钟极速上手教程 工业视觉系统正成为智能制造的核心组件,而海康威视MV-CA013-21UC工业相机凭借其高帧率、低噪声和稳定性能,在自动化检测、机器人引导等领域广受欢迎。本文将带您从零开…...

Z-Image-GGUF模型量化与压缩教程:在低显存GPU上运行大模型
Z-Image-GGUF模型量化与压缩教程:在低显存GPU上运行大模型 想用AI生成图片,但一看模型大小和显存要求就头疼?手头只有一张8GB显存的消费级显卡,是不是就只能和那些功能强大的图像生成模型说再见了? 别急着放弃。今天…...