汇川SV660N与基恩士 KV7500 控制器调试说明
1. 伺服相关部分配置
1.1 伺服相关版本
SV660N 试机建议使用“SV660N-Ecat_v0.09.xml”及以上设备描述文件。
SV660N 单板软件版本建议为“H0100=901.4”及更高版本号。
1.2 相关参数说明
SV660N 对象字典中 60FD 的含义较 IS620N 有所更改:bit0、1、2 分别为负限位、正限
位、原点开关,bit16—bit20 分别对应 DI1—DI5。
2. 基恩士 KV7500 后台软件配置
基恩士后台软件为“KV STUDIO 9.45”及以上,低版本不支持基恩士 Ethercat 模块“KV-
XH16EC”的扩展。
2.1 单元配置设定
新建项目,确定后将自动弹出单元配置设定。根据提示,按需要选择“是”、“否”,“读取
单元配置”。
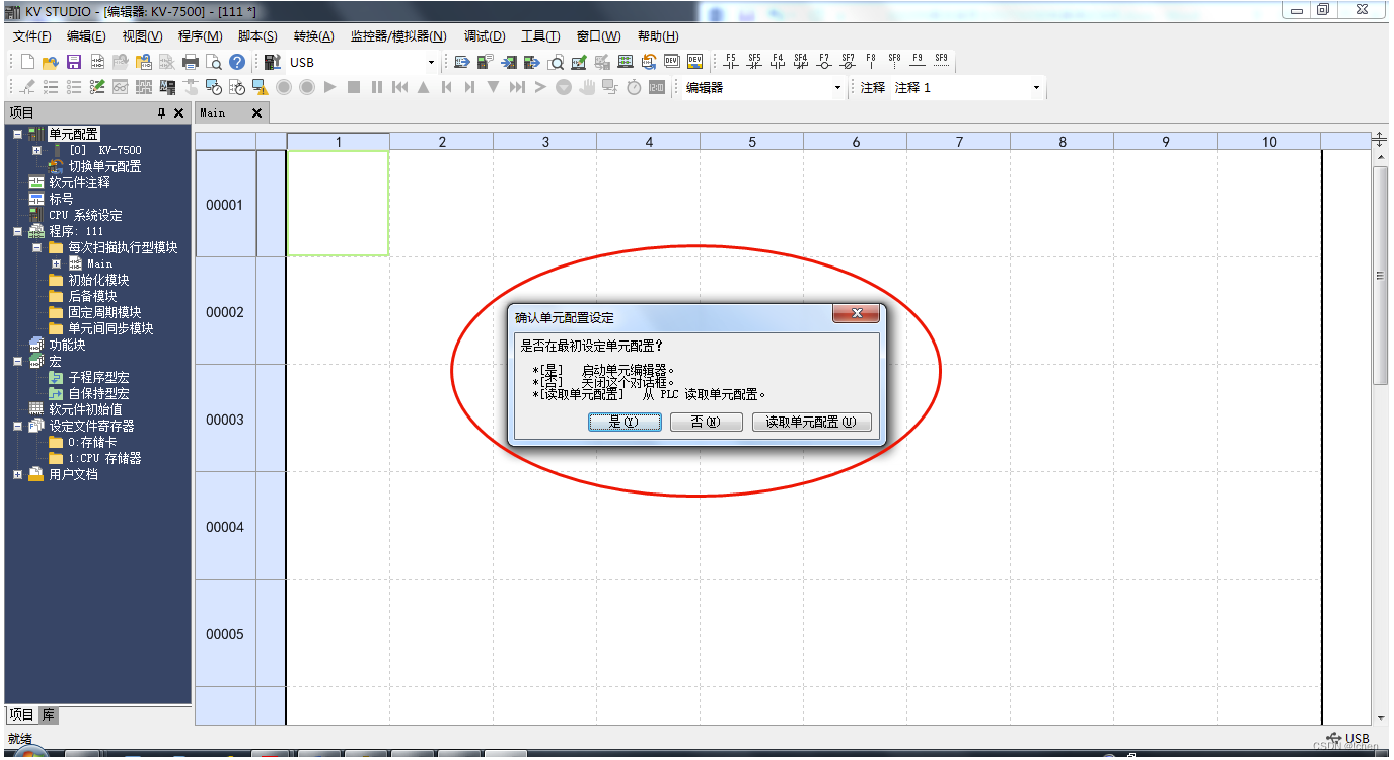
在 PLC 物理单元已经连接妥当,并与后台软件建立了通讯连接的情况下,选择“读取单
元配置”,后台软件将自动根据物理连接自动获取单元配置。
若选择“是”,将自动弹出单元编辑器对话框,可以通过拖拽已及双击的形式选择所需要
的单元进行配置。
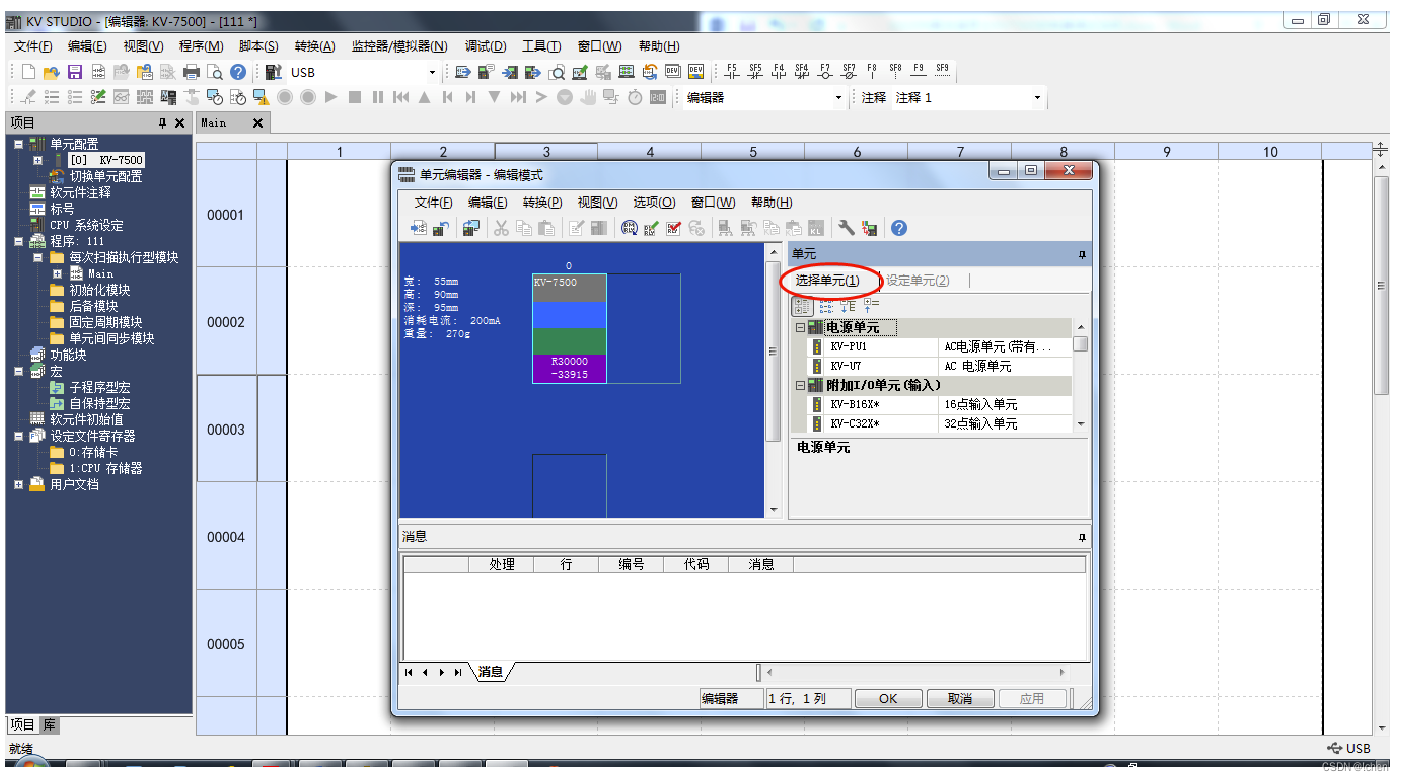 若选择“否”,可以通过“工具”-“单元编辑器”打开或者直接双击左边“项目”工作空间中
若选择“否”,可以通过“工具”-“单元编辑器”打开或者直接双击左边“项目”工作空间中
“单元配置”目录下“[0] KV7500”进行打开。

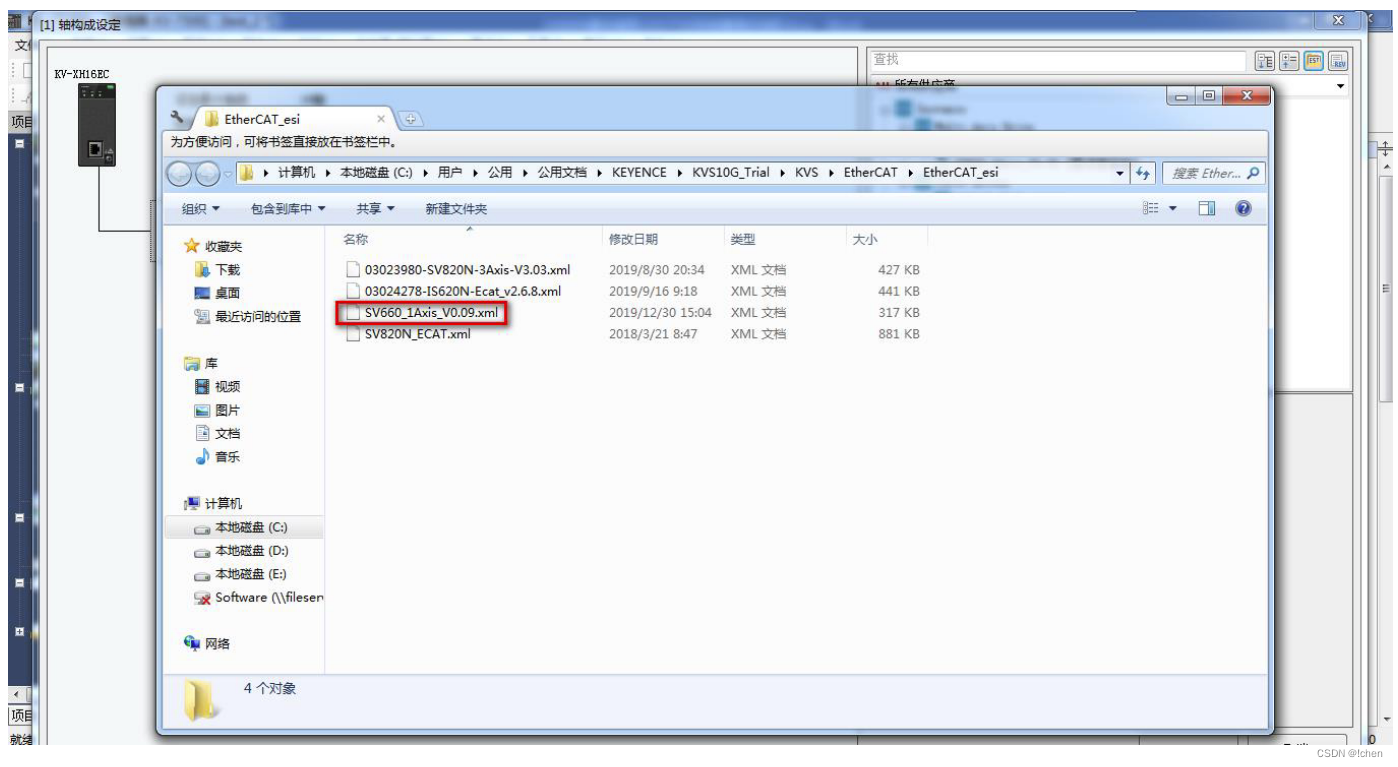
2.2 轴构成设定
打开轴构成设定,找到“ESI 文件注册”,双击打开。找到设备描述文件“.XML”存储位置,
打开,即可导入“.XML”文件。设备描述文件导入成功后,即可以添加轴。同时在轴构成
设定中,也可以设置控制周期。最小为 250us,默认为 1ms。
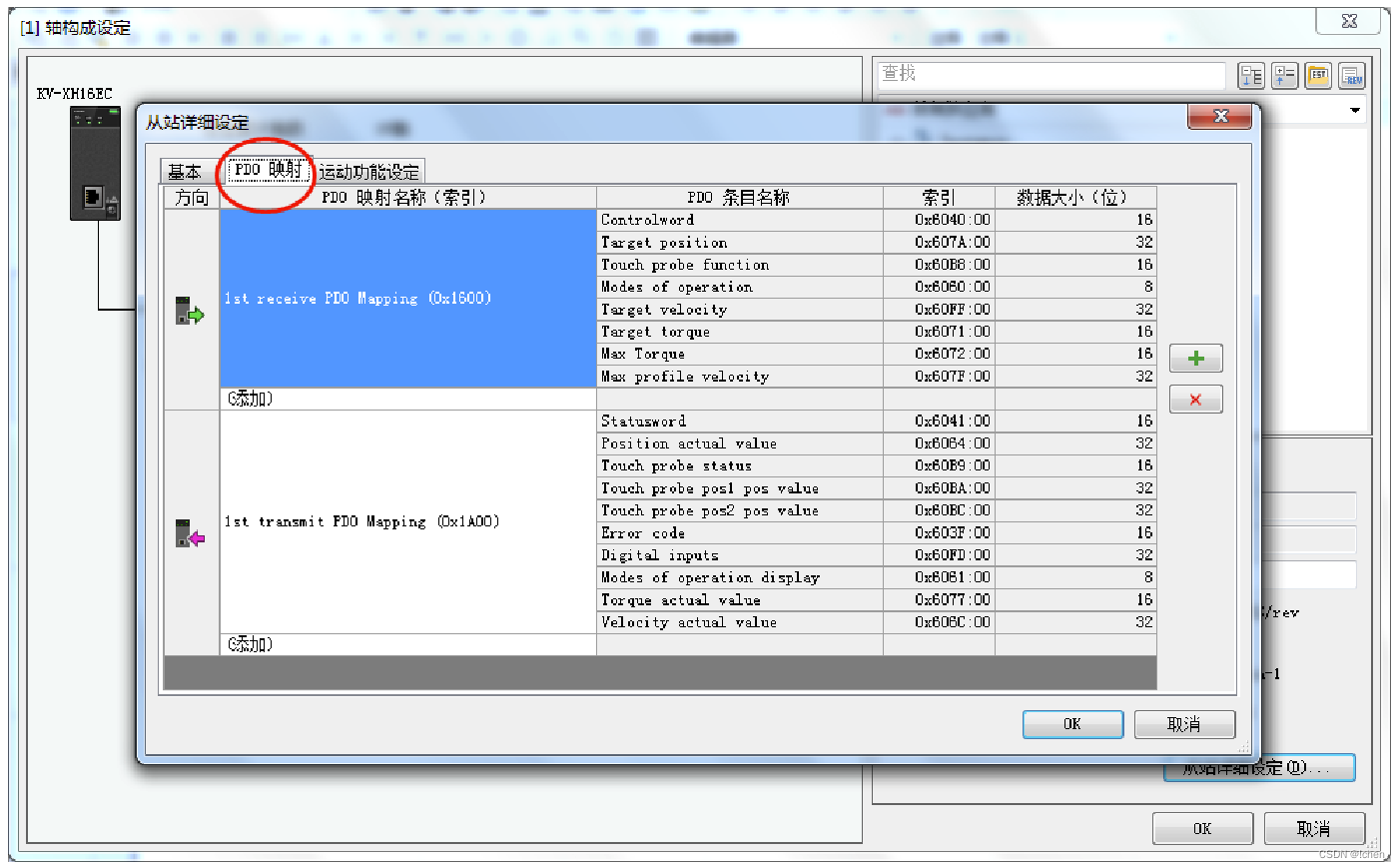
 双击或者拖拽,即可添加所需要的轴。选择相应的轴,可以设置该轴的“编码器分辨率”、
双击或者拖拽,即可添加所需要的轴。选择相应的轴,可以设置该轴的“编码器分辨率”、
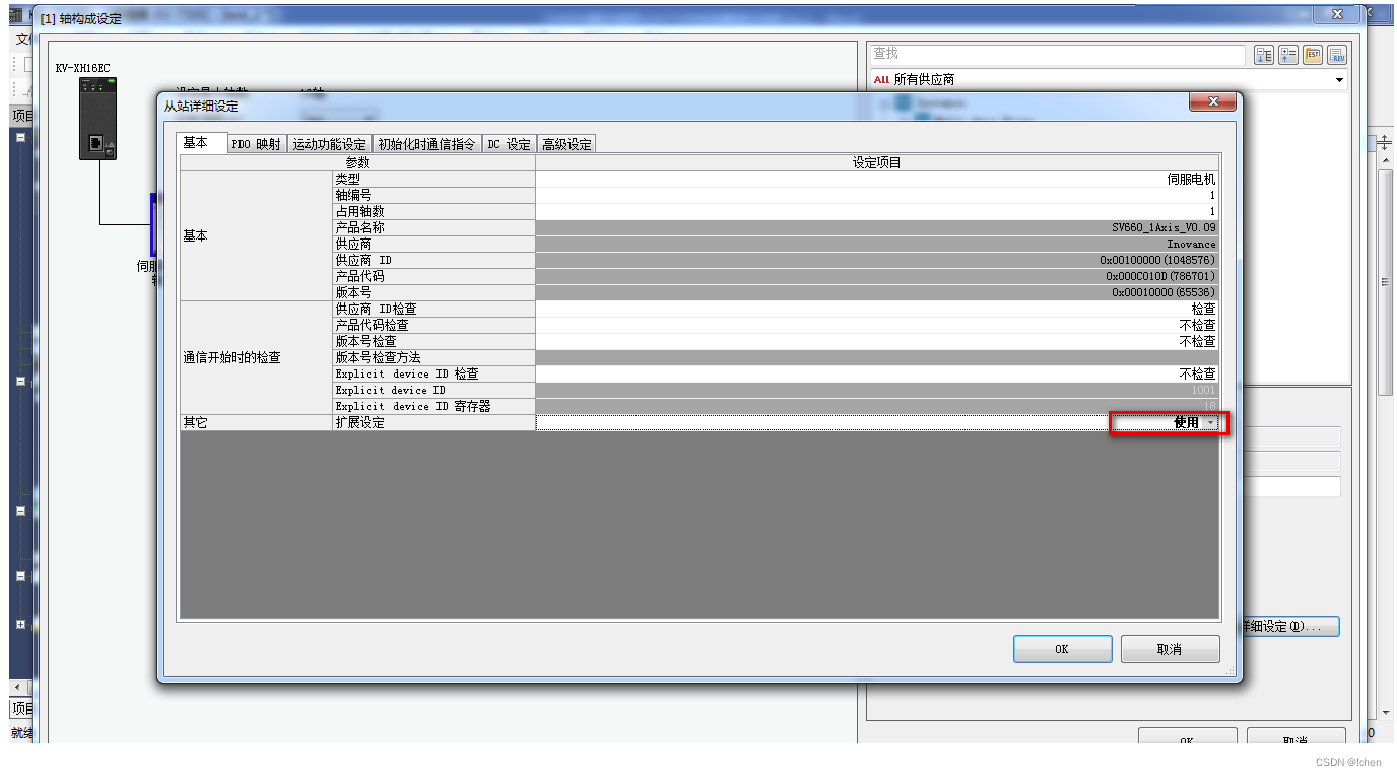
“电机最高速度”、“电机最大转矩”等关键信息。从站详情设定中可以增加 PDO 设定等。
若需要进行扩展设定,需要将其他一栏的“扩展设定”设定为使用。
运动功能设定,可以双击或者通过单击下拉框(“小三角”)进行下拉选择所需要的 PDO
配置。也可以使用快捷方式“右键”-“自动分配”-“是”进行自动分配,所匹配的内容自动与
上述的 PDO 内容一一对应。手动匹配时需要注意不要遗漏 PDO 映射中的内容,否则在
点击“OK”进行确认的时候将会弹窗提示遗漏内容。“初始时通信指令”、“DC 设定”、“高
级设定”一般保持默认值。设置完成后,点击“OK”进行确认。
 2.3 轴控制设定
2.3 轴控制设定
轴控制设定可以从“工具”-“扩展单元设定”-“KV-XH 设定”-“轴控制设定”打开,也可以从
“项目”工作空间中“轴控制设定”打开。轴控制设定中包括“单位坐标转换”、“软件限位坐
标”、“轴错误”、“轴控制功能”、“位置控制通用”、“运转速度”、“JOG”、“原点复归”、
“绝对位置跟踪控制”、“同步型跟踪控制” 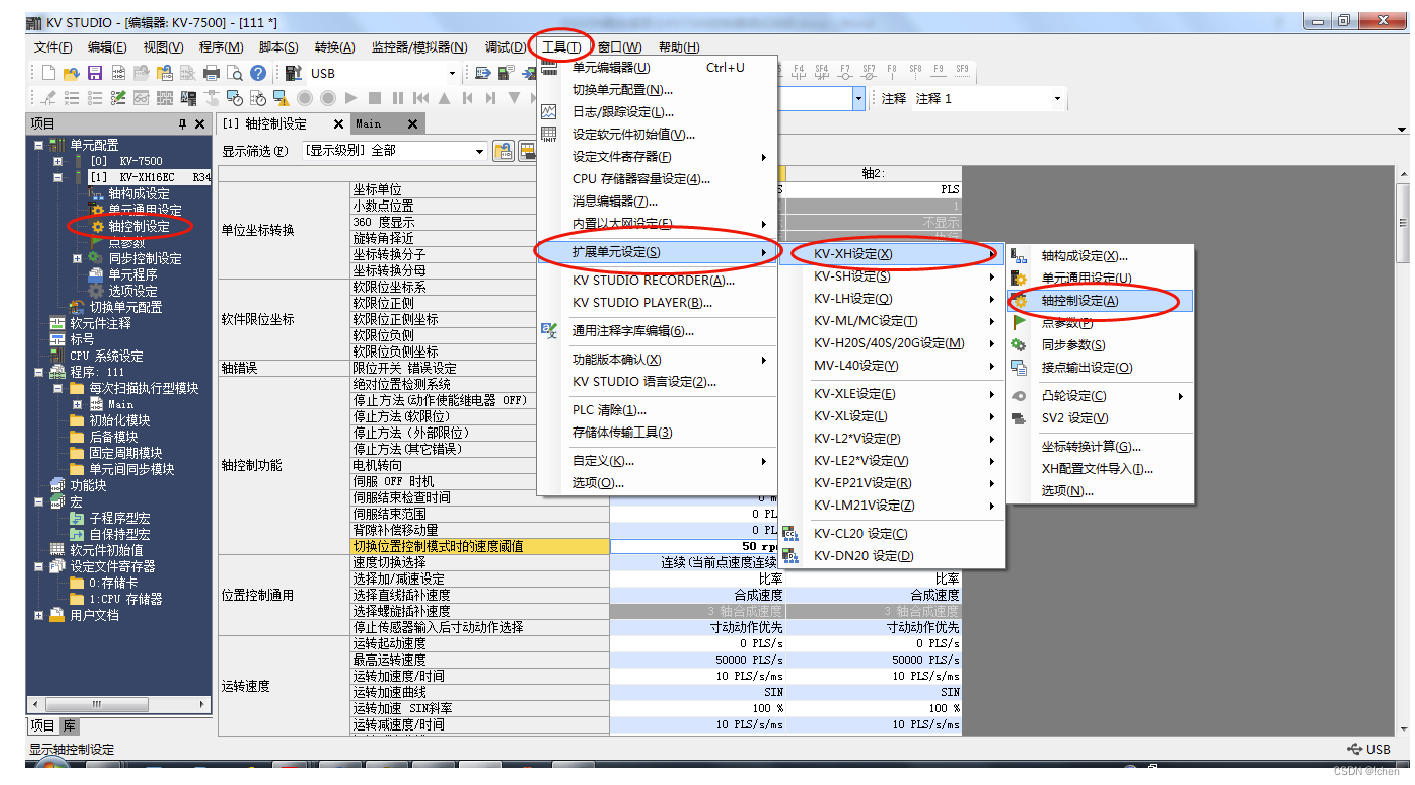
3. 运行设定
3.1 原点复归
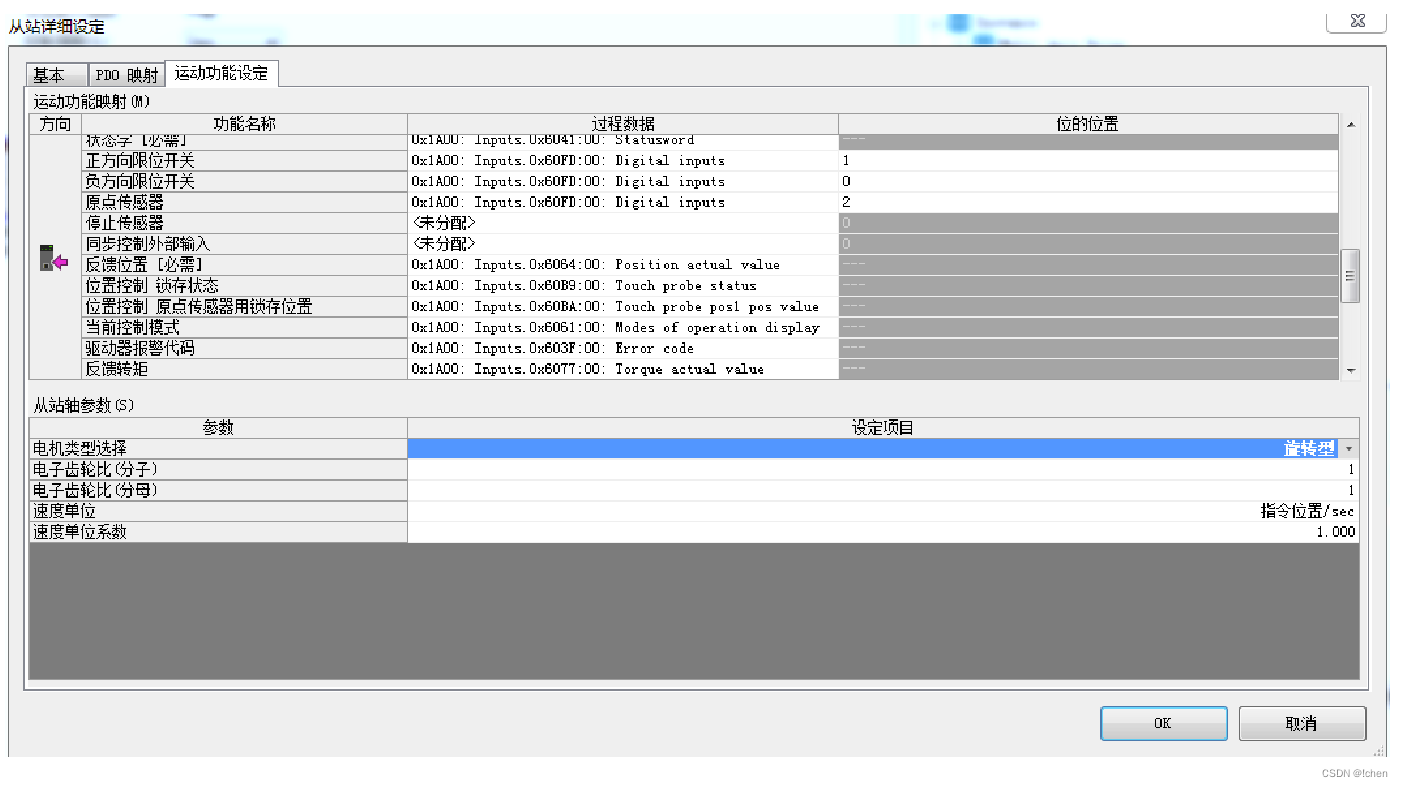
在进行原点复归之前,需要在“轴构成设定”中的“运动功能设定”中,关联“正方向
限位开关”、“负方向限位开关”、“原点传感器”等与 60FD 各 bit 位的对应关系。我司规
定的 60FD 的各位信息如下所示:
bit0、1、2 分别为负限位、正限位、原点开关,bit16—bit20 分别对应 DI1—DI5。
运动功能设定选择自动分配后,正负方向限位开关、原点传感器仍然需要手动与 60FD
的相应 bit 位进行匹配,可以采取下图所示对应关系进行分配;也可以将 bit16-bit20 分
配到正负限位开关、原点传感器上,但是这样设置之后驱动器侧就需要将对应的 DI 功
能配置成相应的正负限位开关、原点传感器等。
3.2 定位运行
定位运行前,需要设置正确的单位坐标转换。单位坐标转换默认为“PLS”,在此单位下,
坐标转换分子与分母将不能更改,假设伺服需要选择 N 圈,则上位机需要发送的指令个
数为“N*编码器一圈反馈脉冲数”。如果进行过坐标转换计算,单位坐标转换参数将自动
和坐标转换结果进行对应。
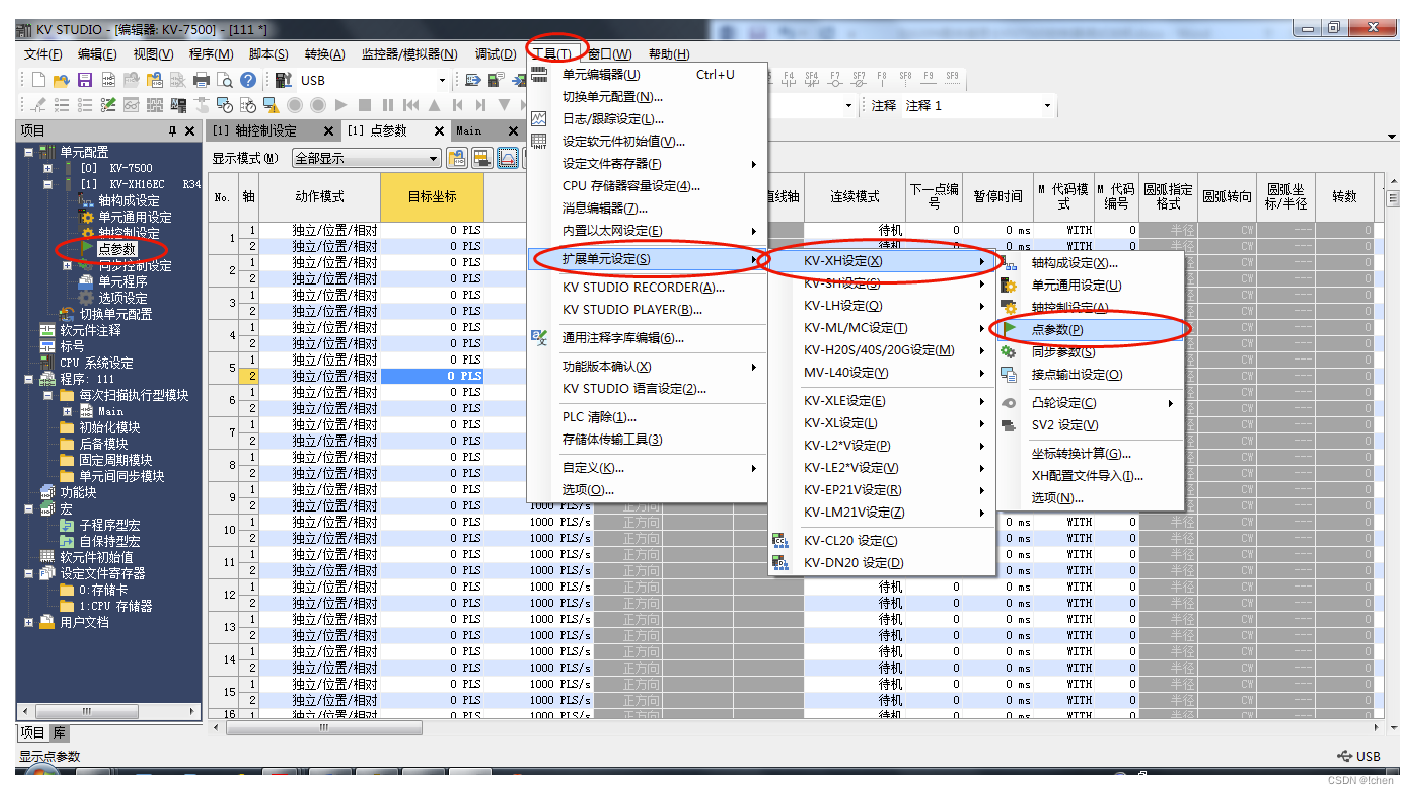
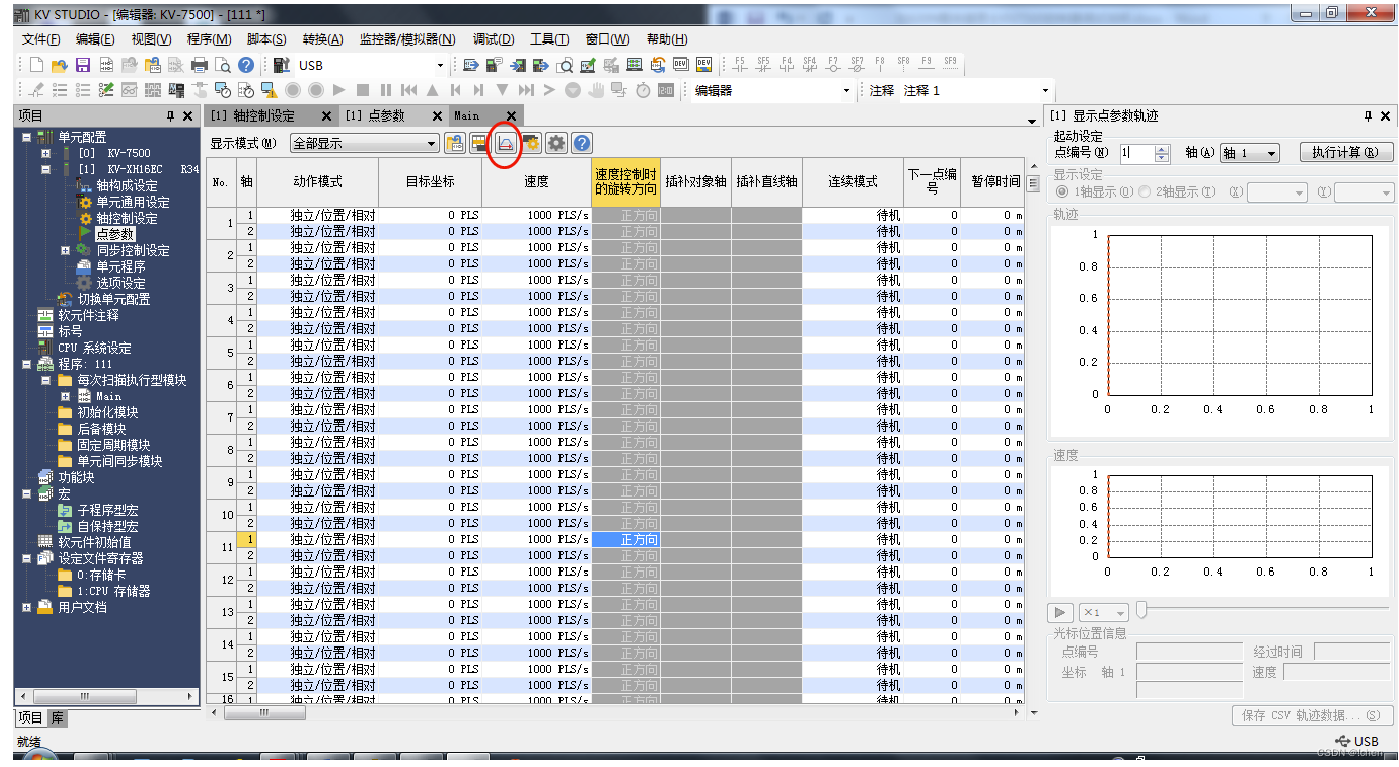
伺服运行轨迹从“点参数”中进行设定。可以根据实际要求设置每一段定位的目标坐标,
速度等,设置完成以后,即可以通过程序调用响应的点编号进行运行。
可以通过如下快捷方式预览点参数轨迹。
梯形图的编写可以使用常规方法。同时,基恩士提供了快速编写常用功能的方法。
1.鼠标左键拖住“点参数”窗口下拉,将窗口缩小放在合适位置。

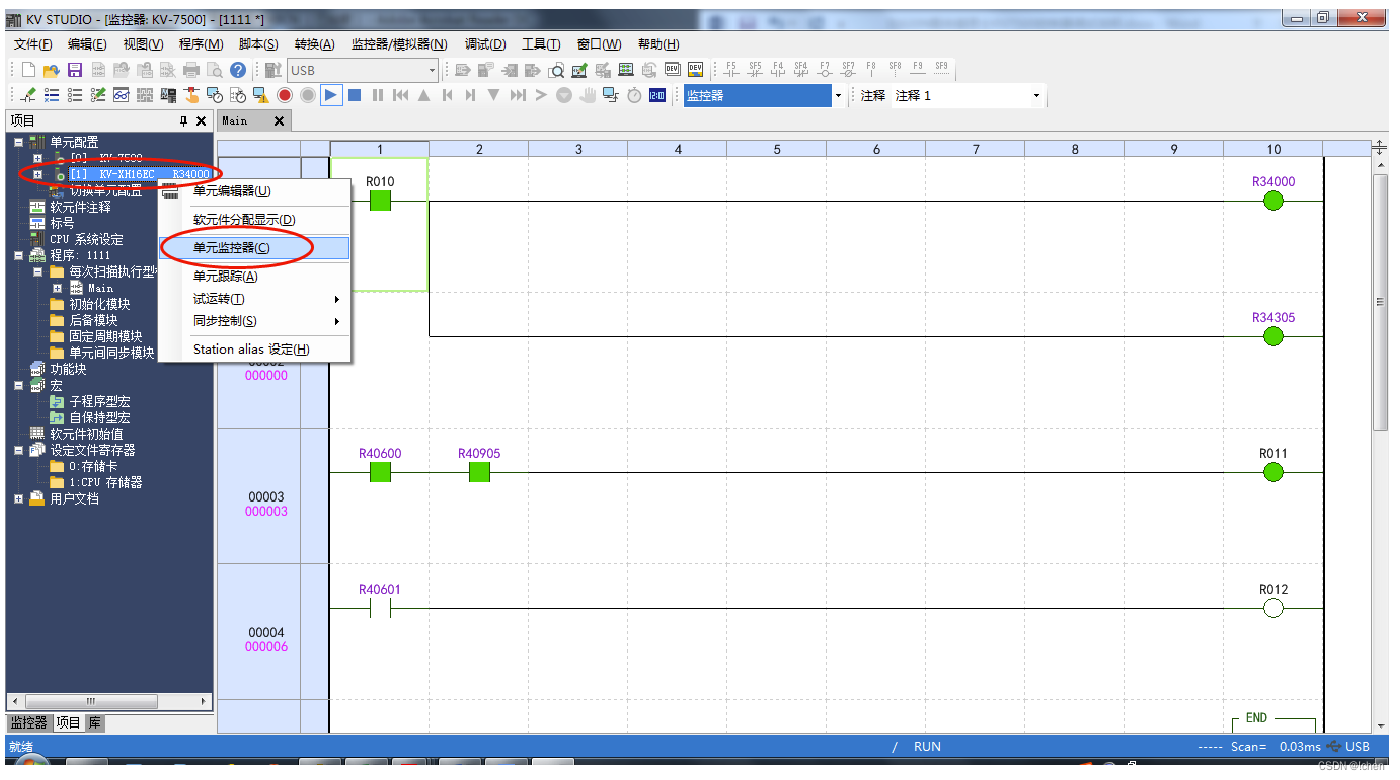
4. 单元监控器
单元监控器具有监控 KV-XH16EC 的运转状态或内部数据的功能。
在工作区单元构成中,选择要监控的单元,点击右键,从菜单选择“单元监控”。或者鼠
标左键双击,即可打开“单元监控器”。也可以在“main”程序的空白处单击右键,从弹出
的菜单中选择“单元监控器”。
5. 试运转
使用试运转功能后,无需编程梯形图程序,便可简便确认动作。在“单元监控器”右下角
可以找到“试运转功能”。 从定位控制、速度控制、转矩控制等选择控制模式,再选择试
运转的对象轴。控制模式为“速度控制模式”或“转矩控制模式”的状态下想要执行试运转
时会发生警告。执行试运转时,请将控制模式设为“位置控制模式”。下面以“试运转-定
位控制”进行介绍。

1) 动作使能、伺服ON:与梯形图程序的状态无关,“调试”可执行动作使能和伺服ON。正
常完成后,“动作就绪”、“伺服就绪”为绿色亮灯状态。为确保安全,请将CPU单元置于
PROG模式,并停止梯形图程序之后再执行操作。
a) 伺服就绪不呈绿色亮灯时,请确认以下几点。
• 是否发生轴错误
• 是否发生驱动器报警
• 伺服的主回路电源是否已连接
• 以太网电缆是否已连接
2) 轴错误/轴错误清除:发生轴错误时,可检查错误内容,执行错误清除操作。排除错误原
因后,单击“错误清除”按钮,执行错误清除操作。
3) JOG:单击“正方向”“负方向”按钮,可分别执行正/负方向 JOG 运转。相对于“轴控制通
用设定”→“JOG高速速度”设定,按照乘以一定比率后的速度进行运转。比率可在10~100%
之间按1%增量进行设定。
4) 寸动:单击“+方向”“-方向”按钮,可分别执行正/负方向寸动运转。按“轴控制通用设
定”→“JOG 起动速度”进行运转。按照“轴控制通用设定”→“JOG 寸动移动量”设定的移
动量进行运转。
5) 原点复归:单击“原点复归”按钮后,可执行原点复归。
6) 示教:单击“载入”按钮后,向指定的点编号的目标坐标的缓冲存储器存储当前的指令坐
标的值。仅在线编辑模式时可执行示教功能。示教的值同时反映到缓冲存储器和点参数。
7) 试运转:指定点编号,单击“开始”按钮后,可执行点定位。单击“停止”按钮后,则停止。
“1点运转”时,将执行指定的1个点的点定位。“连续运转”时,可执行最多连续10个点的
点定位。选中“循环”后,最下面一行的点定位完成后,会返回第1行的点定位反复执行。对于切换到下一个点的待机时间,可以在0.1~20.0秒的范围内设定。
8) 更改当前坐标:单击指令坐标后,弹出“更改当前坐标”对话框。输入想要更改的坐标,
单击“更改”按钮后,更改试运转中的轴的当前坐标,关闭“更改当前坐标”对话框。单击
“关闭”按钮后,不更改当前坐标,关闭“更改当前坐标”对话框。
相关文章:
汇川SV660N与基恩士 KV7500 控制器调试说明
1. 伺服相关部分配置 1.1 伺服相关版本 SV660N 试机建议使用“SV660N-Ecat_v0.09.xml”及以上设备描述文件。 SV660N 单板软件版本建议为“H0100901.4”及更高版本号。 1.2 相关参数说明 SV660N 对象字典中 60FD 的含义较 IS620N 有所更改:bit0、1、2 分别为负限位…...

图观 | ChatGTP是如何通过知识图谱回答问题的?
文/Emma Z1950年,图灵发表了具有里程碑意义的论文《计算机器与智能》(Computing Machinery and Intelligence),提出了一个关于机器人的著名判断原则——图灵测试,也被称为图灵判断,它指出如果第三者无法辨别…...
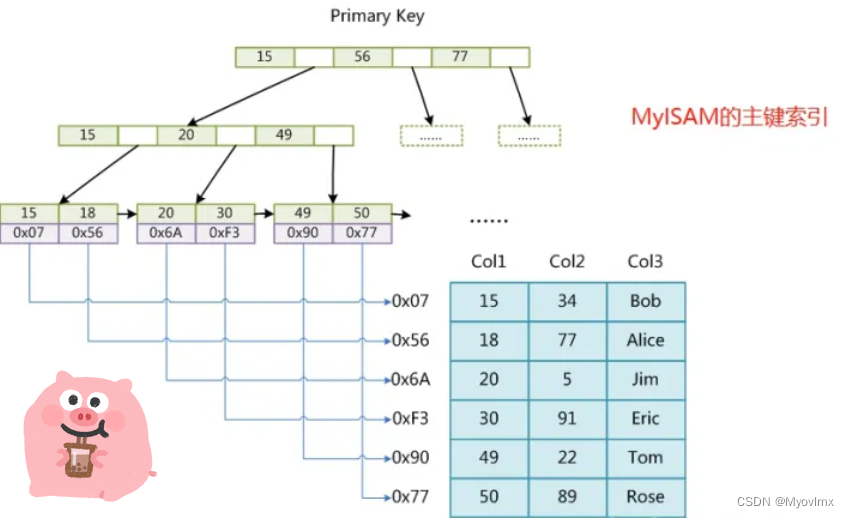
Mysql的索引
为什么写这篇文章呢~最近在梳理公司的数据库,在查看表结构的时候发现了这个 CREATE TABLE esp_5_N (ID int(11) NOT NULL AUTO_INCREMENT,pId int(11) DEFAULT NULL,EsFileId varchar(32) DEFAULT NULL,obligate1 varchar(45) DEFAULT NULL,obligate2 varchar(45) …...

计算机的发展
个人简介:云计算网络运维专业人员,了解运维知识,掌握TCP/IP协议,每天分享网络运维知识与技能。个人爱好: 编程,打篮球,计算机知识个人名言:海不辞水,故能成其大;山不辞石…...

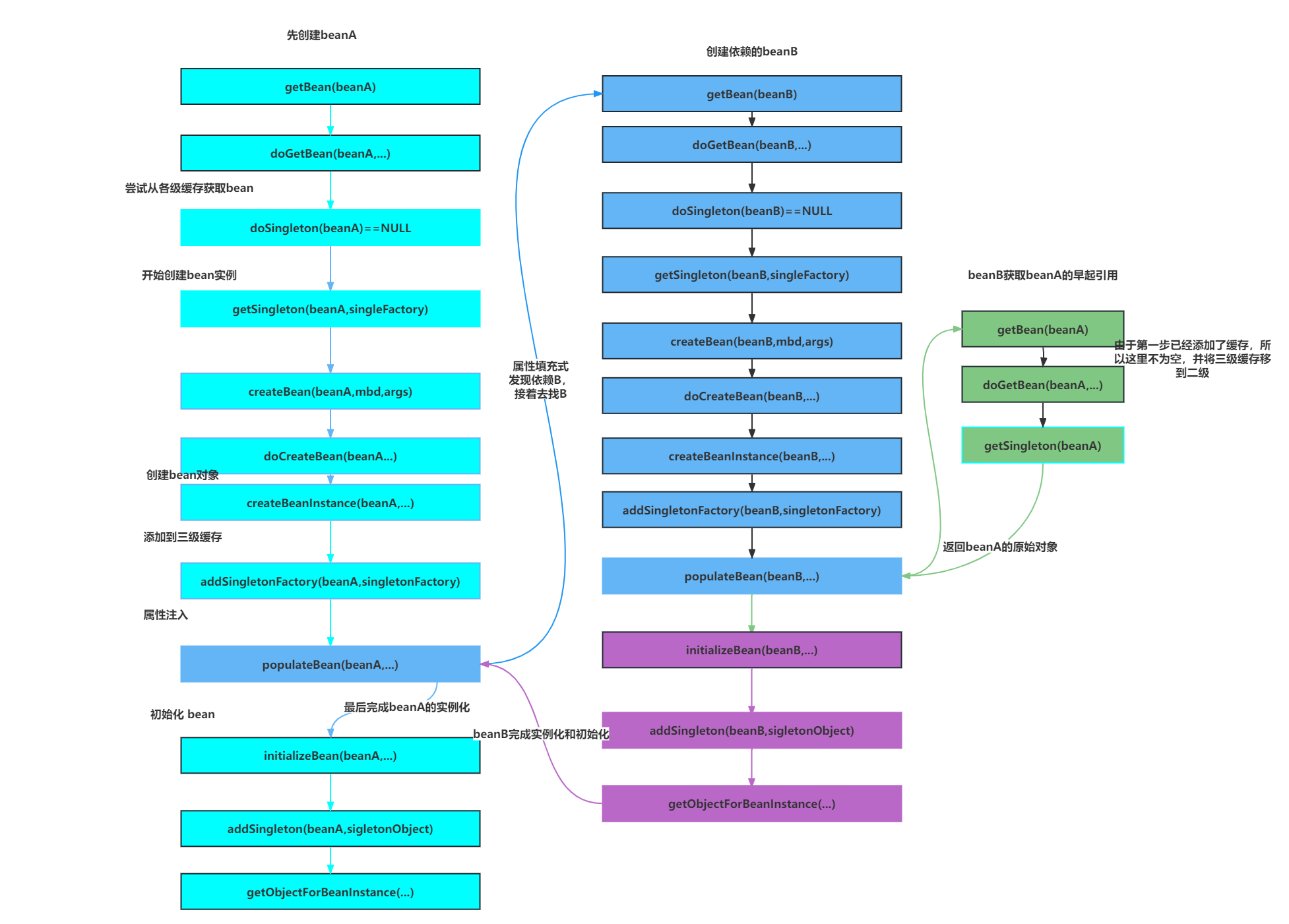
理解Spring中的依赖注入和控制反转
依赖注入(Dependency Injection)是一种面向对象编程的设计模式,用于解决对象之间的依赖关系。它的基本思想是将对象的创建和管理工作交给容器来完成,而不是在应用程序中手动创建和管理对象,从而达到松耦合、易维护、易…...
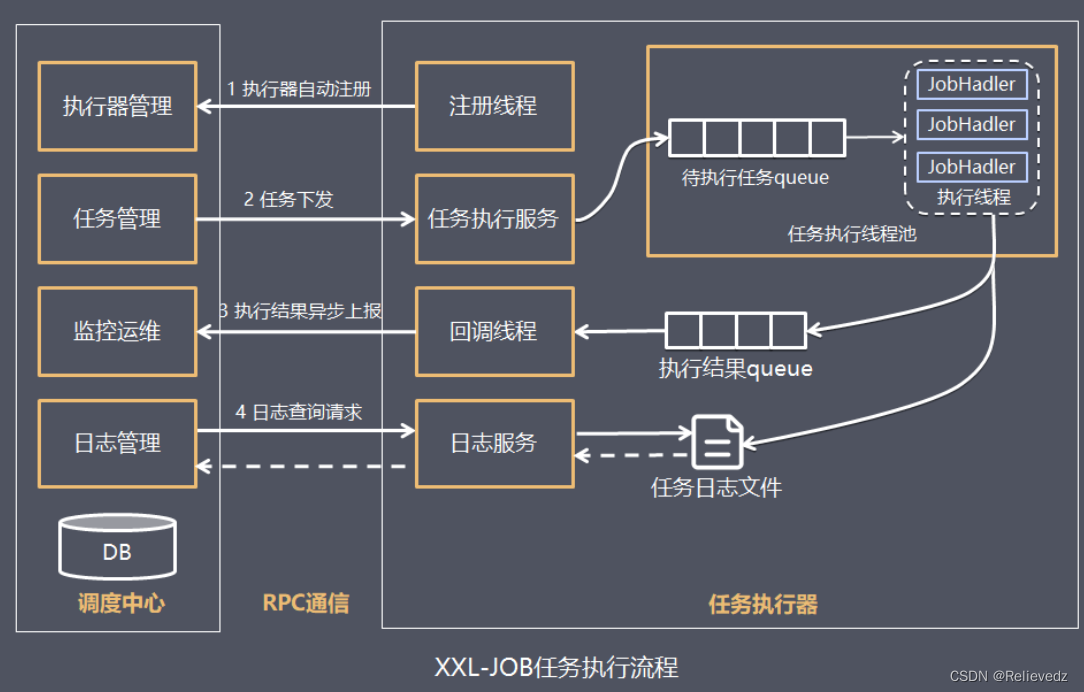
XXL-JOB
XXL-JOB介绍 XXL-JOB是一个轻量级分布式任务调度平台,其核心设计目标是开发迅速、学习简单、轻量级、易扩展。现已开放源代码并接入多家公司线上产品线,开箱即用。 官网:https://www.xuxueli.com/xxl-job/ 文档:分布式任务调度…...

「牛客网C」初学者入门训练BC134,BC136
🐶博主主页:ᰔᩚ. 一怀明月ꦿ ❤️🔥专栏系列:线性代数,C初学者入门训练 🔥座右铭:“不要等到什么都没有了,才下定决心去做” 🚀🚀🚀大家觉不错…...

华为OD机试题【翻转单词顺序】用 C++ 进行编码 (2023.Q1)
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为od机试,独家整理 已参加机试人员的实战技巧文章目录 最近更新的博客使用说明翻转单…...
4.Spring【Java面试第三季】
4.Spring【Java面试第三季】前言推荐4.Spring27_Aop的题目说明要求Spring的AOP顺序AOP常用注解面试题28_spring4下的aop测试案例业务类新建一个切面类MyAspect并为切面类新增两个注解:spring4springboot1.5.9pom测试类29_spring4下的aop测试结果aop正常顺序异常顺序…...

ZLibrary使用说明-Zlirbrary
ZLibrary使用说明如果您是一位书虫,那么ZLibrary是一个值得一试的网站。该网站提供了大量的免费电子书籍,涵盖了各种不同的主题和类别。下面是一些有关如何使用ZLibrary的详细说明:第1步:访问ZLibrary网站要使用ZLibraryÿ…...
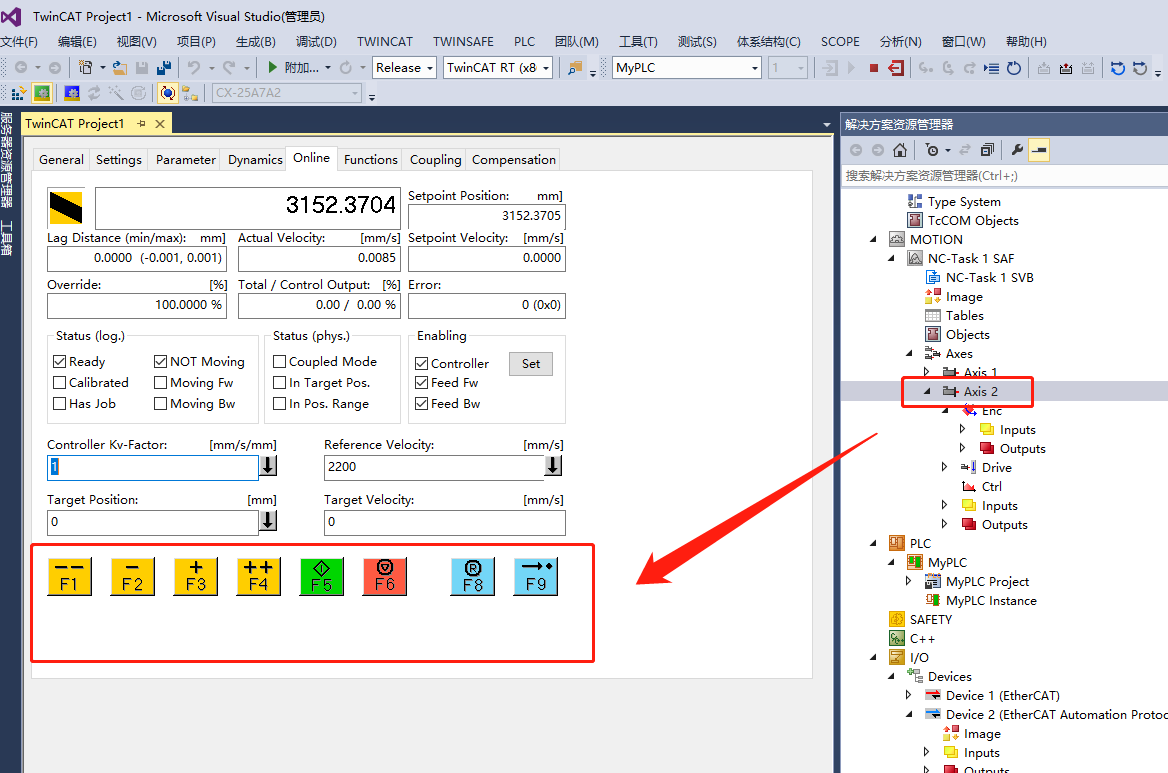
TwinCAT3第三方伺服电机——汇川SV660N使用
目录 一、第三方伺服在TC3中配置和使用 二、xml文件拷贝 编辑 三、IO中扫描伺服 四、工程测试 五、汇川伺服参数设置说明 一、第三方伺服在TC3中配置和使用 在倍福控制系统中使用第三方伺服可以参见本人另一篇博客,有详细教程说明。本文仅仅对SV660N伺服设置…...

进制转换(二进制,八进制,十进制,十六进制)涵盖整数与小数部分,内容的图片全为手写【详细图解】
各种进制之间的相互转换1. 各进制表示数1.1 数码1.2 基数1.3 位权2. 十进制转换为其他进制2.1 整数部分2.2 小数部分3. 其他进制转换为十进制4. 二进制转换为八进制5. 二进制转换为十六进制6. 八进制转换为十六进制1. 各进制表示数 二进制:0,1逢二进一 八…...
谈谈XR关键技术及VR/AR/MR/XR关系
一、先别被VR/AR/MR/XR搞晕,说说区别虚拟现实(Virtual Reality,VR)、增强现实(Augmented Reality,AR)等业务以其三维化、自然交互、空间计算等完全不同于当前移动互联网的特性,被认为…...
acwing1562 微博转发(宽搜)
微博被称为中文版的 Twitter。 微博上的用户既可能有很多关注者,也可能关注很多其他用户。 因此,形成了一种基于这些关注关系的社交网络。 当用户在微博上发布帖子时,他/她的所有关注者都可以查看并转发他/她的帖子,然后这些人…...

如何使用Arsenal快速部署功能强大的Bug Bounty工具
关于Arsenal Arsenal是一个功能强大且使用简单的Shell脚本(Bash),该工具专为漏洞赏金猎人设计,在该工具的帮助下,我们可以轻松在自己环境中安装并部署目前社区中功能最为强大的网络侦查工具、漏洞扫描工具和其他安全研…...
python网络爬虫(理论+实战)——正则表达式再讨论、常用正则表达式整理)
(十)python网络爬虫(理论+实战)——正则表达式再讨论、常用正则表达式整理
系列文章目录 (1)python网络爬虫—快速入门(理论+实战)(一) (2)python网络爬虫—快速入门(理论+实战)(二) (3) python网络爬虫—快速入门(理论+实战)(三) (4)python网络爬虫—快速入门(理论+实战)(四) (5)...

MyBatis-Plus特性及插件整合
了解MyBatis-Plus 什么是MyBatis-Plus? mybatisPlus在mybatis的基础上继续针对CRUD操作进行优化,在原有的基础上提供了公共的接口BaseMapper,我们在创建接口Mapper时只需要继承这个接口即可调用MyBatisPlus已经提供好的方法,sql…...
应用篇|网络安全知识培训考试,答题小程序操作指引
网络安全知识培训考试,答题小程序操作指引关于全民防诈反诈宣传或者网络安全知识学习,如何进行组织一场微信线上答题考试?可以在小程序“护网专题信息安全知识竞答”,先创建一个学习单位/小组,再邀请成员加入单位/小组…...
官方不推荐@Autowired
1用lombok注解 2 构造器...
【牛客刷题专栏】0x0E:JZ6 从尾到头打印链表(C语言编程题)
前言 个人推荐在牛客网刷题(点击可以跳转),它登陆后会保存刷题记录进度,重新登录时写过的题目代码不会丢失。个人刷题练习系列专栏:个人CSDN牛客刷题专栏。 题目来自:牛客/题库 / 在线编程 / 剑指offer: 目录前言问题…...

Axolotl与LLaMA-Factory对比:架构与扩展性分析-方案选型对比
1. 问题背景与选型目标 在大型语言模型(LLM)落地的浪潮中,“微调”已从少数研究团队的实验行为,变为大量中小企业甚至个人开发者的刚需。业务团队不再仅仅使用 API 调用闭源模型,而是希望基于开源基座模型(…...

技术演讲的恐惧症:从实验室到舞台的艰难跨越
一、实验室里的从容,舞台上的慌乱对于软件测试从业者而言,实验室是我们的“舒适区”。在堆满服务器、屏幕上跳动着代码与测试用例的空间里,我们能精准定位一行代码的bug,能设计出覆盖所有场景的测试方案,能在复杂的系统…...

基于Vue的纯前端的库存销售系统
🚀【开源】 基于Vue的纯前端的库存销售系统 项目地址:https://github.com/cuiyunhao-2026/warhouse-sales-management-system 这是基于art design pro模板的二次开发 模板地址:https://github.com/Daymychen/art-design-pro 你是否&#x…...

Spring Boot项目整合阿里云OSS上传,如何避免Nginx代理下的405坑?
Spring Boot整合阿里云OSS上传的Nginx避坑指南:彻底解决405错误 在前后端分离架构中,文件上传功能几乎是每个Web应用的标配。当我们将Spring Boot与阿里云OSS结合使用时,Nginx作为反向代理常常会带来一个棘手的405 Method Not Allowed错误。这…...

5分钟免费解锁iPhone激活锁:applera1n实用指南
5分钟免费解锁iPhone激活锁:applera1n实用指南 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 面对二手iPhone的激活锁界面,你是否感到束手无策?applera1n是一款专为…...

90%的程序员都不知道,转大模型根本不用从头学深度学习
文章目录前言一、大模型时代,传统深度学习的学习路径已经彻底过时了1.1 以前做AI,确实得先学深度学习1.2 现在做AI,更像是开汽车1.3 90%的大模型岗位,根本不需要深度学习底层知识二、90%的大模型开发工作,到底在做什么…...
用C++实现信奥题 P8563 Magenta Potion)
打卡信奥刷题(3245)用C++实现信奥题 P8563 Magenta Potion
P8563 Magenta Potion 题目描述 给定一个长为 nnn 的整数序列 aaa,其中所有数的绝对值均大于等于 222。有 qqq 次操作,格式如下: 1 i k\texttt{1 i k}1 i k,表示将 aia_iai 修改为 kkk。保证 $k $ 的绝对值大于等于 222。 2 l r…...

如何快速掌握ComfyUI图像修复插件:终极完整使用指南
如何快速掌握ComfyUI图像修复插件:终极完整使用指南 【免费下载链接】comfyui-inpaint-nodes Nodes for better inpainting with ComfyUI: Fooocus inpaint model for SDXL, LaMa, MAT, and various other tools for pre-filling inpaint & outpaint areas. 项…...

Ubuntu16.04高效桌面管理全攻略:多工作区、分屏与终端Terminator进阶技巧
1. Ubuntu16.04多工作区高效管理 刚接触Ubuntu时,最让我惊喜的功能就是多工作区。这个功能相当于给你的电脑桌面"扩容",把不同任务分散到不同虚拟桌面,再也不用在一堆窗口里来回切换了。在Ubuntu16.04上设置多工作区特别简单&#…...

ChatGPT写论文被判AI怎么办?降AI率完整应对攻略+工具推荐!
ChatGPT写论文被判AI怎么办?降AI率完整应对攻略工具推荐! ChatGPT 是 2022 年起最早被广泛使用的大模型,现在依然是不少留学生、研究生写英文论文/中文论文的首选。但它写出来的论文在 AIGC 检测平台(Turnitin、知网英文模块、维普…...