Ubuntu18.04安装LeGO-LOAM保姆级教程
系统环境:Ubuntu18.04.6 LTS
1.LeGO-LOAM的安装前要求:
1.1 ROS安装:参考我的另一篇博客Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客文章浏览阅读168次。Ubuntu18.04安装ROS-melodic保姆级教程https://blog.csdn.net/qq_23473839/article/details/131719477
1.2 gtsam安装:
GTSAM源码包:
https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip一定要跟官网同步去下载gtsam-4.0.0-alpha2 。
亲测gtsam-4.0.0运行.launch文件会报[mapOptmization-7] process has died 的错误!!!
报错后安装libparmetis-dev不能解决,非常痛苦!!!
1.sudo apt-get update -y
2.sudo apt-get install -y libparmetis-dev
亲测gtsam-4.2a7 可完美安装并兼容eigen-3.3.9
下面按照LeGO-LOAM官网安装gtsam-4.0.0-alpha2 。
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip #替换成自己的目录
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake .. #做完这一步不用make check 直接make install
sudo make install # 花费时间较久,无报错显示100%即为安装完成2.安装LeGO-LOAM:
2.1.建立catkin工作空间(我取名为LeGO-LOAM)
2.2.建立src文件夹
2.3.下载并编译
cd ~/catkin_ws/src #替换成自己的目录
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1 #LeGo-LOAM作者说第一次要用j1 以后再次编译可以放飞自我3.运行LeGO-LOAM:
Shell1:
source devel/setup.bash
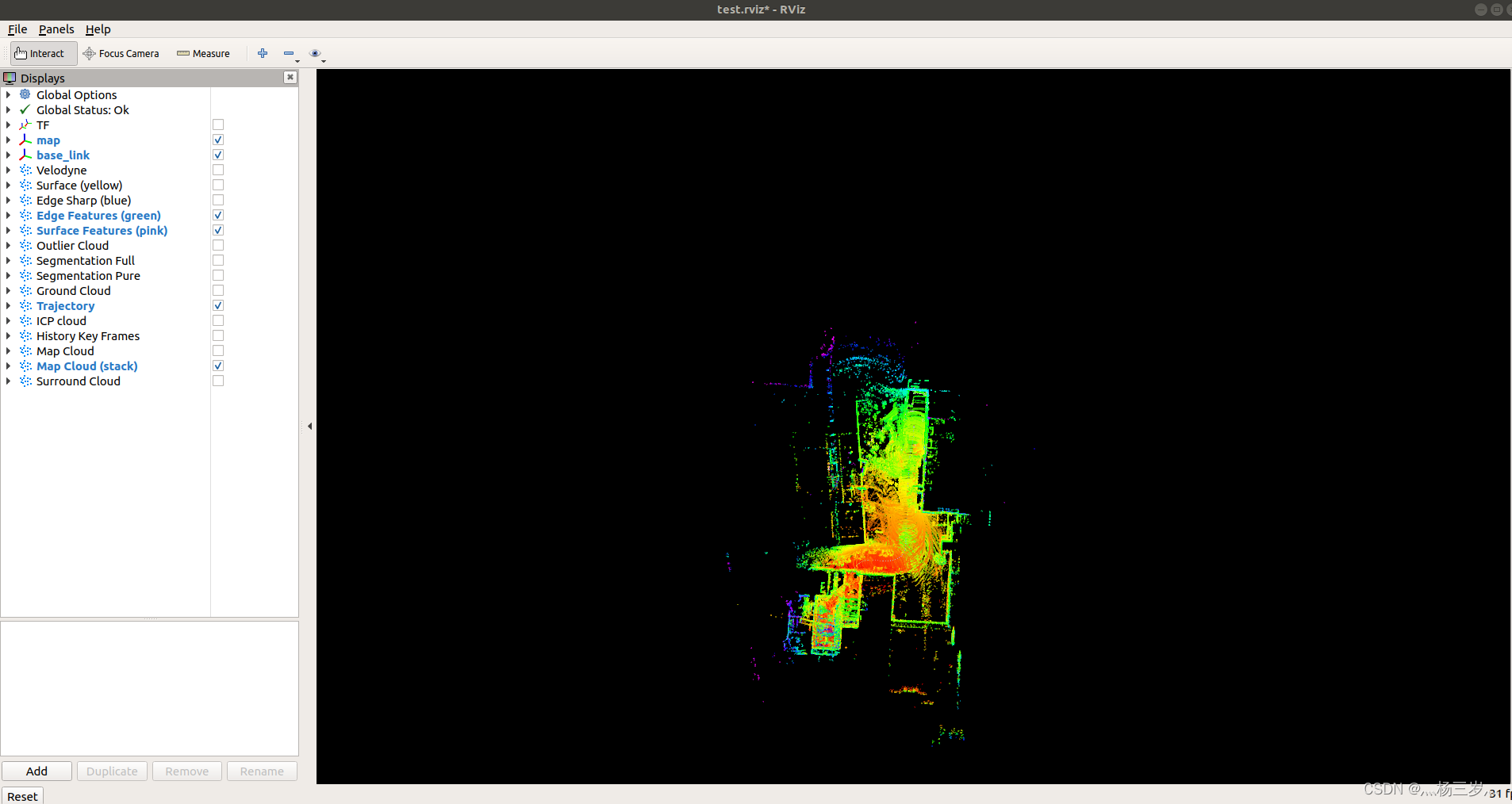
roslaunch lego_loam run.launchShell2:(跑LeGO-LOAM的数据集,直接用nsh_indoor_outdoor.bag以前LOAM的数据集就行)
rosbag play nsh_indoor_outdoor.bag --clock --topic /velodyne_points /imu/data这里注意:一定要写上后面的--clock 要不然在rviz里面是真不显示数据呀!真难受!
结果:
相关文章:
Ubuntu18.04安装LeGO-LOAM保姆级教程
系统环境:Ubuntu18.04.6 LTS 1.LeGO-LOAM的安装前要求: 1.1 ROS安装:参考我的另一篇博客Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客文章浏览阅读168次。Ubuntu18.04安装ROS-melodic保姆级教程https://blog.csdn.net/…...
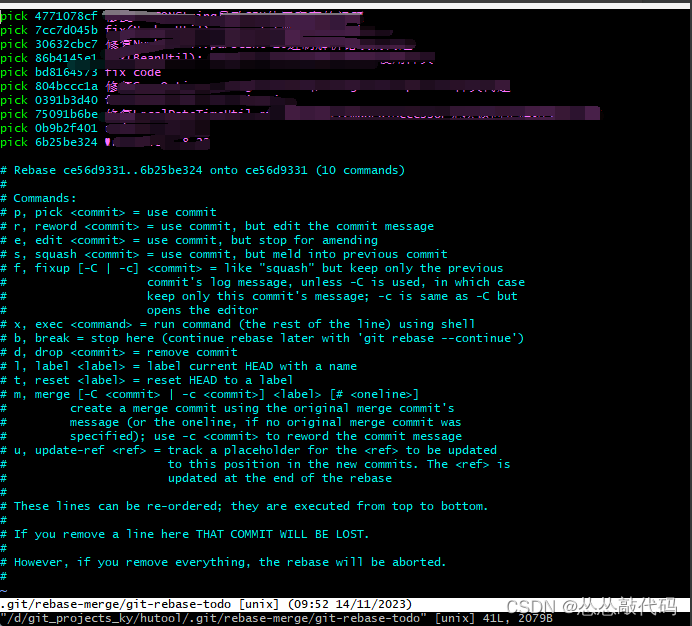
git修改commit历史提交时间、作者
1、修改最近的几条记录,进入提交记录列表,修改提交记录模式 git rebase -i HEAD~3 // 修改最近的三条记录,顺序排列按提交时间升序 指令说明: pick:保留该commit(缩写:p) reword:…...
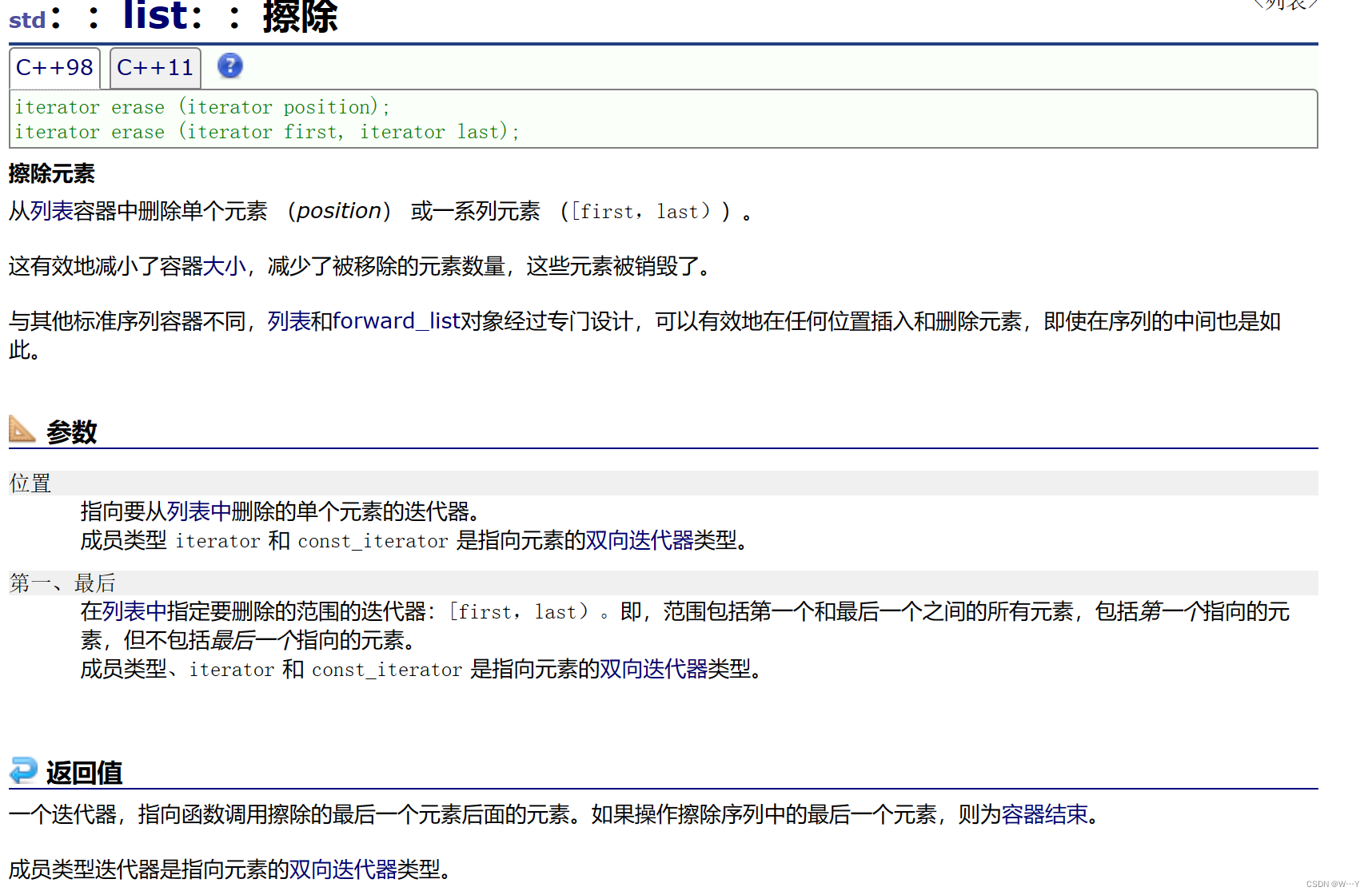
【C++历练之路】list的重要接口||底层逻辑的三个封装以及模拟实现
W...Y的主页 😊 代码仓库分享💕 🍔前言: 在C的世界中,有一种数据结构,它不仅像一个神奇的瑰宝匣,还像一位能够在数据的海洋中航行的智慧舵手。这就是C中的list,一个引人入胜的工具…...
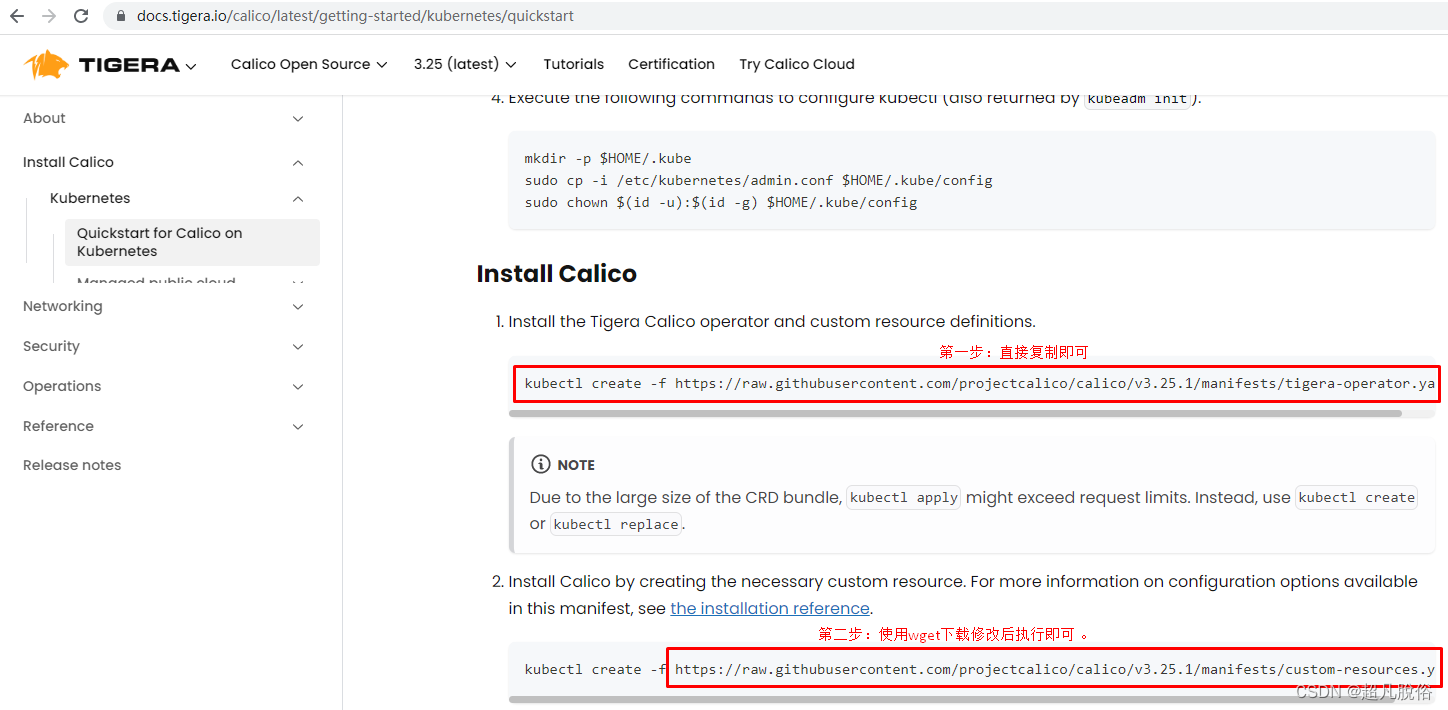
Kubeadm部署Kubernetes Containerd集群
文章目录 概述一、硬件系统二、基础配置设置主机名配置主机名与IP地址解析关闭防火墙与selinux时间同步(ntp)升级系统内核配置内核转发及网桥过滤*安装ipset及ipvsadm关闭SWAP分区 三、Containerd准备Containerd获取下载解压Containerd配置文件生成并修改Containerd启动及开机自…...

OpenCV入门9——目标识别(车辆统计)
文章目录 图像轮廓查找轮廓绘制轮廓轮廓的面积与周长多边形逼近与凸包外接矩形项目总览【车辆统计】视频加载【车辆统计】去背景【车辆统计】形态学处理【车辆统计】逻辑处理【车辆统计】显示信息【车辆统计】 图像轮廓 查找轮廓 # -*- coding: utf-8 -*- import cv2 import n…...
)
2023前端大厂高频面试题之JavaScript篇(5)
系列文章: 2023前端大厂高频面试题之JavaScript篇(1) 2023前端大厂高频面试题之JavaScript篇(2) 2023前端大厂高频面试题之JavaScript篇(3) 2023前端大厂高频面试题之JavaScript篇(4) 2023前端大厂高频面试题之JavaScript篇(5) 2023前端大厂高频面试题之HTML篇 2023前端大厂高…...

物联网网关在工业行业的应用案例
物联网网关在工业行业的应用案例 随着物联网技术的不断发展,物联网网关在工业行业的应用越来越广泛。本文将介绍一个物联网网关在工业行业的应用案例,以期为相关领域的研究和实践提供借鉴和启示。 一、案例背景 某大型制造企业是一家全球知名的汽车制…...

5、基础入门——资产架构端口应用WAF站库分离负载均衡
资产架构 目录型网站安全:一个IP对应一个域名(bbs.xiaodi8.com),该域名(bbs.xiaodi8.com)下有一个网站,该域名的某个目录下(bbs.xiaodi8.com/blog)也有一个网站。 端口型…...
golang学习笔记——接口和继承比较1
继承 Go 语言的设计之初,就不打算支持面向对象的编程特性,因此 Go 不支持面向对象的三大特性之一——继承。但是 Go 可以通过组合的思想去实现 “继承”。继承是面向对象的三大特性之一,继承是从已有的类中派生出新的类,新的类能…...
)
chatGPT快捷键(最新版本)
chatGPT 快捷键,可以用于获取最新的一条回复内容 ChatGPT的API接口相当贵,有了快捷键功能,我们可以使用python的selenium控件模拟点击来实现自动化功能,通过发送快捷键来获取最新的回复内容 快捷键介绍如下: windows…...
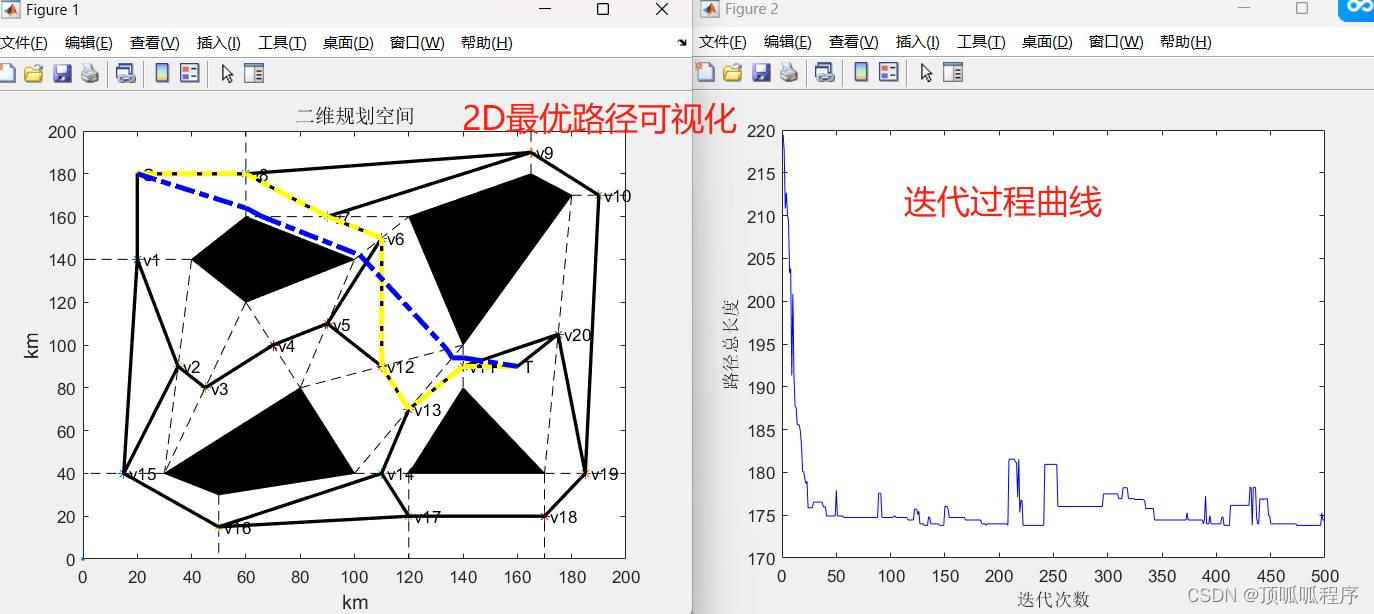
77基于matlab的蚁群优化路径算法,二维路径和三维路径优化
基于matlab的蚁群优化路径算法,二维路径和三维路径优化。输出可视化最优路径和距离迭代曲线。数据可更换自己的,程序已调通,可直接运行。 77三维和二维路径可视化 (xiaohongshu.com)...

PyTorch中并行训练的几种方式
❤️觉得内容不错的话,欢迎点赞收藏加关注😊😊😊,后续会继续输入更多优质内容❤️ 👉有问题欢迎大家加关注私戳或者评论(包括但不限于NLP算法相关,linux学习相关,读研读博…...
结点结构的二叉树的层序输入创建以及遍历)
基于非链式(数组)结点结构的二叉树的层序输入创建以及遍历
点击链接返回标题->基于非链式(数组)结点结构的二叉树的层序、先序、中序、后序输入创建以及层序、先序、中序、后序输出-CSDN博客 层序可谓是最简单的二叉树遍历了。。。。 代码很浅显易懂,相信你能明白的! #include<iostream> using namesp…...

云计算:开辟数字时代的无限可能
云计算是一项革命性的技术,为企业和个人提供了灵活、可扩展和高效的计算资源。本文将介绍云计算的概念、架构和优势,并探讨其在数字化时代的重要性和未来发展趋势。 引言 随着信息技术的日新月异和数字化转型的浪潮席卷全球,云计算作为一种颠…...
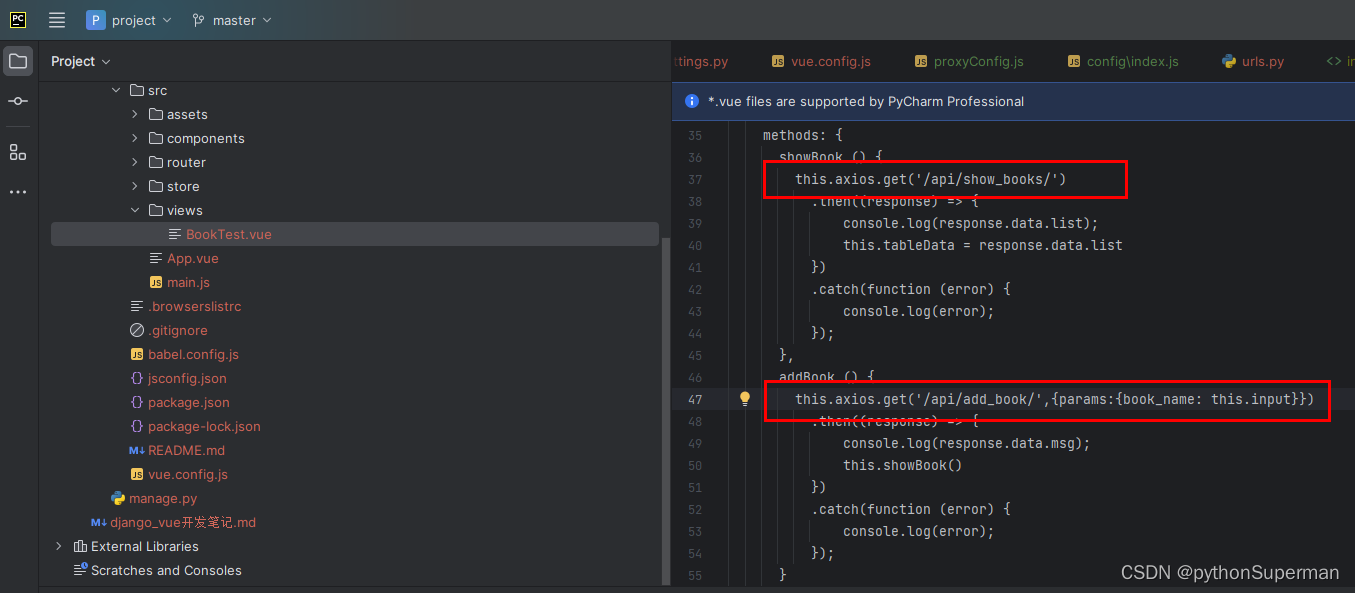
Django+Vue项目创建 跑通
参考链接: 【精选】DjangoVue项目构建_django vue-CSDN博客 一、背景 主要介绍如何使用后端Django 前端Vue 的技术栈快速地搭建起一套web项目的框架。 为什么使用Django和Vue? Django是Python体系下最成熟的web框架之一,由于Python语言的易用…...
2023年中职“网络安全“—Linux系统渗透提权②
2023年中职"网络安全"—Linux系统渗透提权② Linux操作系统渗透测试任务环境说明:1. 使用渗透机对服务器信息收集,并将服务器中SSH服务端口号作为flag提交;2. 使用渗透机对服务器信息收集,并将服务器中主机名称作为flag…...
多模态大模型训练数据集汇总介绍
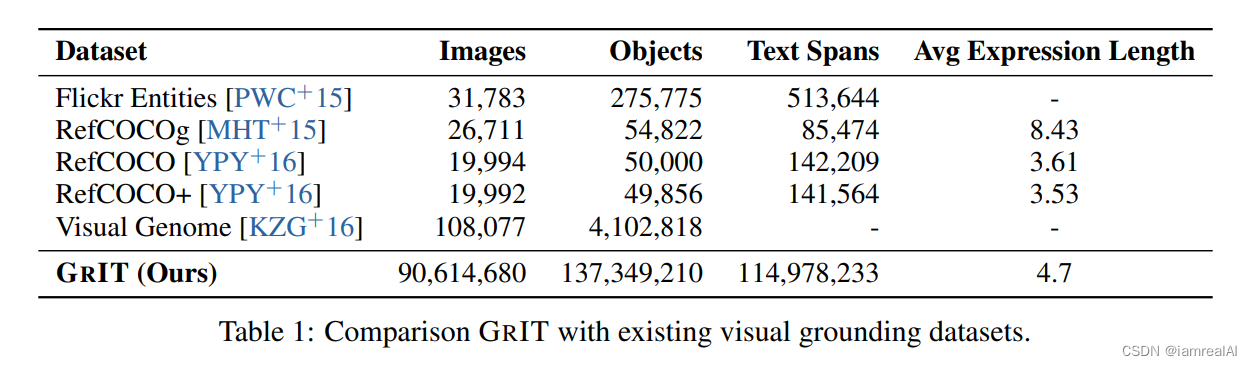
RefCOCO、RefCOCO、RefCOCOg 这三个是从MS-COCO中选取图像得到的数据集,数据集中对所有的 phrase 都有 bbox 的标注。 RefCOCO 共有19,994幅图像,包含142,209个引用表达式,包含50,000个对象实例。RefCOCO 共有19,992幅图像,包含1…...
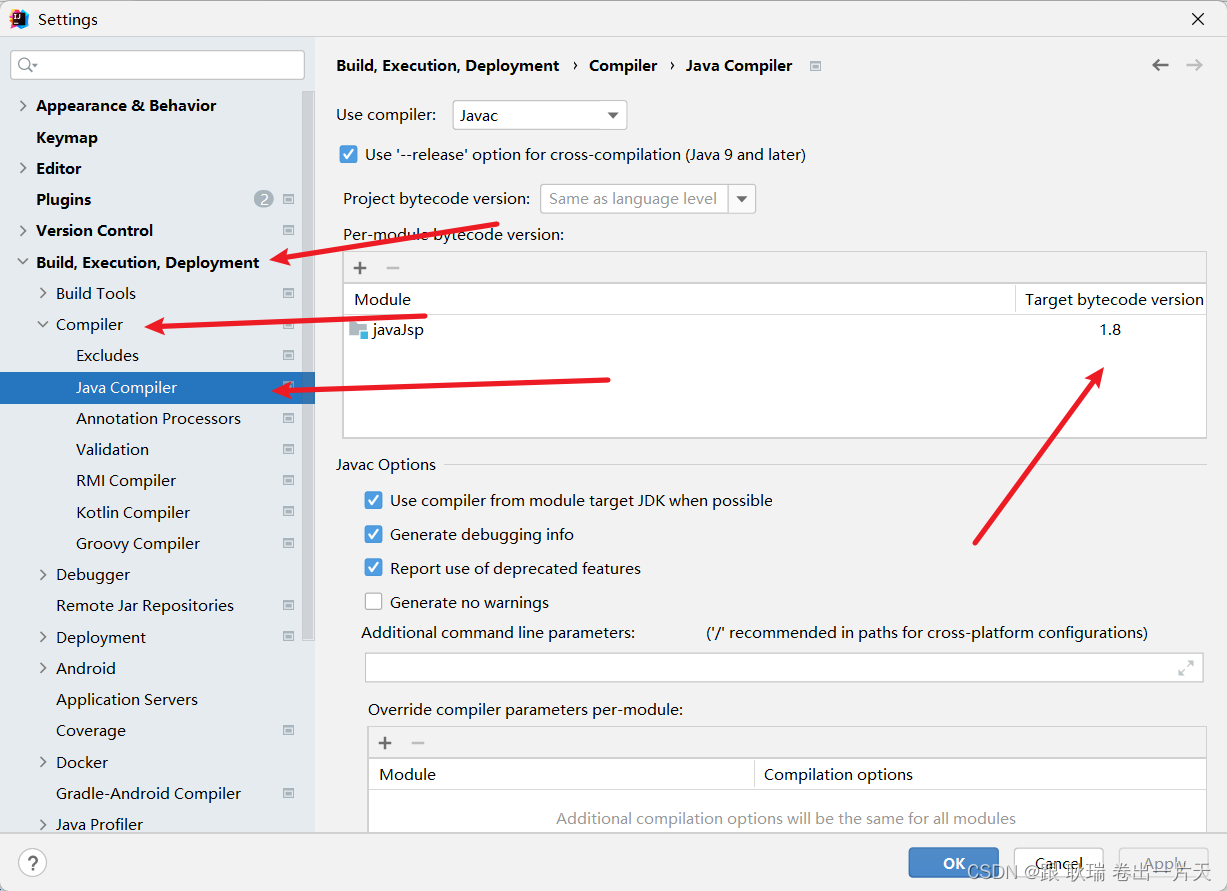
IDEA中更换java项目JDK
我们打开IDEA 打开项目 然后选择 File 下的 Project Structure 这里 我们下拉选择自己需要的JDK Sources这里 也要设置一下JDK对应版本 然后 上面这个 Project 中 也要设置一下对应jdk的版本 保持一直 然后 我们打开 File 下的 Settings 然后 找到如下图配置 如果JKD版本看…...

C++函数
转载知呼大佬06 - C函数 - 知乎 (zhihu.com) 06 - C函数 本期我们讨论的是 C 中的函数。 函数到底是什么呢,函数就是我们写的代码块,被设计用来执行特定的任务,以后我们学习 class 类的时候,这些块会被称为方法,但是…...
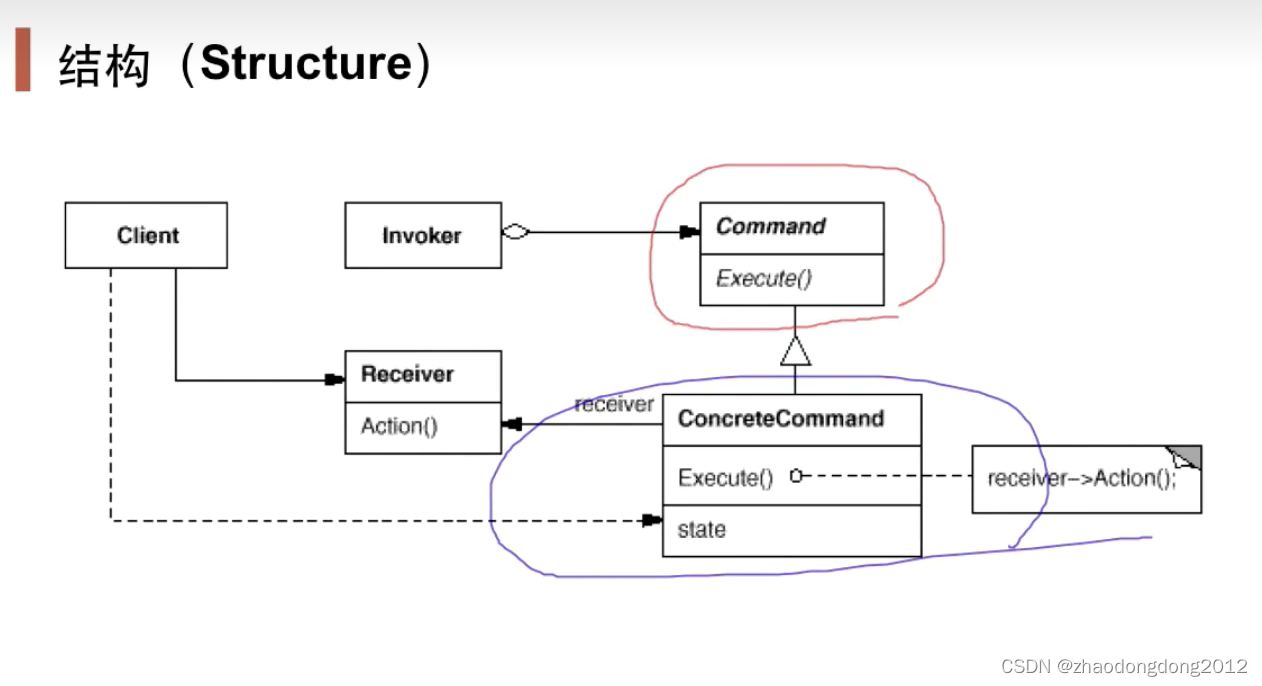
设计模式-命令模式-笔记
“行为变化”模式 在组件的构建过程中,组件行为的变化经常导致组件本身剧烈的变化。“行为变化”模式组件的行为和组件本身进行解耦,从而支持组件行为的变化,实现两者之间的松耦合。 经典模式:Command、Visitor 动机࿰…...

多分辨率融合技术MuRF在视觉任务中的应用与优化
1. 多分辨率融合技术背景与核心挑战视觉基础模型(Vision Foundation Models, VFMs)如DINOv2和SigLIP通过大规模自监督预训练,已成为计算机视觉领域的通用特征提取器。这些模型在训练时通常支持可变输入尺寸,但在实际推理中却普遍采用单一固定分辨率&…...

递归自改进的力量,OMEGA 让算法研发进入“生长模式”
导读:当我们习惯了让 AutoML 帮我们调参、让大模型帮我们写代码时,一个更大胆的问题开始浮现。机器能不能自己“发明”机器学习算法?不仅能写出能跑的代码,还能在标准数据集上打败人类工程师手写的经典模型。OMEGA 正是在回答这个…...

OpenClaw Monitor 3D:基于Three.js的AI智能体实时3D监控平台
1. 项目概述:一个让AI会话“活”起来的3D监控世界 如果你正在使用OpenClaw这类AI智能体框架,那么你一定遇到过这样的困扰:后台跑着几十个会话,你只能通过冰冷的日志文件或者简陋的命令行输出来猜测它们的状态。哪个会话正在“思考…...

CasaOS应用商店深度解析:从Docker Compose原理到社区贡献实战
1. 项目概述与核心价值 如果你正在折腾家庭服务器或者个人云,大概率听说过 CasaOS 这个名字。作为一个开源的、轻量级的家庭云操作系统,它最大的魅力就在于其极简的 Web UI 和“一键安装”应用的理念,让 Docker 容器化部署变得像在手机应用商…...
:它到底解决了什么问题?)
Gemini Thinking 模式(深度思考):它到底解决了什么问题?
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...

gpt-image-2怎么用?一篇讲清楚最实用的使用方法
最近在(c.877ai.cn)库拉这类AI模型聚合平台上第一时间把GPT-Image-2的API接入跑通了,发布两周踩了不少坑。今天从架构原理、核心功能、API接入、实战技巧四个维度,全方位拆解GPT-Image-2的使用方法。无论你是前端开发者、设计师还…...

Rust Trait对象与多态:实现灵活的代码复用
Rust Trait对象与多态:实现灵活的代码复用 引言 大家好,我是一名正在从Rust转向Python的后端开发者。在学习Rust的过程中,Trait系统是我觉得最强大的特性之一。与Python的鸭子类型不同,Rust的Trait提供了一种类型安全的多态实现…...

redis 8.6.3 最新版重磅发布:安全修复、核心 Bug 修复与模块优化全面升级
2026年5月5日,Redis 8.6.3 正式发布。 这是一个非常值得关注的版本,因为官方明确标注了 Update urgency: SECURITY,说明本次更新包含安全修复,建议尽快升级。 从发布内容来看,8.6.3 不只是一次常规的小版本迭代&#x…...

使用 Ollama 本地部署 Qwen3.5-4B 多模态模型
使用 Ollama 本地部署 Qwen3.5-4B 多模态模型 背景 对于大模型初学者来说,本地部署的第一步不一定是直接追求最大、最强的模型,而是先把完整流程跑通。一个比较完整的入门流程通常包括: 下载模型本地运行模型命令行对话API 调用图片输入测试查…...
开源像素光标主题制作指南:从sheep-realms-avatar到全平台个性化方案
1. 项目概述与核心价值如果你和我一样,是个对桌面美学有点“偏执”的创作者或玩家,那你肯定也折腾过鼠标指针。默认的白色箭头看久了实在乏味,而网上那些炫酷的指针包,要么风格不搭,要么安装复杂,要么就是版…...