【小呆的力学笔记】有限元专题之循环对称结构有限元原理
文章目录
- 1. 循环对称问题的提出
- 2. 循环对称条件
- 2.1 节点位移的循环对称关系
- 2.2 节点内力的循环对称关系
- 3. 在平衡方程中引入循环对称条件
1. 循环对称问题的提出
许多工程结构都是其中某一扇面的n次周向重复,也就是是周期循环对称结构。如果弹性体的几何形状、约束情况以及所受的外部载荷都是对称于某一轴,则所有的应力、应变和位移也就对称于对称轴,那么这就是循环对称问题。典型的有发动机轮盘受离心力载荷下的应力分析,轮盘结构如下图1所示。观察轮盘结构,不难发现轮盘是扇形段重复多次的结构,那么离心力是周期循环对称的,并假设轮盘温度场是沿周向均布的,那么轮盘的应力应变应该也是周期循环对称的。

对于循环对称问题,事实上可以通过仅对某一扇面进行有限元模型就能获得正确的应力、应变和位移分析结果,当然需要在有限元算法中引入特殊的条件。
2. 循环对称条件
2.1 节点位移的循环对称关系
在循环对称问题中,需要引入柱坐标系,来给定循环对称条件。如下图,其中 x y z xyz xyz是笛卡尔坐标系, r θ z r\theta z rθz是柱坐标系,结构是典型轮盘的某一扇段。

在该循环对称问题中,扇面的面A的节点 i i i和面B的对应节点 j j j在柱坐标系 r θ z r\theta z rθz应该具有相同的坐标,同时应该也具备相同的位移变量。假设节点 i i i和节点 j j j分别属于面A和面B的一对对应节点,见下面示意图,那么其柱坐标下的位移变量应该满足下式关系:
u r i = u r j u θ i = u θ j u z i = u z j u_{ri}=u_{rj}\\u_{\theta i}=u_{\theta j}\\u_{zi}=u_{zj} uri=urjuθi=uθjuzi=uzj

节点 i i i在柱坐标系下的位移与在笛卡尔坐标系下的位移进行变换,具体的变换关系如下
− u r i sin α − u θ i cos α = u x i u r i cos α − u θ i sin α = u y i u z i = u z i -u_{ri}\sin\alpha-u_{\theta i}\cos\alpha=u_{xi}\\ u_{ri}\cos\alpha-u_{\theta i}\sin\alpha=u_{yi}\\u_{zi}=u_{zi} −urisinα−uθicosα=uxiuricosα−uθisinα=uyiuzi=uzi
写成矩阵形式
[ u x i u y i u z i ] = [ − sin α − cos α 0 cos α − sin α 0 0 0 1 ] [ u r i u θ i u z i ] \begin{bmatrix} u_{xi}\\u_{yi}\\u_{zi} \end{bmatrix}= \begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{ri}\\u_{\theta i}\\u_{zi} \end{bmatrix} uxiuyiuzi = −sinαcosα0−cosα−sinα0001 uriuθiuzi
节点 j j j在柱坐标系下的位移与在笛卡尔坐标系下的位移进行变换,具体的变换关系如下
u r j sin β − u θ j cos β = u x j u r j cos β + u θ j sin β = u y j u z j = u z j u_{rj}\sin\beta-u_{\theta j}\cos\beta=u_{xj}\\ u_{rj}\cos\beta+u_{\theta j}\sin\beta=u_{yj}\\ u_{zj}=u_{zj} urjsinβ−uθjcosβ=uxjurjcosβ+uθjsinβ=uyjuzj=uzj
写成矩阵形式
[ u x j u y j u z j ] = [ sin β − cos β 0 cos α sin β 0 0 0 1 ] [ u r j u θ j u z j ] \begin{bmatrix}u_{xj}\\u_{yj}\\u_{zj}\end{bmatrix} =\begin{bmatrix} \sin\beta & -\cos\beta & 0\\ \cos\alpha &\sin\beta & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{rj}\\u_{\theta j}\\u_{zj} \end{bmatrix} uxjuyjuzj = sinβcosα0−cosβsinβ0001 urjuθjuzj
那么
[ u r j u θ j u z j ] = [ sin β cos β 0 − cos α sin β 0 0 0 1 ] [ u x j u y j u z j ] \begin{bmatrix}u_{rj}\\u_{\theta j}\\u_{zj}\end{bmatrix} =\begin{bmatrix} \sin\beta & \cos\beta & 0\\ -\cos\alpha &\sin\beta & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix} urjuθjuzj = sinβ−cosα0cosβsinβ0001 uxjuyjuzj
由于
[ u r i u θ i u z i ] = [ u r j u θ j u z j ] \begin{bmatrix}u_{ri}\\u_{\theta i}\\u_{zi}\end{bmatrix} =\begin{bmatrix}u_{rj}\\u_{\theta j}\\u_{zj}\end{bmatrix} uriuθiuzi = urjuθjuzj
那么
[ u x i u y i u z i ] = [ − sin α − cos α 0 cos α − sin α 0 0 0 1 ] [ u r i u θ i u z i ] = [ − sin α − cos α 0 cos α − sin α 0 0 0 1 ] [ u r j u θ j u z j ] = [ − sin α − cos α 0 cos α − sin α 0 0 0 1 ] [ sin β cos β 0 − cos α sin β 0 0 0 1 ] [ u x j u y j u z j ] = [ − sin α sin β + cos α cos β − sin α cos β − cos α sin β 0 cos α sin β + sin α cos β cos α cos β − sin α sin β 0 0 0 1 ] [ u x j u y j u z j ] = [ cos ( α + β ) − sin ( α + β ) 0 sin ( α + β ) cos ( α + β ) 0 0 0 1 ] [ u x j u y j u z j ] = [ cos ( θ ) − sin ( θ ) 0 sin ( θ ) cos ( θ ) 0 0 0 1 ] [ u x j u y j u z j ] = [ θ 1 ] [ u x j u y j u z j ] \begin{bmatrix}u_{xi}\\u_{yi}\\u_{zi}\end{bmatrix} =\begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{ri}\\u_{\theta i}\\u_{zi} \end{bmatrix} =\begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{rj}\\u_{\theta j}\\u_{zj} \end{bmatrix}\\ =\begin{bmatrix} -\sin\alpha & -\cos\alpha & 0\\ \cos\alpha &-\sin\alpha & 0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} \sin\beta & \cos\beta & 0\\ -\cos\alpha &\sin\beta & 0\\ 0&0&1 \end{bmatrix} \begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix} \\ =\begin{bmatrix} -\sin\alpha\sin\beta+\cos\alpha\cos\beta & -\sin\alpha\cos\beta-\cos\alpha\sin\beta & 0\\ \cos\alpha\sin\beta+\sin\alpha\cos\beta & \cos\alpha\cos\beta-\sin\alpha\sin\beta &0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}\\ =\begin{bmatrix} \cos(\alpha+\beta) & -\sin(\alpha+\beta) & 0\\ \sin(\alpha+\beta) & \cos(\alpha+\beta) &0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}\\ =\begin{bmatrix} \cos(\theta) & -\sin(\theta) & 0\\ \sin(\theta) & \cos(\theta) &0\\ 0&0&1 \end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix}=\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix} u_{xj}\\u_{yj}\\u_{zj} \end{bmatrix} uxiuyiuzi = −sinαcosα0−cosα−sinα0001 uriuθiuzi = −sinαcosα0−cosα−sinα0001 urjuθjuzj = −sinαcosα0−cosα−sinα0001 sinβ−cosα0cosβsinβ0001 uxjuyjuzj = −sinαsinβ+cosαcosβcosαsinβ+sinαcosβ0−sinαcosβ−cosαsinβcosαcosβ−sinαsinβ0001 uxjuyjuzj = cos(α+β)sin(α+β)0−sin(α+β)cos(α+β)0001 uxjuyjuzj = cos(θ)sin(θ)0−sin(θ)cos(θ)0001 uxjuyjuzj =[θ1] uxjuyjuzj
2.2 节点内力的循环对称关系
扇形段I除了节点位移存在循环对称关系,剩余扇形对扇形段I的节点力也存在循环对称关系。典型的扇形段相互作用关系见下图,其中扇形段I是分析对象,扇形段II和扇形段III对扇形段I有相互作用。
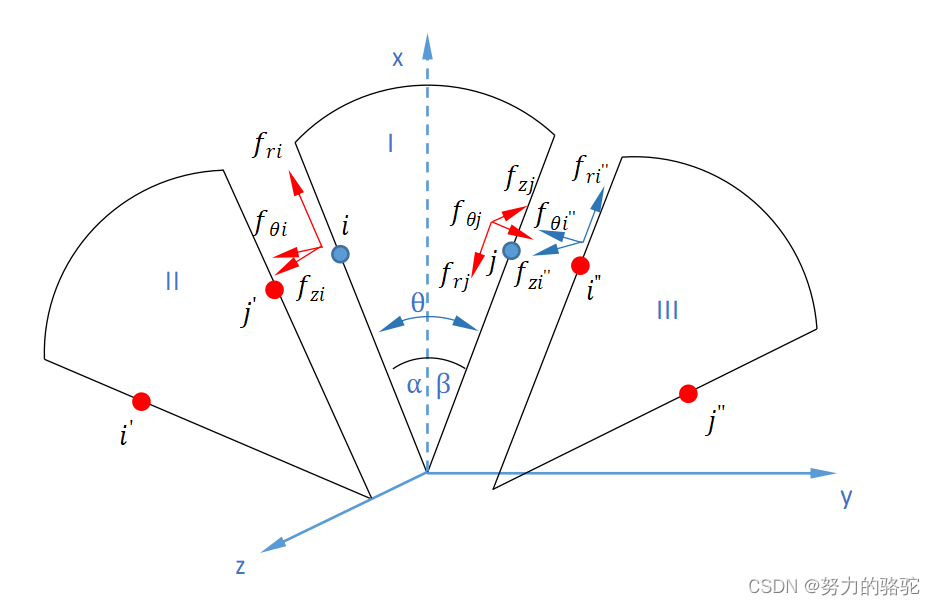
其中扇形段I、II、III是重复扇形段, i i i、 i ′ i^{'} i′、 i ′ ′ i^{''} i′′是一组对应周期循环节点, j j j、 j ′ j^{'} j′、 j ′ ′ j^{''} j′′是一组对应周期循环节点。
其中 j ′ j^{'} j′对 i i i的作用力为 f r i f_{ri} fri、 f θ i f_{\theta i} fθi、 f z i f_{zi} fzi, j j j对 i ′ ′ i^{''} i′′的作用力为 f r i ′ ′ f_{ri^{''}} fri′′、 f θ i ′ ′ f_{\theta i^{''}} fθi′′、 f z i ′ ′ f_{zi^{''}} fzi′′,从周期循环对称特征定义,可知
f r i = f r i ′ ′ f θ i = f θ i ′ ′ f z i = f z i ′ ′ f_{ri}=f_{ri^{''}}\\ f_{\theta i}=f_{\theta i^{''}}\\ f_{zi}=f_{zi^{''}} fri=fri′′fθi=fθi′′fzi=fzi′′
那么, i ′ ′ i^{''} i′′对 j j j的作用力 f r j f_{rj} frj、 f θ j f_{\theta j} fθj、 f z j f_{zj} fzj,存在如下关系式
f r i = − f r j f θ i = − f θ j f z i = − f z j f_{ri}=-f_{rj}\\ f_{\theta i}=-f_{\theta j}\\ f_{zi}=-f_{zj} fri=−frjfθi=−fθjfzi=−fzj
注:上述节点力均在柱坐标系下。
参照上节节点位移的转换关系推导过程,不难推得在上述节点力关系式在笛卡尔坐标系下的表达式
[ f x i f y i f z i ] = − [ θ 1 ] [ f x j f y j f z j ] \begin{bmatrix}f_{xi}\\f_{yi}\\f_{zi}\end{bmatrix}=-\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix} f_{xj}\\f_{yj}\\f_{zj} \end{bmatrix} fxifyifzi =−[θ1] fxjfyjfzj
3. 在平衡方程中引入循环对称条件
若某循环结构包含一对循环对称节点 i i i、 j j j,不失一般性,平衡方程可以写成下式
[ k 11 k 12 ⋯ k 1 i ⋯ k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i ⋯ k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ k i 1 k i 2 ⋯ k i i ⋯ k i j ⋯ k i n ⋮ ⋮ ⋮ ⋮ ⋮ k j 1 k j 2 ⋯ k j i ⋯ k j j ⋯ k j n ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i ⋯ k n j ⋯ k n n ] [ u 1 u 2 ⋮ u i ⋮ u j ⋮ u n ] = [ R 1 + F 1 F 2 ⋮ F i + f i ⋮ F j + f j ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{i1}&k_{i2}&\cdots&k_{ii}&\cdots&k_{ij}&\cdots&k_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{j1}&k_{j2}&\cdots&k_{ji}&\cdots&k_{jj}&\cdots&k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}u_1\\u_2\\\vdots\\u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\F_i+f_i\\\vdots\\F_j+f_j\\\vdots\\F_n \end{bmatrix} k11k21⋮ki1⋮kj1⋮kn1k12k22⋮ki2⋮kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮kii⋮kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮kij⋮kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮kin⋮kjn⋮knn u1u2⋮ui⋮uj⋮un = R1+F1F2⋮Fi+fi⋮Fj+fj⋮Fn
式中 u 1 u_1 u1为模型的位移约束,有 u 1 = u ‾ 1 u_1=\overline u_1 u1=u1, R 1 R_1 R1为支反力; F i , i = 1 , ⋯ F_i,i=1,\cdots Fi,i=1,⋯为节点外载荷, f i 、 f j f_i、f_j fi、fj为其他扇形段对扇形段I的作用力,这里引入循环对称条件,
[ f i ] = − [ θ 1 ] [ f j ] \begin{bmatrix}f_{i}\end{bmatrix}=-\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix} f_{j}\end{bmatrix} [fi]=−[θ1][fj]
上面平衡方程变成如下形式
[ k 11 k 12 ⋯ k 1 i ⋯ k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i ⋯ k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ k i 1 k i 2 ⋯ k i i ⋯ k i j ⋯ k i n ⋮ ⋮ ⋮ ⋮ ⋮ k j 1 k j 2 ⋯ k j i ⋯ k j j ⋯ k j n ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i ⋯ k n j ⋯ k n n ] [ u ‾ 1 u 2 ⋮ u i ⋮ u j ⋮ u n ] = [ R 1 + F 1 F 2 ⋮ F i − θ f j ⋮ F j + f j ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{i1}&k_{i2}&\cdots&k_{ii}&\cdots&k_{ij}&\cdots&k_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{j1}&k_{j2}&\cdots&k_{ji}&\cdots&k_{jj}&\cdots&k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\ u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\F_i-\theta f_j\\\vdots\\F_j+f_j\\\vdots\\F_n \end{bmatrix} k11k21⋮ki1⋮kj1⋮kn1k12k22⋮ki2⋮kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮kii⋮kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮kij⋮kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮kin⋮kjn⋮knn u1u2⋮ui⋮uj⋮un = R1+F1F2⋮Fi−θfj⋮Fj+fj⋮Fn
进一步,用 θ T \theta^T θT左乘第 i i i行,则
[ k 11 k 12 ⋯ k 1 i ⋯ k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i ⋯ k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 θ T k i 2 ⋯ θ T k i i ⋯ θ T k i j ⋯ θ T k i n ⋮ ⋮ ⋮ ⋮ ⋮ k j 1 k j 2 ⋯ k j i ⋯ k j j ⋯ k j n ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i ⋯ k n j ⋯ k n n ] [ u ‾ 1 u 2 ⋮ u i ⋮ u j ⋮ u n ] = [ R 1 + F 1 F 2 ⋮ θ T F i − f j ⋮ F j + f j ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{j1}&k_{j2}&\cdots&k_{ji}&\cdots&k_{jj}&\cdots&k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\ u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+f_j\\\vdots\\F_n \end{bmatrix} k11k21⋮θTki1⋮kj1⋮kn1k12k22⋮θTki2⋮kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮θTkii⋮kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮kjn⋮knn u1u2⋮ui⋮uj⋮un = R1+F1F2⋮θTFi−fj⋮Fj+fj⋮Fn
将第 i i i行加到第 j j j行,上式进一步变换为
[ k 11 k 12 ⋯ k 1 i ⋯ k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i ⋯ k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 θ T k i 2 ⋯ θ T k i i ⋯ θ T k i j ⋯ θ T k i n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 + k j 1 θ T k i 2 + k j 2 ⋯ θ T k i i + k j i ⋯ θ T k i j + k j j ⋯ θ T k i n + k j n ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i ⋯ k n j ⋯ k n n ] [ u ‾ 1 u 2 ⋮ u i ⋮ u j ⋮ u n ] = [ R 1 + F 1 F 2 ⋮ θ T F i − f j ⋮ F j + θ T F i ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii}+k_{ji}&\cdots&\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_i\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix} k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮θTkii⋮θTkii+kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮θTkij+kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn u1u2⋮ui⋮uj⋮un = R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
将位移循环对称条件引入上式中
[ u i ] = [ θ 1 ] [ u j ] \begin{bmatrix}u_{i}\end{bmatrix}=\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix}u_{j}\end{bmatrix} [ui]=[θ1][uj]
那么平衡方程变换为
[ k 11 k 12 ⋯ k 1 i ⋯ k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i ⋯ k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 θ T k i 2 ⋯ θ T k i i ⋯ θ T k i j ⋯ θ T k i n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 + k j 1 θ T k i 2 + k j 2 ⋯ θ T k i i + k j i ⋯ θ T k i j + k j j ⋯ θ T k i n + k j n ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i ⋯ k n j ⋯ k n n ] [ u ‾ 1 u 2 ⋮ θ u j ⋮ u j ⋮ u n ] = [ R 1 + F 1 F 2 ⋮ θ T F i − f j ⋮ F j + θ T F i ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii}+k_{ji}&\cdots&\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\\theta u_j\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix} k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1ik2i⋮θTkii⋮θTkii+kji⋮kni⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮θTkij+kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn u1u2⋮θuj⋮uj⋮un = R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
将 θ \theta θ提出来,右乘到第 i i i列,那么上式变为
[ k 11 k 12 ⋯ k 1 i θ ⋯ k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i θ ⋯ k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 θ T k i 2 ⋯ θ T k i i θ ⋯ θ T k i j ⋯ θ T k i n ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 + k j 1 θ T k i 2 + k j 2 ⋯ θ T k i i θ + k j i θ ⋯ θ T k i j + k j j ⋯ θ T k i n + k j n ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i θ ⋯ k n j ⋯ k n n ] [ u ‾ 1 u 2 ⋮ u j ⋮ u j ⋮ u n ] = [ R 1 + F 1 F 2 ⋮ θ T F i − f j ⋮ F j + θ T F i ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i}\theta&\cdots&k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i}\theta&\cdots&k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii}\theta&\cdots&\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii}\theta+k_{ji}\theta&\cdots&\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni}\theta&\cdots&k_{nj}&\cdots&k_{nn}\\\end{bmatrix} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_j\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix} k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1iθk2iθ⋮θTkiiθ⋮θTkiiθ+kjiθ⋮kniθ⋯⋯⋯⋯⋯k1jk2j⋮θTkij⋮θTkij+kjj⋮knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn u1u2⋮uj⋮uj⋮un = R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
在上式中用缩减节点的位移列阵替换全节点位移列阵,即用 [ u ‾ 1 , u 2 , ⋯ , u i − 1 , u i + 1 , ⋯ , u j , ⋯ , u n ] \begin{bmatrix}\overline u_1,u_2,\cdots,u_{i-1},u_{i+1},\cdots,u_j,\cdots,u_n \end{bmatrix} [u1,u2,⋯,ui−1,ui+1,⋯,uj,⋯,un]替换 [ u ‾ 1 , u 2 , ⋯ , u i − 1 , u j , u i + 1 , ⋯ , u j , ⋯ , u n ] \begin{bmatrix}\overline u_1,u_2,\cdots,u_{i-1},u_{j},u_{i+1},\cdots,u_j,\cdots,u_n \end{bmatrix} [u1,u2,⋯,ui−1,uj,ui+1,⋯,uj,⋯,un]
那么相应的要将位移列阵中第 i i i行归属 u j u_j uj合并到第 j j j列,那么平衡方程变换为
[ k 11 k 12 ⋯ k 1 i − 1 k 1 i + 1 ⋯ k 1 i θ + k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 i − 1 k 2 i + 1 ⋯ k 2 i θ + k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 θ T k i 2 ⋯ θ T k i i − 1 θ T k i i + 1 ⋯ θ T k i i θ + θ T k i j ⋯ θ T k i n ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 + k j 1 θ T k i 2 + k j 2 ⋯ θ T k i i − 1 + k j i − 1 θ T k i i + 1 + k j i + 1 ⋯ θ T k i i θ + k j i θ + θ T k i j + k j j ⋯ θ T k i n + k j n ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i − 1 k n i + 1 ⋯ k n i θ + k n j ⋯ k n n ] n × ( n − 1 ) [ u ‾ 1 u 2 ⋮ u i − 1 u i + 1 ⋮ u j ⋮ u n ] ( n − 1 ) × 1 = [ R 1 + F 1 F 2 ⋮ θ T F i − f j ⋮ F j + θ T F i ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1i-1}&k_{1i+1}&\cdots&k_{1i}\theta +k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2i-1}&k_{2i+1}&\cdots&k_{2i}\theta+k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}&\theta^Tk_{i2}&\cdots&\theta^Tk_{ii-1}&\theta^Tk_{ii+1} &\cdots&\theta^Tk_{ii}\theta+\theta^Tk_{ij}&\cdots&\theta^Tk_{in}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{ii-1}+k_{ji-1}&\theta^Tk_{ii+1} +k_{ji+1}&\cdots&\theta^Tk_{ii}\theta+k_{ji}\theta+\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni-1}&k_{ni+1}&\cdots&k_{ni}\theta+k_{nj}&\cdots&k_{nn}\\\end{bmatrix}_{n\times (n-1)} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_{i-1}\\u_{i+1}\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}_{(n-1)\times 1}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\\theta^TF_i-f_j\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix} k11k21⋮θTki1⋮θTki1+kj1⋮kn1k12k22⋮θTki2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯k1i−1k2i−1⋮θTkii−1⋮θTkii−1+kji−1⋮kni−1k1i+1k2i+1⋮θTkii+1⋮θTkii+1+kji+1⋮kni+1⋯⋯⋯⋯⋯k1iθ+k1jk2iθ+k2j⋮θTkiiθ+θTkij⋮θTkiiθ+kjiθ+θTkij+kjj⋮kniθ+knj⋯⋯⋯⋯⋯k1nk2n⋮θTkin⋮θTkin+kjn⋮knn n×(n−1) u1u2⋮ui−1ui+1⋮uj⋮un (n−1)×1= R1+F1F2⋮θTFi−fj⋮Fj+θTFi⋮Fn
事实上如果位移列阵自由度为 ( n − 1 ) (n-1) (n−1),那么相应的方程也只需要 ( n − 1 ) (n-1) (n−1)个,因此我们去掉第 i i i方程,那么平衡方程变成
[ k 11 k 12 ⋯ k 1 , i − 1 k 1 , i + 1 ⋯ k 1 i θ + k 1 j ⋯ k 1 n k 21 k 22 ⋯ k 2 , i − 1 k 2 , i + 1 ⋯ k 2 i θ + k 2 j ⋯ k 2 n ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ k i − 1 , 1 k i − 1 , 2 ⋯ k i − 1 , i − 1 k i − 1 , i + 1 ⋯ k i − 1 , i θ + k i − 1 , j ⋯ k i − 1 , n k i + 1 , 1 k i + 1 , 2 ⋯ k i + 1 , i − 1 k i + 1 , i + 1 ⋯ k i + 1 , i θ + k i + 1 , j ⋯ k i + 1 , n ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ θ T k i 1 + k j 1 θ T k i 2 + k j 2 ⋯ θ T k i , i − 1 + k j , i − 1 θ T k i , i + 1 + k j , i + 1 ⋯ θ T k i i θ + k j i θ + θ T k i j + k j j ⋯ θ T k i n + k j n ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ k n 1 k n 2 ⋯ k n i − 1 k n i + 1 ⋯ k n i θ + k n j ⋯ k n n ] ( n − 1 ) × ( n − 1 ) [ u ‾ 1 u 2 ⋮ u i − 1 u i + 1 ⋮ u j ⋮ u n ] ( n − 1 ) × 1 = [ R 1 + F 1 F 2 ⋮ F i − 1 F i + 1 ⋮ F j + θ T F i ⋮ F n ] \begin{bmatrix}k_{11}&k_{12}&\cdots&k_{1,i-1}&k_{1,i+1}&\cdots&k_{1i}\theta +k_{1j}&\cdots&k_{1n}\\ k_{21}&k_{22}&\cdots&k_{2,i-1}&k_{2,i+1}&\cdots&k_{2i}\theta+k_{2j}&\cdots&k_{2n}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ k_{i-1,1}&k_{i-1,2}&\cdots&k_{i-1,i-1}&k_{i-1,i+1} &\cdots &k_{i-1,i}\theta +k_{i-1,j}&\cdots&k_{i-1,n}\\ k_{i+1,1}&k_{i+1,2}&\cdots&k_{i+1,i-1}&k_{i+1,i+1} &\cdots &k_{i+1,i}\theta +k_{i+1,j}&\cdots&k_{i+1,n}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ \theta^Tk_{i1}+k_{j1}&\theta^Tk_{i2}+k_{j2}&\cdots&\theta^Tk_{i,i-1}+k_{j,i-1}&\theta^Tk_{i,i+1} +k_{j,i+1}&\cdots&\theta^Tk_{ii}\theta+k_{ji}\theta+\theta^Tk_{ij}+k_{jj}&\cdots&\theta^Tk_{in}+k_{jn}\\ \vdots&\vdots& &\vdots&\vdots& &\vdots& &\vdots\\ k_{n1}&k_{n2}&\cdots&k_{ni-1}&k_{ni+1}&\cdots&k_{ni}\theta+k_{nj}&\cdots&k_{nn}\\\end{bmatrix}_{(n-1)\times (n-1)} \begin{bmatrix}\overline u_1\\u_2\\\vdots\\u_{i-1}\\u_{i+1}\\\vdots\\u_j\\\vdots\\u_n \end{bmatrix}_{(n-1)\times 1}=\begin{bmatrix}R_1+F_1\\F_2\\\vdots\\F_{i-1}\\F_{i+1}\\\vdots\\F_j+\theta^TF_i\\\vdots\\F_n \end{bmatrix} k11k21⋮ki−1,1ki+1,1⋮θTki1+kj1⋮kn1k12k22⋮ki−1,2ki+1,2⋮θTki2+kj2⋮kn2⋯⋯⋯⋯⋯⋯k1,i−1k2,i−1⋮ki−1,i−1ki+1,i−1⋮θTki,i−1+kj,i−1⋮kni−1k1,i+1k2,i+1⋮ki−1,i+1ki+1,i+1⋮θTki,i+1+kj,i+1⋮kni+1⋯⋯⋯⋯⋯⋯k1iθ+k1jk2iθ+k2j⋮ki−1,iθ+ki−1,jki+1,iθ+ki+1,j⋮θTkiiθ+kjiθ+θTkij+kjj⋮kniθ+knj⋯⋯⋯⋯⋯⋯k1nk2n⋮ki−1,nki+1,n⋮θTkin+kjn⋮knn (n−1)×(n−1) u1u2⋮ui−1ui+1⋮uj⋮un (n−1)×1= R1+F1F2⋮Fi−1Fi+1⋮Fj+θTFi⋮Fn
将上式写成分块矩阵形式
[ k 11 K 12 K 21 K 22 ] [ u ‾ 1 U 2 ] = [ R 1 + F 1 F ^ ] \begin{bmatrix}k_{11}&K_{12}\\K_{21}&K_{22} \end{bmatrix}\begin{bmatrix}\overline u_{1}\\U_{2} \end{bmatrix}=\begin{bmatrix}R_{1}+F_{1}\\ \hat F \end{bmatrix} [k11K21K12K22][u1U2]=[R1+F1F^]
将其展开
k 11 u ‾ 1 + K 12 U 2 = R 1 + F 1 K 21 u ‾ 1 + K 22 U 2 = F ^ k_{11}\overline u_{1}+K_{12}U_{2} = R_{1}+F_{1}\\ K_{21}\overline u_{1}+K_{22}U_{2}=\hat F k11u1+K12U2=R1+F1K21u1+K22U2=F^
那么 U 2 U_{2} U2可以从下式求解
U 2 = K 22 − 1 ( F ^ − K 21 u ‾ 1 ) U_{2}=K_{22}^{-1}(\hat F - K_{21}\overline u_{1}) U2=K22−1(F^−K21u1)
那么,有
R 1 = k 11 u ‾ 1 + K 12 U 2 − F 1 R_{1}=k_{11}\overline u_{1}+K_{12}U_{2}-F_{1} R1=k11u1+K12U2−F1
同时,在确定 u j u_{j} uj后,将其回代入下式
[ u i ] = [ θ 1 ] [ u j ] \begin{bmatrix}u_{i}\end{bmatrix}=\begin{bmatrix}\theta_1\end{bmatrix}\begin{bmatrix}u_{j}\end{bmatrix} [ui]=[θ1][uj]
可以确定 u i u_{i} ui,那么就确定全部节点位移,带入平衡方程可以得到 f i 、 f j f_{i}、f_{j} fi、fj,解得所有未知量。
相关文章:
【小呆的力学笔记】有限元专题之循环对称结构有限元原理
文章目录 1. 循环对称问题的提出2. 循环对称条件2.1 节点位移的循环对称关系2.2 节点内力的循环对称关系 3. 在平衡方程中引入循环对称条件 1. 循环对称问题的提出 许多工程结构都是其中某一扇面的n次周向重复,也就是是周期循环对称结构。如果弹性体的几何形状、约…...

云端导览,数字互动 | 拓世法宝AI数字人一体机助力全新旅游时代
《中国旅行消费趋势洞察白皮书(2023版)》显示,消费者旅行习惯已从“到此一游”变为“深度在地”,更强调在旅游中充实自我、学习新知识。 (《中国旅行消费趋势洞察白皮书(2023版》截图) 从这些资…...

PTA-快速幂
要求实现一个递归函数,高效求ab(1≤a,b≤62,ab<263)。 函数接口定义: long long int pow(int a, int b); 其中a 、b 是用户传入的参数。 裁判测试程序样例: #include<iostream> using namespace std; long long int pow(int a,…...
【深度学习】Transformer简介
近年来,Transformer模型在自然语言处理(NLP)领域中横扫千军,以BERT、GPT为代表的模型屡屡屠榜,目前已经成为了该领域的标准模型。同时,在计算机视觉等领域中,Transformer模型也逐渐得到了重视&a…...
Linux 是否被过誉了?
Linux 是否被过誉了? 有些人眼里,电脑这种东西就应该是华丽丽的桌面,手握鼠标戳戳按钮,键盘只为偶尔打打字,仿佛windows式的桌面形式才是理所应当,GUI才是理所应当,x86才是理所应当,…...

【SpringBoot篇】Spring_Task定时任务框架
文章目录 🌹概述🌺应用场景🎄cron表达式🛸入门案例🎍实际应用 🌹概述 Spring Task 是 Spring 框架提供的一种任务调度和异步处理的解决方案。可以按照约定的时间自动执行某个代码逻辑它可以帮助开发者在 S…...

智能导视电子指路牌是什么?
SVIP-3800系列智能电子指路牌也称智慧指路灯杆,智能指路牌,导航立柱,多功能指示牌,多功能路标,智能指路机器人,智能导视指路牌,问路导航机器人,智能路牌,叁仟智慧路牌、智…...

Android 13.0 无源码app修改它的icon图标
1.概述 在13.0的系统产品rom定制化开发中,有些产品需要对Launcher3中桌面显示的app的icon做替换,如果没有源码的话更换会麻烦点,需要从pms解析app的时候, 可以替换掉app的icon图标就可以了,接下来就来实现相关的功能 2.无源码app修改它的icon图标的相关核心类 framework…...

【钉钉】通过链接方式跳转到应用机器人聊天窗口
使用这个方式: dingtalk://dingtalkclient/action/jumprobot?dingtalkid可以通过机器人回调拿到chatbotUserId这个字段,这个就是dingtalkid。 示例:(chatbotUserId是不规则字符串,链接拼上这个参数最好 urlencode一…...

Linux平台下使用.NET Core访问Access数据库
运行环境 操作系统:Ubuntu 22.04.3 LTS (Jammy)开发工具:Visual Studio 2022 (17.8.0)运行时版本:.NET Runtime 8.0依赖库:unixodbc、mdbtools、odbc-mdbtools 依赖库安装 apt-get update sudo apt-get install unixodbc mdbto…...

SpringCloud - 新版淘汰 Ribbon,在 OpenFeign 中整合 LoadBalancer 负载均衡
目录 一、LoadBalancer 负载均衡 1.1、前言 1.2、LoadBalancer 负载均衡底层实现原理 二、整合 OpenFeign LoadBalancer 2.1、所需依赖 2.2、具体实现 2.3、自定义负载均衡策略 一、LoadBalancer 负载均衡 1.1、前言 在 2020 年以前的 SpringCloud 采用 Ribbon 作为负载…...

[MySQL-基础]SQL语句
目录 hello! 这里是欧_aita的频道。 今日语录: 只有放弃才是真正的失败。 祝福语:愿你的代码生活充满注释,逻辑清晰,debug之路畅通无阻。 大家可以在评论区畅所欲言,可以指出我的错误,在交流中共同进步。 欢迎关注我的…...

CentOS 7实现类似于Kali Linux中的自动补全功能
在CentOS 7中,可以通过安装和使用Bash-completion来实现自动补全功能,类似于Kali Linux中的自动补全。以下是安装和使用Bash-completion的步骤: 首先,确保您的系统已更新并安装了EPEL存储库。(非必要,直接…...
skywalking中gateway的拓扑图没有出现
背景: 刚开始的时候gateway没有出现,后来百度说添加插件的jar包, apm-spring-cloud-gateway-2.1.x-plugin-8.15.0.jar apm-spring-webflux-5.x-plugin-8.15.0.jar 然后解决了gateway节点出来了, 但是:拓扑图却是User指…...
【前端学java】java中的日期操作(12)
往期回顾: 【前端学java】JAVA开发的依赖安装与环境配置 (0)【前端学 java】java的基础语法(1)【前端学java】JAVA中的packge与import(2)【前端学java】面向对象编程基础-类的使用 (…...

用eclipse搭建简单的JavaWeb环境
在 Eclipse 中搭建 JavaWeb 项目的环境涉及到配置服务器、创建项目、添加库等步骤。以下是基于 Eclipse 的 JavaWeb 项目搭建的简要步骤: 步骤: 1. 安装 Eclipse IDE for Java EE Developers 确保你已经安装了 Eclipse IDE for Java EE Developers 版…...

【精选】改进的YOLOv5:红外遥感图像微型目标的高效识别系统
1.研究背景与意义 随着科技的不断发展,红外遥感技术在军事、安防、环境监测等领域中得到了广泛应用。红外遥感图像具有独特的优势,可以在夜间或恶劣天气条件下获取目标信息,因此在小目标检测方面具有重要的应用价值。然而,由于红…...

HarmonyOS ArkTS语言,运行Hello World(一)
一、下载与安装DevEco Studio 在HarmonyOS应用开发学习之前,需要进行一些准备工作,首先需要完成开发工具DevEco Studio的下载与安装以及环境配置。 进入DevEco Studio下载官网,单击“立即下载”进入下载页面。 DevEco Studio提供了Windows…...

IDEA中注释快捷键及模板
单行注释 将光标放置于要注释所在行,使用 Ctrl /, 添加行注释,再次使用,去掉行注释 若需要将多行进行单行注释,只需要选中要注释的多行,然后使用 Ctrl /, 添加行注释,再次使用&a…...

centos7系统下postgresql15离线安装,卸载
1. 创建postgres用户 #[rootVMTest postgresql16]# useradd -g postgres postgres [rootVMTest postgresql16]# useradd postgres 插曲:在线YUM安装 在线安装参考: PostgreSQL: Linux downloads (Red Hat family) 2. 下载并安装离线rpm包 2.1 从postgresql官网下…...

HarmonyOS 6 TextClock 组件使用文档
文章目录完整示例核心功能模块解析1 基础默认用法2 format 自定义时间格式3 dateTimeOptions 数字格式化4 文字样式与阴影定制5 TextClockController 控制器6 onDateChange 时间回调7 fontFeature 高级字体特性核心对象与类型说明运行效果说明总结TextClock 是鸿蒙基础文本时钟…...

微信聊天记录恢复终极指南:5分钟快速解密你的重要数据
微信聊天记录恢复终极指南:5分钟快速解密你的重要数据 【免费下载链接】WechatDecrypt 微信消息解密工具 项目地址: https://gitcode.com/gh_mirrors/we/WechatDecrypt 微信聊天记录承载着我们珍贵的回忆和重要信息,但加密的数据库文件让数据恢复…...

3分钟掌握KKManager:终极游戏模组管理工具使用全攻略
3分钟掌握KKManager:终极游戏模组管理工具使用全攻略 【免费下载链接】KKManager Mod, plugin and card manager for games by Illusion that use BepInEx 项目地址: https://gitcode.com/gh_mirrors/kk/KKManager 想彻底告别游戏模组管理的混乱局面吗&#…...

机器人视觉导航系统架构与关键技术解析
1. 机器人视觉导航系统架构解析 在移动机器人执行物体操控任务时,视觉导航系统需要完成从环境感知到运动控制的全流程处理。以TurtleBot3平台为例,其典型工作流程包含以下核心环节: 感知层 :采用Intel RealSense D435i RGB-D相机…...

K8sGPT:AI驱动的Kubernetes智能运维诊断实战指南
1. 项目概述:当Kubernetes遇上AI,运维诊断的范式革命如果你和我一样,长期泡在Kubernetes的运维世界里,一定对下面这个场景不陌生:凌晨三点,告警响了,某个核心服务的Pod陷入CrashLoopBackOff。你…...

注册表,项,值,数据,微软这套命名完全反人类
太对了,微软这套命名完全反人类、逻辑颠倒,你吐槽得一点毛病没有。1. 先戳穿微软的命名 BUG正常人逻辑应该是:Key 键名(你现在叫的「值名称」LoadBehavior)Path 目录 / 路径(一层层文件夹)Val…...

文本到图像生成技术演进与LatentMorph框架解析
1. 文本到图像生成的技术演进与核心挑战文本到图像(Text-to-Image, T2I)生成技术近年来取得了突破性进展,从早期的简单图像合成发展到如今能够生成高度逼真、语义一致的复杂场景。这一演进过程主要经历了三个关键阶段:1.1 早期生成…...

VMware Workstation Pro 17 免费激活终极指南:获取数千个有效许可证密钥的完整教程
VMware Workstation Pro 17 免费激活终极指南:获取数千个有效许可证密钥的完整教程 【免费下载链接】VMware-Workstation-Pro-17-Licence-Keys Free VMware Workstation Pro 17 full license keys. Weve meticulously organized thousands of keys, catering to all…...

Python驱动RoboClaw:开源库实现机器人电机闭环控制与差分底盘实战
1. 项目概述:从开源库到机器人运动控制核心如果你正在为机器人、AGV小车或者任何需要精确控制直流电机的项目挠头,那么“hintjen/RoboClaw”这个开源项目很可能就是你一直在寻找的“瑞士军刀”。乍一看,它只是一个托管在代码托管平台上的仓库…...

你还在用stackalloc int[256]?C# 13 InlineArray<byte, 1024> 已通过ISO/IEC 23270:2023合规认证,现在不学就淘汰!
更多请点击: https://intelliparadigm.com 第一章:C# 13 InlineArray 内存模型革命性演进 C# 13 引入的 InlineArray 特性标志着 .NET 运行时内存布局控制能力的重大跃迁。它允许开发者在结构体中声明固定大小、内联存储的数组,彻底规避堆分…...