使用VC++设计程序:实现常见的三种图像插值算法:最近邻插值,双线性插值,立方卷积插值
图像放大的三种插值算法
获取源工程可访问gitee可在此工程的基础上进行学习。
该工程的其他文章:
01- 一元熵值、二维熵值
02- 图像平移变换,图像缩放、图像裁剪、图像对角线镜像以及图像的旋转
03-邻域平均平滑算法、中值滤波算法、K近邻均值滤波器
04-分段线性变换,直方图均衡化、锐化处理
05-基于拉普拉斯算子、Canny的边缘检测功能、实现Otsu分割方法
文章目录
- 图像放大的三种插值算法
- 实验内容
- 一、 插值算法的原理
- 1. 最近邻插值
- 2. 双线性插值
- 3. 立方卷积插值
- 二、 实验代码与现象图
- 1. 最近邻插值
- 2. 双线性插值
- 3.立方卷积插值
实验内容
B–(3)研究放大图像时使用的插值算法,使用VC++实现常见的三种图像插值算法:最近邻插值,双线性插值,立方卷积插值。通过实验验证其效果。
一、 插值算法的原理
1. 最近邻插值
最近邻插值是一种简单的插值方法,它选择离目标位置最近的已知像素值。对于二维图像上的插值,最近邻插值的公式为:
I new ( x , y ) = I old ( round ( x ) , round ( y ) ) I_{\text{new}}(x, y) = I_{\text{old}}\left(\text{round}(x), \text{round}(y)\right) Inew(x,y)=Iold(round(x),round(y))
其中:
- $ I_{\text{new}}(x, y) $ 是目标位置的新像素值。
- $ I_{\text{old}}(x’, y’) $是原始图像中最近邻的已知像素值,其中 $ (x’, y’) $ 由 $ (x, y) $ 四舍五入得到。
2. 双线性插值
双线性插值考虑了目标位置周围的四个最近的已知像素值,并根据其相对位置进行加权平均。对于二维图像上的插值,双线性插值的公式为:
I new ( x , y ) = ( 1 − α ) ( 1 − β ) I old ( x 1 , y 1 ) + α ( 1 − β ) I old ( x 2 , y 1 ) + ( 1 − α ) β I old ( x 1 , y 2 ) + α β I old ( x 2 , y 2 ) I_{\text{new}}(x, y) = (1 - \alpha)(1 - \beta)I_{\text{old}}(x_1, y_1) + \alpha(1 - \beta)I_{\text{old}}(x_2, y_1) + (1 - \alpha)\beta I_{\text{old}}(x_1, y_2) + \alpha \beta I_{\text{old}}(x_2, y_2) Inew(x,y)=(1−α)(1−β)Iold(x1,y1)+α(1−β)Iold(x2,y1)+(1−α)βIold(x1,y2)+αβIold(x2,y2)
其中:
- $ I_{\text{new}}(x, y) $ 是目标位置的新像素值。
- $ I_{\text{old}}(x_i, y_i)$是原始图像中四个最近邻的已知像素值,其中 $ (x_i, y_i) $ 是目标位置的四个相邻像素的坐标。
- $ \alpha = x - x_1 $ 和 $ \beta = y - y_1$。
双线性插值算法涉及到目标位置周围的四个最近邻的已知像素值。这四个最近邻的像素可以通过目标位置坐标的整数部分和小数部分来确定。假设目标位置的坐标为 ((x, y)),则这四个最近邻的坐标可以表示为 ((x_1, y_1), (x_2, y_1), (x_1, y_2), (x_2, y_2)),其中:
- x 1 = ⌊ x ⌋ x_1 = \lfloor x \rfloor x1=⌊x⌋ 是 x x x的整数部分;
- x 2 = ⌈ x ⌉ x_2 = \lceil x \rceil x2=⌈x⌉ 是 x x x的整数部分加一;
- y 1 = ⌊ y ⌋ y_1 = \lfloor y \rfloor y1=⌊y⌋ 是 y y y 的整数部分;
- y 2 = ⌈ y ⌉ y_2 = \lceil y \rceil y2=⌈y⌉ 是 y y y 的整数部分加一。
这四个最近邻的坐标形成了一个矩形区域,如下图所示:
(x1, y1) ---------- (x2, y1)| || || |
(x1, y2) ---------- (x2, y2)
3. 立方卷积插值
立方卷积插值考虑了目标位置周围的八个最近的已知像素值,并使用立方卷积核进行加权平均。对于二维图像上的插值,立方卷积插值的公式较为复杂,其中涉及到立方卷积核的权重计算。
I new ( x , y ) = ∑ i = − 1 2 ∑ j = − 1 2 w ( i , j ) I old ( x + i , y + j ) I_{\text{new}}(x, y) = \sum_{i = -1}^{2} \sum_{j = -1}^{2} w(i, j)I_{\text{old}}(x + i, y + j) Inew(x,y)=i=−1∑2j=−1∑2w(i,j)Iold(x+i,y+j)
其中:
- $ I_{\text{new}}(x, y) $ 是目标位置的新像素值。
- $I_{\text{old}}(x + i, y + j) $ 是原始图像中八个最近邻的已知像素值,其中 $i $ 和 $j $取值为 -1, 0, 1, 2。
- $ w(i, j) $ 是立方卷积核的权重,通常采用一些特定的卷积核形式,如 Bicubic 插值。
在立方卷积插值中,涉及到的是8个点。以下是正确的描述:
对于立方卷积插值,考虑目标位置 ( x , y ) (x, y) (x,y) 周围的8个最近邻点,其坐标可以表示为 ( x i , y j ) (x_i, y_j) (xi,yj),其中:
x i = x − 1 , 0 , 1 , 2 x_i = x - 1, 0, 1, 2 xi=x−1,0,1,2
y j = y − 1 , 0 , 1 , 2 y_j = y - 1, 0, 1, 2 yj=y−1,0,1,2
这样,可以得到一个包含8个点的矩阵,如下所示:
(x-1, y-1) | (x, y-1) | (x+1, y-1) | (x+2, y-1)
(x-1, y) | (x, y) | (x+1, y) | (x+2, y)
(x-1, y+1) | (x, y+1) | (x+1, y+1) | (x+2, y+1)
(x-1, y+2) | (x, y+2) | (x+1, y+2) | (x+2, y+2)
这里的坐标形成了一个4x4的矩阵,但在立方卷积插值中,只需要考虑中间的8个点。这8个点的坐标将用于计算插值权重。
二、 实验代码与现象图
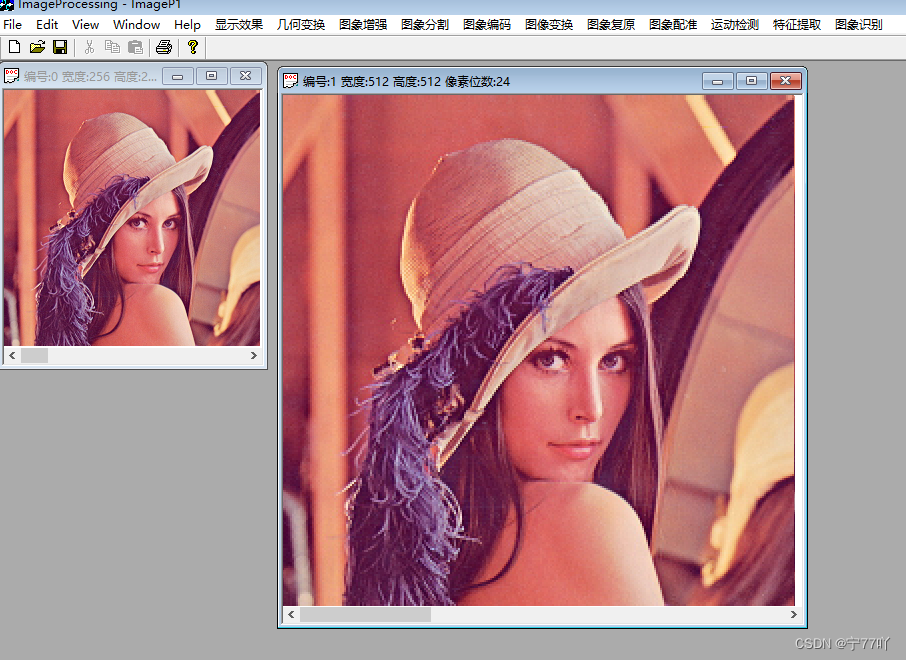
1. 最近邻插值
void CImageProcessingView::OnGeoResizing()
{// 实验 图像缩放//MessageBox("请在这里添加图像缩放的代码");// 获得当前文档对象
CImageProcessingDoc* pDoc = GetDocument();// 判断图像是否已被加载if( pDoc->m_pDibInit->IsEmpty() ){MessageBox("图像未加载");return;}int width = pDoc->m_pDibInit->GetWidth();int height = pDoc->m_pDibInit->GetHeight();int bitCount = pDoc->m_pDibInit->GetBitCount();// 将 m_pDibInit 拷贝至 m_pDibTestpDoc->m_pDibTest->CloneDib(pDoc->m_pDibInit);// 考虑将图像放大两倍的情况 float nResizing = 2;// 获得新的图像高度int newWidth = width*nResizing;int newHeight = height*nResizing;pDoc->m_pDibTest->SetWidthHeight(newWidth, newHeight);//*****************************图像的插值1最近邻插值算法************//int i=0;int j=0;float src_x, src_y;RGBQUAD Quad1;for(i=0;i<newWidth;i++)for(j=0;j<newHeight;j++){src_x = (i / nResizing) + 0.5; //四舍五入src_y = (j / nResizing) + 0.5;Quad1=pDoc->m_pDibInit->GetPixelColor(src_x,src_y);pDoc->m_pDibTest->SetPixelColor(i,j,&Quad1);}// 交换 m_pDibInit 与 m_pDibTest 指针CDib* pTmp = pDoc->m_pDibInit;pDoc->m_pDibInit = pDoc->m_pDibTest;pDoc->m_pDibTest = pTmp; // 设置脏标记pDoc->SetModifiedFlag(TRUE);// 更新视图pDoc->UpdateAllViews(NULL);
}实验现象.
图像放大2倍
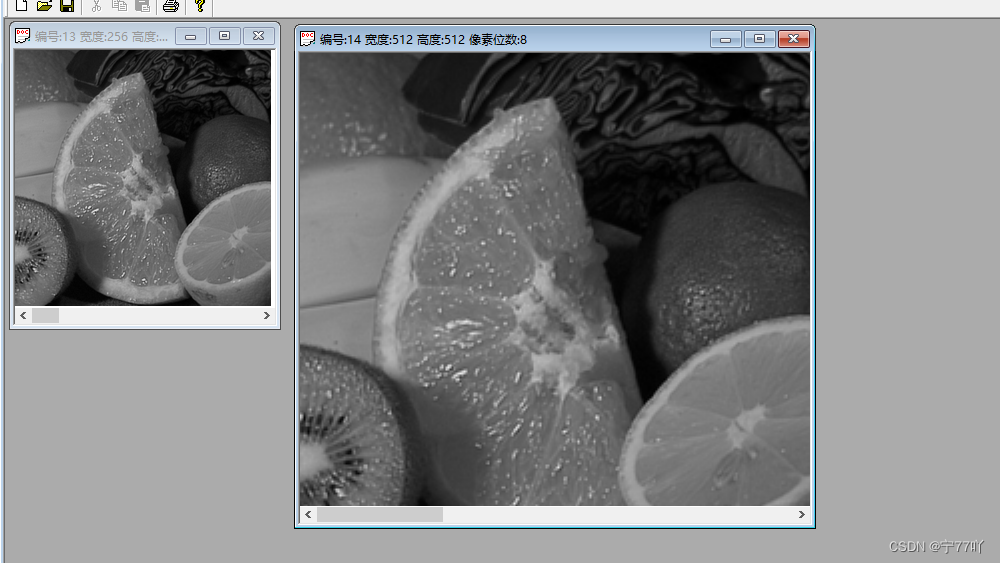
2. 双线性插值
int i=0;int j=0;for(i=0;i<newWidth;i++)for(j=0;j<newHeight;j++){int x=i/nResizing, y = j / nResizing; //定位,找周围四个点float u = i / nResizing,v = j / nResizing; //注意这个类型u =u - x; //所占权重系数v =v - y;int gray0 , gray1 , gray2 , gray3 , GRAY ;gray0 = pDoc->m_pDibInit->GetPixelGray(x, y);//边界处理 非补零if (x + 1 < 256)gray1 = pDoc->m_pDibInit->GetPixelGray(x+1, y);elsegray1 = pDoc->m_pDibInit->GetPixelGray(x, y);if (y + 1 < 256)gray2 = pDoc->m_pDibInit->GetPixelGray(x, y + 1);elsegray2 = pDoc->m_pDibInit->GetPixelGray(x, y);if (x + 1 < 256 && y + 1 < 256)gray3 = pDoc->m_pDibInit->GetPixelGray(x + 1, y + 1);elsegray3 = pDoc->m_pDibInit->GetPixelGray(x, y);GRAY = (1 - u) * (1 - v) * gray0 + (1 - u) * v * gray2 + u * (1 - v) * gray1 + u * v * gray3;pDoc->m_pDibTest->SetPixelGray(i, j, GRAY);}// 交换 m_pDibInit 与 m_pDibTest 指针CDib* pTmp = pDoc->m_pDibInit;pDoc->m_pDibInit = pDoc->m_pDibTest;pDoc->m_pDibTest = pTmp;
实验效果图.
3.立方卷积插值
int a = -0.5; //系数for(int i=0;i<newWidth;i++)for (int j = 0; j < newHeight; j++){int x[4] = { 0 }, y[4] = { 0 };x[1] = i / nResizing, y[1] = j / nResizing; //找点,(1,1)位置x[0] = x[1] - 1; y[0] = y[1] - 1;x[2] = x[1] + 1; y[2] = y[1] + 1;x[3] = x[1] + 2; y[3] = y[1] + 2;float u = (i) / nResizing, v = (j) / nResizing;u =u - x[1]; //所占权重系数(大于0小于1)v =v - y[1];int gray[4][4] = { 0 };float w_x[4] = { 0 }, w_y[4] = { 0 };w_x[0] = 1 + u; w_x[1] = u; w_x[2] = 1 - u; w_x[3] = 2 - u;w_y[0] = 1 + v; w_y[1] = v; w_y[2] = 1 - v; w_y[3] = 2 - v;float W_x[4] = { 0 }, W_y[4] = { 0 };for (int k = 0; k < 4; k++) //计算x和y的权重{if (w_x[k] <= 1 && w_x[k] >= -1)W_x[k] = (a + 2) * pow(w_x[k], 3) - (a + 3) * pow(w_x[k], 2) + 1;else if (w_x[k] > 1 && w_x[k] < 2) W_x[k] = a * pow(w_x[k], 3) - 5 * a * pow(w_x[k], 2) + 8 * a * w_x[k] - 4 * a;elseW_x[k] = 0;if (w_y[k] <= 1 && w_y[k] >= -1)W_y[k] = (a + 2) * pow(w_y[k], 3) - (a + 3) * pow(w_y[k], 2) + 1;else if (w_y[k] > 1 && w_y[k] < 2)W_y[k] = a * pow(w_y[k], 3) - 5 * a * pow(w_y[k], 2) + 8 * a * w_y[k] - 4 * a;elseW_y[k] = 0;}for(int k=0;k<4;k++)for (int m = 0; m < 4; m++){if (x[k] > 0 && x[k]<height && y[m] > 0 && y[m] < width) //判断边界gray[k][m] = pDoc->m_pDibInit->GetPixelGray(x[k], y[m]);elsegray[k][m] = 0;}int Pix_gray = 0; //最终计算得到的灰度值for(int k=0;k<4;k++)for (int m = 0; m < 4; m++){Pix_gray += gray[k][m] * W_x[k] * W_y[m];}pDoc->m_pDibTest->SetPixelGray(i, j, Pix_gray);}
实验效果图.

相关文章:
使用VC++设计程序:实现常见的三种图像插值算法:最近邻插值,双线性插值,立方卷积插值
图像放大的三种插值算法 获取源工程可访问gitee可在此工程的基础上进行学习。 该工程的其他文章: 01- 一元熵值、二维熵值 02- 图像平移变换,图像缩放、图像裁剪、图像对角线镜像以及图像的旋转 03-邻域平均平滑算法、中值滤波算法、K近邻均值滤波器 04-…...

多级嵌套vue同步调用用法
//需求 要求同步调用initGame2方法 //调用方法 this.initSocket(); //定义方法为同步 async initSocket() { //调用为同步 await this.initGame2(); //定义方法为同步 async initGame2() {const e await w({ url: //定义w方法 const w e.create({ baseURL: http://my_url:8…...
C#,《小白学程序》第八课:列表(List)其二,编制《高铁列车时刻表》与时间DateTime
1 文本格式 /// <summary> /// 车站信息类 class /// </summary> public class Station { /// <summary> /// 编号 /// </summary> public int Id { get; set; } 0; /// <summary> /// 车站名 /// </summary&g…...

高德地图使用逆地理编码服务
进入高德地图开发者平台申请web服务,并获取web服务生成的key下面是高德地图官网的逆地理编码服务使用说明https://lbs.amap.com/api/webservice/guide/api/georegeo/ getAddressByLocation(latitude, longitude) {const key key; // 高德地图key密钥const url h…...

ArgoCD基本组件
ArgoCD有5个基本组件, $ kubectl get po -n argocd NAME READY STATUS RESTARTS AGE argocd-application-controller-0 1/1 Running 0 19h argocd-dex-server-767fb49f59-7rxn7 1/1 Running 0…...
技术分享 | 在 IDE 插件开发中接入 JCEF 框架
项目背景 当前的开发环境存在多种不同语言的 IDE,如 JetBrains 全家桶、Eclipse、Android Studio 和 VS Code 等等。由于每个 IDE 各有其特定的语言和平台要求,因此开发 IDE 插件时,需要投入大量资源才能尽可能覆盖大部分工具。同时…...
ubuntu 使用webrtc_ros 编译linux webrtc库
ubuntu 使用webrtc_ros 编译linux webrtc库 webrtc_ros 使用WebRTC流式传输ROS图像主题 该节点提供了一个WebRTC对等方,可以将其配置为流ROS图像主题并接收发布到ROS图像主题的流。 该节点托管一个提供简单测试页面的Web服务器,并提供可用于创建和配置W…...

网络通信基础概念介绍
网络通信基础概念介绍 局域网LAN 局域网,即 Local Area Network,简称LAN。 局域网内的主机之间能方便的进行网络通信,又称为内网;局域网和局域网之间在没有连接的情况下,是无法通信的。 局域网是指在一个相对较小的…...

quickapp_快应用_全局数据
全局数据 [1]本地数据存储[2] 数据缓存问题 有时在接口请求的某个数据需要在多个页面使用,此时有2个方法 [1] 将数据存储在本地—> 等价于浏览器的localStorage[2] 将数据存储在数据缓存中 -> 等价于vue中的vuex [1]本地数据存储 官方文档:官方…...

Unity接入Protobuf介绍
Protobuf介绍 Protobuf(Protocol Buffers,简称Proto)是一种轻量级和高效率的数据序列化格式,由Google公司开发。与XML和JSON等文本格式不同,Protobuf是一种二进制格式,它具有更小的体积和更快的速度。在大…...
【anaconda】numpy.dot 向量点乘小技巧
假设向量A[1,1], 向量B[2,3]。如果想知道他们的内积就可以输入如下代码: 当然,如果是两个列向量相乘,肯定是不对的 但是如果没有维度也一样可以求得内积,而且结果不会套在列表里...
YOLOv5小目标检测层
目录 一、原理 二、yaml配置文件 一、原理 小目标检测层,就是增加一个检测头,增加一层锚框,用来检测输入图像中像素较小的目标 二、yaml配置文件 # YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters nc: 3 # number of classes depth_multiple: 0.33 # model…...

mysql 更改密码
由于两台设备的mysql数据库的密码不一样,开发时每次连接数据库都需要更改配置文件,所以想修改一下mysql数据库的密码。 mysql 修改密码千万不要直接修改,直接修改的话会出现两种情况: 1,修改成功,无法登录。…...

Android YUV存储方式
排名 性能:YUV444 > YUV422 > YUV420 > YUV411 YUV444:YUV444 提供最高质量的色彩准确性和图像细节,但需要更多的存储空间和传输带宽。适用于对图像质量要求很高的应用,如专业视频编辑或高端图像处理。YUV422࿱…...

SSM家具个性定制管理系统开发mysql数据库web结构java编程计算机网页源码eclipse项目
一、源码特点 SSM 家具个性定制管理系统是一套完善的信息系统,结合springMVC框架完成本系统,对理解JSP java编程开发语言有帮助系统采用SSM框架(MVC模式开发),系统具有完整的源代码和数据库,系统主要采用…...
来自Microsoft Teams的摄像头背景图片
原文件在👆,下面是预览图 如果你安装了Microsoft Teams也可以搜索MSTeams,就在MSTeams/Backgrounds...
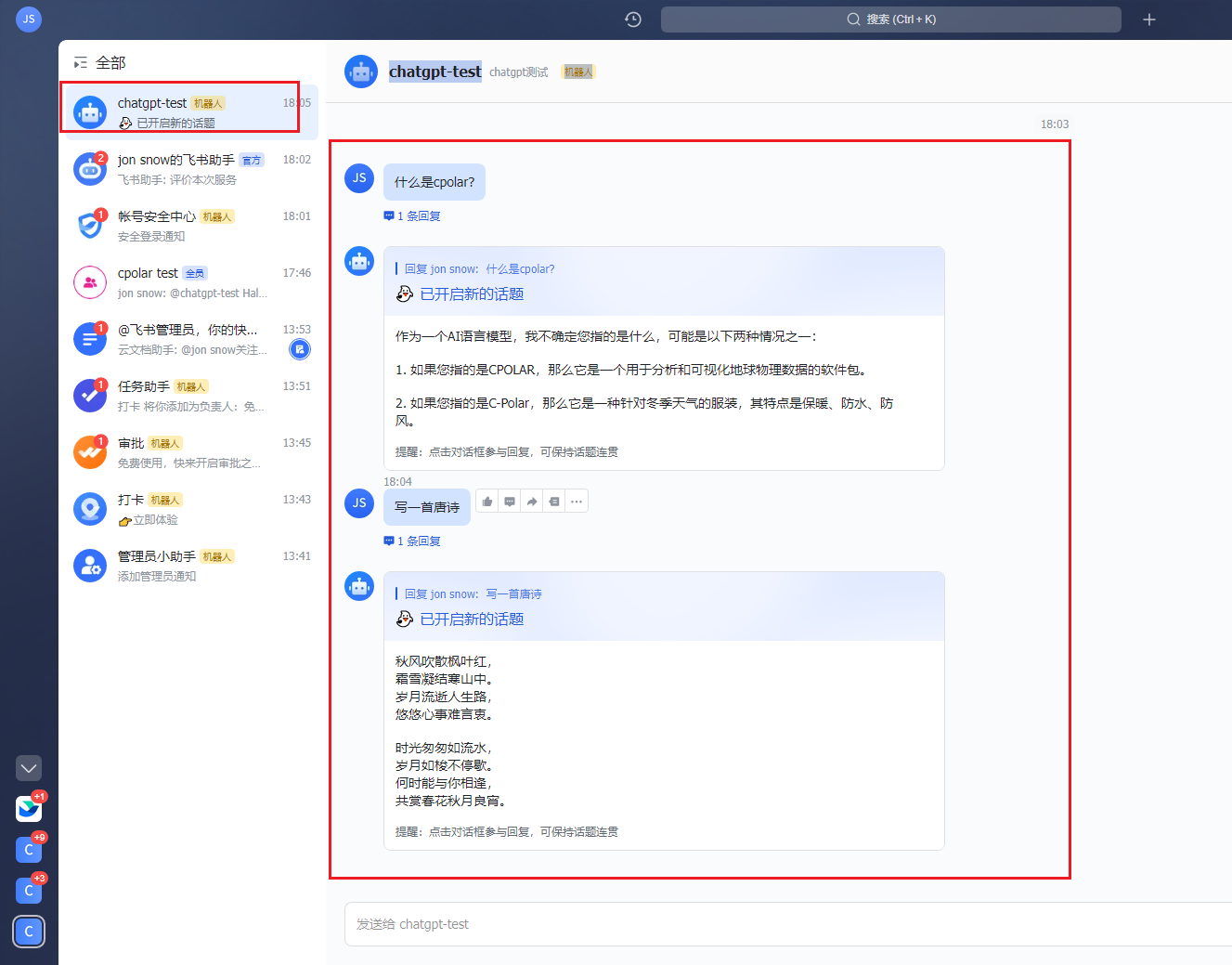
飞书如何接入ChatGPT-打造个人智能问答助手实现无障碍交流
目录 前言 环境列表 1.飞书设置 2.克隆feishu-chatgpt项目 3.配置config.yaml文件 4.运行feishu-chatgpt项目 5.安装cpolar内网穿透 6.固定公网地址 7.机器人权限配置 8.创建版本 9.创建测试企业 10. 机器人测试 总结 前言 在飞书中创建chatGPT机器人并且对话&am…...
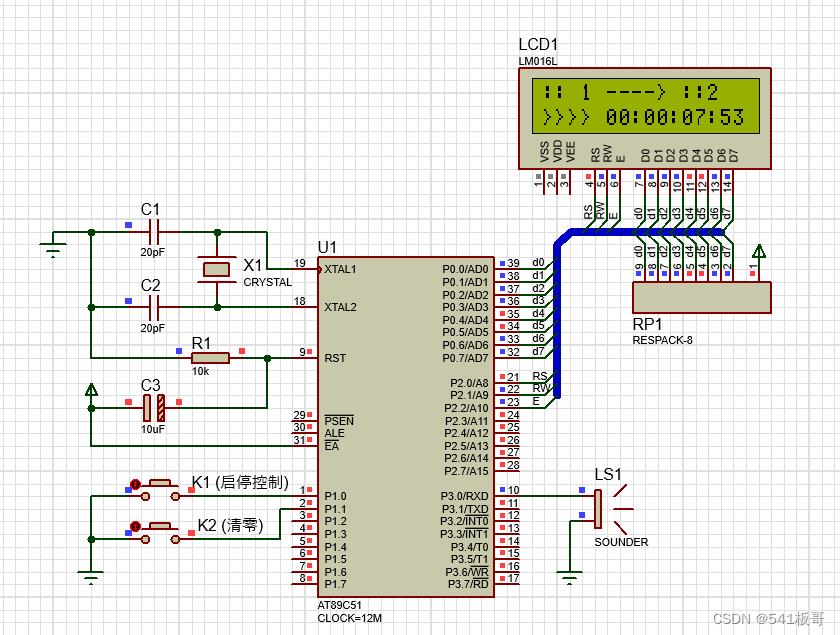
Proteus仿真--基于1602LCD的秒表设计
本文介绍基于1602LCD的秒表设计(完整仿真源文件及代码见文末链接) 仿真图如下 本设计中80C51单片机作为主控,用1602LCD作为显示模块,共有2个按键,K1按键用于秒表计时启停控制,K2用于清零显示内容 仿真运…...

香港站群服务器中1C/2C/4C/8C 的概念及区别
在选择香港站群服务器时,经常会看到1C、2C、4C和8C等不同的IP段。这些IP段代表了不同的子网掩码长度,也反映了服务器的IP地址数量和丰富性。 让我们来了解一下什么是IP段。IP段是指一组连续的IP地址,其中每个地址的前三个数字相同&…...

搭建SRS视频服务器
去官方网站下载FFmpeg6.1 https://ffmpeg.org/download.html拷贝到CentOS7.9中的/opt目录下,解压并重命名 tar -xvf ffmpeg-6.1.tar.xz 解压后编译安装 ./configure make make install从github下载SRS4.0release 解压后 如果ffmpeg的路径不在/usr/local/bin/ffmpe…...

Fish-Speech 1.5实战案例:快速生成产品介绍、广告配音、课件讲解语音
Fish-Speech 1.5实战案例:快速生成产品介绍、广告配音、课件讲解语音 1. 为什么选择Fish-Speech 1.5进行语音合成 在当今内容创作领域,语音合成技术正变得越来越重要。无论是制作产品介绍视频、录制广告配音,还是准备在线课程讲解ÿ…...
的AI工具,可高效完成数学建模论文的复现与智能排版)
借助爱毕业(aibiye)的AI工具,可高效完成数学建模论文的复现与智能排版
还在为论文写作头痛?特别是数学建模的优秀论文复现与排版,时间紧、任务重,AI工具能帮上大忙吗?今天,我们评测10款热门AI论文写作工具,帮你精准筛选最适合的助手。 aibiye:专注于语法润色与结构…...

全文降AI工具价格效果对比:嘎嘎降AI、比话降AI怎么选
全文降AI工具价格效果对比:嘎嘎降AI、比话降AI怎么选 选全文降AI工具的时候,大家最关心两件事:一是效果好不好,二是价格贵不贵。 效果不好,花再少的钱也是浪费。效果好但价格离谱,很多同学也吃不消。所以最…...

Claude API 企业用户为什么更关注账单合规
在企业数字化转型的浪潮中,大模型API已成为提升生产效率、驱动业务创新的核心基础设施。Claude凭借其强大的长文本处理、复杂逻辑推理能力,成为众多企业的首选。然而,在技术选型与落地实践中,企业用户的关注点正从模型性能向账单合…...

explainerdashboard模型监控:持续跟踪模型性能变化
explainerdashboard模型监控:持续跟踪模型性能变化 【免费下载链接】explainerdashboard Quickly build Explainable AI dashboards that show the inner workings of so-called "blackbox" machine learning models. 项目地址: https://gitcode.com/gh…...

商密技术以及运用
商密技术 一、密码技术基础知识 1、 定义 专业定义:密码技术是利用数学算法,对信息进行加密、解密、认证、签名、验签等处理,实现信息的机密性、完整性、真实性、不可否认性的技术总称,是数字世界安全的核心支撑。 总体来说就是&a…...
重构Agent决策内核)
别再用规则引擎模拟因果了!:一位IEEE Fellow亲述——如何用结构方程建模(SEM)重构Agent决策内核
第一章:因果推理模块在AIAgent架构中的定位与范式跃迁 2026奇点智能技术大会(https://ml-summit.org) 传统AI代理(AIAgent)长期依赖关联性建模——从观测数据中挖掘统计模式,却难以区分“相关”与“因果”。当环境动态变化、干预…...

八大网盘直链解析:高效下载解决方案全面解析
八大网盘直链解析:高效下载解决方案全面解析 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 / 迅…...

租车小程序 APP 开发 一体化租车系统搭建提效用车服务
传统租车行业存在流程繁琐、数据割裂、管理低效等痛点,制约了服务质量与运营效率的提升,而租车小程序APP开发通过一体化租车系统搭建,为行业带来全方位的提效解决方案。一体化系统打破了前端用户端与后端管理端的信息壁垒,实现用户…...

【AIAgent安全架构黄金法则】:20年专家首曝3大权限失控漏洞与7层防御落地指南
第一章:AIAgent架构安全边界与权限控制 2026奇点智能技术大会(https://ml-summit.org) AI Agent 系统在生产环境中运行时,其执行链路天然跨越模型推理、工具调用、外部API访问、状态存储与用户交互等多个信任域。若缺乏明确的安全边界划分与细粒度权限控…...