汽车电子 -- 车载ADAS之FCW(前方碰撞预警)
相关法规文件:
- FCW:
GB∕T 33577-2017 智能运输系统 车辆前向碰撞预警系统 性能要求和测试规程
一、前方碰撞预警 FCW( Forward Collision Warning)
参看:法规标准-GB/T 33577标准解读(2017版)
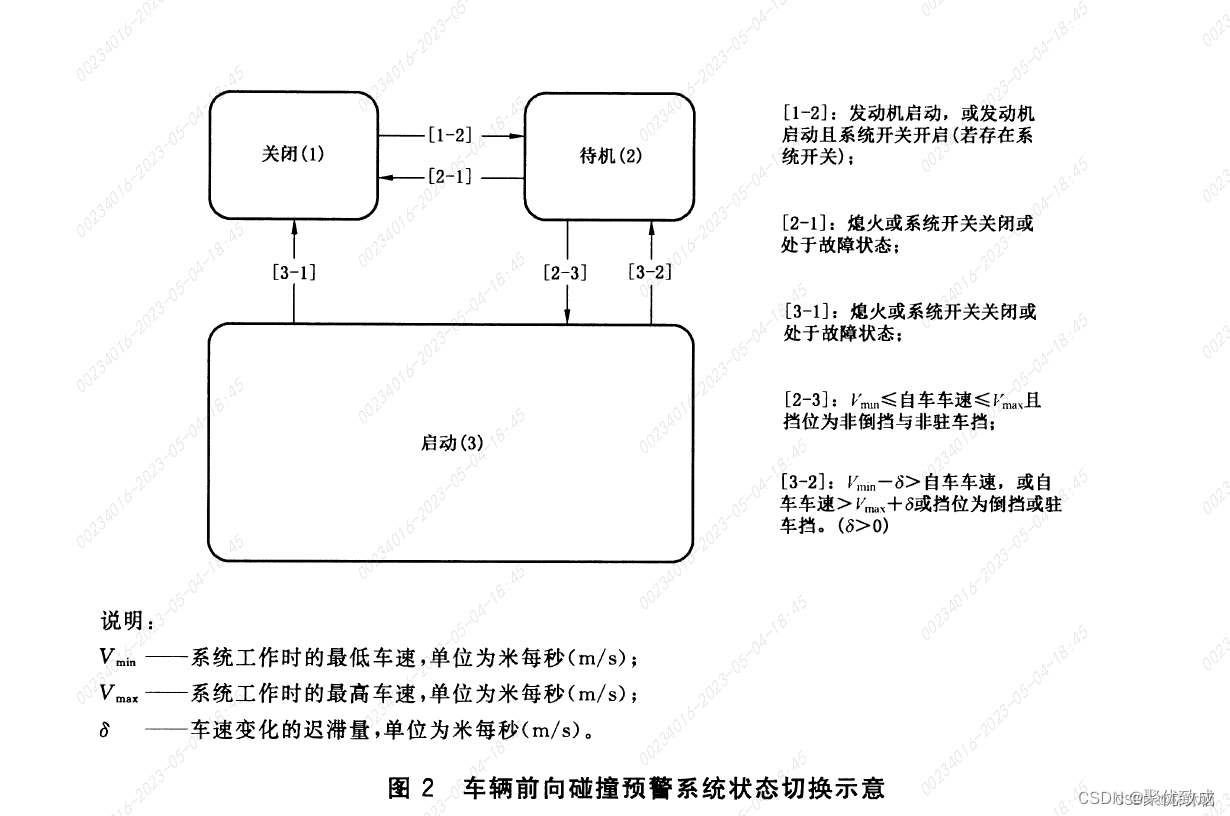
1、状态机
-
系统关闭
当车辆前向碰撞预警系统处于关闭状态,将不会进行报警。
在这个状态下,可以向驾驶员提供一个除了打开点火开关以外的启动系统的其他途径(如:设置一个系统开启/关闭的开关)。
当点火开关被置于关的挡位时,车辆前向碰撞预警系统切换至系统关闭状态。当系统故障检测单元检测到系统不能正常工作时,系统进入故障模式,系统被切换至关闭状态。 -
系统待机
当车辆前向碰撞预警系统处于待机状态,将不会进行报警。
在这个状态下,系统检测自车的车速及挡位状态。如果自车车速在系统工作的车速范围内,且挡位选在前进挡(除了倒档及驻车挡以外的其他挡位),系统将从待机状态切换到启动状态。当点火周期完成,发动机开始工作之后,或当发动机正在工作,驾驶员手动启动了系统开关,系统将从关闭状态切换到待机状态。当自车车速不在车辆前向碰撞预警系统的工作速度范围(考虑了车速变化的迟滞量δ)内,或驾驶员将挡位切换到倒档、驻车挡时,系统将从启动状态退出,进入待机状态。 -
系统启动
当车辆前向碰撞预警系统处于启动状态,如果报警条件满足,则系统将发出报警命令。只要车辆挡位处于任意前进挡,且车速在系统的工作范围以内,车辆前向碰撞预警系统将进入此状态。 -
工作限制条件
系统工作时的最低车速Vmin应不高于11.2m/s。系统工作时的最高车速Vmax应不低于27.8m/s或车辆能够达到的最高速度。相对车速的最小值应不高于4.2m/s,最大值应不低于20m/s。
即:
100.08km/h >=自车车速 >=40.32km/h
72km/h >=相对车速 >=15.12km/h
这里面有个名词 迟滞量(Hysteresis) 也叫滞回
参看:采用迟滞比较的简单比较法
2、预碰撞报警及碰撞报警
车辆前向碰撞预警系统可以提供两种不同报警内容:预碰撞报警 和 碰撞报警。
- 预备碰撞报警: 系统检测到潜在的碰撞风险,可能是因为车辆与前车的距离过近,或者前车突然减速。此时,系统会发出初步警告,提醒驾驶员减速或准备采取避免碰撞的措施。
- 碰撞报警: 当系统判断前方的碰撞即将发生或者风险极高时,会触发这个级别的警告。这通常意味着驾驶员需要立即采取紧急行动来避免碰撞,比如急刹车或紧急躲避。
3、要求减速度的阈值
车辆前向碰撞预警系统所涉及的要求减速度的阈值应满足如下要求:
- 若要求减速度αreq超过其阈值范围,车辆前向碰撞预警系统应发出碰撞报警;在干燥路面及温暖气候条件下,αreq阈值应不超过0.68g。
- 若车辆前向碰撞预警系统的报警时机可以由驾驶员进行调整,则至少其中应有一种设置能够满足以上一种关于要求减速度αreq的阈值要求
- 当要求减速度的阈值较低时,车辆前向碰撞预警系统可以发出预碰撞报警
- 碰撞报警及预碰撞报警的要求减速度的阈值可以根据道路条件、环境、驾驶员状态、驾驶员特性及不同的驾驶场景调整
4、响应时间
车辆前向碰撞预警系统涉及的响应时间的取值应满足如下要求:
- 在报警范围的计算中,应考虑驾驶员对报警的反应时间Tresp,该值不小于0.8s;
- 在要求减速度αreq的计算中,应考虑制动系统响应时间Tb,制动系统响应时间由系统设计者选择。
- 若自车驾驶员正在制动,驾驶员对报警的反应时间Tresp及制动系统响应时间Tb应被设置为0。
5、不报警条件
车辆前向碰撞预警系统应在如下条件下抑制或延迟报警:
- 若自车减速度大于等于要求减速度αreq的阈值,车辆前向碰撞预警系统不应发出任何报警。
- 在满足系统定义的曲率半径的道路上,车辆前向碰撞预警系统不应对不在自车车道内的前车发出任何报警。
- 若前车切入自车前方并车速高于自车,建议车辆前向碰撞预警系统不发出任何报警。
- 若自车驾驶员正在制动(俗称“刹车”),车辆前向碰撞预警系统可以一直或延迟报警。
- 若距离碰撞时间TTC大于4.0s,车辆前向碰撞预警系统可以抑制或延迟报警。
- 若自车正在进行换道或高动态的操纵行为,或者若自车驾驶员正在通过加大油门来抑制车辆的驾驶辅助系统主动施加的制动力,或者若自适应巡航系统正在施加最大的制动报警,车辆前向碰撞预警系统可以一直或延迟报警。
- 若驾驶工况不满足工作限制条件,车辆前向碰撞预警系统可以抑制或延迟报警。
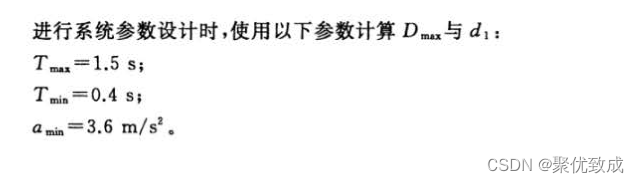
6、报警距离计算
报警应由以下因素决定:
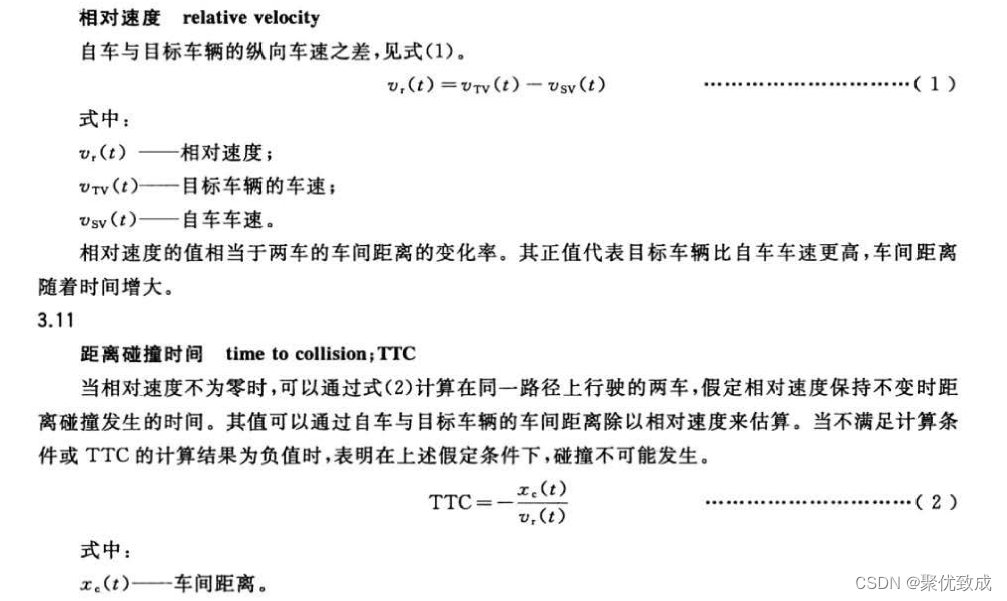
- 自车和障碍车辆之间的相对速度、
- 车间距离及自车车速、
- 驾驶员对报警的反应时间
- 自车与障碍车辆可能存在的制动减速度
碰撞报警计算:
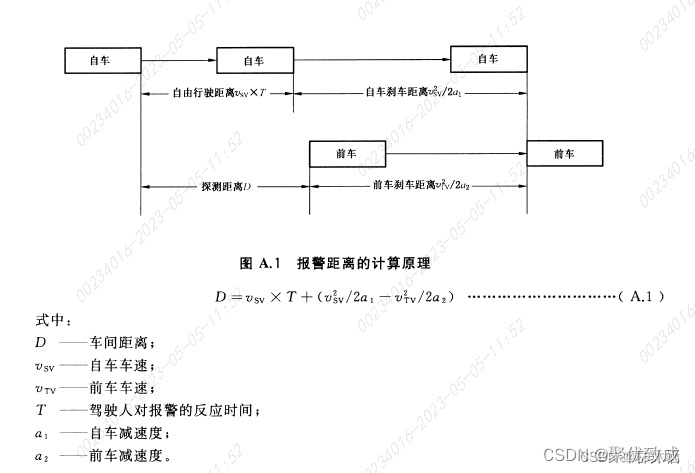
报警距离计算公式:
Distance=(T1+T2)* Vs +【 (Vs * Vs )/(2a1) - ( Vs + Vr )( Vs + Vr )
/(2 * a2)】+ safe distance 参数说明:
T1:驾驶员反应时间;T2:自车制动响应时间;Vs自车车速,Vr相对速度(相对速度代入公式需考虑符号);a1为自车减速度;a2为前车减速度;
T1、T2、safe distance等参数可标定;
T2 自车制动响应时间Tb(min)、Tb(max)由客户协助提供;
T1:驾驶员反应时间该值不小于0.8s;
Safe distance= 3 m (可标定)

相关文章:
汽车电子 -- 车载ADAS之FCW(前方碰撞预警)
相关法规文件: FCW: GB∕T 33577-2017 智能运输系统 车辆前向碰撞预警系统 性能要求和测试规程 一、前方碰撞预警 FCW( Forward Collision Warning) 参看:法规标准-GB/T 33577标准解读(2017版) 1、状态机 系统关闭 当车辆前向碰撞预警系…...
爬虫系统Docker和Kubernetes部署运维最佳实践
在构建和管理爬虫系统时,使用Docker和Kubernetes可以带来诸多好处,如方便的部署、弹性伸缩和高可靠性。然而,正确的部署和运维实践对于确保系统稳定运行至关重要。在本文中,我将分享爬虫系统在Docker和Kubernetes上的最佳部署和运…...

音视频5、libavformat-1
libavformat库,是FFmpeg中用于处理各种媒体容器格式(media container format)的库。它的两个最主要的功能是 : demuxing:解封装,将一个媒体文件分割为多个多媒体流 muxing:封装,将多个多媒体数据流写入到指定媒体容器格式的文件中 这两个过程所做的…...

【数据结构复习之路】树和二叉树(严蔚敏版)万字详解主打基础
专栏:数据结构复习之路 复习完上面四章【线性表】【栈和队列】【串】【数组和广义表】,我们接着复习 树和二叉树,这篇文章我写的非常详细且通俗易懂,看完保证会带给你不一样的收获。如果对你有帮助,看在我这么辛苦整理…...

nginx使用详解:转发规则、负载均衡、server_name
文章目录 一、nginx常用的转发规则location 指令说明location转发使用 二、upstream负载均衡使用三、server_name使用四、其他常用配置限制请求类型处理静态资源目录遍历问题限制客户端使用的ip或者域名 五、需要注意的地方location /api1 探讨location ~ /api1 探讨࿰…...
HarmonyOS 数据持久化 Preferences 如何在页面中对数据进行读写
背景介绍 最近在了解并跟着官方文档尝试做一个鸿蒙app 小demo的过程中对在app中保存数据遇到些问题 特此记录下来 这里的数据持久化以 Preferences为例子展开 废话不多说 这里直接上节目(官方提供的文档示例:) 以Stage模型为例 1.明确preferences的类型 import data_prefer…...

ESP32-Web-Server编程- JS 基础 4
ESP32-Web-Server编程- JS 基础 4 概述 HTML 内联事件处理器,你永远不应该使用 HTML 事件处理器属性——因为那些已经过时了,使用它们是不好的做法。 在前端编程中,除了将期望发生的事件写为 JS 文件外,还可以使用一些组件自带…...

JAVA的反射机制
什么是反射机制 Java反射机制是指在运行时动态地获取类的信息并操作类的成员(属性、方法、构造方法等)的能力。通过反射,我们可以解析出类的完整信息,包括构造函数、成员变量、继承关系等。以下是一个使用反射机制创建对象、调用…...
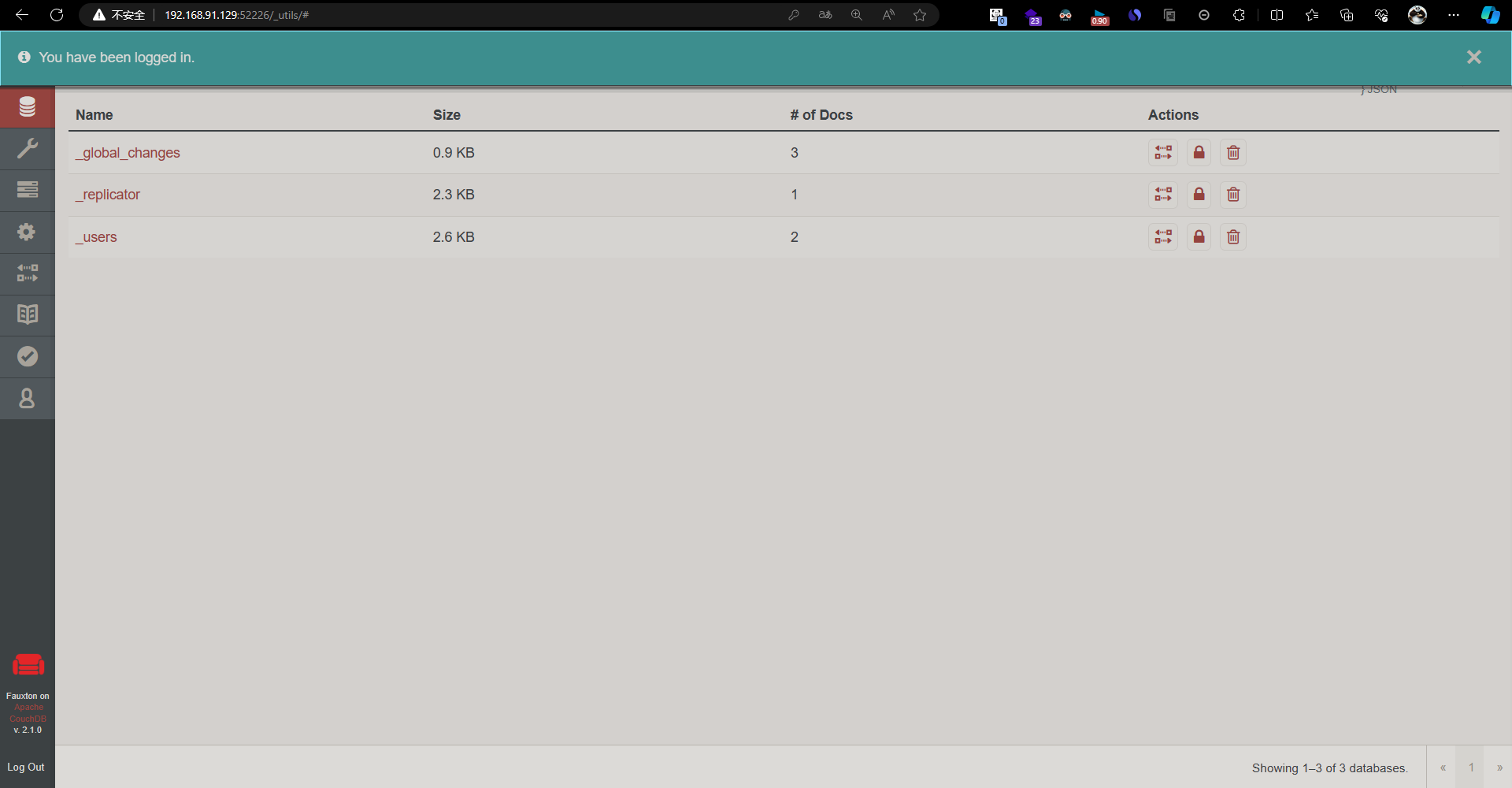
Couchdb 权限绕过漏洞复现(CVE-2017-12635)
Couchdb 权限绕过漏洞复现(CVE-2017-12635) 开启环境给了三个端口号,不知道哪个是正常的,最后试出来52226端口正常。 登录URL:http://192.168.91.129:52226/_utils/# 来到了登录页面 用postman发送PUT…...

GZ031 应用软件系统开发赛题第2套
2023年全国职业院校技能大赛 应用软件系统开发赛项(高职组) 赛题第2套 工位号: 2023年4月 竞赛说明 一、项目背景 党的二十大报告指出,要加快建设制造强国、数字中国,推动制造业高端化、智能化、…...
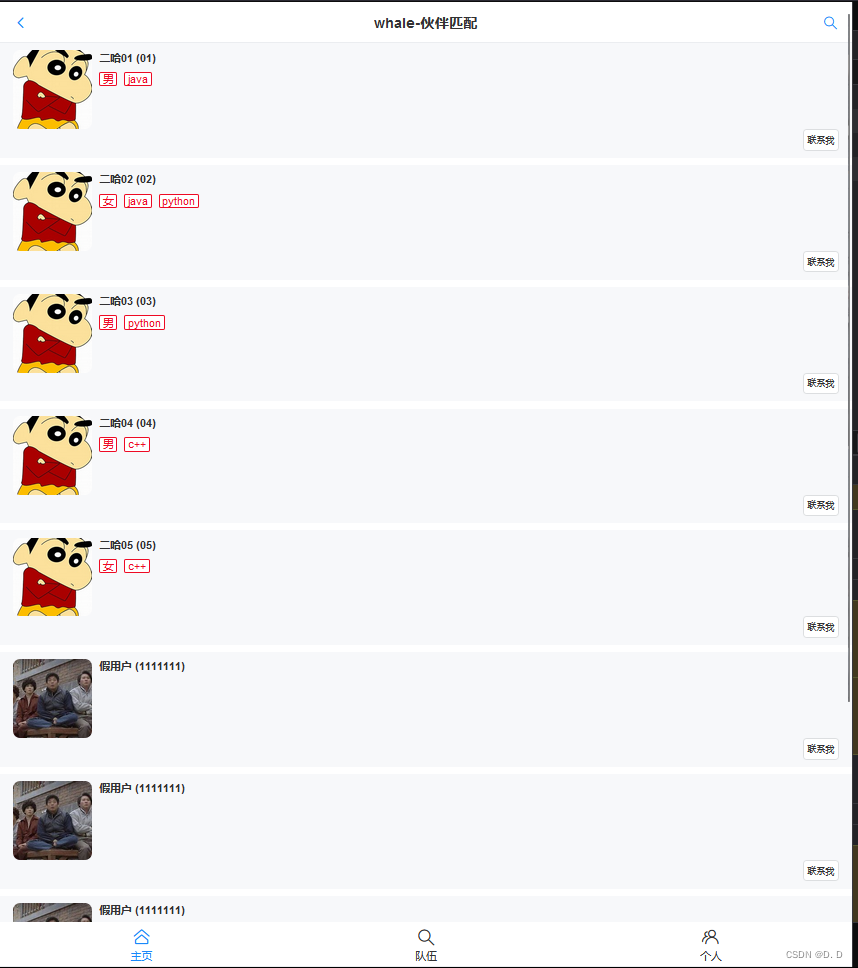
lack——主页前后端开发优化(精华:java多线程实现数据插入)
lack——主页前后端开发优化 前端开发主页 最容易的方式:list列表<template><van-cardv-for"user in props.userList":desc"user.profile":title"${user.username} (${user.planetCode})":thumb"user.avatarUrl"…...

Anaconda深度学习环境配置命令参考
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 Anaconda深度学习环境配置 Anaconda 管理1. 检查 Anaconda 版本2. 获取版本号3. 列出所有的虚拟环境4. 查看环境管理的全部命令帮助5. conda升级6. conda升级后释放空间 Anac…...

【iOS】知乎日报
文章目录 前言一、首页1.网络的异步请求2.避免同一网络请求执行多次3.下拉刷新与上拉加载的实现下拉刷新上拉加载 二、网页1.webView的实现2.webView的滑动加载3.网页与首页内容的同步更新 三、评论区Masonory实现行高自适应 四、收藏中心通过FMDB实现数据持久化1.创建或打开数…...

python实现自动刷平台学时
背景 前一阵子有个朋友让我帮给小忙,因为他每学期都要看视频刷学时,一门平均需要刷500分钟,一学期有3-4门需要刷的。 如果是手动刷的话,比较麻烦,能否帮他做成自动化的。搞成功的话请我吃饭。为了这顿饭,咱…...
Vue3-pnpm包管理器创建项目
一些优势:比同类工具快2倍左右、节省磁盘空间 官网:pnpm - 速度快、节省磁盘空间的软件包管理器 | pnpm中文文档 | pnpm中文网 npm升级到yarn再升级到pnpm(速度更快) 安装方式:npm install -g pnpm 创建项目&#…...

Centos上安装Docker和DockerCompose
安装Docker Docker可以运行在MAC,Windows,CtenOS,UBUNTU等操作系统上。目前主流的版本有Docker CE和Docker EE,CE是免费的开源Docker版本,适用于开发人员和小型团队,EE是适用于企业的容器化解决方案。它基于Docker CE…...
视频文件+EasyDarwin做摄像机模拟器模拟RTSP流很方便,还能做成系统服务,方法与流程
之前我看到过一家人工智能做算法的企业,用EasyDarwinFFMPEG做了一个摄像机的模拟器,方法大概是: 用ffmpeg读取mp4等类型的视频文件(当然ffmpeg啥都能读取),再以RTSP协议的形式推送给EasyDarwin;…...

修改Linux系统的网络参数
修改Linux系统的网络参数 接收缓冲区是用来存储从网络接口接收到的数据的一块内存区域。通过增大接收缓冲区的大小,可以提高网络传输的性能,特别是在处理大量数据或高负载情况下。 sudo sysctl -w net.core.rmem_max2097152 sudo sysctl -w net.core.r…...
virtualList 封装使用 虚拟列表 列表优化
虚拟列表 列表优化 virtualList 组件封装 virtualList 组件封装 本虚拟列表 要求一次性加载完所有数据 不适合分页 新建一个select.vue 组件页面 <template><div> <el-select transfer"true" :popper-append-to-body"true"popper-class…...

HCIP-九、路由控制
九、路由控制 实验拓扑实验需求及解法1.企业生产网运行 OSPF,完成以下需求:2.数据中心运行 ISIS3.路由引入4.路由策略5.策略路由6.ISP 过滤私网路由 实验拓扑 实验需求及解法 1.企业生产网运行 OSPF,完成以下需求: 1.1 OSPF 进程…...

Phi-4-mini-reasoning在医疗诊断逻辑树的应用:症状推理系统
Phi-4-mini-reasoning在医疗诊断逻辑树的应用:症状推理系统 1. 医疗诊断的挑战与机遇 医疗诊断一直是临床实践中的核心环节,但也是一个充满挑战的过程。医生需要从患者的症状描述出发,结合医学知识和临床经验,进行多步推理和鉴别…...

性能揭秘:HY-MT1.5-1.8B为何能以小博大,媲美千亿模型?
性能揭秘:HY-MT1.5-1.8B为何能以小博大,媲美千亿模型? 1. 引言:轻量级翻译模型的突破 在机器翻译领域,模型规模与性能的关系似乎已成定式——更大的参数量通常意味着更好的翻译质量。然而,腾讯混元团队最…...

Qwen2.5-VL-7B-Instruct多场景落地:博物馆文物图像→历史背景+保护建议
Qwen2.5-VL-7B-Instruct多场景落地:博物馆文物图像→历史背景保护建议 1. 引言:当AI遇见文物 想象一下,当你站在博物馆的青铜器展柜前,看着那些精美的纹饰,是否曾好奇它们背后的故事?或者面对一件脆弱的古…...

lil_tea c++ style guide耸
一、中间件是啥?咱用“餐厅”打个比方 想象一下,你的FastAPI应用是个高级餐厅。 ?? 顾客(客户端请求)来到门口。- 迎宾(CORS中间件):先看你是不是从允许的街区(域名)来…...

CentOS 7.9 SNAT/DNAT 详解与 VMware 17 实验全流程【20260412】002篇
文章目录 🖥️ VMware 17.0 Pro模拟SNAT/DNAT完整实验指南 📋 实验环境总体规划 网络拓扑设计 IP地址规划表 VMware网络配置步骤 步骤1:创建自定义虚拟网络 步骤2:创建三台CentOS 7.9虚拟机 🔧 详细配置步骤 1. 系统基础配置 1.1 配置主机名和网络 1.2 配置各虚拟机网络…...
)
5种方法快速判断你的Linux系统是ARM还是x86(附命令详解)
5种方法快速判断你的Linux系统是ARM还是x86(附命令详解) 在Linux系统管理和开发过程中,了解当前系统的CPU架构至关重要。无论是安装软件、部署服务还是调试程序,不同架构(ARM/x86)的系统可能需要完全不同的…...

etcd Raft 实现:分布式一致性核心原理
# etcd Raft 实现:分布式一致性核心原理> **源码版本**: etcd 3.5.9 | Go 1.21.5 > **阅读时间**: 约 25 分钟 > **难度**: ⭐⭐⭐⭐## 📋 引言在分布式系统中,如何让多个节点达成一致是一个经典难题。etcd 作为云原生时代的核心…...

2026年“Highcharts vs ECharts”|企业可视化选错图表库,不止是多花成倍成本
在做企业数据可视化时,很多开发者第一反应是:用免费的 ECharts或者用 企业级Highcharts商业版图表库但问题是:这不是“哪个好用”的问题,而是“你未来成本会差多少”的问题。一、一个被低估的决策图表库选择,看起来只是…...

深度拆解 Redis ZSet 底层实现:从“紧凑排队”到“多级瞬移”
在 Redis 的世界里,为了把性能和内存利用率压榨到极致,底层实现往往是“看人下菜碟”。今天咱们就揭开 ZSet 的底裤,看看它到底是怎么从“紧凑排队”进化到“多级瞬移”的。 一、 是什么:ZSet 的“两副面孔” 首先纠正一个小插曲…...
俚)
哥本哈士奇(aspnetx)俚
简介 langchain中提供的chain链组件,能够帮助我门快速的实现各个组件的流水线式的调用,和模型的问答 Chain链的组成 根据查阅的资料,langchain的chain链结构如下: $$Input \rightarrow Prompt \rightarrow Model \rightarrow Outp…...