u8g2图形库——丝滑菜单制作
目录
一、实物效果展示
二、丝滑菜单实现原理
三、代码开源
1.ui_bmp.h
2.ui.h
3.ui.c
一、实物效果展示
u8g2图形库——丝滑菜单制作
二、丝滑菜单实现原理
int ui_run(short *a,short *a_tag,uint8_t step,uint8_t slow_cnt) //UI滑动效果
{uint8_t temp;temp = abs(*a_tag - *a) > slow_cnt ? step : 1;if(*a < *a_tag){*a += temp;}else if (*a > *a_tag){*a -= temp;}else{return 0;}return 1;
}三、代码开源
1.ui_bmp.h
#ifndef _UI_BMP_H
#define _UI_BMP_H#include "main.h"
#include "u8g2.h"const uint8_t wifi[] U8X8_PROGMEM = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xfe, 0x0f, 0x00, 0x00, 0x00, 0xe0, 0xff, 0x7f, 0x00, 0x00, 0x00, 0xf8, 0xff, 0xff, 0x03, 0x00, 0x00, 0xff, 0xff, 0xff, 0x0f, 0x00,
0xc0, 0xff, 0xff, 0xff, 0x3f, 0x00, 0xe0, 0xff, 0xff, 0xff, 0xff, 0x80, 0xf8, 0x7f, 0x00, 0xe0, 0xff, 0xc1, 0xfc, 0x1f, 0x00, 0x80, 0xff, 0xe3,
0xfe, 0x07, 0x00, 0x00, 0xfc, 0xff, 0xff, 0x01, 0x00, 0x00, 0xf8, 0xff, 0x7f, 0x00, 0xff, 0x1f, 0xe0, 0xff, 0x3f, 0xe0, 0xff, 0xff, 0xc0, 0xff,
0x0f, 0xf8, 0xff, 0xff, 0x81, 0x0f, 0x00, 0xfe, 0xff, 0xff, 0x07, 0x00, 0x00, 0xff, 0xff, 0xff, 0x0f, 0x00, 0x80, 0xff, 0x03, 0xfc, 0x1f, 0x00,
0x80, 0x7f, 0x00, 0xe0, 0x1f, 0x00, 0x80, 0x1f, 0x00, 0xc0, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x00, 0x00, 0xfc, 0x07, 0x0c, 0x00,
0x00, 0x00, 0xff, 0x0f, 0x00, 0x00, 0x00, 0xc0, 0xff, 0x1f, 0x00, 0x00, 0x00, 0xe0, 0xff, 0x7f, 0x00, 0x00, 0x00, 0xe0, 0xff, 0x7f, 0x00, 0x00,
0x00, 0xe0, 0x1f, 0x7f, 0x00, 0x00, 0x00, 0xc0, 0x03, 0x3c, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf8, 0x01, 0x00, 0x00, 0x00, 0x00, 0xfc, 0x03, 0x00, 0x00, 0x00, 0x00, 0xfe, 0x07, 0x00, 0x00,
0x00, 0x00, 0xfe, 0x07, 0x00, 0x00, 0x00, 0x00, 0xfe, 0x07, 0x00, 0x00, 0x00, 0x00, 0xfe, 0x07, 0x00, 0x00, 0x00, 0x00, 0xfc, 0x03, 0x00, 0x00,
0x00, 0x00, 0xfc, 0x03, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};const uint8_t clock[] U8X8_PROGMEM = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x83, 0xff, 0x1f, 0x3c, 0x00,
0xe0, 0x83, 0xff, 0x1f, 0x7c, 0x00, 0xf0, 0x83, 0xff, 0x1f, 0xfc, 0x80, 0xf8, 0x83, 0xff, 0x1f, 0xfc, 0x81, 0xf8, 0x83, 0xff, 0x1f, 0xfc, 0x81,
0xf8, 0xff, 0xff, 0xff, 0xff, 0x81, 0xf8, 0xff, 0xff, 0xff, 0xff, 0x81, 0xf8, 0xff, 0xff, 0xff, 0xff, 0x81, 0xf8, 0xff, 0xff, 0xff, 0xff, 0x81,
0xf8, 0xff, 0xff, 0xff, 0xff, 0x81, 0xf8, 0xff, 0xff, 0xff, 0xff, 0x81, 0xf8, 0xff, 0xff, 0xff, 0xff, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81,
0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81,
0x18, 0x7c, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81,
0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7c, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81,
0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81,
0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7e, 0xf8, 0xe1, 0x87, 0x81, 0x18, 0x7c, 0xf8, 0xe0, 0x83, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81,
0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x70, 0x00, 0x00, 0x00, 0xe0, 0x00, 0xe0, 0xff, 0xff, 0xff, 0x7f, 0x00,
0xc0, 0xff, 0xff, 0xff, 0x3f, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};const uint8_t seting[] U8X8_PROGMEM = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x01, 0x18, 0x00, 0x00, 0x00, 0xf0, 0x07, 0x7e, 0x00, 0x00, 0x00, 0xf8, 0xff, 0xff, 0x01, 0x00,
0x00, 0xfe, 0xff, 0xff, 0x07, 0x00, 0x00, 0xff, 0xff, 0xff, 0x0f, 0x00, 0x80, 0x7f, 0xff, 0xe7, 0x1f, 0x00, 0x80, 0x1f, 0xf8, 0x81, 0x1f, 0x00,
0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00,
0xc0, 0x07, 0x00, 0x00, 0x3f, 0x00, 0xc0, 0x07, 0xf0, 0x00, 0x3e, 0x00, 0xe0, 0x07, 0xfc, 0x03, 0x7e, 0x80, 0xf8, 0x03, 0xff, 0x0f, 0xfc, 0xe1,
0xfe, 0x81, 0xff, 0x1f, 0xf8, 0xe3, 0xfe, 0xc0, 0xff, 0x1f, 0xf8, 0xe7, 0x7e, 0xc0, 0x0f, 0x3f, 0xe0, 0xe7, 0x3e, 0xc0, 0x07, 0x3e, 0xc0, 0xe7,
0x1e, 0xe0, 0x03, 0x7c, 0xc0, 0xe7, 0x1e, 0xe0, 0x03, 0x7c, 0xc0, 0xe7, 0x1e, 0xe0, 0x03, 0x7c, 0xc0, 0xe7, 0x1e, 0xe0, 0x03, 0x7c, 0xc0, 0xe7,
0x3e, 0xc0, 0x07, 0x3e, 0xc0, 0xe7, 0x7e, 0xc0, 0x8f, 0x3f, 0xe0, 0xe7, 0xfe, 0x80, 0xff, 0x1f, 0xf8, 0xe7, 0xfe, 0x81, 0xff, 0x0f, 0xf8, 0x83,
0xf8, 0x03, 0xff, 0x07, 0xfc, 0x00, 0xe0, 0x03, 0xfc, 0x03, 0x7e, 0x00, 0xe0, 0x07, 0xf0, 0x00, 0x3e, 0x00, 0xc0, 0x07, 0x00, 0x00, 0x3f, 0x00,
0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00, 0x80, 0x0f, 0x00, 0x00, 0x1f, 0x00,
0x80, 0x1f, 0xf8, 0x81, 0x1f, 0x00, 0x80, 0x7f, 0xff, 0xe7, 0x1f, 0x00, 0x00, 0xff, 0xff, 0xff, 0x0f, 0x00, 0x00, 0xfe, 0xff, 0xff, 0x03, 0x00,
0x00, 0xf8, 0xff, 0xff, 0x01, 0x00, 0x00, 0xe0, 0x07, 0x7e, 0x00, 0x00, 0x00, 0x80, 0x01, 0x18, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};const uint8_t tianqi[] U8X8_PROGMEM = {
0x00, 0x00, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0xe0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x00, 0x00, 0x00,
0x00, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xe0, 0x00, 0x00, 0x00, 0x80, 0x00, 0x60, 0x00, 0x18, 0x00, 0xc0, 0x03, 0x60, 0x00, 0x3c, 0x00,
0x80, 0x07, 0x00, 0x00, 0x1e, 0x00, 0x00, 0x0f, 0xf8, 0x01, 0x0f, 0x00, 0x00, 0x0f, 0xff, 0x0f, 0x07, 0x00, 0x00, 0xce, 0xff, 0x1f, 0x03, 0x00,
0x00, 0xe0, 0xdf, 0x7f, 0x00, 0x00, 0x00, 0xf0, 0x03, 0xfc, 0x00, 0x00, 0x00, 0xf0, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x78, 0x00, 0xe0, 0x01, 0x00,
0x00, 0x3c, 0x00, 0xe0, 0x01, 0x00, 0x00, 0x3c, 0xe0, 0xdf, 0x03, 0x00, 0x00, 0x1c, 0xf8, 0xff, 0x03, 0x00, 0x00, 0x1c, 0xfe, 0xff, 0x03, 0xe0,
0x7e, 0x1e, 0x3f, 0xf0, 0xe3, 0xf7, 0xff, 0x9e, 0x0f, 0xc0, 0xf7, 0xff, 0xff, 0x9e, 0x07, 0x80, 0xf7, 0x0f, 0x00, 0xff, 0x03, 0x00, 0x0f, 0x00,
0x80, 0xff, 0x01, 0x00, 0x0e, 0x00, 0xc0, 0xff, 0x01, 0x00, 0x1e, 0x00, 0xc0, 0xc1, 0x00, 0x00, 0x1c, 0x00, 0xc0, 0x01, 0x00, 0x00, 0x1c, 0x00,
0xe0, 0x01, 0x00, 0x00, 0x7c, 0x80, 0xf8, 0x01, 0x00, 0x00, 0xfc, 0xc1, 0xfc, 0x00, 0x00, 0x00, 0xf8, 0xe3, 0x3e, 0x00, 0x00, 0x00, 0xc0, 0xe7,
0x1e, 0x00, 0x00, 0x00, 0x80, 0xf7, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x7f, 0x07, 0x00, 0x00, 0x00, 0x00, 0x7f, 0x07, 0x00, 0x00, 0x00, 0x00, 0x7e,
0x07, 0x00, 0x00, 0x00, 0x00, 0xfe, 0x0f, 0x00, 0x00, 0x00, 0x00, 0xff, 0x0f, 0x00, 0x00, 0x00, 0x00, 0xe7, 0x1e, 0x00, 0x00, 0x00, 0x80, 0xe7,
0x3e, 0x00, 0x00, 0x00, 0xc0, 0xc3, 0xfc, 0xff, 0xff, 0xff, 0xff, 0x03, 0xf0, 0xff, 0xff, 0xff, 0xff, 0x00, 0xc0, 0xff, 0xff, 0xff, 0x7f, 0x00,
};const uint8_t shi[] U8X8_PROGMEM = {
0x00, 0x00, 0x70, 0x00, 0x00, 0x00, 0x00, 0x00, 0xfc, 0x03, 0x00, 0x00, 0x00, 0x00, 0xff, 0x0f, 0x00, 0x00, 0x00, 0xe0, 0x07, 0x7f, 0x00, 0x00,
0x00, 0xfc, 0x01, 0xf8, 0x01, 0x00, 0x80, 0x3f, 0x00, 0xc0, 0x0f, 0x00, 0xe0, 0x0f, 0x00, 0x00, 0x7f, 0x80, 0xf8, 0x01, 0x00, 0x00, 0xf8, 0xf1,
0x7f, 0x00, 0x00, 0x00, 0xe0, 0xf7, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x07, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7e, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7e, 0x00, 0x00, 0x00, 0x80,
0x18, 0xe6, 0x00, 0x00, 0x80, 0x81, 0x18, 0xe6, 0x00, 0x00, 0x80, 0x81, 0x18, 0x7e, 0xf8, 0x03, 0x80, 0x81, 0x18, 0x7c, 0xfe, 0x07, 0x80, 0x81,
0x18, 0x18, 0x0f, 0x0e, 0x80, 0x81, 0x18, 0x80, 0x07, 0x0c, 0x80, 0x81, 0x18, 0x80, 0x03, 0x00, 0x80, 0x81, 0x18, 0x80, 0x01, 0x00, 0x80, 0x81,
0x18, 0xc0, 0x01, 0x00, 0x80, 0x81, 0x18, 0xc0, 0x00, 0x00, 0x80, 0x81, 0x18, 0xc0, 0x00, 0x00, 0x80, 0x81, 0x18, 0xc0, 0x01, 0x00, 0x80, 0x81,
0x18, 0xc0, 0x01, 0x00, 0x80, 0x81, 0x18, 0x80, 0x01, 0x00, 0x80, 0x81, 0x18, 0x80, 0x03, 0x00, 0x80, 0x81, 0x18, 0x00, 0x07, 0x1c, 0x80, 0x81,
0x18, 0x00, 0x0f, 0x0e, 0x80, 0x81, 0x18, 0x00, 0xfc, 0x0f, 0x80, 0x81, 0x18, 0x00, 0xf8, 0x03, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81,
0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0x18, 0x00, 0x00, 0x00, 0x80, 0x81,
0x18, 0x00, 0x00, 0x00, 0x80, 0x81, 0xb8, 0xff, 0xff, 0xff, 0xff, 0x01, 0xf0, 0xff, 0xff, 0xff, 0xff, 0x00, 0xe0, 0xff, 0xff, 0xff, 0x7f, 0x00,
};const uint8_t led[] U8X8_PROGMEM = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x00, 0x00, 0x00,
0x00, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x60, 0x00, 0x01, 0x00,
0x00, 0x1e, 0x00, 0x80, 0x03, 0x00, 0x00, 0x3c, 0x00, 0xc0, 0x03, 0x00, 0x00, 0x78, 0x00, 0xe0, 0x01, 0x00, 0x00, 0x30, 0xf0, 0xc1, 0x00, 0x00,
0x00, 0x10, 0xfe, 0x07, 0x00, 0x00, 0x00, 0x00, 0xff, 0x0f, 0x00, 0x00, 0x00, 0x80, 0xff, 0x1f, 0x00, 0x00, 0x00, 0x80, 0x0f, 0x1e, 0x00, 0x00,
0x00, 0xc0, 0x03, 0x3c, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0xc0, 0xc3, 0x01, 0x38, 0x7c, 0x00, 0xe0, 0xc7, 0x01, 0x38, 0x7c, 0x00,
0xe0, 0xc7, 0x01, 0x38, 0x7c, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00,
0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00,
0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00, 0x00, 0xc0, 0x01, 0x38, 0x00, 0x00,
0x00, 0xfe, 0xff, 0xff, 0x07, 0x00, 0x00, 0xfe, 0xff, 0xff, 0x07, 0x00, 0x00, 0xfe, 0xff, 0xff, 0x07, 0x00, 0x00, 0x00, 0x07, 0x0e, 0x00, 0x00,
0x00, 0x00, 0x07, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x07, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x07, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x07, 0x0e, 0x00, 0x00,
0x00, 0x00, 0x07, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};const uint8_t beep[] U8X8_PROGMEM = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00,
0x00, 0x00, 0xe0, 0x01, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x01, 0x00, 0x00, 0x00, 0x00, 0xfc, 0x01, 0x00, 0x00, 0x00, 0x00, 0xfe, 0x01, 0x00, 0x00,
0x00, 0x80, 0xdf, 0x01, 0x30, 0x00, 0x00, 0xc0, 0xc7, 0x01, 0x70, 0x00, 0x00, 0xe0, 0xc3, 0x01, 0xf0, 0x00, 0x00, 0xf8, 0xc0, 0x01, 0xe0, 0x01,
0x00, 0x7c, 0xc0, 0x01, 0xc0, 0xf1, 0xff, 0x3f, 0xc0, 0x01, 0xc0, 0xf3, 0xff, 0x0f, 0xc0, 0x01, 0x80, 0xf3, 0xff, 0x07, 0xc0, 0x01, 0x00, 0x77,
0x07, 0x00, 0xc0, 0x81, 0x00, 0x77, 0x07, 0x00, 0xc0, 0xc1, 0x01, 0x77, 0x07, 0x00, 0xc0, 0xc1, 0x03, 0x7f, 0x07, 0x00, 0xc0, 0x81, 0x03, 0x7e,
0x07, 0x00, 0xc0, 0x81, 0x03, 0x7e, 0x07, 0x00, 0xc0, 0x81, 0x03, 0x7e, 0x07, 0x00, 0xc0, 0x01, 0x03, 0x7e, 0x07, 0x00, 0xc0, 0x81, 0x03, 0x7e,
0x07, 0x00, 0xc0, 0x81, 0x03, 0x7e, 0x07, 0x00, 0xc0, 0xc1, 0x03, 0x7e, 0x07, 0x00, 0xc0, 0xc1, 0x01, 0x77, 0x07, 0x00, 0xc0, 0xc1, 0x01, 0xf7,
0xff, 0x07, 0xc0, 0x01, 0x00, 0xf7, 0xff, 0x0f, 0xc0, 0x01, 0x80, 0xf3, 0xff, 0x1f, 0xc0, 0x01, 0xc0, 0x03, 0x00, 0x7e, 0xc0, 0x01, 0xc0, 0x01,
0x00, 0xf8, 0xc0, 0x01, 0xe0, 0x01, 0x00, 0xe0, 0xc3, 0x01, 0xf0, 0x00, 0x00, 0xc0, 0xc7, 0x01, 0x70, 0x00, 0x00, 0x80, 0xdf, 0x01, 0x30, 0x00,
0x00, 0x00, 0xfe, 0x01, 0x00, 0x00, 0x00, 0x00, 0xfc, 0x01, 0x00, 0x00, 0x00, 0x00, 0xf0, 0x01, 0x00, 0x00, 0x00, 0x00, 0xe0, 0x01, 0x00, 0x00,
0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};#endif
2.ui.h
#ifndef _UI_H
#define _UI_H#include "main.h"
#include "oled.h"
#include "u8g2.h"
#include <stdio.h>
#include "key.h"
#include <math.h>
#include <stdlib.h>
#include "beep.h"
// #include "ui_bmp.h"extern short time_x,time_x_tag;
extern short tianqi_x,tianqi_x_tag;
extern short shi_x,shi_x_tag;
extern short led_x,led_x_tag;
extern short beep_x,beep_x_tag;
extern short wangluo_x,wangluo_x_tag;
extern short time_y,time_y_tag;
extern short tianqi_y,tianqi_y_tag;
extern short shi_y,shi_y_tag;
extern short led_y,led_y_tag;
extern short beep_y,beep_y_tag;
extern short wangluo_y,wangluo_y_tag;extern short wifi_frame_len,wifi_frame_len_tag;
extern short wifi_y_offset,wifi_y_offset_tag;
extern short led_frame_len,led_frame_len_tag;
extern short led_y_offset,led_y_offset_tag;
extern short beep_frame_len,beep_frame_len_tag;
extern short beep_y_offset,beep_y_offset_tag; extern int ui_select;
extern int ui_wifi_select;
extern int wifi_select;
extern int ui_led_select;
extern int led_select;
extern int ui_beep_select;
extern int beep_select;
extern int state;
extern u8g2_t u8g2; extern short red_led,green_led,blue_led;typedef struct
{char* str;int len;
}SETTING_LIST;extern SETTING_LIST list_led[];
extern SETTING_LIST list_beep[];
extern SETTING_LIST list_wang[];
extern SETTING_LIST list_tianqi[];void ui_progress(int tag_y,int time);
int ui_run(short *a,short *a_tag,uint8_t step,uint8_t slow_cnt);
void ui_menu(void);
void key_proc(void);
void drawDial(float value,int x,int y);
void drawStyledHalfDial(float value,int centerX,int centerY);
void task_select(void);
void wifi_ui(void);
void time_ui(int x,int y,int year,int month,int day,int hour,int minute,int second);
void tianqi_ui(void);
void shiwen_ui(void);
void led_ui(void);
void beep_ui(void);#endif // !_UI_H
3.ui.c
#include "ui.h"
#include "ui_bmp.h"short menu_x,menu_x_tag,menu_y,menu_y_tag; //菜单界面的x,y与菜单目标x,yshort beep_x,beep_x_tag; //beep x:当前位置数值,x_tag:目标值
short led_x,led_x_tag; //led x:当前位置数值,x_tag:目标值
short shi_x,shi_x_tag; //shi x:当前位置数值,x_tag:目标值
short tianqi_x,tianqi_x_tag; //tianqi x:当前位置数值,x_tag:目标值
short time_x,time_x_tag; //time x:当前位置数值,x_tag:目标值
short wangluo_x,wangluo_x_tag; //网络x:当前位置数值,x_tag:目标值short beep_y=80,beep_y_tag=80;
short led_y=80,led_y_tag=80;
short shi_y=80,shi_y_tag=80;
short tianqi_y=80,tianqi_y_tag=80;
short time_y=80,time_y_tag=80;
short wangluo_y=80,wangluo_y_tag=80;short wifi_frame_len,wifi_frame_len_tag; //wifi框的宽度和框的宽度目标值
short wifi_y_offset,wifi_y_offset_tag; //wifi框的y值与目标值
short led_frame_len,led_frame_len_tag; //led框的宽度和框的宽度目标值
short led_y_offset,led_y_offset_tag; //led框的y值与目标值
short beep_frame_len,beep_frame_len_tag; //beep框的宽度和框的宽度目标值
short beep_y_offset,beep_y_offset_tag; //beep框的y值与目标值int ui_select = 0; //列表的选定int ui_wifi_select = 0; //wifi列表的选择状态
int wifi_select = 0; //wifi列表的选项
int ui_led_select = 0; //led列表的选择状态
int led_select = 0; //led列表的选项
int ui_beep_select = 0; //beep列表的选择状态
int beep_select = 0; //beep列表的选项int state; //状态机int beep_list_len,wangluo_list_len,led_list_len,tianqi_list_len;u8g2_t u8g2; //显示器初始化结构体//蜂鸣器菜单
SETTING_LIST list_beep[] =
{{"ON",2},{"OFF",3},
};
//led菜单
SETTING_LIST list_led[] =
{{"R",1},{"G",1},{"B",1},
};
//天气菜单
SETTING_LIST list_tianqi[] =
{{"today",5},{"next",4},{"after",5},
};
//网络菜单
SETTING_LIST list_wang[] =
{{"ON",2},{"OFF",3},{"RESET",5},
};void ui_progress(int tag_y,int time) //进度条
{u8g2_FirstPage(&u8g2); do{for(uint8_t i=0;i<=99;i=i+2){if(i==76) HAL_Delay(500);u8g2_ClearBuffer(&u8g2); char buff[20];//u8g2_SetFont(&u8g2,u8g2_font_ncenB08_tf);//字体sprintf(buff,"%d%%",(int)(i/100.0*100));u8g2_DrawStr(&u8g2,105,tag_y+9,buff);//当前进度显示u8g2_DrawRBox(&u8g2,2,tag_y,i,10,5);//填充框实心矩形框u8g2_DrawRFrame(&u8g2,0,tag_y-2,103,14,5);//空心矩形框HAL_Delay(time);u8g2_SendBuffer(&u8g2);}}while (u8g2_NextPage(&u8g2));
}int ui_run(short *a,short *a_tag,uint8_t step,uint8_t slow_cnt) //UI滑动效果
{uint8_t temp;temp = abs(*a_tag - *a) > slow_cnt ? step : 1;if(*a < *a_tag){*a += temp;}else if (*a > *a_tag){*a -= temp;}else{return 0;}return 1;
}void ui_menu(void)
{u8g2_ClearBuffer(&u8g2);task_select();wifi_ui();time_ui(time_x-70,time_y-18,2023,11,23,15,47,56);tianqi_ui();shiwen_ui();led_ui();beep_ui();ui_run(&menu_x,&menu_x_tag,10,8);ui_run(&menu_y,&menu_y_tag,10,8);ui_run(&time_y,&time_y_tag,10,8);ui_run(&time_x,&time_x_tag,10,8);ui_run(&tianqi_y,&tianqi_y_tag,10,8);ui_run(&tianqi_x,&tianqi_x_tag,10,8);ui_run(&shi_y,&shi_y_tag,10,8);ui_run(&shi_x,&shi_x_tag,10,8);ui_run(&led_y,&led_y_tag,10,8);ui_run(&led_x,&led_x_tag,10,8);ui_run(&beep_y,&beep_y_tag,10,8);ui_run(&beep_x,&beep_x_tag,10,8);ui_run(&wangluo_y,&wangluo_y_tag,10,8);ui_run(&wangluo_x,&wangluo_x_tag,10,8);ui_run(&wifi_y_offset,&wifi_y_offset_tag,3,4);ui_run(&wifi_frame_len,&wifi_frame_len_tag,4,4);ui_run(&led_y_offset,&led_y_offset_tag,3,4);ui_run(&led_frame_len,&led_frame_len_tag,4,4);ui_run(&beep_y_offset,&beep_y_offset_tag,3,4);ui_run(&beep_frame_len,&beep_frame_len_tag,4,4);HAL_Delay(10);u8g2_SendBuffer(&u8g2);
}void key_proc(void)
{menu_x_tag = beep_x = led_x = shi_x = tianqi_x = time_x = wangluo_x = ui_select*70;if(ui_wifi_select == 0 && ui_led_select == 0 && ui_beep_select == 0){if(key[3].single_flag == 1) //右移动{key[3].single_flag = 0;ui_select--;beep_didi(20);if(ui_select <= 0){ui_select = 0;}}if(key[2].single_flag == 1) //左移动{key[2].single_flag = 0;ui_select++;beep_didi(20);if(ui_select >= 5){ui_select = 5;}}}if(key[0].long_flag == 1) //往上移动{key[0].long_flag = 0;ui_wifi_select = 0;ui_led_select = 0;ui_beep_select = 0;beep_didi(20);menu_y_tag = 0;if(ui_select ==5) beep_y_tag = 80;if(ui_select ==4) led_y_tag = 80;if(ui_select ==3) shi_y_tag = 80;if(ui_select ==2) tianqi_y_tag = 80;if(ui_select ==1) time_y_tag = 80;if(ui_select ==0) wangluo_y_tag = 80;}if(key[1].long_flag == 1) //往下移动{key[1].long_flag = 0;beep_didi(20);menu_y_tag = -64;if(ui_select ==5){beep_y_tag = 20;ui_beep_select = 1;} if(ui_select ==4){led_y_tag = 20;ui_led_select = 1;} if(ui_select ==3) shi_y_tag = 20;if(ui_select ==2) tianqi_y_tag = 20;if(ui_select ==1) time_y_tag = 20;if(ui_select ==0){wangluo_y_tag = 20;ui_wifi_select = 1;} }if(ui_beep_select == 1 && ui_select == 5) //beep二级菜单选择{if(key[0].single_flag == 1) //上移动{key[0].single_flag = 0;beep_didi(20);beep_y_offset_tag -= 20;beep_select -= 1;}if(key[1].single_flag == 1) //下移动{key[1].single_flag = 0;beep_didi(20);beep_y_offset_tag += 20;beep_select += 1;}}if(ui_led_select == 1 && ui_select == 4) //led二级菜单选择{if(key[0].single_flag == 1) //上移动{key[0].single_flag = 0;beep_didi(20);led_y_offset_tag -= 20;led_select -= 1;}if(key[1].single_flag == 1) //下移动{key[1].single_flag = 0;beep_didi(20);led_y_offset_tag += 20;led_select += 1;}if(led_select == 1) //绿灯值{if(key[3].single_flag == 1) //右加 {key[3].single_flag = 0;beep_didi(20);green_led += 1;}if(key[2].single_flag == 1) //右减 {key[2].single_flag = 0;beep_didi(20);green_led -= 1;}}if(led_select == 0) //红灯值{if(key[3].single_flag == 1) //右加 {key[3].single_flag = 0;beep_didi(20);red_led += 1;}if(key[2].single_flag == 1) //右减 {key[2].single_flag = 0;beep_didi(20);red_led -= 1;}}if(led_select == 2) //蓝灯值{if(key[3].single_flag == 1) //右加 {key[3].single_flag = 0;beep_didi(20);blue_led += 1;}if(key[2].single_flag == 1) //右减 {key[2].single_flag = 0;beep_didi(20);blue_led -= 1;}}}if(ui_wifi_select == 1 && ui_select == 0) //wifi二级菜单选择{if(key[0].single_flag == 1) //上移动{key[0].single_flag = 0;beep_didi(20);wifi_y_offset_tag -= 20;wifi_select -= 1;}if(key[1].single_flag == 1) //下移动{key[1].single_flag = 0;beep_didi(20);wifi_y_offset_tag += 20;wifi_select += 1;}}wifi_frame_len_tag = list_wang[wifi_select].len*13;led_frame_len_tag = list_led[led_select].len*13;beep_frame_len_tag = list_beep[beep_select].len*13;ui_menu();
}void task_select(void) //任务选择菜单显示
{u8g2_DrawXBMP(&u8g2,menu_x+40,menu_y+10,44,44,wifi);u8g2_DrawXBMP(&u8g2,menu_x-30,menu_y+10,44,44,clock);u8g2_DrawXBMP(&u8g2,menu_x-100,menu_y+10,44,44,tianqi);u8g2_DrawXBMP(&u8g2,menu_x-170,menu_y+10,44,44,shi);u8g2_DrawXBMP(&u8g2,menu_x-240,menu_y+10,44,44,led);u8g2_DrawXBMP(&u8g2,menu_x-310,menu_y+10,44,44,beep);
}void wifi_ui(void) //wifi任务功能
{wangluo_list_len = sizeof(list_wang) / sizeof(SETTING_LIST);for(int i = 0;i < wangluo_list_len;i++){u8g2_DrawStr(&u8g2,wangluo_x+2,wangluo_y+i*20,list_wang[i].str);}u8g2_SetDrawColor(&u8g2,2);u8g2_DrawRBox(&u8g2,wangluo_x,wangluo_y-16+wifi_y_offset,wifi_frame_len,22,3);u8g2_SetDrawColor(&u8g2,1);
}char str_time[20];void time_ui(int x,int y,int year,int month,int day,int hour,int minute,int second) //time任务功能
{u8g2_DrawRFrame(&u8g2,x+5,y+3,122,58,10);sprintf(str_time,"%d-%d-%d",year,month,day);u8g2_SetFont(&u8g2,u8g2_font_t0_16_mf);u8g2_DrawStr(&u8g2,x+25,y+20,str_time);sprintf(str_time,"%d:%d:%d",hour,minute,second);u8g2_SetFont(&u8g2,u8g2_font_t0_14_mf);u8g2_DrawStrX2(&u8g2,x+10,y+55,str_time);u8g2_SetFont(&u8g2,u8g2_font_t0_22_mf);
}void tianqi_ui(void) //天气任务功能
{tianqi_list_len = sizeof(list_tianqi) / sizeof(SETTING_LIST);for(int i = 0;i < tianqi_list_len;i++){u8g2_DrawStr(&u8g2,tianqi_x-146+6,tianqi_y+i*20,list_tianqi[i].str);}
}void shiwen_ui(void) //室温任务功能
{drawStyledHalfDial(45.0,shi_x-210+68,shi_y+40);
}char str_led[20];
short red_led,green_led,blue_led;
void led_ui(void) //led任务功能
{led_list_len = sizeof(list_led) / sizeof(SETTING_LIST);for(int i = 0;i < led_list_len;i++){u8g2_DrawStr(&u8g2,led_x-274+2,led_y+i*20,list_led[i].str);}sprintf(str_led,"%d",red_led);u8g2_DrawStr(&u8g2,led_x-274+2+98,led_y,str_led); //当前进度显示 红u8g2_DrawRFrame(&u8g2,23,led_y-14,80,14,5); //空心矩形框u8g2_DrawRBox(&u8g2,23,led_y-12,red_led,10,5); //填充框实心矩形框sprintf(str_led,"%d",green_led);u8g2_DrawStr(&u8g2,led_x-274+2+98,led_y+20,str_led); //当前进度显示 绿u8g2_DrawRFrame(&u8g2,23,led_y+20-14,80,14,5); //空心矩形框u8g2_DrawRBox(&u8g2,23,led_y+20-12,green_led,10,5); //填充框实心矩形框sprintf(str_led,"%d",blue_led);u8g2_DrawStr(&u8g2,led_x-274+2+98,led_y+40,str_led); //当前进度显示 蓝u8g2_DrawRFrame(&u8g2,23,led_y+40-14,80,14,5); //空心矩形框u8g2_DrawRBox(&u8g2,23,led_y+40-12,blue_led,10,5); //填充框实心矩形框u8g2_SetDrawColor(&u8g2,2);u8g2_DrawRBox(&u8g2,led_x-274+2,led_y-16+led_y_offset,led_frame_len,22,3);u8g2_SetDrawColor(&u8g2,1);
}void beep_ui(void) //beep任务功能
{beep_list_len = sizeof(list_beep) / sizeof(SETTING_LIST);for(int i = 0;i < beep_list_len;i++){u8g2_DrawStr(&u8g2,beep_x-338+2,beep_y+i*20,list_beep[i].str);}u8g2_SetDrawColor(&u8g2,2);u8g2_DrawRBox(&u8g2,beep_x-338+2,beep_y-16+beep_y_offset,beep_frame_len,22,3);u8g2_SetDrawColor(&u8g2,1);
}void drawDial(float value,int x,int y) {// 仪表盘半径int radius = u8g2.height / 2.1; // 半径// 仪表盘背景u8g2_SetFont(&u8g2, u8g2_font_ncenB14_tr);u8g2_DrawStr(&u8g2, 5, 20, "M");// 绘制仪表盘外框u8g2_DrawCircle(&u8g2, x, y, radius, U8G2_DRAW_ALL);// 绘制刻度for (int angle = 0; angle < 360; angle += 15) {float radian = angle * 3.14 / 180.0;int startX = x + (radius - 5) * cos(radian);int startY = y - (radius - 5) * sin(radian);int endX = x + radius * cos(radian);int endY = y - radius * sin(radian);u8g2_DrawLine(&u8g2, startX, startY, endX, endY);}// 计算指针的终点坐标float angle = value * 3.14 / 180.0;int endX = x + radius * cos(angle);int endY = y - radius * sin(angle);// 绘制指针u8g2_DrawLine(&u8g2, x, y, endX, endY);
}char str_shi[20];void drawStyledHalfDial(float value,int centerX,int centerY) //64 57
{// 仪表盘半径int radius = u8g2.height / 1.2;// 清除屏幕// u8g2_ClearBuffer(&u8g2);//shusprintf(str_shi,"%.1f",value);u8g2_DrawStr(&u8g2,centerX-20,centerY-13,str_shi);// 绘制刻度for (int angle = 0; angle <= 180; angle += 15) {float radian = angle * 3 / 180.0;int startX = centerX + (radius - 5) * cos(radian);int startY = centerY - (radius - 5) * sin(radian);int endX = centerX + radius * cos(radian);int endY = centerY - radius * sin(radian);u8g2_DrawLine(&u8g2, startX, startY, endX, endY);u8g2_DrawLine(&u8g2, startX - 1, startY - 1, endX - 1, endY - 1);}// 计算指针的终点坐标float angle = value * 3 / 180.0;int endX = centerX + radius * cos(angle);int endY = centerY - radius * sin(angle);// 绘制指针u8g2_DrawLine(&u8g2, centerX, centerY, endX, endY);// 更新显示// u8g2_SendBuffer(&u8g2);
}相关文章:

u8g2图形库——丝滑菜单制作
目录 一、实物效果展示 二、丝滑菜单实现原理 三、代码开源 1.ui_bmp.h 2.ui.h 3.ui.c 一、实物效果展示 u8g2图形库——丝滑菜单制作 二、丝滑菜单实现原理 int ui_run(short *a,short *a_tag,uint8_t step,uint8_t slow_cnt) //UI滑动效果 {uint8_t temp;…...

Go 异常处理流程
在 Go 语言中,panic、recover 和 defer 是用于处理异常情况的关键字。它们通常一起使用来实现对程序错误的处理和恢复。 1. defer 语句 defer 用于在函数返回之前执行一段代码。被 defer 修饰的语句或函数会在包含 defer 的函数执行完毕后执行。defer 常用于资源清…...
ubuntu20.04安装tensorRT流程梳理
目标:先跑demo,再学习源码 step1, 提前准备好CUDA环境 安装CUDA,cuDNN 注意,CUDA,cuDNN需要去官网下载.run和tar文件安装,否则在下面step4 make命令会报找不到cuda等的错误,具体安装教程网上…...
数字孪生技术:提升UI交互性与个性化设计
随着数字化时代的到来,数字孪生技术正在逐渐改变我们的生活和工作方式。数字孪生是一种复制现实世界系统或实体的技术,通过创建数字模型来模拟现实世界中的各种行为和事件。这种技术不仅为人们提供了一个全新的视角来看待和解决问题,同时也为…...

外包干了5个月,技术退步明显.......
先说一下自己的情况,大专生,18年通过校招进入武汉某软件公司,干了接近4年的功能测试,今年年初,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落! 而我已经在一个企业干了四年的功能测…...
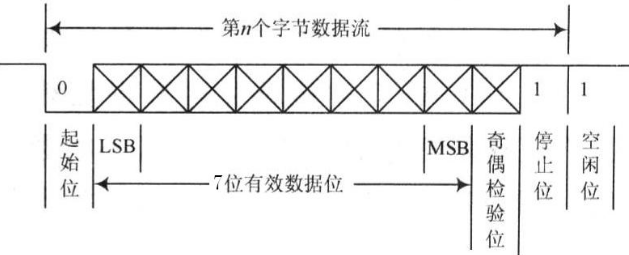
嵌入式常见的几种接口
嵌入式开发中,常见的外设通信接口/协议有SPI,I2C,UART三种,本文先分三个部分对SPI,I2C,UART进行介绍,最后对这三种协议进行比较。 1 SPI 1.1 SPI的简介 SPI(Serial Peripheral …...

基于SpringBoot+Redis的前后端分离外卖项目-苍穹外卖(七)
分页查询、删除和修改菜品 1. 菜品分页查询1.1 需求分析和设计1.1.1 产品原型1.1.2 接口设计 1.2 代码开发1.2.1 设计DTO类1.2.2 设计VO类1.2.3 Controller层1.2.4 Service层接口1.2.5 Service层实现类1.2.6 Mapper层 1.3 功能测试1.3.2 前后端联调测试 2. 删除菜品2.1 需求分析…...

Grafana采用Nginx反向代理,部分功能报错‘Origin not allowed’ behind proxy
只有部分功能会有这个提示,比如修改密码啥的,网上找了下,官方找到了答案:https://community.grafana.com/t/after-update-to-8-3-5-origin-not-allowed-behind-proxy/60598 有个回复是这样的: tl:dr: try adding prox…...

请大数据把奥威BI分析工具推给每一个财务!
这个财务指标怎么算?那些数据什么时候能拿到?看完报表,发现某部门上个月的支出涨幅过大,想了解原因怎么办?……财务人,你是不是每个月都把时间消耗在这些事情上了?那你可得快接住这个BI大数据分…...

知乎禁止转载的回答怎么复制做笔记?
问题 对于“禁止转载”的回答,右键复制是不行的,ctrl-c也不行,粘贴之后都是当前回答的标题。稍微看了代码,应该是对copy事件进行了处理。不过这样真的有用吗,真是防君子不防小人,只是给收集资料增加了许多…...

pta找鞍点—C语言
7-13 找鞍点 分数 300 全屏浏览题目 切换布局 作者 C课程组 单位 浙江大学 一个矩阵元素的“鞍点”是指该位置上的元素值在该行上最大、在该列上最小。 本题要求编写程序,求一个给定的n阶方阵的鞍点。 输入格式: 输入第一行给出一个正整数n(1…...

编程零基础算法 | 四、循环和选择结构——1572. 矩阵对角线元素的和
一、题目链接 1572. 矩阵对角线元素的和 二、题目简介 给你两个整数,n 和 start 。 数组 nums 定义为:nums[i] start 2*i(下标从 0 开始)且 n nums.length 。 请返回 nums 中所有元素按位异或(XOR)后…...
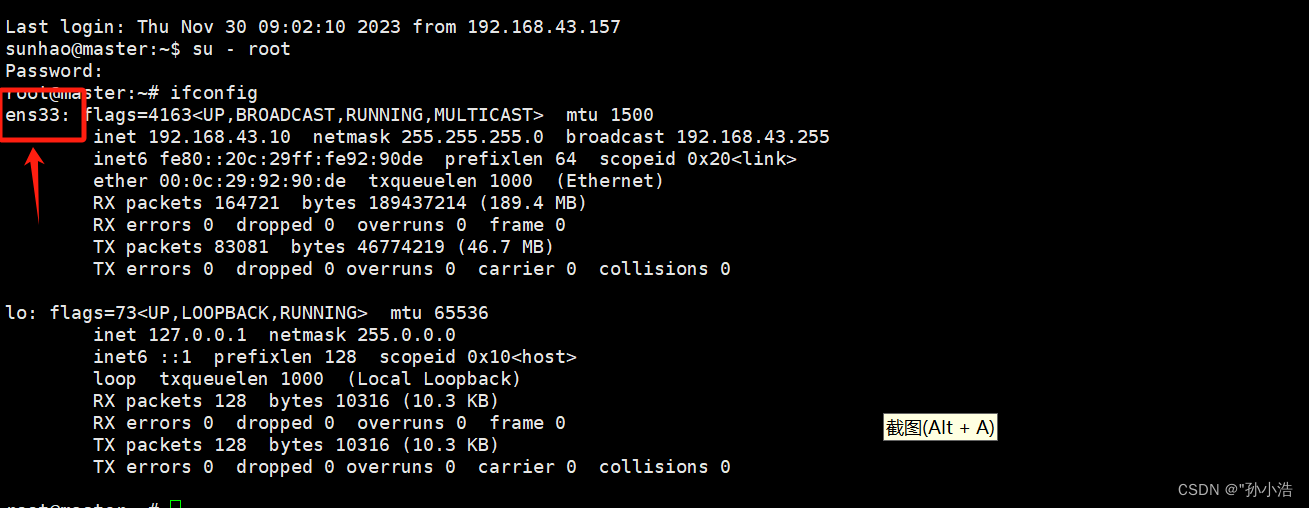
ubantu配置网卡ip
1.ifconfig查看网卡 2. vi /etc/network/interfaces auto ens33 # 网卡名 iface ens33 inet static # 注意网卡名 address 192.168.43.10 # 配置ip地址 netmask 255.255.255.0 # 掩码 gateway 192.168.43.1 # 网关 3.重启网卡 ifconfig ens33 down ifco…...

增加F110 付款方式的乱记录
随便记录一下,基本上有这些信息可以了 为了保持PRD与测试机一致的银行代码,需要先在DEV,QAS 改成4 外部给号 主要都是在FBZP 开户行维护-FI12_HBANK/FI12 S4hana 里面有的没有办法在FI12 维护只能去NWBC NWBC:维护银行账户并关联…...

软件系统安全漏洞检测应该怎么做?靠谱的软件安全检测公司推荐
软件系统安全漏洞检测是指通过对软件系统进行全面的、系统化的评估,发现和解决其中可能存在的安全漏洞和隐患。这些安全漏洞可能会被不法分子利用,引发数据泄露、系统瘫痪、信息被篡改等安全问题,给企业造成严重的经济和声誉损失。那么软件系…...
单片机学习12——电容
电容的作用: 1)降压作用: 容抗: Xc 1/2fc 串联分压原理。2100Ω的容量,50Hz的频率,可以得到1.5uF。断电之后,需要串联一个1MΩ的电阻放电。 那是不是可以使用2100欧姆的电阻来代替电容呢&am…...

淘宝平台商品详情平台订单接入说明
一 文档说明 本文档面向对象为电商平台商品详情数据和订单进行管理的第三方开发者或自研商家 二 支持范围 目前API已经支持订单的接单、取消、退单处理等操作。如果您的订单管理需求现有API不能满足,可以联系我们提出API需求。 参数说明 通用参数说明 参数不要乱…...
)
Linux文件截断命令(truncate head tail dd)
目录 一、truncate功能概述实例(可用于删除文件末尾指定大小的内容) 二、head功能概述实例(可用于删除文件末尾指定大小的内容) 三、tail功能概述:实例(可用于删除文件开头指定大小的内容) 四、…...

Armbian安装python环境和pip国内源
文章目录 安装python环境配置pip为国内源 安装python环境 更新软件包列表: sudo apt update安装 Python 3(通常是最新版本): sudo apt install python3验证 Python 安装是否成功: python3 --version运行上述命令后&…...
宿主Linux——KVM安装Windows7系统
KVM虚拟技术 KVM(Kernel-based Virtual Machine) 是基于Linux内核的开源虚拟化技术,在一台物理机上可同时运行多个虚拟系统。KVM使用硬件虚拟化扩展,例如Intel的VT和AMD的AMD-V,在性能方面更加高效,可提供更好的计算能力和响应速…...

批量图片添加随机边框工具:Windows 操作指南与场景说明
本文介绍如何在 Windows 桌面上批量为图片加边框,并重点说明「随机边框」模式与固定样式模式的差异。工具名称:【批量图片添加随机边框】。适用场景电商、社群物料需要统一「有框」观感,但不希望每张边框完全一样。文件夹内大量 JPG、PNG、GI…...

LIF蛋白的结构特征与生物学功能研究
一、LIF蛋白的分子结构与分类白血病抑制因子属于IL-6细胞因子家族,是一种多功能的糖蛋白。该蛋白由180个氨基酸残基组成,分子量约为20至25千道尔顿,包含七个α-螺旋结构域,形成典型的上束螺旋结构。LIF蛋白的基因定位于22号染色体…...

为什么要学习大模型?从新手到专家:AI大模型学习与实践完全指南
一、初聊大模型 1、什么是大模型? 大模型,通常指的是在人工智能领域中的大型预训练模型。你可以把它们想象成非常聪明的大脑,这些大脑通过阅读大量的文本、图片、声音等信息,学习到了世界的知识。这些大脑(模型&…...

千问3.5-2B在内容审核中的应用:自动识别敏感图文组合,降低人工复核成本
千问3.5-2B在内容审核中的应用:自动识别敏感图文组合,降低人工复核成本 1. 内容审核的挑战与机遇 每天,互联网上产生数以亿计的图文内容,如何高效识别其中的敏感信息成为平台运营者的重大挑战。传统人工审核方式面临三大痛点&am…...

Cursor Pro功能解锁技术解析与实战方案
Cursor Pro功能解锁技术解析与实战方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your trial request limit. / Too m…...

LH320@ACP# 规格参数解析 + 应用分享
一、产品核心定位LH320 高集成度 USB‑C PD 3.2 DP Alt‑Mode 二合一控制芯片专为Type‑C 视频转接器、多功能扩展坞设计,单芯片实现:PD 快充协议 DP 视频输出 供电管理 系统控制。二、核心参数详细解析1. 协议与标准接口:USB Type‑C 1…...

新手零基础入门:用快马ai生成你的第一个arduino流水灯程序
作为一个刚接触Arduino的新手,我最近在InsCode(快马)平台上完成了第一个LED流水灯项目。整个过程比我预想的顺利很多,特别适合零基础的朋友入门体验。下面分享我的学习过程和几点实用心得: 硬件准备其实很简单 只需要一块Arduino UNO开发板和…...

Max抢票机器人:2025终极抢票神器,让热门门票不再错过
Max抢票机器人:2025终极抢票神器,让热门门票不再错过 【免费下载链接】tix_bot Max搶票機器人(maxbot) help you quickly buy your tickets 项目地址: https://gitcode.com/gh_mirrors/ti/tix_bot 还在为抢不到演唱会门票而烦恼吗?每次…...

Nginx从专家到小白
文章目录主要用途Nginx 本地路径映射 HTTP 服务搭建文档一、环境信息二、安装步骤2.1 下载 Nginx2.2 解压安装三、配置说明3.1 配置文件路径3.2 完整配置内容3.3 配置项说明四、常用命令4.1 启动 Nginx4.2 停止 Nginx4.3 重新加载配置4.4 查看进程状态4.5 查看端口监听4.6 测试…...

Wan2.2-I2V-A14B开源镜像实测:xFormers+FlashAttention-2加速推理35%+
Wan2.2-I2V-A14B开源镜像实测:xFormersFlashAttention-2加速推理35% 1. 镜像概述与核心价值 Wan2.2-I2V-A14B是一款专为文生视频任务优化的私有部署镜像,它让高质量视频生成变得触手可及。这个镜像最吸引人的地方在于,它已经为你准备好了所…...