自动驾驶HWP 功能规范
目 录
- 概述 1
- 目的 1
- 范围 1
- 术语及缩写 1
- 设计与实验标准 1
- 设计标准 2
- 设计标准执行优先顺序 2
- 功能规范 Specification 4
- 功能描述 Functional Description 4
- 工作条件与应用范围 Application Scope 4
- 道路交通 4
- 天气与光线 4
- 传感器方案及需求 5
- 驾驶员状态监控系统 5
- 前视摄像头 5
- 雷达 5
- 地图及定位 5
- 环视系统 5
- 执行器方案及需求 6
- 纵向控制 6
- 横向控制 6
- HMI 7
- 按键方案描述 Switches 7
- 仪表显示方案描述 Cluster Displacement 7
- 文字提示 Text 13
- 功能操作方法描述 Description of functional operation methods and performance 15
- 功能开启与关闭 On / Off 15
- 功能激活 Activation 16
- 功能取消 Function Cancel 16
- 驾驶员超控 Diver override 18
- 驾驶员注意力分散 Mind-Off 18
- 其他驾驶员操作 Other behavior of the driver 19
- 功能使用场景描述 Description of Scenarios 21
- 基本场景 Basic Scenarios 21
- 边界场景 Boundary Scenarios 24
- 高风险场景 High Risk Scenarios 24
- 功能描述 Functional Description 4
- 状态机 State Machine 26
- HWP 功能逻辑状态图 State flow of HWP 26
- HWP 功能工作状态说明 State description 26
- 状态转换条件 Transition conditions 32
- 概述
-
- 目的
本文档的目的是描述先进驾驶员辅助系统域控制器( ADAS Domain Controller,ADC)系统中高速公路代驾(Highway Pilot,HWP)功能的技术规范和设计说明。
HWP 功能作为 ADC 系统所能够实现的诸多 ADAS 主动安全功能之一,其硬件实体与其他功能共用,故 ADC 实体参数与性能有专门说明,不在此文档的讨论范围之内。
-
- 范围
本文档适用于 ADC 系统中 HWP 功能的整个生命周期。
-
- 术语及缩写
| 序号 | 术语或缩写 | 描述 |
| 1. | ADC | ADAS Domain Controller 先进驾驶员辅助系统域控制器 |
| 2. | HWP | Highway Pilot 高速公路代驾 |
| 3. | ADAS | Advanced Driver Assist System 先进驾驶员辅助系统 |
| 4. | ISO | International Organization for Standardization 国际标准化组织 |
| 5. | Euro NCAP | European New Car Assessment Programme 欧洲新车评价体系 |
| 6. | SAE | Society of Automotive Engineers 美国汽车工程师协会 |
| 7. | EMS | Engine Management System 发动机管理系统 |
| 8. | HCU | Hybrid Control Unit 混合动力控制器 |
| 9. | VCU | Vehicle Control Unit 新能源汽车整车控制器 |
| 10. | ESC | Electronic Stability Control 车身电子稳定系统 |
| 11. | EPS | Electronic Power Steering 电子助力转向 |
| 12. | CAN | Controller Area Network 控制器区域网 |
| 13. | TCS | Traction Control System 牵引控制系统 |
| 14. | ABS | Antilock Brake System 制动防抱死系统 |
| 15. | EPB | Electrical Park Brake 电子驻车制动系统 |
| 16. | ACC | Adaptive Cruise Control 自适应巡航控制 |
| 17. | HMI | Human Machine Interface 人机交互界面 |
| 18. | YRS | Yaw Rate Sensor 横摆角速度传感器 |
| 19. | SAS | Steering wheel Angle Sensor 方向盘转角传感器 |
-
-
- 设计标准
-
设计标准-非法规类
TBD
设计标准-法规类
| 序号 | 类别 | 名称 | 发布日期 |
| 1 | ISO | ISO 15622-2010:Intelligent transport systems — Cruise Control systems —Performance requirements and test procedures | 2010-04-15 |
| 2 | ISO | ISO 22179-2009:Intelligent transport systems — Full speed range adaptive cruise control (FSRA) systems — Performance requirements and test procedures | 2009-09-01 |
| 3 | ISO | ISO 11270-2014:Intelligent transport systems — Lane keeping assistance systems (LCAS) — Performance requirements and test procedures | 2014-05-15 |
| 4 | GB | GB 20608-2006:智能运输系统——自适应巡航控制系统性能要求 与检测方法 | 2006-11-07 |
| 5 | GB | GB5768:道路交通标志和标线——道路交通标线 | 2009-05-25 |
| 6 | GB | GB26773:智能运输系统—车道偏离报警系统性能要求与检测方法 | 2011-07-20 |
| 7 | Euro NCAP | Euro NCAP Test Protocol –Lane Support Systems v2.0.1 | 2017-11 |
| 8 | SAE | SAE J3016: Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles | 2018-06-15 |
-
-
- 设计标准执行优先顺序
-
如无特殊说明,全球范围内通行的零件和车辆的标准和法规均适用于本功能的设计限制,即使没有在本文件中明确指出,各国政府发布的要求均应在设计中得到满足。对于某些特殊的国家要求,可以根据具体的采购订单或工程图纸得到部分豁免。
-
-
-
- 中国国家标准(GB)
-
-
GB 20608-2006:智能运输系统——自适应巡航控制系统性能要求与检测方法
GB26773:智能运输系统—车道偏离报警系统性能要求与检测方法GB5768:道路交通标志和标线——道路交通标线
-
-
-
- 国际标准化组织标准(ISO)
-
-
ISO 15622-2010 : Intelligent transport systems — Cruise Control systems
—Performance requirements and test procedures
ISO 22179-2009:Intelligent transport systems — Full speed range adaptive cruise control (FSRA) systems — Performance requirements and test procedures
ISO 11270-2014 : Intelligent transport systems — Lane keeping assistance systems (LCAS) — Performance requirements and test procedures
-
-
-
- 欧洲新车评价体系(Euro NCAP)
-
-
European New Car Assessment Programme (EuroNCAP): Test Protocol
–Lane Support Systems v2.0.1, 2017.11
-
-
-
- 美国汽车工程师协会(SAE)
-
-
SAE J3016: Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles, 2018-06-15
-
- 功能描述 Functional Description
高速公路代驾(Highway Pilot, HWP)功能可以根据车辆行驶方向的交通情况,在纵向上自动控制车辆加速与减速,在横向上自动将车辆保持在其行驶路径上。在 HWP 功能正常作用且并未发出接管报警时,驾驶员无需介入车辆控制, 只要保持适度的注意力在行车环境的监控上即可。当 HWP 功能判断道路环境或自车状态超出系统能力时发出接管报警,此时需要驾驶员即刻进行监测并接管控制。若系统发出报警,但驾驶员长时间未介入检测或控制,HWP 功能将会控制车辆逐渐停止在其行驶车道中。
-
-
- 工作条件与应用范围 Application Scope
-
| 项目 | 设定值 | 备注 |
| 工作车速范围 | ||
| 最大起效车速 | ||
| 最大失效车速 | ||
| 最大设定巡航车速 | ||
| 最小转弯半径 | ||
| 跟车时距 | ||
| 工作温度 |
-
-
- 道路交通
-
HWP 功能仅针对高度结构化道路设计,限制使用环境为严格限制出入、有明确的隔离设置区分对向交通、无立体或水平交叉路口、无交通灯等设施的高速公路或城市快速路(不包含出、入匝道功能);
HWP 功能能够识别可以依法取得牌照,合法上高速公路行驶的普通乘用车、商用车等车辆目标;对于其他类型的障碍物,HWP 功能会尽可能的按照安全性策略进行规避并发出警报,但受限于车载感知能力,对于无法识别(路面坑洼等)、近距离识别(石块、临时施工等)或突发情况(山区落石等),HWP 功能仍存在无响应或响应不及时的风险。
需要完整版功能规范请私信。
相关文章:

自动驾驶HWP 功能规范
目 录 概述 1 目的 1范围 1术语及缩写 1设计与实验标准 1 设计标准 2设计标准执行优先顺序 2功能规范 Specification 4 功能描述 Functional Description 4 工作条件与应用范围 Application Scope 4道路交通 4天气与光线 4传感器方案及需求 5 驾驶员状态监控系统 5前视摄像…...

Ubuntu 环境下 NFS 服务安装及配置使用
需求:公司内部有多台物理服务器,需要A服务器上的文件让B服务器访问,也就是两台服务器共享文件,当然也可以对A服务器上的文件做权限管理,让B服务器只读或者可读可写 1、NFS 介绍 NFS 是 Network FileSystem 的缩写&…...
vue.js如何根据后台返回来的图片url进行图片下载
原创/朱季谦 最近在做一个前端vue.js对接的功能模块时,需要实现一个下载图片的功能,后台返回来的是一串图片url,试了很多种方法,发现点击下载时出来的效果,都是跳到一个新的图片网页,后来经过一番琢磨&…...

获取WordPress分类链接
CMS模板主题首页多以分类列表的形式展示内容,一般需要在适当位置添加某分类归档页面链接的按钮,下面的代码可以帮你实现。 代码一、通过分类别名获取Wordpress分类链接: <?php $catget_category_by_slug(‘wordpress’); $cat_linksget_…...
<Linux>(极简关键、省时省力)《Linux操作系统原理分析之Linux 进程管理 5》(9)
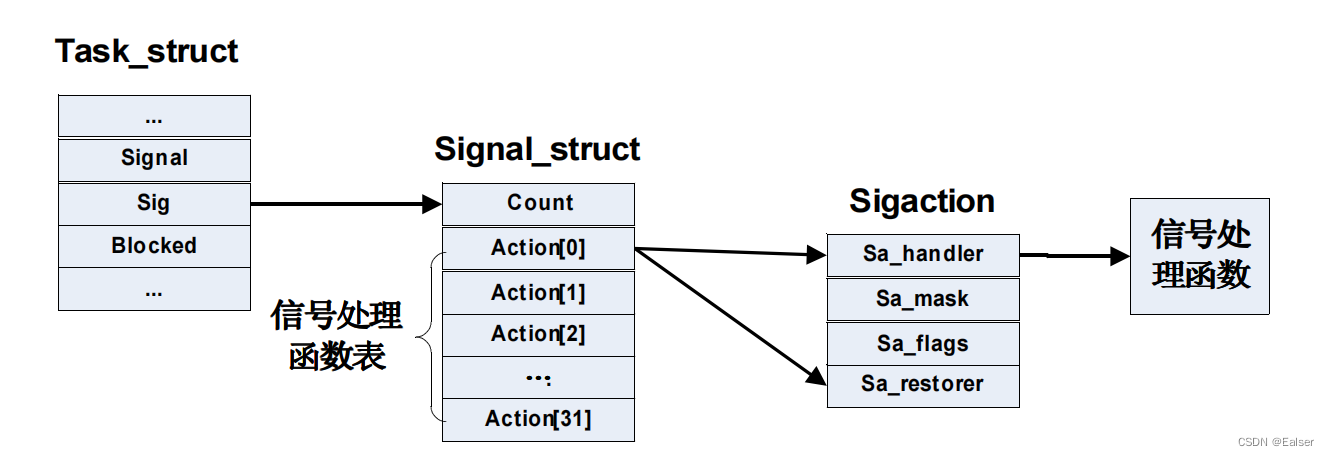
《Linux操作系统原理分析之Linux 进程管理 5》(9) 4 Linux 进程管理4.5 Linux 信号4.5.1 信号的作用和种类1.信号机制2.信号种类 4.5.2 信号的处理4.5.3 信号处理函数1.数据结构2. 处理函数 signal3.程序例 4 Linux 进…...

Anthropic推出Claude 2.1聊天机器人;使用AI工具写作:挑战与策略
🦉 AI新闻 🚀 Anthropic推出Claude 2.1聊天机器人,支持20万个Token输入和提高准确度 摘要:Anthropic推出了Claude 2.1聊天机器人及对应的AI模型,支持输入多达20万个Token,并在准确度上有所改善。Claude已…...

2023-11-30 LeetCode每日一题(确定两个字符串是否接近)
2023-11-30每日一题 一、题目编号 1657. 确定两个字符串是否接近二、题目链接 点击跳转到题目位置 三、题目描述 如果可以使用以下操作从一个字符串得到另一个字符串,则认为两个字符串 接近 : 操作 1:交换任意两个 现有 字符。 例如&…...
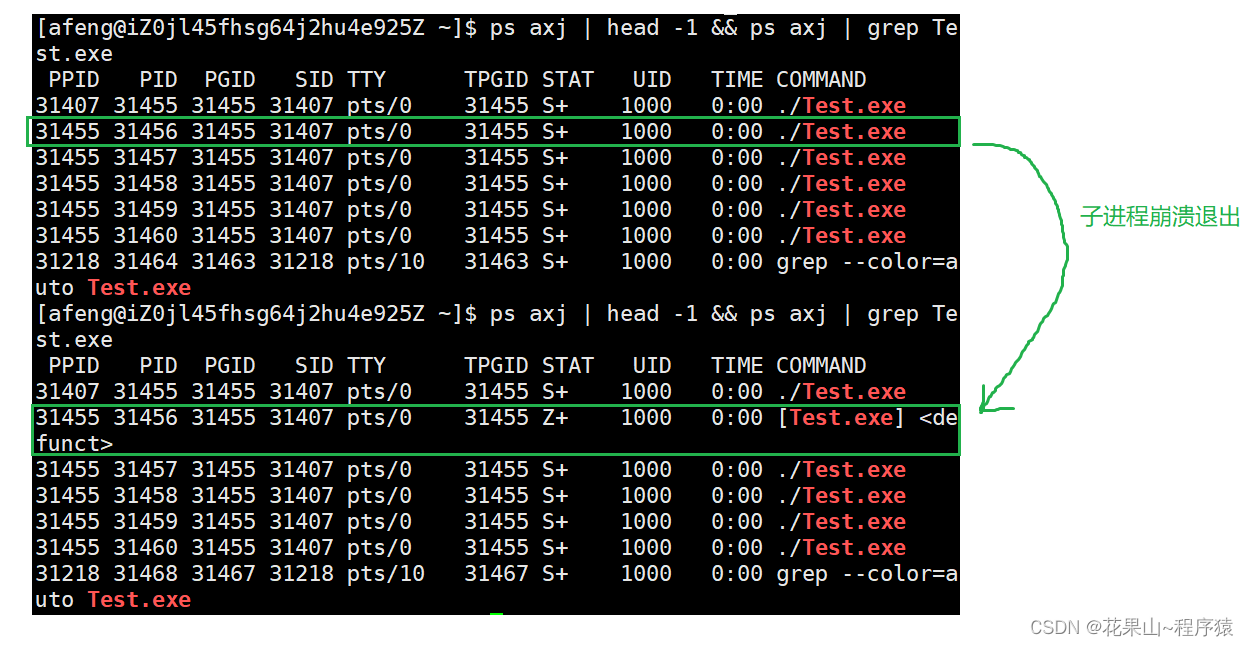
进程间通信基础知识【Linux】——上篇
目录 一,理解进程之间的通信 1. 进程间通信目的 2. 进程间通信的技术背景 3,常见的进程间通信 二,管道 1. 尝试建立一个管道 管道的特点: 管道提供的访问控制: 2. 扩展:进程池 阶段一:…...
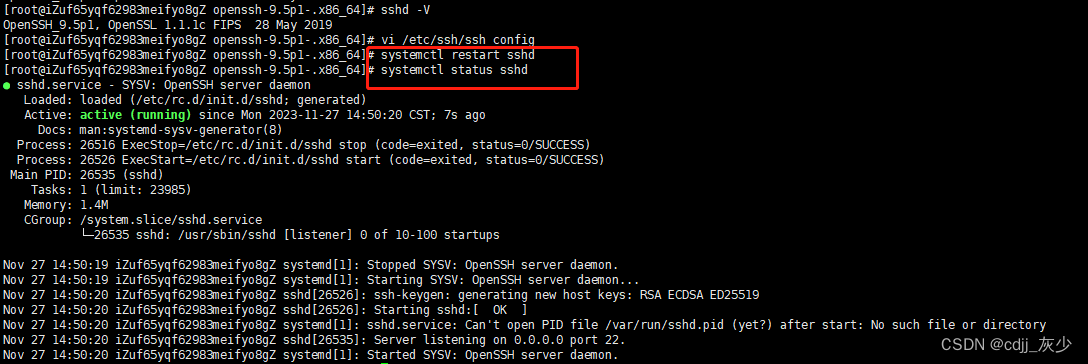
OpenSSH(CVE-2023-38408)OpenSsh9.5一键升级修复
yum install -y git cd /root git clone https://gitee.com/qqmiller/openssh-9.5p1-.x86_64.git cd openssh-9.5p1-.x86_64/ bash openssh_update.sh重启sshd: systemctl restart sshd 查看sshd状态: systemctl status sshd 重要的是按此操作升级完成…...

10.30 作业 C++
设计一个Per类,类中包含私有成员:姓名、年龄、指针成员身高、体重,再设计一个Stu类,类中包含私有成员:成绩、Per类对象p1,设计这两个类的构造函数、析构函数和拷贝构造函数。 #include <iostream>using namespace std;clas…...
Python开发运维:PyMongo 连接操作 MongoDB
目录 一、理论 1.PyMongo模块 2.Mongo Shell 二、实验 1. Windows11安装MongoDB 7.0.4 2.Windows11安装MongoDB Shell 2.1.0 3.PyMongo 连接 MongoDB(无密码方式) 4.PyMongo 连接 MongoDB(有密码方式) 5.PyMongo 操作 Mo…...

【Github】本地管理github分支
本地管理github分支 学习一些开发tips。以下是万能的GPT教我的: 以下是一套基本的本地管理 GitHub 仓库的指令集。在执行这些指令之前,请确保已经在你的本地机器上安装了 Git 工具,并且已经在 GitHub 上创建了一个仓库。 克隆仓库࿱…...
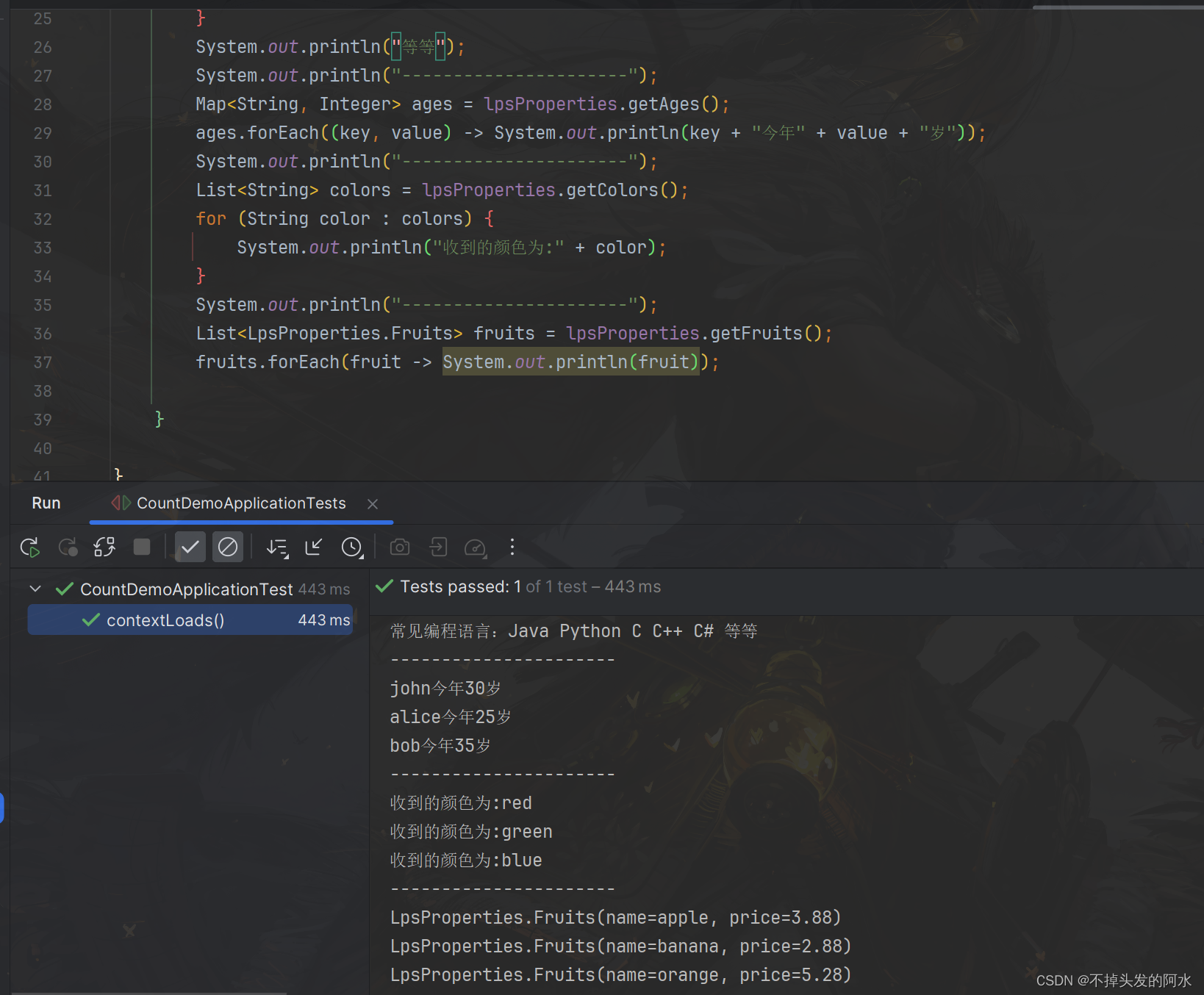
Spring Boot 项目中读取 YAML 文件中的数组、集合和 HashMap
在 Spring Boot 项目中,我们经常使用 YAML 文件来配置应用程序的属性。在这篇博客中,我将模拟如何在 Java 的 Spring Boot 项目中读取 YAML 文件中的数组、集合和 HashMap。 1. 介绍 YAML(YAML Aint Markup Language)是一种人类…...

Python正则表达式:match()和search()函数全面解读
更多资料获取 📚 个人网站:ipengtao.com 在Python中,正则表达式是强大的工具,能够用于文本匹配、搜索和替换。re模块提供了许多函数来处理正则表达式,其中match()和search()是两个常用的函数。本文将深入探讨这两个函…...

AIGC ChatGPT4总结Linux Shell命令集合
在Linux中,Shell命令的数量非常庞大,因为Linux提供了各种各样的命令来处理系统任务。这些命令包括GNU核心工具集、系统命令、shell内置命令以及通过安装获得的第三方应用程序命令。以下是一些常见的Linux命令分类及其示例,但请注意,这不是一个全面的列表,因为列出所有命令…...

力扣labuladong——一刷day61
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、力扣865. 具有所有最深节点的最小子树二、力扣1123. 最深叶节点的最近公共祖先三、力扣1026. 节点与其祖先之间的最大差值四、力扣1120. 子树的最大平均值 …...
nacos配置变更导致logback日志异常
问题背景: 线上的服务突然内存爆满,查服务器突然发现,日志全部打印到了/tmp/tomcat.xxx.port目录下,后来对应操作时间,和nacos修改配置是同一时间发生的,但是疑惑的点是,nacos配置变更为什么会引起logback的…...
【spring(五)】SpringMvc总结 SSM整合流程
目录 一、SpringMVC简介: 二、SpringMVC快速入门: 三、SpringMVC bean的管理:⭐ ①配置bean ②扫描bean 四、SpringMVC配置类:⭐ 五、SpringMVC 请求与响应 六、SpringMVC REST风格 七、SSM整合 异常处理: 八、…...
1、windows10系统下Qt5.12.0与卸载
一、安装包下载 1、Qt社区下载 https://download.qt.io/archive/qt/5.12/5.12.10/qt-opensource-windows-x86-5.12.10.exe 2、百度网盘下载 链接:百度网盘 请输入提取码 3、Qt官网下载: Try Qt | 开发应用程序和嵌入式系统 | Qt 二、安装提示 下…...
WebGL/threeJS面试题扫描与总结
什么是 WebGL?什么是 Three.js?请解释three.js中的WebGL和Canvas的区别? WebGL(全写Web Graphics Library)是一种3D绘图协议,这种绘图技术标准允许把JavaScript和OpenGL ES 2.0结合在一起,通过增加OpenGL ES 2.0的一个…...

PICO Unity APK闪退的五大根因与工程化排查指南
1. 为什么PICO项目打包APK后“秒退”不是玄学,而是可定位的工程链路断裂 “Unity打包PICO APK闪退”——这六个字在XR开发群、技术论坛和外包项目交接现场出现的频率,几乎和“黑屏”“白屏”“加载失败”并列成为移动端开发三大幽灵问题。我接手过27个P…...

诈骗分子利用微软内部账户发垃圾链接,微软能否解决安全漏洞?
诈骗事件曝光 几个月来,诈骗分子利用漏洞,从微软内部通常用于发送合法账户提醒的电子邮件地址发送垃圾邮件。目前不清楚他们如何利用系统,但能像新客户一样创建新微软账户,并以微软名义发邮件,易让人们误以为邮件真实。…...
:谷歌内部技术白皮书级拆解)
Gemini深度研究模式全解析(2024最新版API+多模态检索内参):谷歌内部技术白皮书级拆解
更多请点击: https://codechina.net 第一章:Gemini深度研究模式的核心定位与演进脉络 Gemini深度研究模式并非单纯的功能叠加,而是Google面向复杂知识工作场景构建的推理范式跃迁。它将多跳检索、跨模态证据聚合与可验证推理链生成深度融合&…...

高效突破小红书反爬:7个实用User-Agent伪装技巧与实战指南
高效突破小红书反爬:7个实用User-Agent伪装技巧与实战指南 【免费下载链接】XHS-Downloader 小红书(XiaoHongShu、RedNote)链接提取/作品采集工具:提取账号发布、收藏、点赞、专辑作品链接;提取搜索结果作品、用户链接…...

Java中的Comparator 和JS中的回调函数好相似
Comparator 在 Java 中的地位,非常像 JavaScript 中 Array.prototype.sort() 那个接收的 回调函数 (Comparison Function)。1. Comparator 是什么?在 Java 中,Comparator 是一个接口,它的核心作用是定义“比较逻辑”。在 Java 8 之…...

3小时从零掌握:通达信缠论量化插件终极实战指南 [特殊字符]
3小时从零掌握:通达信缠论量化插件终极实战指南 🚀 【免费下载链接】Indicator 通达信缠论可视化分析插件 项目地址: https://gitcode.com/gh_mirrors/ind/Indicator 通达信缠论量化插件是一款革命性的技术分析工具,专为股票投资者打造…...

从‘黑客工具’到‘运维神器’:我是如何在Linux日常运维中用Netcat替代Telnet和Nmap的
从‘黑客工具’到‘运维神器’:Netcat在Linux日常运维中的五大实战场景如果你在运维领域摸爬滚打多年,一定遇到过这样的窘境:需要快速检查某个服务端口是否开放,却发现telnet没安装;想扫描几个常用端口,nma…...

VSCode R语言扩展:终极完整指南 - 从零构建专业数据分析环境
VSCode R语言扩展:终极完整指南 - 从零构建专业数据分析环境 【免费下载链接】vscode-R R Extension for Visual Studio Code 项目地址: https://gitcode.com/gh_mirrors/vs/vscode-R 想要在VSCode中高效进行R语言开发吗?vscode-R扩展为您提供了完…...

AppImageLauncher:Linux桌面应用的3分钟智能管家
AppImageLauncher:Linux桌面应用的3分钟智能管家 【免费下载链接】AppImageLauncher Helper application for Linux distributions serving as a kind of "entry point" for running and integrating AppImages 项目地址: https://gitcode.com/gh_mirro…...

如何快速掌握XELFViewer:Linux二进制文件分析的终极指南
如何快速掌握XELFViewer:Linux二进制文件分析的终极指南 【免费下载链接】XELFViewer ELF file viewer/editor for Windows, Linux and MacOS. 项目地址: https://gitcode.com/gh_mirrors/xe/XELFViewer 你是否曾面对复杂的Linux可执行文件感到无从下手&…...