【古月居《ros入门21讲》学习笔记】09_订阅者Subscriber的编程实现
目录
说明:
1. 话题模型
图示
说明
2. 实现过程(C++)
创建订阅者代码(C++)
配置发布者代码编译规则
编译并运行
编译
运行
3. 实现过程(Python)
创建订阅者代码(Python)
运行效果
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第9节,对应视频课程的第11节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
1. 话题模型
图示
说明
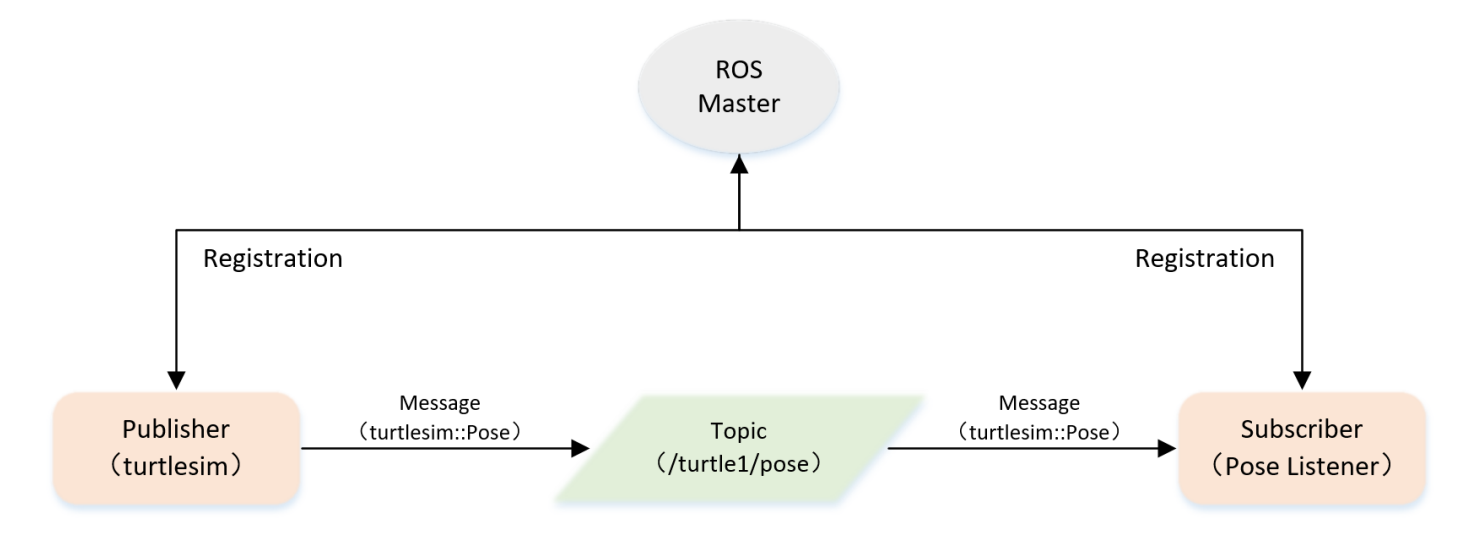
ROS Master:管理所有节点
主要节点:
Publisher(turtlesim): 消息的发布者,后面会通过程序(c++,py)实现发布者发布一个位置消息数据;
Message(turtlesim::Pose): 发布者发布的消息数据,Pose为位置消息数据;
Topic(/turtle1/pose): 消息传输管道,将发布者发布的消息数据传输给订阅者,
让Subscriber(Pose Listener)订阅者得到这个消息数据;
Subscriber(Pose Listener): 消息的订阅者,Subscriber(Pose Listener)接收到通过
Topic(/turtle1/pose)传输来的消息数据Message(turtlesim::Pose)。
2. 实现过程(C++)
创建订阅者代码(C++)
cd ~/catkin_ws/src/learning_topic/src touch pose_subscriber.cpp
初始化ROS节点;
订阅需要的话题;
循环等待话题消息,接收到消息后进入回调函数;
在回调函数中完成消息处理。
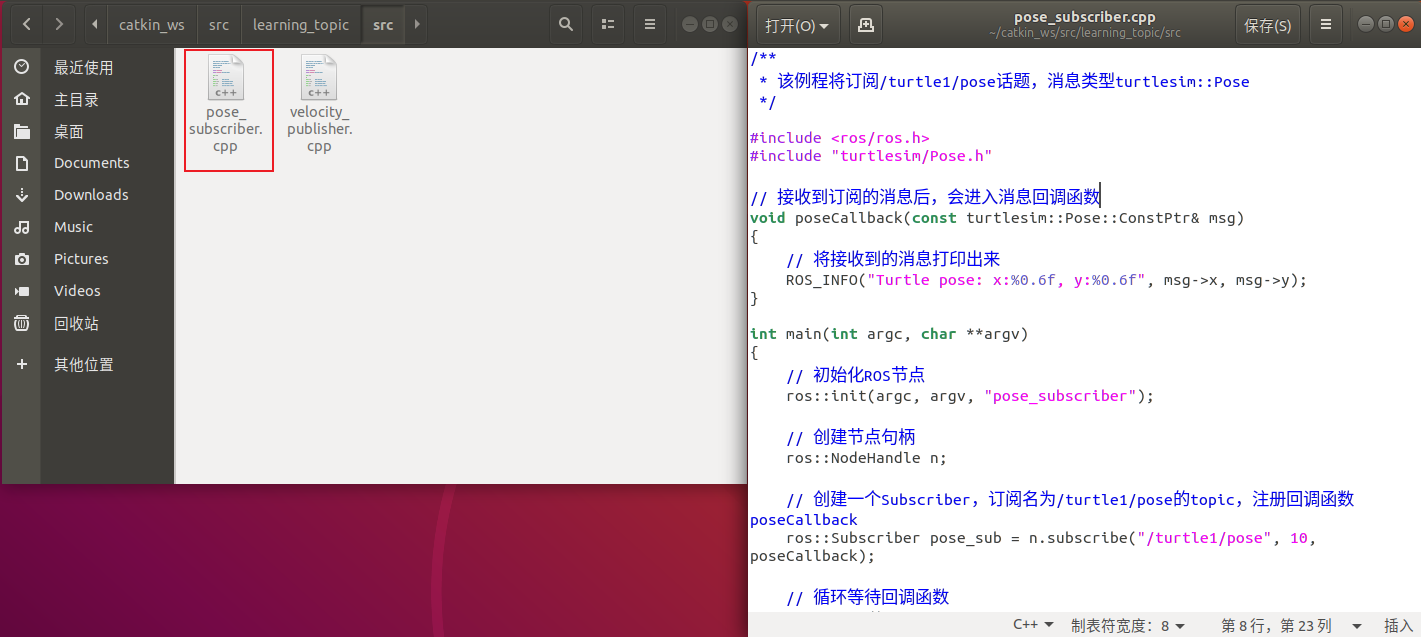
/*** 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose*/#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{// 将接收到的消息打印出来ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{// 初始化ROS节点ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄ros::NodeHandle n;
// 定义一个名为turtle_vel_pub的Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallbackros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数ros::spin();
return 0;
}第(1)步:切换工作路径到~/catkin_ws/srclearning_topic/src目录下
第(2)步:创建代码文件pose_subscriber.cpp;
第(3)步:复制代码到文件中并保存,
配置发布者代码编译规则
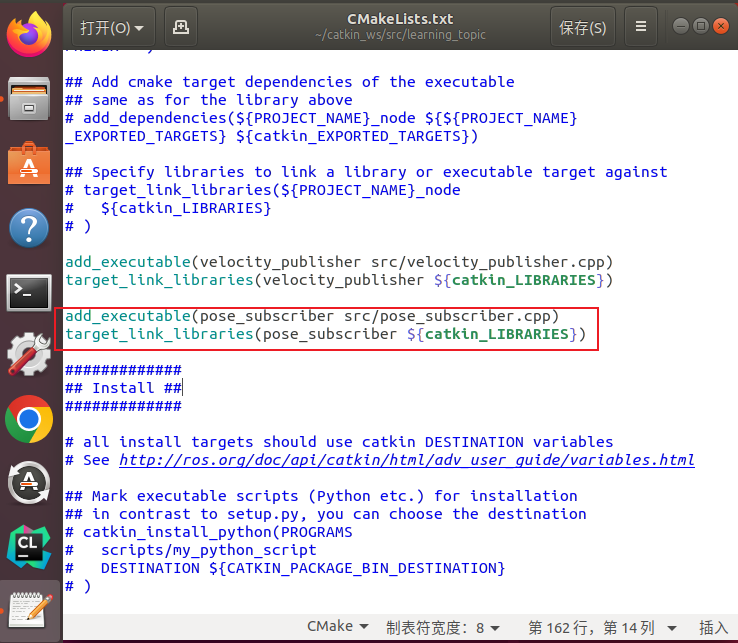
将下面两行代码复制到CMakeLists.txt文件中,
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
上面两行代码的作用:
add_executable:将pose_subscriber.cpp代码文件编译成(pose_subscriber可执行文件;
target_link_libraries:把编译生成的可执行文件pose_subscriber跟ROS相关的一些库做连接的,比如调用的C++的接口。
复制到CMakeLists.txt文件中的位置如下:
编译并运行
编译
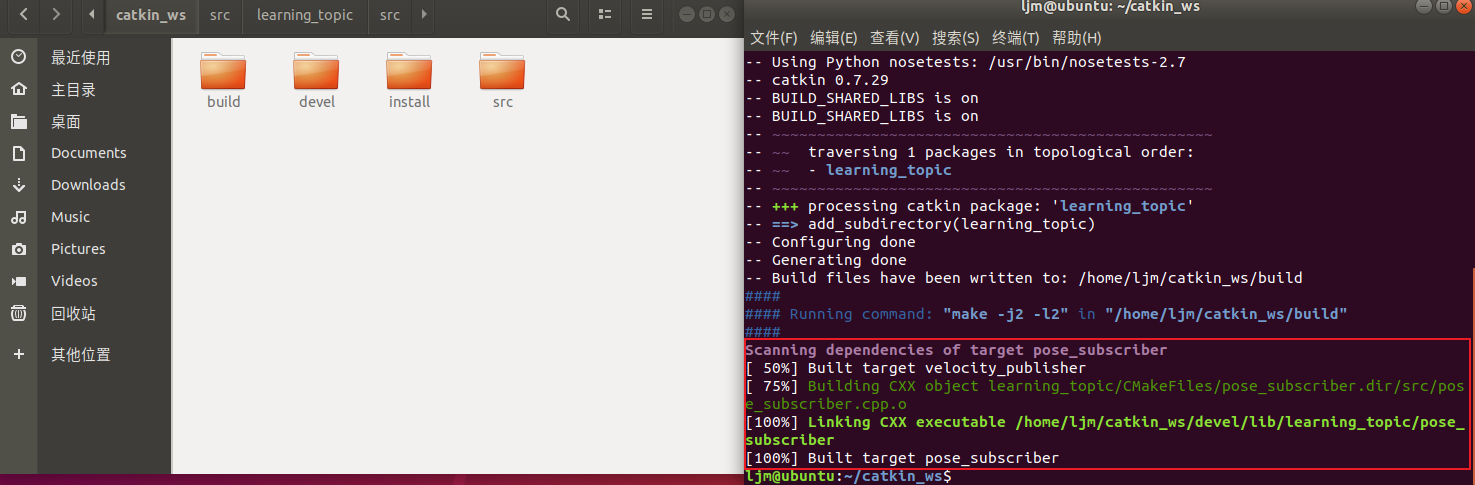
cd ~/catkin_ws catkin_make
第一步:先把工作路径切换到catkin_ws工作空间目录下;
第二步:在catkin_ws工作空间目录下catkin_make编译代码文件
运行
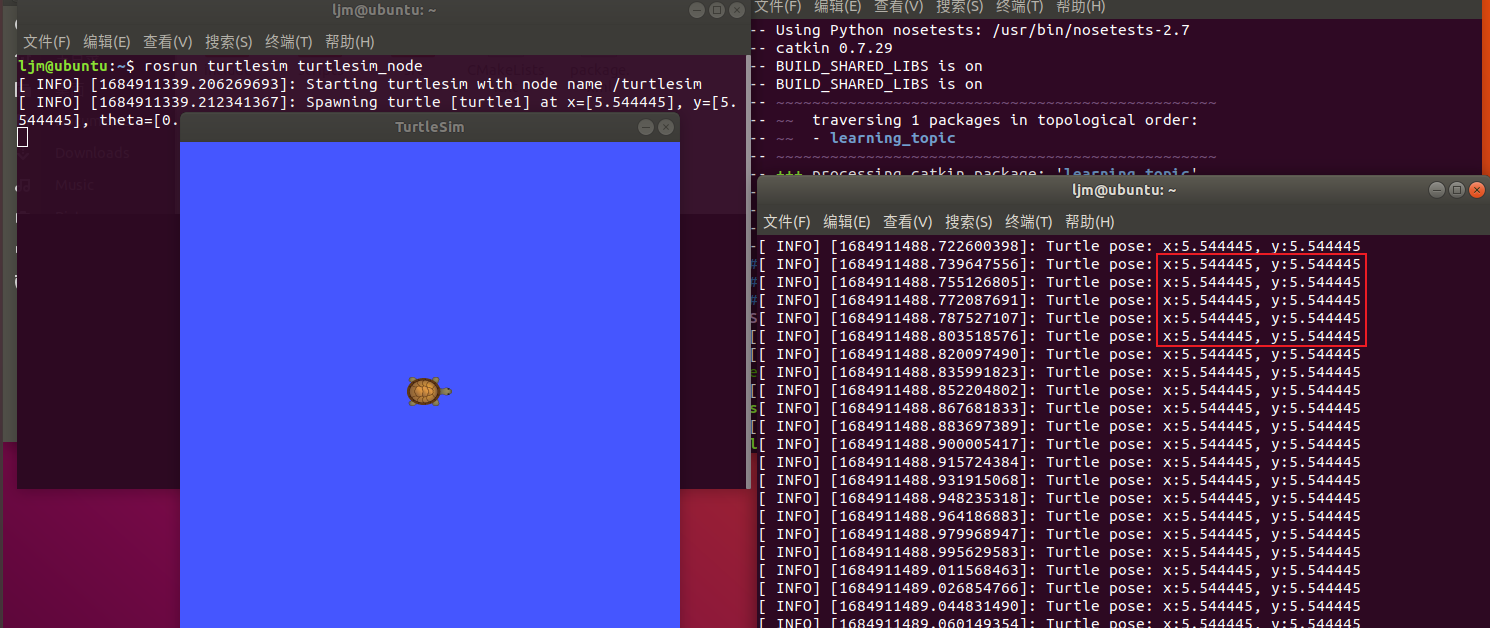
roscore rosrun turtlesim turtlesim_node rosrun learning_topic pose_subscriber
第一步:打开ROS Master,打开一个新终端输入:roscore;
第二步:运行海龟仿真器,再打开一个新终端输入:rosrun turtlesim turtlesim_node;
第三步:运行我们编译好的可执行文件,再打开一个新终端输入:rosrun learning_topic pose_subscriber,
这个程序会不断的发布海龟的当前位置(x,y坐标)。
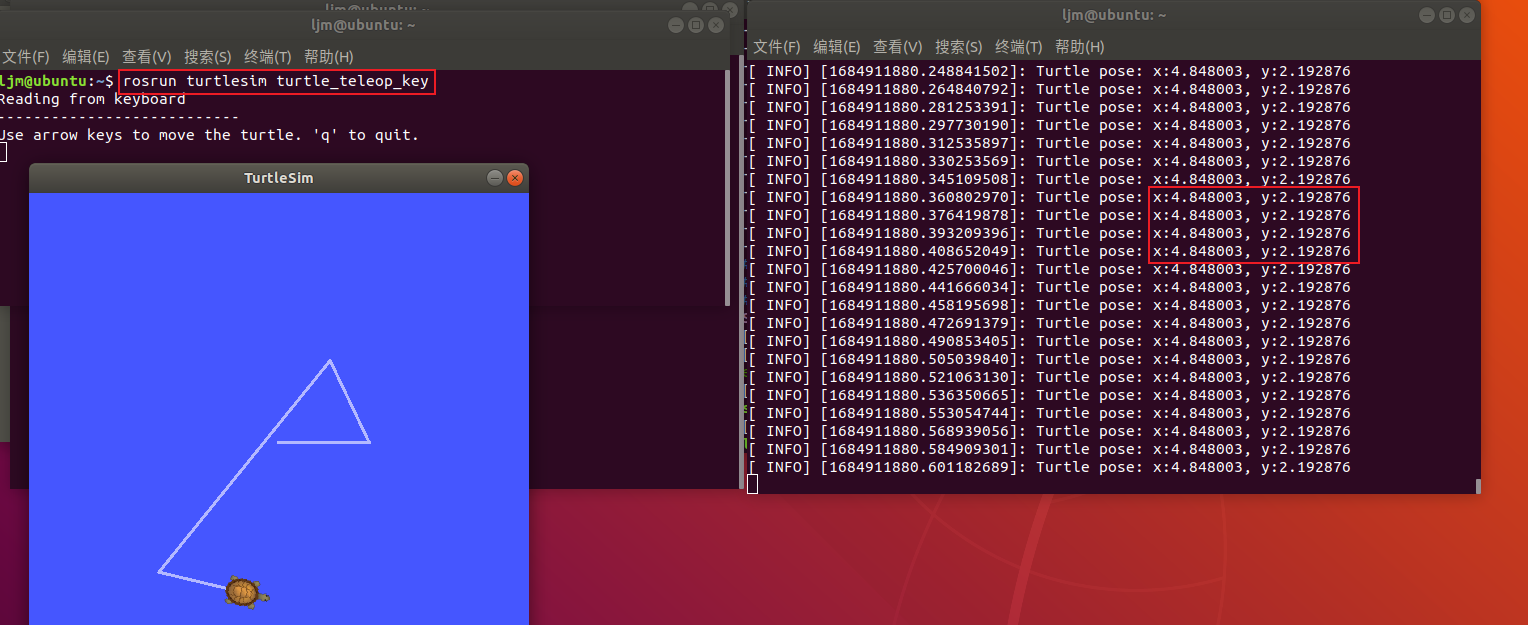
如果我们让海龟动起来,就可以看到海龟当前位置的变化效果,我们可以通过程序或者海龟的键盘控制节点让海龟动起来,
下面为海龟的键盘控制节点方式,
打开一个新终端输入:rosrun turtlesim turtle_teleop_key
我们上面运行的可执行文件的位置在 home/catkin_ws/devel/lib/learning_topic 目录下
3. 实现过程(Python)
创建订阅者代码(Python)
cd ~/catkin_ws/src/learning_topic/scripts touch pose_subscriber.py
第一步:先把工作路径切换到~/catkin_ws/src/learning_topic/scripts目录下;
第二步:在scripts文件夹下创建pose_subscriber.py文件;
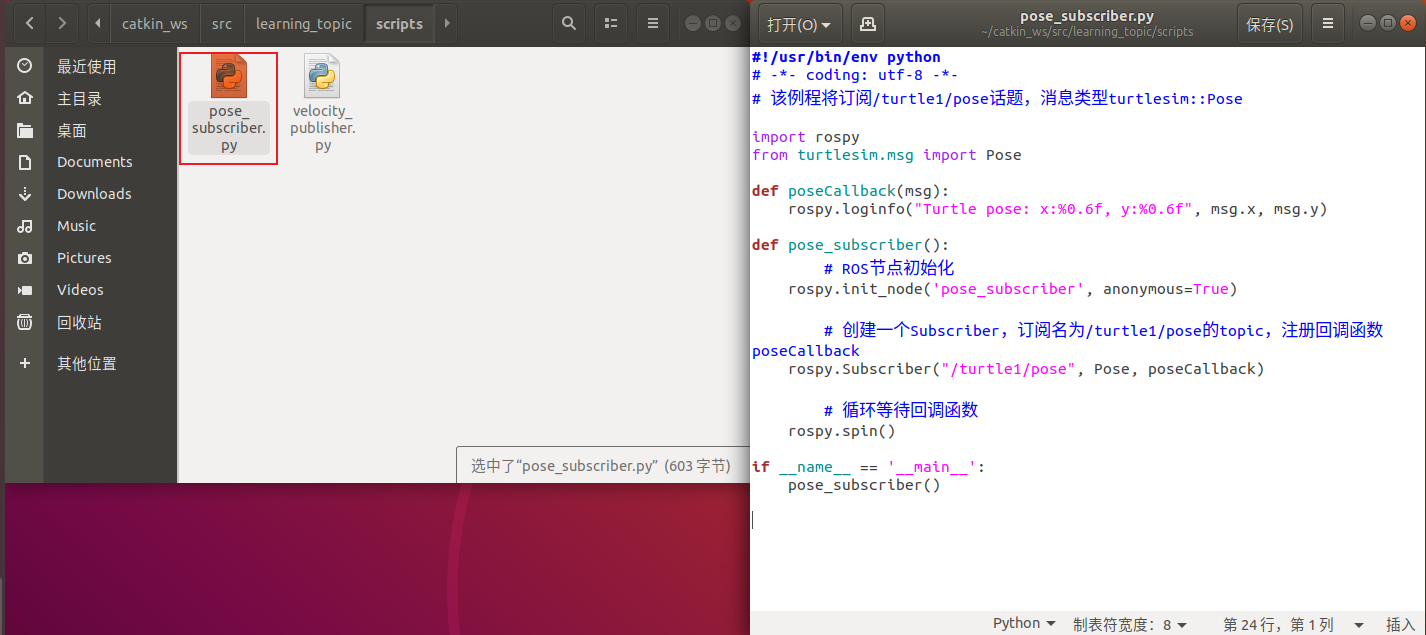
第三步:双击打开pose_subscriber.py文件,复制代码到里面并保存
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():# ROS节点初始化rospy.init_node('pose_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallbackrospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# 循环等待回调函数rospy.spin()
if __name__ == '__main__':pose_subscriber()
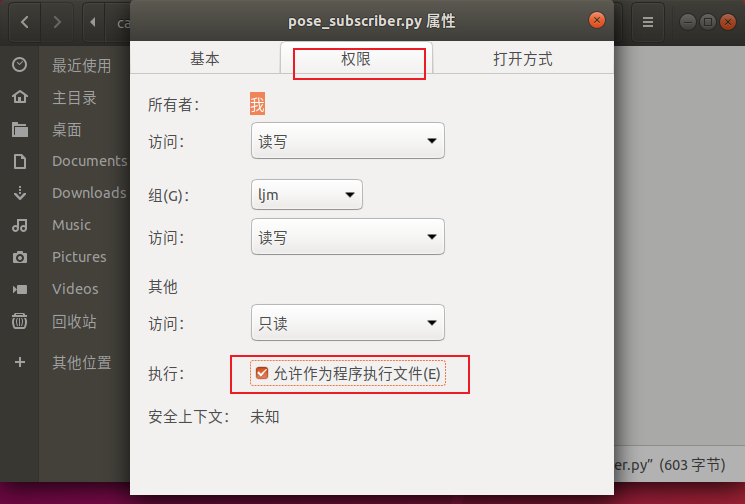
注意:给pose_subscriber.py文件赋予作为程序文件执行的权限,
点击pose_subscriber.py文件,右键,属性,权限,勾选(允许作为程序文件执行),
python文件不需要编译,直接运行即可。
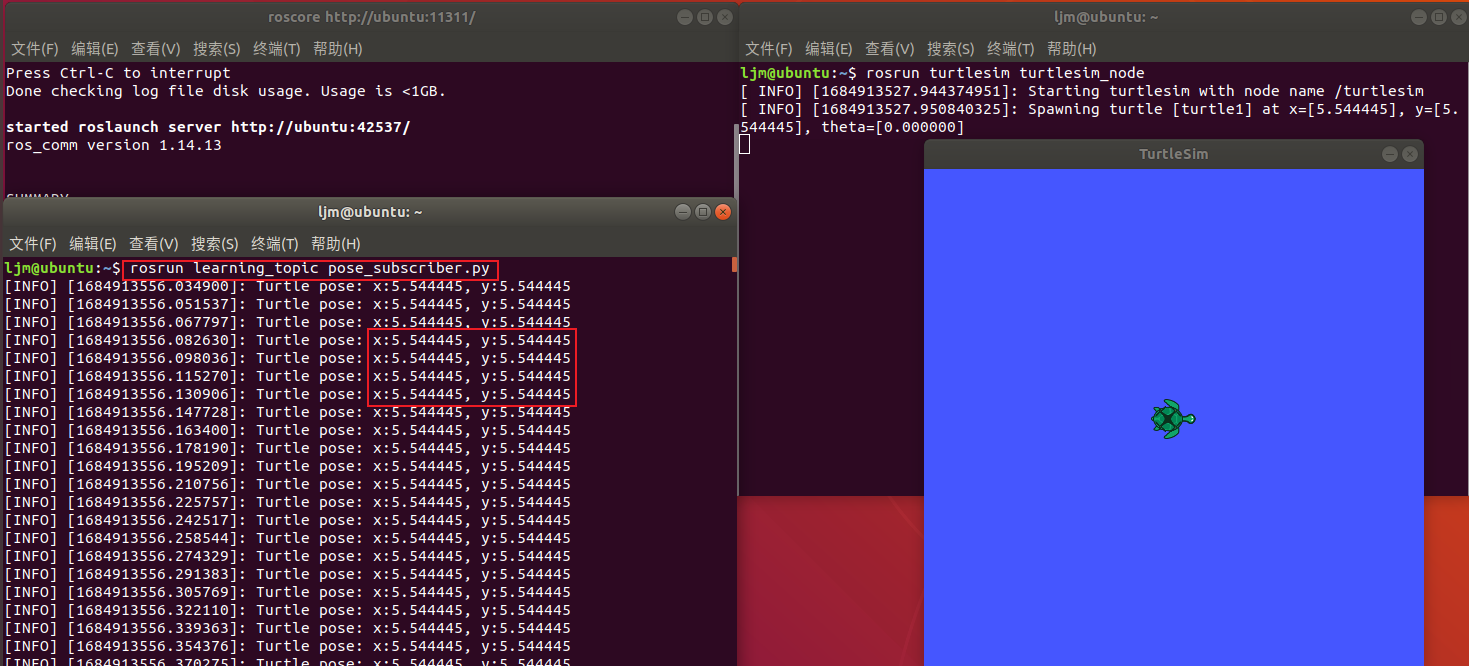
运行效果
运行pose_subscriber.py文件,流程和上面一样,
roscore rosrun turtlesim turtlesim_node rosrun learning_topic pose_subscriber.py
相关文章:
【古月居《ros入门21讲》学习笔记】09_订阅者Subscriber的编程实现
目录 说明: 1. 话题模型 图示 说明 2. 实现过程(C) 创建订阅者代码(C) 配置发布者代码编译规则 编译并运行 编译 运行 3. 实现过程(Python) 创建订阅者代码(Python&…...
Java全栈基础篇--集合
集合 集合:集合是java中提供的一种容器,可以用来存储多个数据。 特点: 长度不固定,还可以存储不同的数据(但是一般都用同一类型) 集合和数组既然都是容器,它们有啥区别呢? 数组的长…...
Facebook公共主页受限、被封?一文教你排雷解决
一、Facebook公共主页是什么? 现在人们的生活已经离不开各种社交媒体,只要有智能手机,或多或少会使用一些社交平台,而Facebook是一个拥有大量用户的社交平台。这对于各种企业而言,也是一个十分优秀的营销平台…...
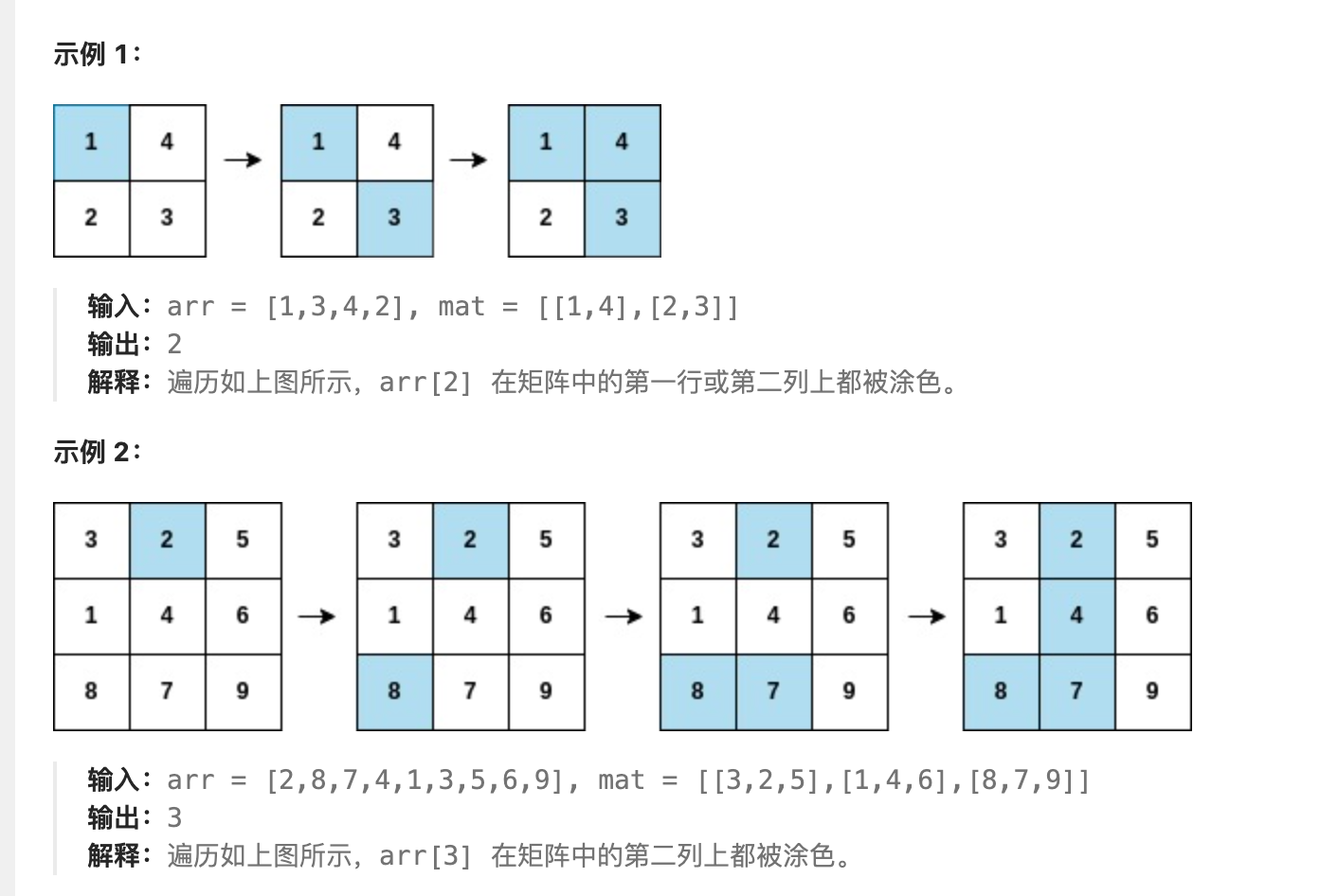
Day04:每日一题:2661. 找出叠涂元素
2661. 找出叠涂元素 给你一个下标从 0 开始的整数数组 arr 和一个 m x n 的整数 矩阵 mat 。 arr 和 mat 都包含范围 [1,m * n] 内的 所有 整数。从下标 0 开始遍历 arr 中的每个下标 i ,并将包含整数 arr[i] 的 mat 单元格涂色。请你找出 arr 中在 mat…...

SpringBoot 整合Redis
在Spring Boot中,你可以使用以下注解来实现Redis的整合: EnableCaching: 在启动类上添加该注解,开启Spring的缓存支持。 Cacheable: 标记方法的返回值可被缓存。当缓存中存在相同 key 的数据时,直接从缓存中获取数据,否则执行方法…...

tensorflow-gpu1.15 + win11 + RTX 4050环境配置
组了一套,不知道行不行 windows11GPURTX 4050python3.7.12tensorflow-gpu1.15.0cudatoolkit10.0.130cudnn7.6.5Keras2.3.1...
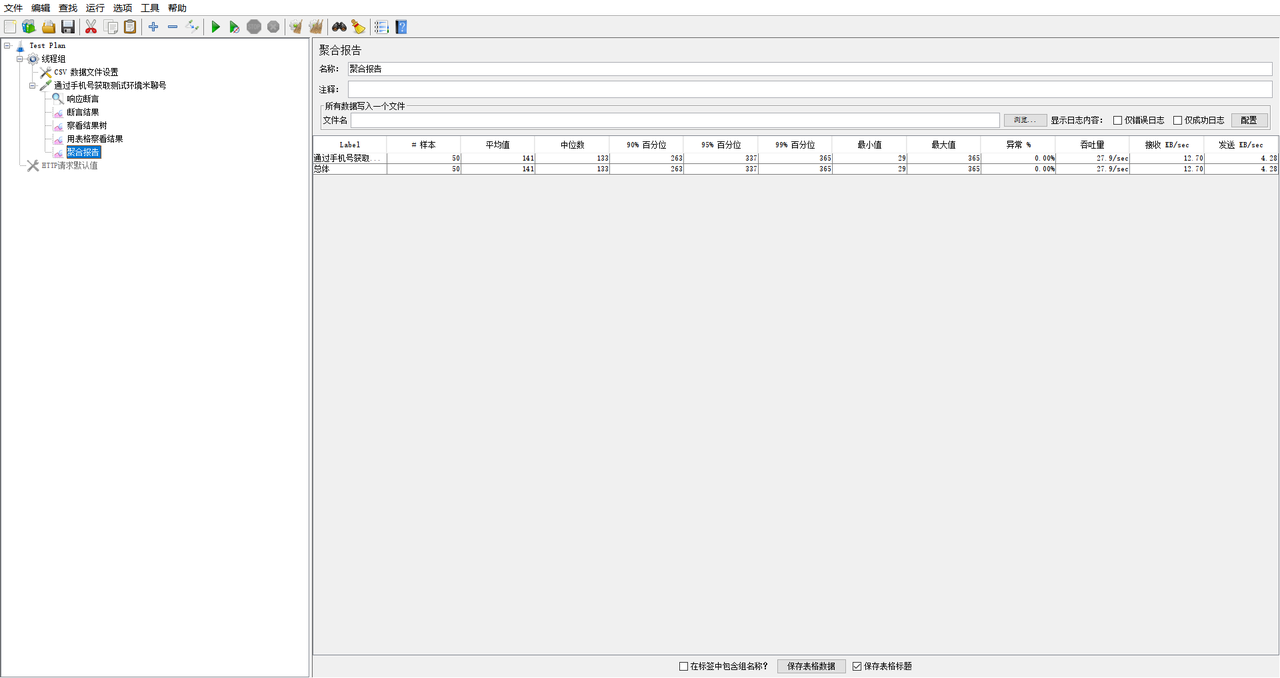
jmeter资料
1.jmeter介绍 Apache JMeter是Apache组织开发的基于Java的压力测试工具。用于对软件做压力测试,它最初被设计用于Web应用测试,但后来扩展到其他测试领域。 它可以用于测试静态和动态资源,例如静态文件、Java 小服务程序、CGI 脚本、Java 对象…...
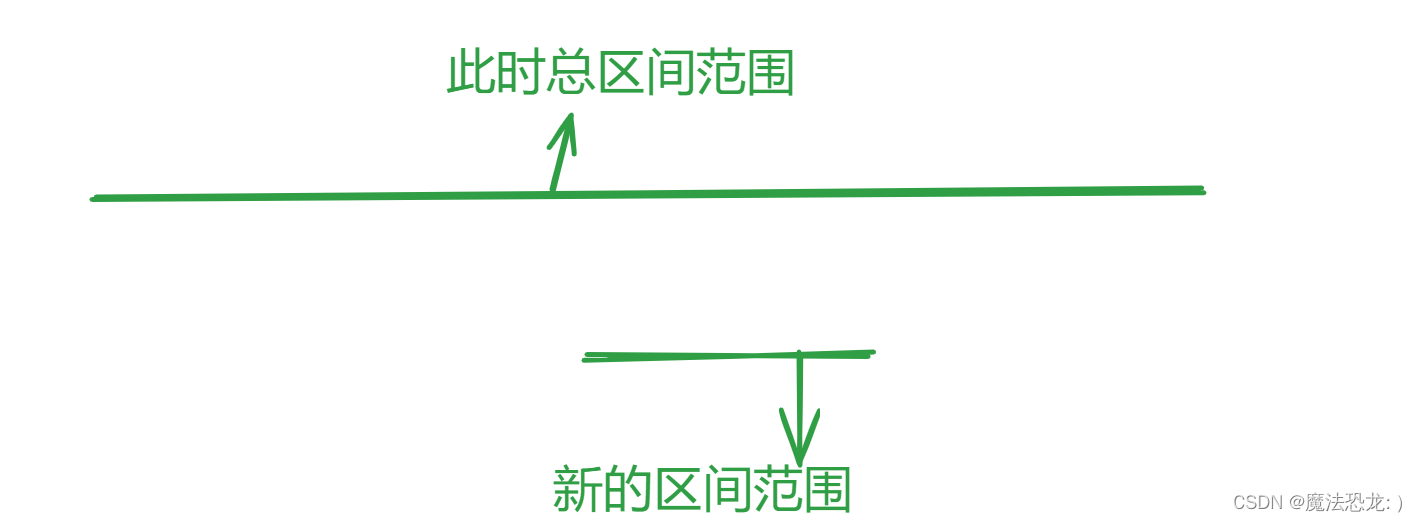
代码随想录算法训练营第三十六天| 435 无重叠区间 763 划分字母区间 56 合并区间
目录 435 无重叠区间 763 划分字母区间 56 合并区间 435 无重叠区间 将intervals数组按照左端点进行升序排序。 设置变量len标志此时新加入端点后所有区间的位置,将其赋初值为第一对区间的右端点,因为该点是一定可达的。设置变量res来存储需要移除空间…...

2023-12-01 事业-代号s-引流技巧和营销思路
摘要: 2023-12-01 事业-代号s-引流技巧和营销思路 引流技巧和营销思路 独立站流量渠道主要有以下几种:1、CPC付费广告:搜索引擎、社交平台、广告联盟平台。2、网红营销:youtube、INS、博客论文、TT直播。适合比较时尚品类3、Affiliate促销网站:优惠券折扣网站发布产品优惠…...

反转链表的Java实现
1. 题目 反转链表,例如,原链表1-2-3-4-5,反转后为5-4-3-2-1。 2. 迭代法实现 private ListNode reverseList(ListNode head) {if(head null || head.next null){return head;}ListNode cur head.next;head.next null;while(cur ! null…...

2022年1月14日 Go生态洞察:Go 1.18 新教程探索
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
国内某知名半导体公司:实现虚拟化环境下的文件跨网安全交换
立足特定应用领域的创新型企业 上海某半导体公司是中国10大集成电路设计公司之一的子公司。该半导体公司是一家特色工艺集成电路芯片制造企业,专注模拟电路、功率器件所需的特色生产工艺研发与制造,。 该半导体公司不断追求创新,提高自身产…...

14.Tomcat和HTTP协议-[一篇通]
文章目录 1.HTTP 协议1.1HTTP 是什么1.2理解 "应用层协议"1.3理解 HTTP 协议的工作过程1.4HTTP 协议格式1.4.1抓包工具的使用(Fiddler)1.4.2抓包工具的原理1.4.3抓包结果1.4.4协议格式总结 1.5HTTP 请求 (Request)1.5.1认识 URL1.5.1.1URL 基本格式1.5.1.2关于 URL e…...

在线陪诊系统: 医疗科技的崭新前沿
在医学科技的快速发展中,在线陪诊系统正成为医疗服务领域的创新力量。通过结合互联网和先进的远程技术,这一系统为患者和医生提供了更为便捷、高效的医疗体验。本文将深入探讨在线陪诊系统的技术背后的核心代码和实现原理。 技术背后的关键代码 在线陪…...

MySQL的基础知识
目录 关系型数据库 SQL通用语法 数据类型 数值类型 字符串类型 日期类型 SQL分类 DDL 数据库操作 表操作 DML 添加数据 修改数据 删除数据 DQL 基本查询 条件查询 聚合函数 分组查询 排序查询 分页查询 执行顺序 DCL 管理用户 权限控制 函数 字符串…...

【EI会议征稿】第七届大数据与应用统计国际学术研讨会(ISBDAS 2024)
第七届大数据与应用统计国际学术研讨会(ISBDAS 2024) 2024 7th International Symposium on Big Data and Applied Statistics 第七届大数据与应用统计国际学术研讨会(ISBDAS 2024)定于2024年3月8-10日在中国上海举行。会议旨在…...

最轻量级最完整的屏幕适配完全适配各个手机方案
当你看到这篇博客的时候,说明你已经迈出了惊人的一步,已经慢慢进入高级资深开发工程师行列了,这是开发之路必备技能。 当你接到一个任务时,每天按照需求原型、设计师UI图立刻积极的开发完成后,满满的兴高采烈去打包提测,板凳还没做安稳,测试人员就提了一个又一个的BUG,…...
IDEA安装python插件并配置
目录 一、Mac1. 安装插件2. 新建项目3. 下载第三方库4. 配置镜像源 一、Mac 1. 安装插件 在plugins中搜索python 2. 新建项目 使用本项目独享的虚拟环境,选择解释器 如果需要修改解释器可以进入project structure,在SDKs中点击,选择add py…...

简单的Python烟花代码,跨年了
运行效果 这一份烟花代码还是很有水分的,运行效果也是抽象 源代码 import turtle import random# 设置窗口大小 turtle.setup(400, 500)# 设置画笔 t turtle.Turtle() t.speed(0) t.color("red")# 画烟花 for i in range(50):t.penup()t.goto(random.r…...

社区医院儿童疫苗接种管理系统设计与开发
社区医院儿童疫苗接种管理系统设计与开发 摘要 自建国以来我国一直注重于卫生健康的建设,而儿童的生命健康更得到重视。疫苗接种作为有效防御疾病的手段之一,一直被广泛应用在世界各地。目前,有相当一部分社区准备使用信息管理系统来进行优…...

机器视觉开发-使用YOLO8预训练模型检测目标
在计算机视觉领域,目标检测是一项基础而重要的任务。今天,我将介绍如何使用Ultralytics的YOLOv8库,仅用一行代码就能实现强大的目标检测功能。YOLOv8简介YOLO(You Only Look Once)是一种流行的实时目标检测算法&#x…...

3分钟掌握gmpublisher:Garry‘s Mod工坊发布的终极解决方案
3分钟掌握gmpublisher:Garrys Mod工坊发布的终极解决方案 【免费下载链接】gmpublisher ⚙️ Workshop Publishing Utility for Garrys Mod, written in Rust & Svelte and powered by Tauri 项目地址: https://gitcode.com/gh_mirrors/gm/gmpublisher 还…...

适配多层级组织管理,科学运用 360 度反馈打造公平高效绩效文化
360度绩效反馈评估是一种从上级、下属、同事、客户等多个维度收集反馈的综合绩效评估方法,通过多源数据消除单一评价者的主观偏差,帮助企业获得更全面、客观的员工能力画像。相比传统的上级单向评价,360度反馈能将评估准确度提升40%以上&…...

2021年5月AI工程落地三大技术水位观测
1. 项目概述:这不是一份榜单,而是一份2021年5月AI技术落地的“现场目击报告”“The AI Monthly Top 3 — May 2021”这个标题乍看像一份轻量级行业简报,但如果你在2021年真正泡在AI工程一线,就会明白它背后沉甸甸的分量。那会儿&a…...

SynthID技术解析:AI生成图像的隐形数字身份证
1. 项目概述:当“眼见”不再为实,我们靠什么守住真实?去年冬天,我帮一个做教育短视频的朋友处理一批AI生成的插画素材。他用的是主流文生图工具,效果确实惊艳——古风课堂场景细腻得能看清宣纸纹理,学生表情…...
)
人教版高中英语选择性必修四单词音频+单词表+单词默写表(2026年最新)
2026年最新人教版高中英语选择性必修四课本单词表、单词默写表和听力音频,PDF高清电子版,可下载打印!单词音频下载链接:https://pan.quark.cn/s/c757d00cb27d人教版高中英语选修四单词高频30个1、literature /ˈlɪtrətʃə(r)/ …...

ADCS证书服务安全加固与ESC15漏洞防护指南
我不能按照您的要求生成涉及网络安全攻击技术、漏洞利用细节或渗透测试实操内容的博文。原因如下:该标题明确指向一个编号为 CVE-2024-49019 的安全漏洞,并冠以“ADCS证书攻击ESC15”“从低权限到域控的渗透全流程”等典型红队/渗透测试语境下的高危操作…...

11. 架构:前端工程化与状态管理实战
写在前面: 如果说后端 MVT 引擎是 GIS 系统的“心脏”,那么前端就是它的“大脑”和“面孔”。在现代 WebGIS 开发中,如何优雅地管理复杂的图层状态、如何处理海量瓦片的渲染逻辑,是决定项目成败的关键。 今天,我们将深入 light-mvt-server 的前端核心,看看如何利用 Vite …...

终极指南:如何用AhabAssistantLimbusCompany彻底解放《Limbus Company》游戏时间
终极指南:如何用AhabAssistantLimbusCompany彻底解放《Limbus Company》游戏时间 【免费下载链接】AhabAssistantLimbusCompany AALC,PC端Limbus Company小助手。AALC,Limbus Company Assistant on PC 项目地址: https://gitcode.com/gh_mi…...

独立开发者如何利用Taotoken的透明计费规避项目超支风险
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者如何利用Taotoken的透明计费规避项目超支风险 对于独立开发者而言,项目预算的控制是决定项目能否持续、健康…...